并聯臂式3D打印機機構設計與研究
2016-12-27 19:12:51張小建夏煒煒黃嘉昊解乃軍陸欣云
中國高新技術企業 2016年33期
關鍵詞:設計
張小建+夏煒煒+黃嘉昊+解乃軍+陸欣云
摘要:文章針對并聯臂式3D打印機機構展開研究,主要目標是研究一種便攜式可伸縮的并聯臂式3D打印機機構。在傳統3D打印機的基礎上提出并聯臂式虛擬軸設計方案,構造一種新型3D打印機的機構,并將其作為3D打印機運行的本體機構。
關鍵詞:便攜式;并聯臂式;可伸縮;3D打印機;機構設計 文獻標識碼:A
中圖分類號:TP334 文章編號:1009-2374(2016)33-0005-02 DOI:10.13535/j.cnki.11-4406/n.2016.33.003
1 概述
3D打印在國內外是一個新型領域,具有巨大的市場競爭力,不再是依賴于傳統的工藝技術,而是根據設計出的產品模型,打印出想要的實體模型,不需要過多的人力物力就能制造出產品。
本文所設計的3D打印機最新奇的地方在于它的Z軸設計。機器不再采用固定長度的支撐架,而是將帶有出料器和噴頭的打印機安置在3條可伸縮的套筒伸縮器上,這樣的設計使得打印機的整體體積不再受限于構建空間的體積,而能在不使用的時候將打印機收縮成僅有一個公事包的大小。
本文研究的并聯臂式3D打印機實現了可伸縮功能,當開展工作時,結構展開的工作尺寸為818×506×450,打印完成之后,結構收縮后,其尺寸為481×347×350,大大減小機體體積,攜帶存放方便。在提供足夠大的構建空間的同時,能夠根據工作需要自動伸展收縮機構,在不影響甚至是改進設備功能的情況下,改進機體結構,實現可伸縮,便于攜帶,提供設備性能。
2 整體方案設計
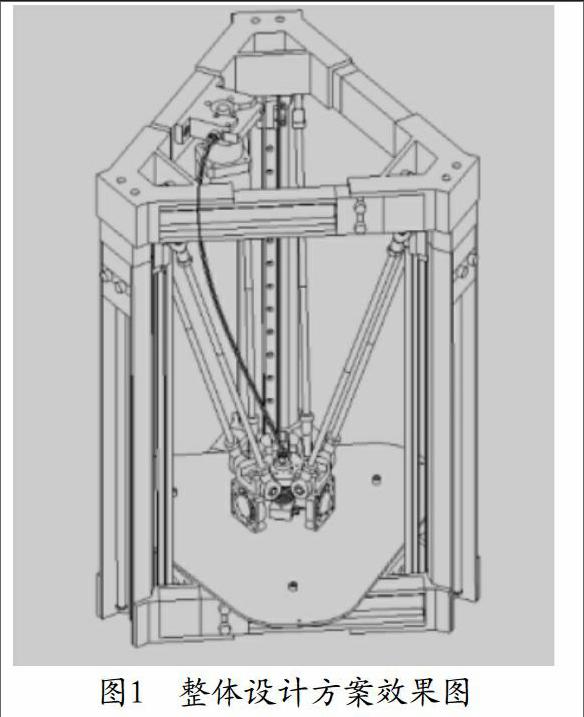
本論文所研究的并聯臂式3D打印機為DELTA機構的一種,從結構形式上來看與Star Like并聯機構、Tsai并聯機構相同,屬于3自由度的三維純移動機構。同大部分的并聯臂式3D打印機構一樣,它主要由三角支撐架機構、并聯臂傳動機構、送料機構、打印頭和平臺組件組成。原先的三角支撐架結構是剛性的,不可伸縮,通過優化改良,將三角支撐架機構設計成可伸縮式機架,其設計方案如圖1所示。這樣的設計方案使3D打印機框架本體所能適應的空間維度更加廣闊,也使打印機適應各種大小零件的打印。三角結構框架的改進達到了伸縮式的目的,使機構本身的靈活性更為突顯。
本設計方案:利用三個滑塊分別在三根直線滑軌上是移動,帶動并聯臂運動,從而形成對X、Y、Z三個運動方向的控制,并聯臂傳動機構還包括動力機構,動力機構包括步進電機和同步帶,步進電機通過同步帶帶動滑塊在直線滑軌上上下移動。由此順序的連接,使整個傳動機構形成一個整體,保證了運動的可靠穩定,為確保打印精度奠定了堅實基礎。步進電機型號為42HS8401,同步帶型號為2GT-6。送料機構置于三角支撐架結構的上端,打印頭設置在可伸縮式機架內部,通過并聯臂傳動機構與可伸縮式機架連接,送料機與打印頭之間通過送料管連通,平臺組件設置在可伸縮式機架底部。自上而下的合理布置使打印機本身的各機構清晰明了,為打印機構提供了一種快捷有效的生產方式。
在產品優化及功能開發中,產品在平臺組件上增設了一個小小的零件——便攜把手,安裝這一零件是為了達到便攜的目的。在不影響機構整體設計,同時又要做到不干涉3D打印機正常工作且不影響其美觀的前提下,將便攜把手安裝在打印平臺的底部,利用它來提起整個機器就會方便多了。
3 功能組件1——可伸縮部件設計
在打印相對較大的零件時,我們也需要足夠大的3D打印機進行打印,以滿足零件本身的空間要求。如果設計一臺能夠滿足較大零件生產的機器,那么它的占地面積勢必會很大,在不需要其工作時,它所占的空間就浪費了。為了避免這樣的情況,也為并聯臂3D打印機更加靈活,本項目設計了一款可伸縮的打印機框架結構。其特點在于三角支撐架的橫向及縱向皆可通過調節伸縮,這樣的設計使其在使用過程中適應性更強、更方便攜帶。
圖1所示的是縮小到最小狀態的三角結構框架。可伸縮式機架為角件和伸縮桿構成的框架結構,角件包括三個上支撐角件和三個下支撐角件,三條伸縮桿呈三角形平行排列,每條伸縮桿的上下兩端分別與一個上支撐角件和一個下支撐角件固定連接,三個上支撐角件通過三條伸縮桿相連,構成三角形結構,作為可伸縮式機架的頂部,三個下支撐角件通過三條伸縮桿相連,構成三角形結構,作為可伸縮式機架的底部。伸縮桿包括支撐桿套、支撐桿、直線軸承和軸承座,支撐桿套的一端固定在角件上,另一端通過直線軸承和軸承座與支撐桿的一端連接,支撐桿的另一端固定在另一角件上,軸承座上還設有鎖緊螺釘座,鎖緊螺釘座上設有鎖緊螺釘,鎖緊螺釘用于鎖緊伸縮桿,固定其長度。
支撐桿分別通過直線軸承伸入到對應的支撐桿套中,支撐桿是活動件,當支撐桿伸長或縮短時,通過設置在鎖緊螺釘座上的鎖緊螺釘進行鎖緊,使上方三根桿固定不動,形成首尾相接的三角形。下方結構相同,上下一致動作,便可實現水平方向上的伸縮。垂直方向上的伸縮原理相同。
三角支撐架機構中的支撐桿套、角件是采用鑄鋁銑削加工而成的,利用鑄鋁為材料不僅能夠滿足三角架本身的剛度要求,而且這種材料質量輕,大大減小了打印機的重量。支撐桿采用45鋼鍍鉻而成,支撐桿直徑不大,采用45鋼鍍鉻保證了支撐桿的剛性,延長了它的使用壽命。承座與鎖緊螺釘座采用鋁件加工而成,表面做噴砂處理。
4 功能組件2——便攜部件設計
設計便攜式機構時,充分考慮到了方便、快捷、節省的設計理念,在原有的、已完成的機構框架上想出路,既保證了機構原來的工作性能,又完善了機械結構的整體的功能,同時又不影響其美觀。
由平臺組件的組成看,原平臺組件在打印機機構中主要有兩大作用:一是提供打印平臺打印相關零件,打印平臺置于加熱平臺之上,為加工零件提供依托平臺;二是內設調平螺絲,通過調平螺絲連接打印平臺與三角伸縮支架機構的同時,也通過調平螺絲對打印平臺進行調平,以確保打印精度。現在加熱平臺的底部安裝一個便攜把手,增加了一項便攜的功能。通過對平臺組件的開發利用不僅使其只作為打印零件的依托,更使它作為整個框架構件的紐帶,成為便攜把手的有利依托。當整個機構縮到最小時,將機構倒置,這樣其整體就是一個可提攜的三角箱體,這樣的設計更符合人體舒適度的要求,方便攜帶。
在材料的選擇上也充分考慮到材料與加工零件材料的相適應性,由此加熱平臺采用3mm厚的三角形鋁基板制成;打印平臺采用高硼玻璃制成,耐高溫、耐腐蝕,性能穩定,在此平臺上打印零件方便摘取。
5 結語
并聯臂式3D打印機的打印速度要比普通XYZ三軸3D打印機快很多,且成本可降低20%左右。可以打印的產品目前以日常生活用品為主,比如塑料水杯、盒子等以及文化創意物品、外形復雜美觀的裝飾品。本文主要針對并聯臂式3D打印機的機械結構進行設計和優化,重點對送料機構與支撐構件進行了研究與優化,使該機構達到了更高的打印精度和速度,具有一定的運用前景。
未來并聯臂式3D打印機研究方向主要有以下四個方面:(1)并聯臂式3D打印機綜合檢測系統的研究,包括位置、速度等;(2)并聯臂式3D打印機工作空間和靈活度的分析;(3)多自由度并聯臂式3D打印機的設計與研究;(4)提高并聯臂式3D打印機運動過程的精度及其抗干擾能力。
通過對并聯臂式3D打印機的優化與設計,項目組同學學會了使用UG軟件進行曲面建模,學會使用UG進行機構的運動仿真以及有限元分析,并且進一步明確了未來的研究方向。在學到知識的同時,還學到如何合理地利用時間,如何合理地進行人力資源分配。我們要勇于探索高端,不能滿足于現狀。
參考文獻
[1] 劉辛軍,汪勁松,高峰,等.并聯機器人機構新構型 設計的探討[J].中國機械工程,2001,(12).
[2] 劉禹,李志江.3D技術、3D打印的中文定名[J].中國 科技術語,2013,15(4).
[3] 康曉娟.Delta并聯機器人的發展及其在食品工業上的 應用[J].食品與機械,2014,(5).
[4] 李不言,管雯珺.3D打印設備發展現狀[J].中國印 刷,2013,(8).
作者簡介:張小建(1994-),江蘇南通人,南京工程學院學生,研究方向:機械制造及自動化。
(責任編輯:黃銀芳)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
