基于實時負載轉矩反饋補償的永磁同步電機變增益PI控制
2017-01-03 03:05:51李葉松
電工技術學報 2016年23期
關 欣 李葉松
(華中科技大學自動化學院 武漢 430074)
基于實時負載轉矩反饋補償的永磁同步電機變增益PI控制
關 欣 李葉松
(華中科技大學自動化學院 武漢 430074)
為了減小負載轉矩擾動對永磁同步電機轉速的影響,對負載轉矩擾動下永磁同步電機(PMSM)伺服系統數學模型的頻域特性進行了研究,總結出負載轉矩擾動和速度PI控制器參數之間的關系,提出了基于負載轉矩反饋補償的永磁同步電機變增益PI控制方案。變增益PI(VGPI)控制器根據轉速信號中特定頻率分量的變化,進行控制器增益的實時調節;同時采用FPGA器件設計并實現了基于Kalman濾波器的負載轉矩觀測器,能夠對負載轉矩擾動進行實時觀測和補償,提高了永磁同步電機伺服系統對負載轉矩擾動的抑制能力。實驗結果驗證了控制策略的有效性。
永磁同步電機 負載轉矩擾動 變增益PI 負載轉矩觀測器
0 引言
近年來,由于永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)具有結構簡單、控制性能優越等特點[1],以其作為控制對象的交流伺服系統得到了廣泛應用。交流伺服系統的控制目標之一是確保輸出轉速能夠很好地跟隨指令的變化,但負載轉矩擾動的存在必然會導致轉速波動的產生,為了實現高準確度、高性能的伺服控制,需要PMSM伺服系統的速度控制具有更高的性能。
PMSM伺服系統速度環控制器通常采用的是PI控制方式,具有結構簡單、調試方便、便于理解等優點。但由于多數PI控制器的控制參數在系統的整個運行過程中保持不變,設計人員很難找到最優的控制參數,既能滿足系統全范圍穩定又能保證系統有足夠高的帶寬,以應對運行過程中的各種負載擾動[2]。因此采用控制參數變增益的思想來設計新型控制器或控制架構以抑制負載轉矩擾動成為國內外學者研究的熱點。隨著控制理論的發展以及微處理芯片運算能力的提高,自適應抗擾控制[3-5]、神經網絡控制[6]、滑模控制[7-9]和其他前沿的控制策略[10]被應用于PMSM控制。然而這些算法大多實現起來比較復雜,通用性不強,在實際工程應用中會有諸多限制。另一方面,在PMSM伺服系統的多閉環控制結構中,轉矩控制具有較高的帶寬,如何利用內環響應的快速性來及時削弱負載轉矩擾動對轉速響應的影響,使得應用負載轉矩觀測并進行前饋補償的控制思想成為廣泛嘗試的研究方向。當前,國內外學者采用了多種結構的觀測器進行負載轉矩的觀測[11-14]。文獻[11]將外加負載轉矩看作是系統擾動,構建了擾動觀測器(Disturbance Observer,DOB)進行負載轉矩的觀測,雖然DOB結構較為簡單,其實質為機械運動方程的變形,在實際工程應用中,DOB的時間常數較難選擇,同時其觀測準確度也會受到機械參數的影響。相較之下,采用Kalman濾波器(Kalman Filter,KF)能夠有效地削弱系統干擾和測量噪聲的影響[1],具有較好的特性,但其計算的復雜性和觀測的實時性是工程應用的難點,目前所廣泛應用的軟件伺服實現方案很難在完成復雜的遞推觀測運算的同時,使其具有較短的觀測周期,因此難以滿足觀測的實時性。
本文通過建立PMSM速度控制模型,推導出從負載轉矩擾動到輸出轉速的傳遞函數。將負載轉矩看作輸入信號,對系統的頻域特性進行分析,總結出負載轉矩擾動響應和速度環PI控制器參數的關系,據此提出了基于負載轉矩反饋補償的PMSM變增益PI控制方案,以減小因負載轉矩擾動所產生的轉速波動并縮短轉速響應的穩定時間。變增益PI(Variable Gain PI,VGPI)控制器一方面保留了傳統PI控制器結構簡單的優點,另一方面也改進了傳統PI控制器固定參數特性的不足,使控制器參數隨運行狀態進行改變,系統具有更強的負載擾動抑制能力[15];同時借助FPGA硬件構建了基于Kalman濾波器的負載轉矩觀測器,觀測器的硬件實現不會占用微處理器的資源和執行時間。此外本文對Kalman遞推算法進行整理,利用FPGA實現了并行運算,縮短了運算時間。變增益PI控制器和負載轉矩觀測器相結合進一步提高了系統對負載轉矩擾動的響應特性。最后在所搭建的實驗平臺上,對本文提出的控制策略的有效性進行了驗證。
1 負載轉矩擾動對PMSM速度控制的影響分析
1.1 擾動模型的傳遞函數表達

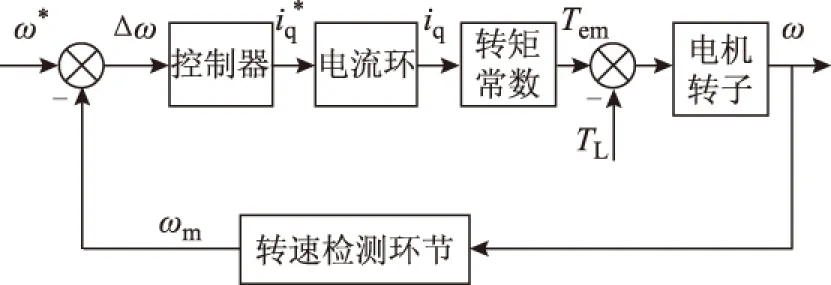
圖1 PMSM速度控制框圖Fig.1 Block diagram of PMSM speed control
圖1中速度環控制器通常采用PI調節器;電流環、轉速檢測等環節相對于電機速度調節具有較高的響應速度,因此可將其近似等效為比例環節(電流環等效結果為電流反饋系數的倒數);電機轉子環節可簡化等效為積分環節,系數為轉動慣量的倒數。由此可得到從負載轉矩到輸出轉速的閉環傳遞函數,如式(1)所示。
(1)
式中,Kcf為電流環反饋系數,A-1;Kt為轉矩常數,N·mA;Kv為速度環PI控制器比例系數;Tv為速度環PI控制器積分時間常數;J為轉動慣量,kg·m2;Kvf為速度環反饋系數,rmin-1。令s=jω,進行系統頻域分析,輸入為負載轉矩擾動,輸出為電機轉速。幅頻特性表達式如式(2)所示。
(2)
式中,K0=KtKvKvf。
1.2 負載轉矩擾動與PI控制參數間的關系
(3)
(4)
(5)
從式(4)可看出,幅頻特性曲線峰值點對應的頻率值與Kt、Kv、Kvf、J、Kcf和Tv等參數有關。因此,如要改變幅頻特性峰值對應頻率,可以對PI控制器的比例系數和積分時間常數進行調整。同時根據式(5)可知,幅頻特性曲線的最大值可通過改變PI控制器的比例系數進行調節,增大PI調節器的比例系數Kv能夠減小幅頻特性曲線的峰值,從而在一定程度上抑制負載轉矩擾動對伺服系統轉速的影響。
針對式(2),圖2所示的結果可以驗證以上分析(其中仿真參數:J=0.000 324 kg·m2,Kt=0.68 N·mA,Kcf=1 305 A-1,Kvf=39 116.8 rmin-1)。圖2中曲線1對應的參數為Kv=0.012 7,Tv=0.025;曲線2對應的參數為Kv=0.012 7,Tv=0.012 5;曲線3對應的參數為Kv=0.038 1,Tv=0.025。當Tv=0.025保持不變時,增大Kv,可以看出幅頻曲線峰值明顯減小,同時峰值對應的頻率值也相應增大;當Kv=0.012 7保持不變時,減小Tv可以看出幅頻曲線峰值幾乎不變,但峰值對應的頻率值增大,波峰整體右移。
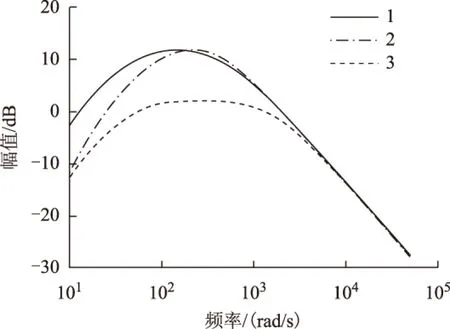
圖2 PMSM伺服系統負載擾動模型的幅頻特性Fig.2 Amplitude-frequency characteristics of PMSM servo system disturbance model
由此可知,PMSM伺服系統對負載轉矩擾動的轉速響應與控制器參數的選擇有關,通過動態調節速度環PI控制器的控制參數,可以實現對負載轉矩擾動的全運行范圍實時抑制。
2 PMSM速度控制策略的設計和實現
2.1 PI變增益策略的推導和設計
根據前面的分析可知,當PMSM伺服系統以負載轉矩作為系統輸入、轉速作為系統輸出時,系統的頻域特性具有帶通濾波器的特點:在式(4)所示的頻率下,幅頻特性曲線達到最大值,對應該頻率的擾動分量會對轉速造成最大的影響;遠離該頻率值,幅頻曲線對應的幅值會逐漸減小,即擾動對于轉速的影響也相應減小。設該頻率值為ω0,負載轉矩擾動中對應頻率為ω0的信號分量將會被顯著放大,影響電機轉速響應。因此,可以通過檢測轉速中頻率為ω0的信號分量的變化,將其作為PI控制器比例系數變增益的依據,以抑制負載轉矩擾動的影響;此外根據式(4),為了確保比例系數變化的同時不會對目標頻率ω0產生影響,也需要變化積分時間常數,以保證比例系數和積分時間常數的比值恒定。
轉速信號中頻率為ω0的分量的提取可以采用式(6)所示的帶通濾波器實現。轉速信號經過帶通濾波器得到ωout,利用ωout可構造如式(7)所示的PI變增益控制策略。
(6)
(7)
通過計算ωout和ω*/k的比值,當負載轉矩突變時,增大比例系數可以提高伺服系統的剛性,抑制擾動。
根據式(4),為了使幅頻曲線峰值的對應頻率在比例系數變化的同時能夠保持不變,PI控制器的積分時間常數的變化規律如式(8)所示,目的是保證比例系數與積分時間常數的比值保持恒定,確保所設計的帶通濾波器的有效性。
(8)
2.2 負載轉矩的觀測與補償
進一步地,為了利用內環響應的快速性,可以考慮設計基于Kalman濾波器結構的負載轉矩觀測器,其中的關鍵問題是對負載轉矩擾動進行實時觀測和及時補償。PMSM運動方程如式(9)所示。
(9)
式中,iq為q軸電流,A;B為黏性摩擦系數,N·m(rads);ω為機械角速度,rads;θ為機械角度,rad;Td為負載轉矩TL和摩擦轉矩Bω之和,即Td=TL+Bω,假設負載轉矩TL在一個測量采樣周期內是一個定值,即dTLdt=0,由此可得dTddt=d(Bω)dt。對式(9)進行離散化,Kalman濾波器可以設計為如下形式[17]。
(10)
式中,x為狀態變量,x=[ω θ Td]T;u為輸入信號,u=iq;y為測量信號,y=θ;w為系統噪聲,主要包括系統模型和參數偏差;v為測量噪聲,主要包括測量器件的量化誤差。式(10)中系數矩陣為
Kalman濾波算法可分為觀測量的遞推運算和濾波增益矩陣的遞推運算兩部分,兩者之間既有聯系又相對獨立,可以并行實現遞推算法。
觀測量的遞推運算首先在已知k-1時刻的觀測結果x(k-1)和輸入信號u(k-1)的前提下,利用x(k)=Ax(k-1)+Bu(k-1),算出k時刻觀測結果x(k)的預估值;然后由x(k)的預估值,利用y(k)=Cx(k),算出k時刻測量值y(k)的估計值,求出其與y(k)之間的偏差e(k),并與濾波增益矩陣K(k)相乘,得到x(k)預估值的修正值K(k)e(k);最后將x(k)的預估值和修正值K(k)e(k)相加,可得到x(k)。
濾波增益矩陣的遞推運算首先根據式(11)求出x(k)估計值的誤差協方差矩陣P1(k),然后根據式(12)求出濾波增益矩陣K(k),最后根據式(13)求出P(k)并儲存,供下次使用。
P1(k)=AP(k-1)AT+Q(k-1)
(11)
K(k)=P1(k)CT[CP1(k)CT+R(k)]-1
(12)
P(k)=P1(k)-K(k)CP1(k)
(13)
式中,P(k-1)為x(k-1)的誤差協方差矩陣;A為系統矩陣;Q為系統擾動矢量ω的協方差矩陣;R為測量噪聲矢量v的協方差矩陣;C為測量矩陣。
在計算完成后,將觀測出的轉矩值Td轉換成對應的電流量,對速度環控制器輸出的電流環指令信號進行前饋補償,可以和變增益PI控制器共同作用削弱負載轉矩擾動帶來的不良影響。
3 控制策略實現特性分析
3.1 PMSM伺服系統速度控制策略參數魯棒性分析
變增益PI控制器和負載轉矩觀測器的建立都需要較為準確地獲知伺服系統的參數,特別是負載轉動慣量參數。由于在系統的運行過程中,負載轉動慣量可能會發生一定范圍的變化,因此需要針對這一因素,分析控制策略的參數魯棒性。對于基于Kalman濾波器的負載轉矩觀測器來說,由于Kalman濾波器考慮了系統擾動,因此可以通過設置系統擾動矢量,一定程度上滿足參數魯棒性的要求。下面主要針對變增益PI控制分析其參數魯棒性。

(14)
在PMSM伺服系統以負載轉矩擾動作為輸入時,式(14)可看作對應幅頻特性曲線的帶通寬度。由帶通濾波器幅頻特性可知,對數坐標下ω1、ω2關于ω0對稱,可得式(15)。聯立式(14)、式(15)可得ω1、ω2的表達式如式(16)所示。
(15)
(16)
若轉動慣量發生變化,即J′=aJ,其中J為系統初始轉動慣量,J′為系統當前實際的轉動慣量,a為變化比例系數。轉動慣量的變化將導致ω0、ω1、ω2的變化,結果如式(17)所示。
(17)

(18)式中,K為伺服系統閉環環路增益,K=KtKvKvf/(JKcf)。

3.2 負載轉矩觀測器實時性分析
通常,負載轉矩觀測器只有具備良好的實時性,才能實現對擾動的及時補償。為了提高觀測器的實時性,首先需要觀測器具有較高的采樣頻率和較短的運算時間,以保證其在采樣周期內能夠完成一次觀測運算。因此,本文采用FPGA對負載轉矩觀測算法進行硬件實現,一方面可以減輕伺服系統微處理器的計算負擔;另一方面,根據前述分析,Kalman濾波算法的各推導步驟之間具有相對獨立的特點,因此可針對這一特征借助FPGA并行實現觀測器算法,進一步縮短運算時間。實現過程如圖3所示。
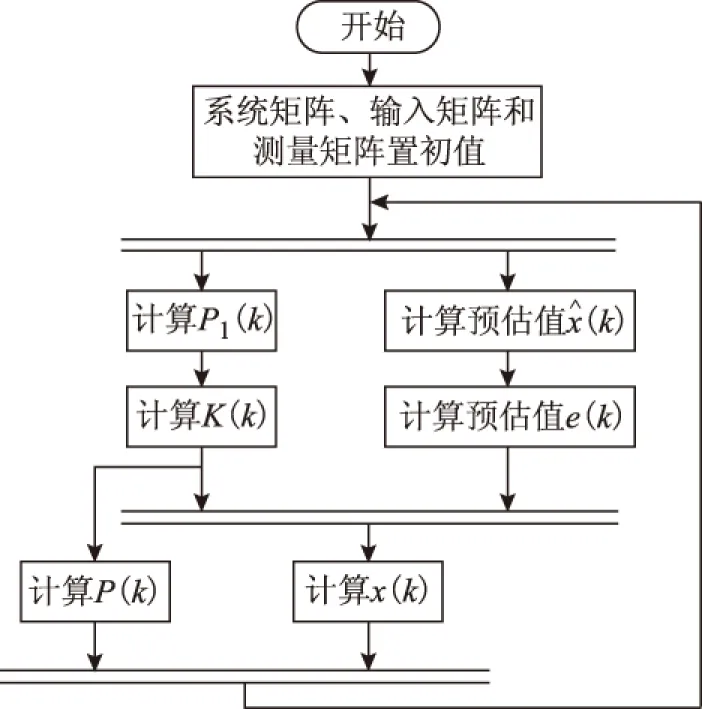
圖3 負載轉矩觀測硬件實現流程Fig.3 Load torque observer hardware-based implementation flow chart
其次,為了提高觀測器的實時性,需要適當提高觀測器的收斂速度。由于Kalman濾波采用的是預測加修正的計算模式,觀測器的收斂速度與迭代計算次數相關,也與每次計算的修正量有關,而每次計算得到的修正量與濾波增益矩陣K(k)有關。因此如果能夠增大每次遞推運算后得到的K(k)值,就能夠加快負載轉矩觀測器的收斂速度[18,19]。雖然K(k)的推導需要大量的矩陣運算,但本文根據伺服系統的特點,對K(k)的遞推過程做一定簡化。將矩陣P1(k)、向量C=[0 1 0]代入式(12)可得式(19)。
(19)
式中,p12、p22、p32為矩陣P1(k)第二列的對應元素;R為測量噪聲矢量的協方差矩陣,由于測量信號只有機械角度一個物理量,因此R為標量。
從式(19)可知,測量噪聲越大,R就越大,導致K(k)的對應元素就越小,Kalman濾波的收斂速度就越慢;反之測量噪聲越小,收斂速度就相對越快。因此提高位置反饋的分辨率、減小量化誤差可以提高負載轉矩觀測器的收斂速度。
3.3 控制策略實現
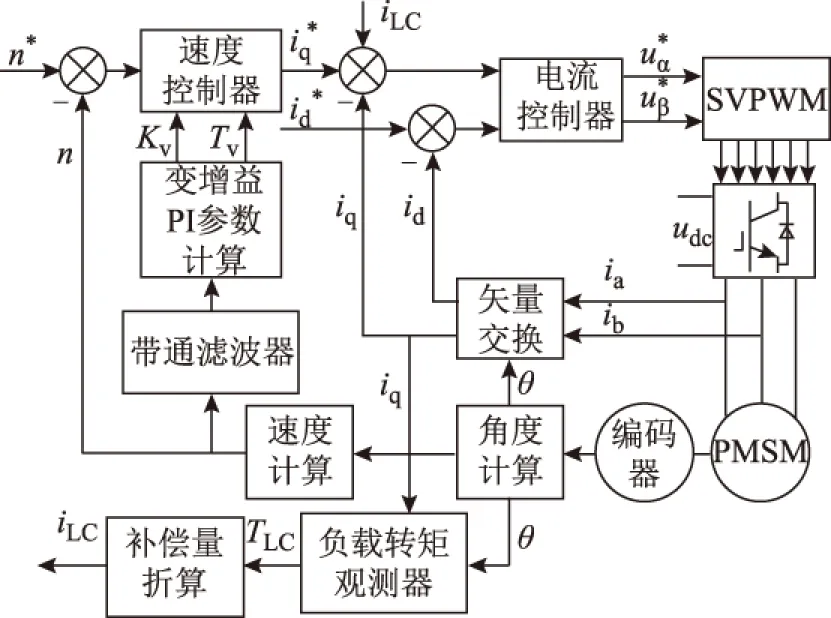
圖4 PMSM速度控制方案框圖Fig.4 PMSM speed control strategy diagram
4 實驗結果與分析
根據圖4所示的原理框圖,系統控制部分主要由意法半導體公司的STM32F417ARM微處理器和Altera公司的EP4CE22FPGA組成,PMSM伺服系統實驗平臺如圖5所示。其中ARM處理器主要負責伺服系統的位置信號采集、速度環控制、速度環變增益算法實現等功能;FPGA主要負責伺服系統電流信號采集、電流環矢量控制算法運算、負載轉矩觀測等功能。實驗中電流環采樣控制周期為50 μs,負載轉矩觀測器觀測周期與電流環采樣控制周期相同,速度環控制周期為100 μs。采用增量式編碼器進行位置測量,編碼器的分辨率為24 000 p/r,電機參數見表1。
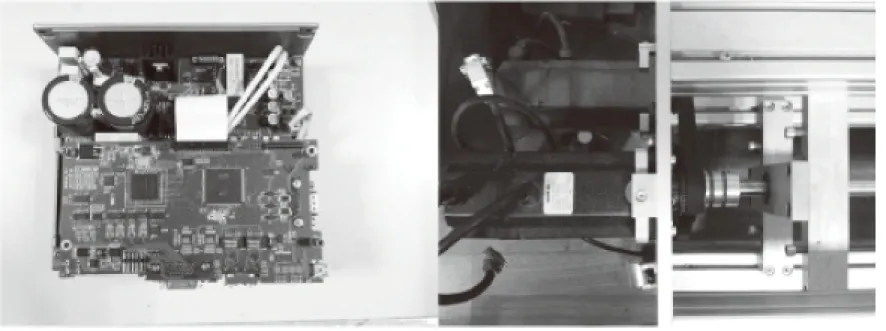
圖5 永磁同步電機伺服系統實驗平臺Fig.5 The test bench of the PMSM servo system
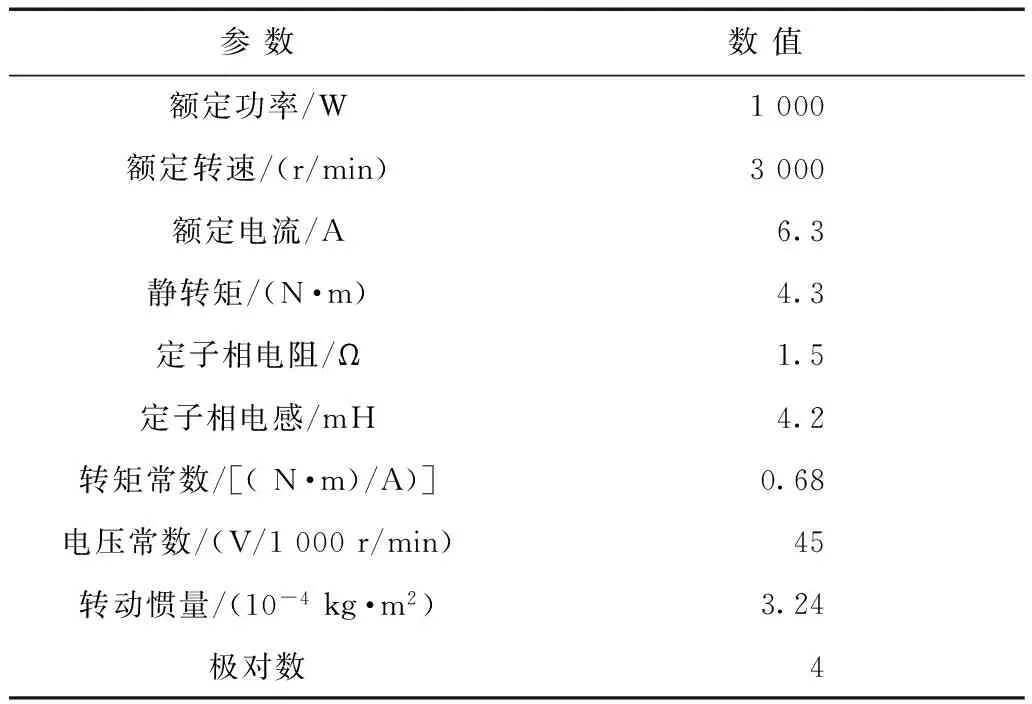
參數數值額定功率/W1000額定轉速/(r/min)3000額定電流/A6.3靜轉矩/(N·m)4.3定子相電阻/Ω1.5定子相電感/mH4.2轉矩常數/[(N·m)/A)]0.68電壓常數/(V/1000r/min)45轉動慣量/(10-4kg·m2)3.24極對數4
分別采用本文提出的控制策略以及傳統PI控制方式對電機進行負載轉矩突變實驗。首先,系統輸入階躍轉速指令,轉速指令分別設為200 r/min、600 r/min和1 000 r/min;然后突加約2 N·m的負載轉矩,實驗結果如圖6所示。可以看出,當電機運行在高速(1 000 r/min)、中速(600 r/min)和低速(200 r/min)下,應用本文所提出的負載轉矩擾動抑制策略,不僅可有效減小負載轉矩突變所產生的轉速波動,而且可以縮短轉速恢復時間,減小負載轉矩擾動對伺服系統轉速帶來的不利影響。
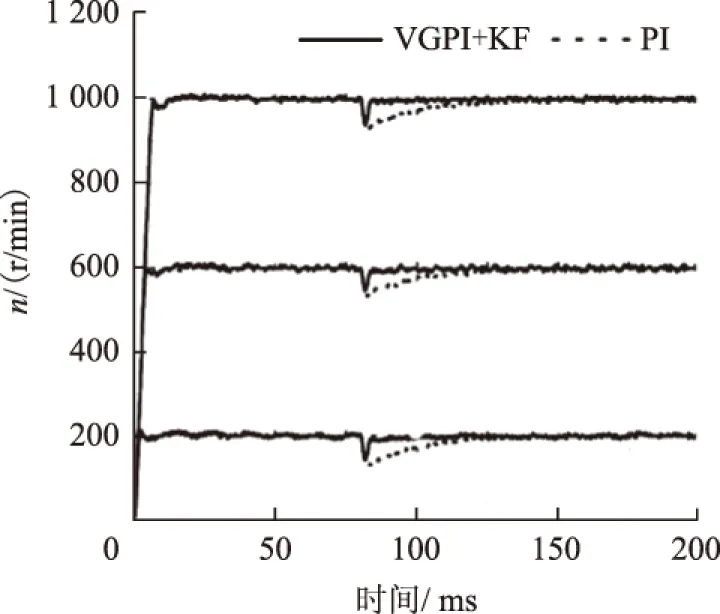
圖6 負載轉矩突變情況下控制效果比較Fig.6 Control effect comparison under load torque mutation
轉速波動期間(約5 ms),變增益PI控制器參數Kvg、Tvg的變化曲線如圖7所示。初始比例系數Kv設置為13(定標為Q10),初始積分時間常數Tv設置為20 ms。隨著轉速波動的變化,變增益PI控制器的比例系數先增大后減小,同時為了保證比例系數和積分時間常數的比值恒定,積分時間常數也在相同的區間進行對應的變化。
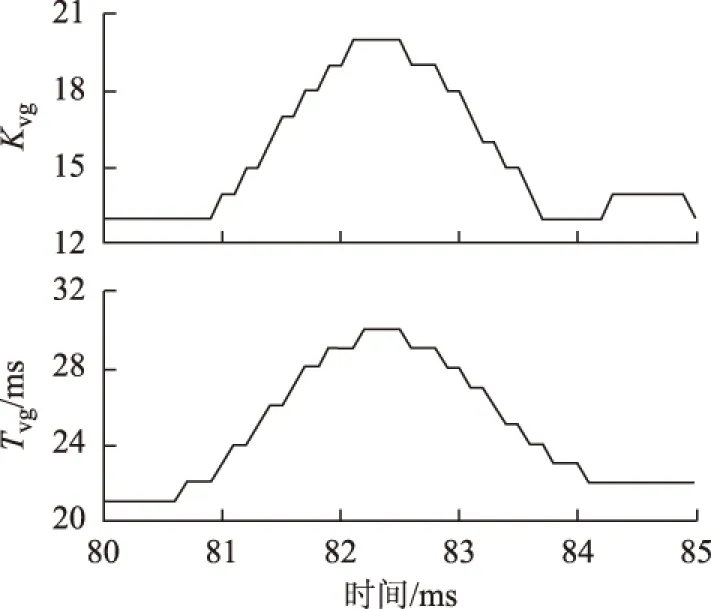
圖7 變增益PI控制器的參數變化曲線Fig.7 The variation curve of the parameters of VGPI
負載轉矩觀測器對負載轉矩的觀測結果如圖8所示,觀測結果中包含負載轉矩和摩擦轉矩兩部分。從圖8中可以看出,當負載轉矩突然增大,負載轉矩觀測器在很短的時間內上升到2 N·m附近。從上升階段的局部放大圖中可以看出對于負載轉矩突變信號,負載轉矩觀測器約用了2 ms實現了負載轉矩的跟蹤觀測,其中受觀測器遞推運算以及輸入信號的量化誤差影響,負載轉矩觀測器結果存在一定偏差,但不會影響系統運行。
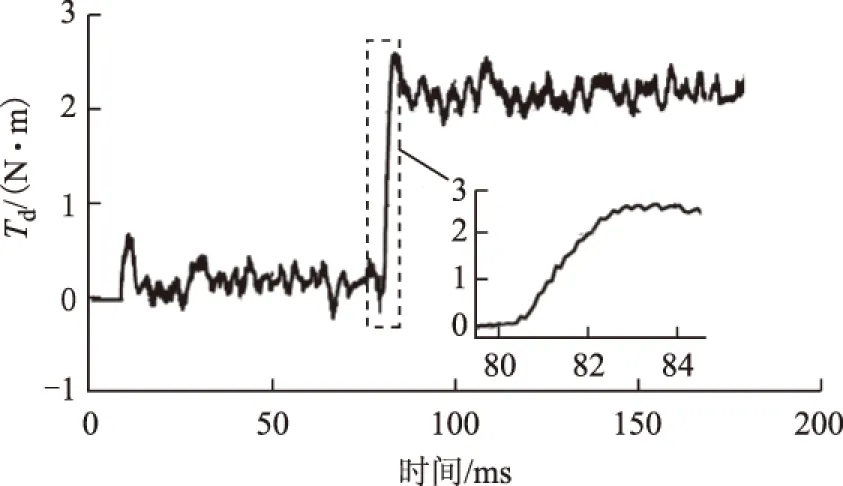
圖8 負載轉矩觀測結果Fig.8 Observed load torque
為了驗證控制策略的參數魯棒性,分別采用不同的轉動慣量值進行控制算法的設計和實驗分析。在負載轉矩發生突變時,轉速的擾動響應如圖9所示(取轉速波動部分放大顯示),可以看出轉速響應特性基本一致,轉動慣量在一定范圍的變化不會對控制算法的有效性造成明顯影響。

圖9 參數魯棒性測試Fig.9 The test of parameter robustness
5 結論
本文提出了基于實時負載轉矩反饋補償的永磁同步電機變增益PI控制方案,通過對PMSM伺服系統進行頻域分析,設計了變增益PI控制器,彌補了固定控制參數實現方案的不足;同時設計并硬件實現了基于Kalman濾波的負載轉矩觀測器,對負載轉矩擾動進行及時地觀測補償。實驗證明,本文提出的控制策略能夠有效抑制負載轉矩擾動所帶來的不良影響,具有較強的實時性和參數魯棒性,便于工程實現與應用。
[1] 鄭澤東,李永東,肖曦,等.永磁同步電機負載轉矩觀測器[J].電工技術學報,2010,25(2):30-36. Zheng Zedong,Li Yongdong,Xiao Xi,et al.Load torque observer of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2010,25(2):30-36.
[2] Liu Xing,Liang Deliang,Yang Xinning.Dynamic characteristics test of permanent magnet synchronous machine with sinusoidal torque load[C]//Ninth International Conference on Ecological Vehicles and Renewable Energies,Monte-Carlo,Monaco,2014:1-4.
[3] Zhao Shouhua,Chen Yangsheng,Mao Yongle.Adaptive load observer-based feed-forward control in PMSM drive system[J].Transactions of the Institute of Measurement and Control,2015,37(3):414-424.
[4] 劉英培,栗然,梁海平.基于最小二乘支持向量機優化自抗擾控制器的永磁同步電機直接轉矩控制方法[J].中國電機工程學報,2014,34(27):4654-4664. Liu Yingpei,Li Ran,Liang Haiping.Direct torque control for permanent magnet synchronous motor based on active-disturbance rejection control optimized by least squares support vector machines[J].Proceedings of the CSEE,2014,34(27):4654-4664.
[5] Choi H H,Leu V Q,Choi Y S,et al.Adaptive speed controller design for a permanent magnet synchronous motor[J].IET Electric Power Applications,2011,5(5):457-464.
[6] Yu Jinpeng,Shi Peng,Dong Wenjie,et al.Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors[J].IEEE Transactions on Neural Networks and Learning Systems,2015,26(3):640-645.
[7] 陸婋泉,林鶴云,馮奕,等.永磁同步電機無傳感器控制的軟開關滑模觀測器[J].電工技術學報,2015,30(2):106-113. Lu Xiaoquan,Lin Heyun,Feng Yi,et al.Soft switching sliding mode observer for PMSM sensorless control[J].Transactions of China Electrotechnical Society,2015,30(2):106-113.
[8] Zhang Changfan,Jia Lin,He Jing.Load torque observer based sliding mode control method for permanent magnet synchronous motor[C]//25th Chinese Control and Decision Conference,Guiyang,China,2013:550-555.
[9] 易伯瑜,康龍云,陶思念,等.永磁同步電機抗擾高階滑模觀測器設計[J].電工技術學報,2014,29(5):132-140. Yi Boyu,Kang Longyun,Tao Sinian,et al.Design of robust high order sliding mode observer for permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2014,29(5):132-140.
[10]王少威,萬山明,周理兵,等.利用蟻群算法辨識PMSM伺服系統負載轉矩和轉動慣量[J].電工技術學報,2011,26(6):18-25. Wang Shaowei,Wan Shanming,Zhou Libing,et al.Identification of PMSM servo system’s load torque and moment of inertia by ant colony algorithm[J].Transactions of China Electrotechnical Society,2011,26(6):18-25.
[11]Lee K,Choy I,Back J,et al.Disturbance observer based sensorless speed controller for PMSM with improved robustness against load torque variation[C]//IEEE 8th International Conference on Power Electronics and ECCE Asia,Jeju,South Korea,2011:2537-2543.
[12]Li Shihua,Zhou Mingming,Yu Xinghuo.Disturbance observer based terminal sliding mode control method for PMSM speed regulation system[C]//30th Chinese Control Conference,Yantai,China,2011:6287-6292.
[13]Kim Hyun-Sik,Ko Jong-Sun.Experimental position control of PMSM using disturbance observer with system parameter compensator[C]//11th International Conference on Control,Automation and Systems,Gyeonggi-do,Korea,2011:1396-1401.
[14]Du Limin,Zhang Ke,Jin Guang.Linear auto disturbance rejection controller for vector controlled PMSM drive system[C]//International Conference on Transportation,Mechanical,and Electrical Engineering,Changchun,China,2011:879-882.
[15]Mechernene A,Chrifi-Alaoui L,Zerikat M,et al.VGPI controller for high performance speed tracking of induction motor drive[C]//Proceedings of the 3rd International Conference on Systems and Control,Algiers,Algeria,2013:472-477.
[16]秦憶,周永鵬,鄧忠華,等.現代交流伺服系統[M].武漢:華中理工大學出版社,1995.
[17]Shi Tingna,Wang Zheng,Xia Changliang.Speed measurement error suppression for PMSM control system using self-adaption Kalman observer[J].IEEE Transaction on Industrial Electronics,2015,62(5):2753-2763.
[18]Yeh H G.Real-time implementation of a narrow-band Kalman filter with a floating-point processor DSP32[J].IEEE Transactions on Industrial Electronics,1990,37(1):13-18.
[19]Neto J V F,Farid J A,de Abreu J A P.QR-duality tuning of standard Kalman filter oriented to rocket velocity indirect measurement[C]//12th International Conference on Computer Modelling and Simulation,Cambridge,United Kingdom,2010:74-79.
Variable Gain PI Control Method for Permanent Magnet Synchronous Motor Based on Load Torque Feedback Real-Time Compensation
Guan Xin Li Yesong
(School of Automation Huazhong University of Science and Technology Wuhan 430074 China)
In order to reduce the effects caused by load torque disturbances,the frequency characteristics of permanent magnet synchronous motor(PMSM) servo system speed response model under load torque disturbance are studied.Based on the relationship between the speed fluctuation caused by load torque disturbance and the parameters of speed PI regulator,a variable gain PI(VGPI) control method for PMSM based on load torque feedback compensation is proposed.According to the variation of the specific frequency component of speed,the variable PI controller gain can be real-time modified in this control strategy.Meantime,a load torque observer based on Kalman Filter is designed and implemented by FPGA,which guarantees that the variation of load torque can be observed and compensated in real time.The capacity of load torque disturbance rejection of PMSM system is improved.Experimental results are given to verify the validity of the control scheme.
Permanent magnet synchronous motor(PMSM),load torque disturbance,variable gain PI (VGPI),load torque observer
國家科技重大專項項目資助(2012ZX04001- 022)。
2015-07-05 改稿日期2015-12-12
TM351
關 欣 男,1990年生,碩士研究生,研究方向為數字化交流傳動控制系統。
E-mail:guanxin_hust@163.com(通信作者)
李葉松 男,1970年生,教授,博士生導師,研究方向為數字化交流傳動控制系統、智能化控制以及現場總線網絡化運動控制。
E-mail:hustysli@sina.com
