單片空間后方交會內部可靠性研究
2016-12-26 03:10:26吳磊
地理空間信息 2016年2期
關鍵詞:實驗
吳 磊
(1.廣東省國土資源測繪院,廣東 廣州 510500)
單片空間后方交會內部可靠性研究
吳 磊1
(1.廣東省國土資源測繪院,廣東 廣州 510500)

根據Baarda的可靠性理論,以空間后方交會為實驗模型,在平差過程中引入虛擬控制點和控制點整體平差,并運用數據探測法進行單個粗差探測。實驗表明,加入虛擬控制點,能適當提高每個觀測值上的多余觀測分量,減小控制點上粗差可發現的下界值。使用Baarda數據探測法檢測粗差更有效,提高了該平差系統的內部可靠性。當網形結構不好、多余觀測分量過少時,這種方法還能探測到數據探測法不能探測到的粗差。
空間后方交會;數據探測法;內部可靠性;粗差探測
由于各種因素的影響,觀測值中常帶有一定數量的粗差,如果對數據直接處理,會損壞參數估計的精度。因此,平差中需要探測粗差并排除或減弱粗差對數據處理的危害[1]。荷蘭Baarda教授在1967年首先提出了平差系統的可靠性理論,并導出了數據探測法[2];陶本藻在相關權陣基礎上,從方差比檢驗出發,構建了一種新的數據探測法[3];陶本藻、施闖等針對相關觀測的粗差探測,提出了一種基于相關分析的粗差理論,為多維相關觀測粗差的檢測開辟了一條新途徑[4,5];於宗儔直接從最小二乘平差系統中的觀測誤差與殘差的關系出發,提出了多個粗差同時定位定值的方法[6]。
Baarda提出的測量平差系統中的單個模型誤差的可靠性理論已在大地測量、攝影測量、工程測量及變形觀測中得到廣泛的應用,而從單個模型誤差到多個模型誤差,從單一備選假設到2個備選假設的發展,由于研究較為復雜,目前尚未得到廣泛的應用[7]。本文遵循Baarda的可靠性理論與數據探測基本思想,以航空攝影測量空間后方交會為實驗模型,從觀測值的單個粗差出發,提出了一種外方位元素的求解方案。
1 基于虛擬觀測的空間后方交會平差模型
1.1 虛擬控制點的提出
一個平差系統的圖形結構設計好后,在一定的觀測精度下,給定顯著性水平σ0和檢驗功效β0,則系統發現每個點上粗差的下界是確定的。在航空及航天攝影測量中,由于航高及控制點分布的原因,導致圖形結構可能很壞,圖形結構的直接反映就是誤差設計矩陣A,如果能改善圖形結構,就可能增強系統的可靠性。本文提出了通過布設虛擬點,改善圖形結構,然后和地面控制點整體平差,并人為對控制點引入粗差,使用數據探測法檢測。
1.2 虛擬控制點的模擬及平差過程
通過最小二乘平差迭代求得的外方位元素值、隨機生成的像點坐標(xv,yv)以及給定的虛擬點深度范圍(Zmin,Zmax),利用共線方程可以生成虛擬點(Xv,Yv),此時每個虛擬點的像點坐標(xv,yv)及三維坐標(Xv,Yv,Zv)都已知,把虛擬點當作觀測值和控制點一起參與下次平差。每一次迭代后通過新的外方位元素生成虛擬點(Xv,Yv),再次平差解算,如此循環,直到收斂輸出。未知參數估計的概略流程圖如圖1。
1.3 函數模型
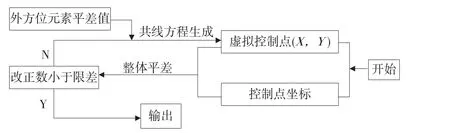
圖1 平差流程圖
帶虛擬控制點的后方交會誤差方程為:

式中,pc、pv分別為控制點和虛擬控制點的權。
由于虛擬控制點的(Xv,Yv)是在迭代過程中根據外方位元素最新解算值不斷更新的:

當虛擬點參與下次平差逐點組成誤差方程并法化時,可計算出lv:
其中,
因此可知:
誤差方程式(1)可變為:

此時方程的解為:

與嚴格的最小二乘間接平差模型解相比,N陣多了一項:AvTPvAv。若虛擬控制點也是真實控制點,此時外方位元素的最小二乘解為:
1.4 參數的精度評定與數據探測

當lv≠0,即使用式(7)計算X時,QVV陣有如下形式:
當lv=0時,顧及式(5)與式(6),根據協因數傳播定律,可以得到:



其中,
當觀測值只存在一個粗差時,構建標準殘差統計量,使用數據探測法對其檢驗:

其中,

式中,r=2n-6;n為控制點和虛擬控制點總個數。
給定閾值Ka,當ωi≥Ka,則認為該觀測值可能含有粗差。平差時計算出每個控制點上的統計量ωi,再根據給定閾值進行粗差檢測,文中給定Ka=3.29。
1.5 可靠性指標[1]
在一個平差系統中,對于單個備選假設下的可靠性,設模型誤差為單個觀測值上的粗差,給定顯著性水平α0和檢驗功效β0,可得到一個粗差被發現的下界值:

式中,ri=(QVVPll)ii,為第i個觀測值的多余觀測分量;δ0為非中心化參數;σli為第i個觀測值的中誤差。
文中還將用到可控性數值:

1.6 實際平差解算方法與過程
平差時,外方位元素的估計值嚴格上應使用式 (6)算出,此時觀測值殘差V與測量誤差l間關系式V=- (QvvPll)l不再成立;若使用式(7)計算,平差的幾何條件QvvPll反映了觀測值誤差對改正數的作用程度。由于該矩陣為冪等矩陣,具有一系列性質,從中可以直接得到每個觀測值的多余觀測分量。如果使用式(6)計算,Qvv則具有式(10)的形式,此時QvvPll矩陣顯然不是冪等矩陣,其對角線元素不再反映多余觀測分量。為了方便分析問題,文中可靠性指標多余觀測分量、可控性數值、粗差探測下限中改正數向量的協方差陣Qvv使用式(8)計算,此時理解為把生成的虛擬控制點加入很小的正態隨機誤差,這樣lv便不再為0,求出的QvvPll為冪等矩陣,對角線元素反映了多余觀測分量。而使用Baarda數據探測法進行粗差探測時,標準化殘差統計量ωi按照式(12)構建,其中改正數向量的協方差陣QVV按式(10)計算。
2 算 例
2.1 實驗數據說明
選用某地區航空區域網內的一張航片為實驗數據,航片的外方位元素由光束法區域網平差求得,由于一張航片覆蓋范圍內不可能有大量控制點,因此在本文實驗中,把相片覆蓋范圍內的加密點當作控制點使用。選用了相片近似標準點位的9個加密點,從而可以反解得6個外方位元素。相機為框幅式相機;幅面大小為108.000 mm×72.000 mm;像素大小為0.009 mm。
平差過程中參數說明如下:
1)外方位角元素光束法平差值為:φ=1.286 5°,ω=1.060 2°,κ=-5.547 8°,在有無虛擬控制點2種情況下的初始角元素值都取為:φ=0°,ω=0°,κ=0°。
2)進行了6點法和9點法2組實驗解求外方位元素;實驗中分別模擬6個和9個虛擬控制點:像點坐標(xv,yv)在像平面內隨機生成,高程Zv在(Z0-100 m,Z0-100 m)中隨機生成,其中Z0為相片覆蓋區內的平均高程,然后按式(2)計算出虛擬控制點的物方平面坐標(Xv,Yv),進而可與控制點一起平差計算。
3)平差過程迭代結束條件設置為3個角元素改正數都小于0.03'。
2.2 使用9個控制點進行實驗
1)首先測試純控制點解外方位元素,按公式(14)、(15)及ri=(QVVPll)ii分別計算每個點上的粗差發現下限、可控性數值、多余觀測分量,結果如表1(單位權中誤差為0.003 9 mm,迭代次數為3)。
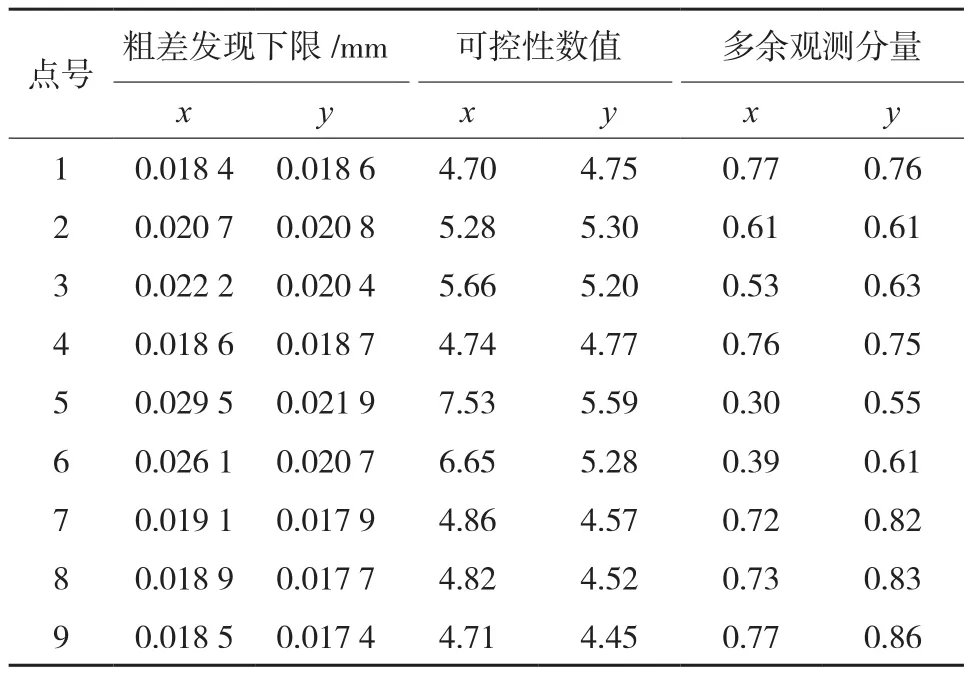
表1 無虛擬點時每個點位上可靠性指標
2)引入9個虛擬控制點整體平差解求,進行了20次實驗,每次虛擬點的像平面坐標及Z坐標隨機生成,因此每次虛擬點3個坐標都不同,平差的網形也不同。計算中控制點、虛擬控制點權分別設置為Pc=1,Pv=1/10,可靠性指標的統計結果如表2(平均單位權中誤差為0.002 5 mm,平均迭代次數為3.3)。
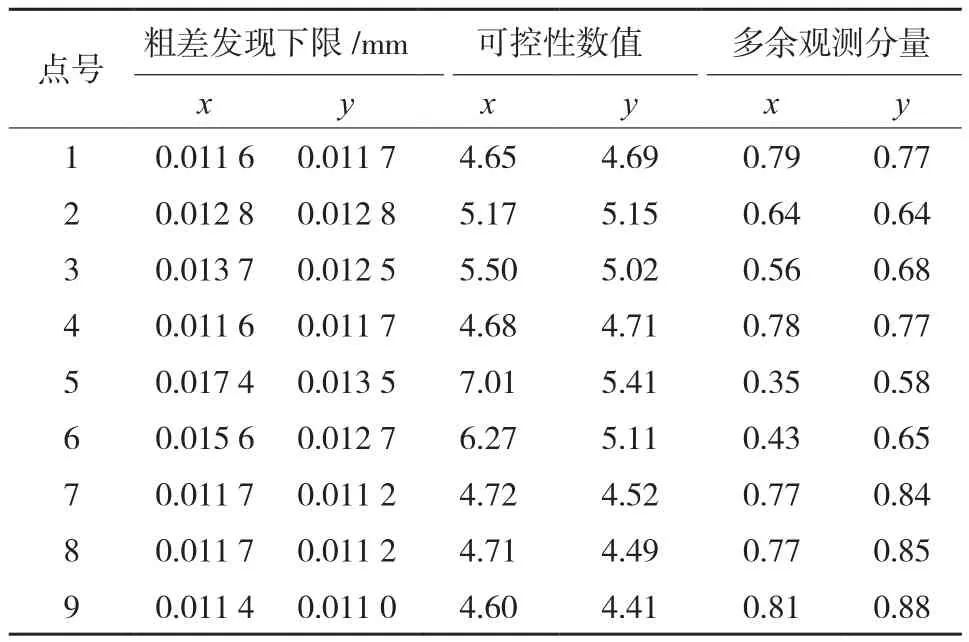
表2 加入虛擬點后每個點位上可靠性指標
3)在純控制點解算未知數情況下,將確定大小的粗差C,分18次加入到9個點共18個坐標觀測值中,即第1次對第1個點的x加入粗差后解算,第2次對第1個點的y加入粗差,第3次對第2個點的x加入粗差,以此類推,直至第18次對第9個點的y加入粗差,保證每次觀測值中只有一個粗差,在解算過程中使用數據探測法進行粗差探測。表3為引入0.04 mm(4.5個像素)粗差所統計的標準化殘差。
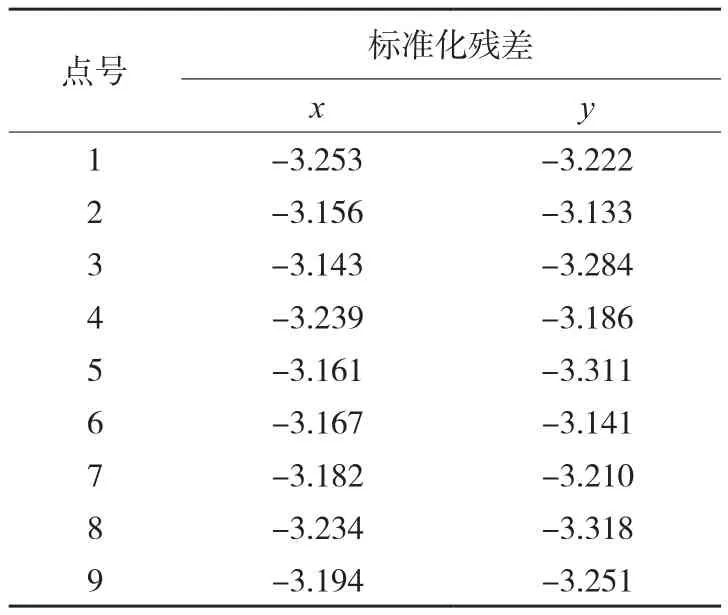
表3 無虛擬控制點的標準化殘差
4)在同時使用虛擬控制點和控制點求解的情況下,同樣對9個控制點的xi、yi分18次加入一定大小的粗差。表4是在2種求解方式下,加入不同大小的粗差,能檢測到粗差的次數,表5為引入0.04 mm粗差(4.5個像素)所統計的標準化殘差。
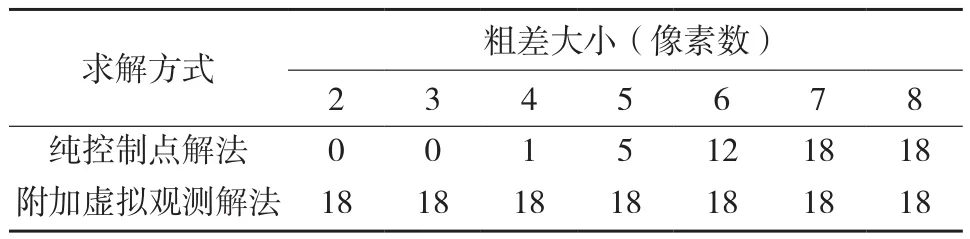
表4 粗差探測統計表
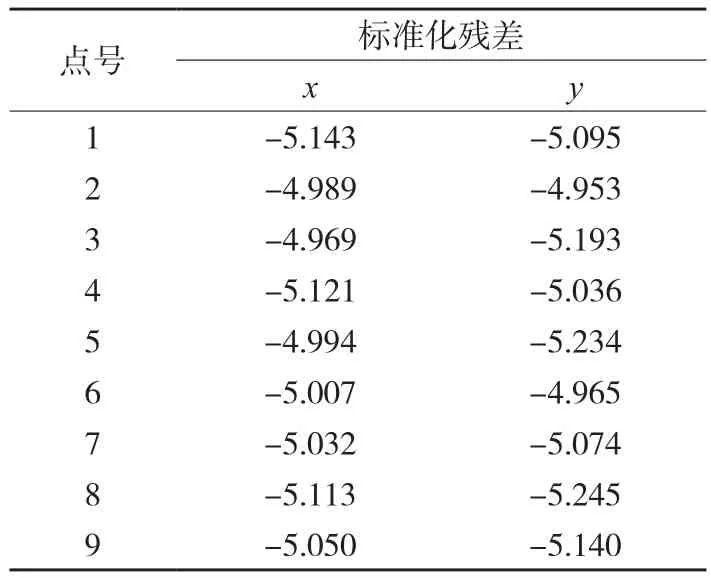
表5 有虛擬控制點的標準化殘差
從表1~5可以看出:
1)給定顯著行水平σ0和校驗功效β0,實驗中σ0=0.1%,β0=80%,非中心化參數δ0=4.13。加入虛擬控制點后,每個控制點的多余觀測分量適量增加,可控性數值降低,粗差檢測的下限降低。
2)令標準化殘差的閾值為Ka=3.29,對于一定大小的粗差(本次實驗中為2~6個像素粗差),加入虛擬控制點后的檢測效率明顯好于只使用控制點。2.3 使用6個控制點進行實驗
如果只使用地面控制點平差,單位權中誤差為0.002 6 mm,迭代次數為3,進行20次隨機模擬虛擬控制點,每次模擬6個,和地面控制點整體平差,平均單位權中誤差為0.001 5 mm,平均迭代次數為3.58次。具體的可靠性指標統計見表6、表7。

表6 無虛擬點時每個點位上可靠性指標
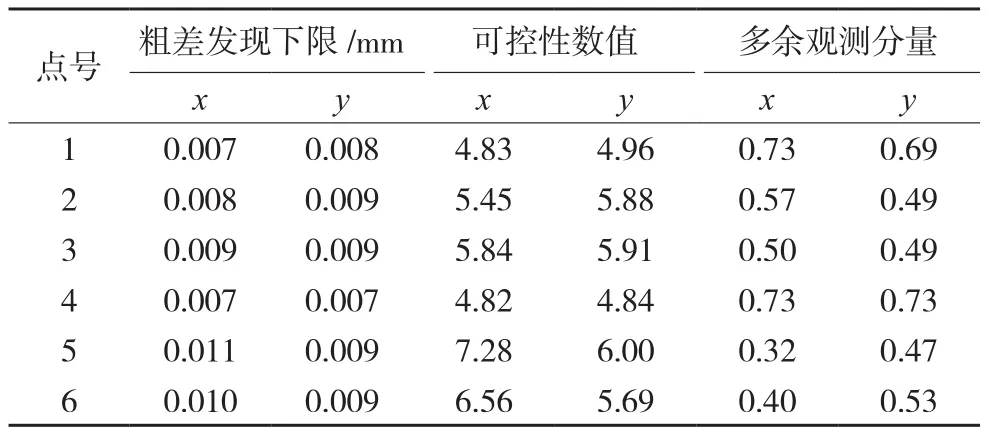
表7 加入虛擬點后每個點位上可靠性指標
對于不加虛擬控制點的情況,每次對每個點的x或y坐標加入0.9 mm(100個像素)的粗差,統計結果如表8;加入虛擬控制點后,加入0.09 mm(10個像素)的粗差,統計結果如表9。
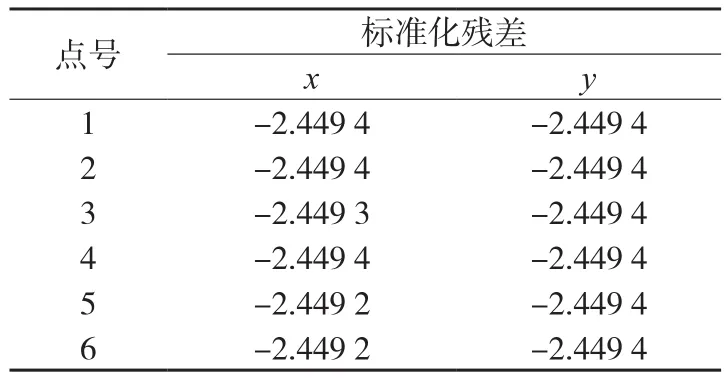
表8 無虛擬控制點的標準化殘差

表9 有虛擬控制點的標準化殘差
由以上結果可知:
1)在一定的圖形條件和觀測精度下,多余觀測過少,使用數據探測法探測粗差是失效的;
2)加入虛擬控制點后,雖然每個點上的多余觀測分量無明顯增加,但使得粗差可以探測,同時也說明了Baarda的可靠性理論與數據探測并不是統一的[2]。
6點法、9點法點位分布圖分別如圖2、圖3所示。
圖2 6點法點位分布圖
圖3 9點法點位分布圖
3 結 語
在已設計好的網形中,對模型誤差只存在粗差的情況,粗差的可發現下界是確定的。如果在平差過程中加入虛擬控制點,降低了粗差可發現下界閾,提高了數據探測法效率,并在一定條件下探測出使用數據探測法不可探測的粗差,提高了后方交會的內部可靠性。
[1] Pelzer H. Some Criteria for the Accuracy and Reliability of Networks[J]. DGK,1980,25(2):55-67
[2] Baarda W. A Testing Procedure for Use in Geodesy Net Works [J].Neth. Geod. Publ. on Geodesy,1968 ,2(5):23-31
[3] 陶本藻,姚宜斌.可靠性分析與數據探測[J].武漢大學學報:信息科學版,2002,27(6):607-609
[4] 陶本藻,姚宜斌,施闖.基于相關分析的粗差可區分性[J].武漢大學學報:信息科學版,2004,29(10):881-883
[5] 施闖,劉經南.基于相關分析的粗差理論[J].武漢測繪科技大學學報,1998,23(1):5-9
[6] 於宗儔,李明峰.多維粗差的同時定位與定值[J].武漢測繪科技大學學報,1996,21(4):323-329
[7] 李德仁,袁修孝.誤差處理與可靠性理論[M].武漢:武漢大學出版社,2005
P207
B
1672-4623(2016)02-0088-04
10.3969/j.issn.1672-4623.2016.02.030
吳磊,工程師,研究方向為航空攝影測量與遙感影像處理。
2015-04-03。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55