基于多算法的永磁同步電機伺服控制系統
2016-12-23 02:59:05李志宏吳連順李玉萍錢晨亮
制造業自動化 2016年7期
關鍵詞:卡爾曼濾波
李志宏,吳連順,李玉萍,錢晨亮,劉 杰
(1.武漢理工大學 自動化學院,武漢 430070;2.武漢船用機械有限公司,武漢 430084)
基于多算法的永磁同步電機伺服控制系統
李志宏1,吳連順1,李玉萍1,錢晨亮1,劉 杰2
(1.武漢理工大學 自動化學院,武漢 430070;2.武漢船用機械有限公司,武漢 430084)
為了提高伺服控制系統的動態性、魯棒性以及良好的跟蹤性能,以永磁同步電機數學模型為基礎提出了滑模變控制與卡爾曼觀測器相結合的控制方案。在伺服控制系統中,位置環采用滑模變結構控制,速度環主回路采用PID控制,其反饋回路中使用卡爾曼觀測器的控制策略,而電流環采用PI控制。在MATLAB/Simulink環境中,對多種控制算法相結合的控制系統進行仿真,證明了此方案的有效性,即電機在各種擾動及不確定因素情況下仍具有較強的適應性和魯棒性,發揮了良好的的動態特性。
永磁同步電動機;滑模變結構;卡爾曼觀測器;MATLAB/Simulink
0 引言
永磁同步電機以結構簡單、效率高、力矩大以及高控制精度等優良品質被廣泛應用于伺服控制領域。高品質的伺服控制系統需要在各種外界干擾的情況下達到穩定轉速、精確的位置跟蹤,而單純的PID控制已經不能滿足這一需求。文獻[1]提出了基于自抗擾控制的伺服系統,該策略不依賴被控對象模型,而是通過補償擾動來獲得良好的性能,同時它也適用于非線性系統。文獻[2]提出了基于模糊RBF神經網絡的伺服系統,該方法通過在線學習進行調整參數,使系統保持良好的控制效果,但是控制算法復雜。文獻[3]提出了基于抗差擴展卡爾曼濾波器的電機轉速估計,該方法減小了粗差對估計值狀態的影響,能準確地估計轉速。文獻[4]提出了基于卡爾曼濾波器的電機轉速精確控制,該方法算法簡單,計算量小,效果很好,適用于低速環境。文獻[5]提出了基于指數趨近律的滑模變控制結構,該方法能夠減小外界干擾以及參數變化對系統的影響,指數趨近律削弱了滑模切換造成的高頻抖振。在前人的研究基礎上,本文提出了基于多算法相結合的控制策略,卡爾曼濾波器精確估計電機轉速,滑模變結構按系統需求設計實現位置環的快速平滑跟蹤。仿真表明了該伺服系統滿足較高的性能要求。
1 永磁同步電機數學模型
由于永磁同步電機是一個復雜的系統,為了方便地對它進行分析和求解,在允許誤差的范圍內,通常利用3s/2r變換將三相靜止坐標系變換到兩相旋轉坐標系中。本文采用id=0的矢量控制方式,可以得到在d、q坐標系上永磁同步電機的解耦狀態方程[6]:

式中,R為電機繞組等效電阻;Lq為等效q軸電感;np為極對數;w為轉子角速度;Ψr為轉子等效磁鏈;TL為負載轉矩;iq為q軸電流;J為轉動慣量。
此系統采用典型的三環控制,在各個控制環上施以不同的控制策略,從而使控制系統的性能得到優化。永磁同步電機矢量控制總體框圖如圖1所示,主要包括:位置滑模變模塊、轉速PID調節模塊、電流PI調節模塊、卡爾曼濾波模塊、SVPWM發生器模塊、電壓逆變器模塊以及電機本體模塊。
2 控制器設計
2.1卡爾曼濾波器設計
卡爾曼濾波器是一種用于時變線性系統的遞歸濾波器。它以最小均方誤差為最佳估計的原則,建立信號與噪聲的狀態空間模型。
設離散卡爾曼濾波的線性差分方程及測量方程如下[7]:
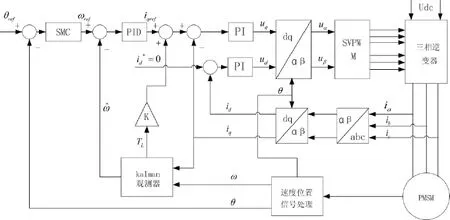
圖1 PMSM矢量控制結構圖

其中xk代表狀態變量;zk代表觀測變量;uk代表控制變量;變量wk和vk分別代表過程噪音和測量噪音,假設兩者都是均值為零的高斯白噪聲,且不相關。
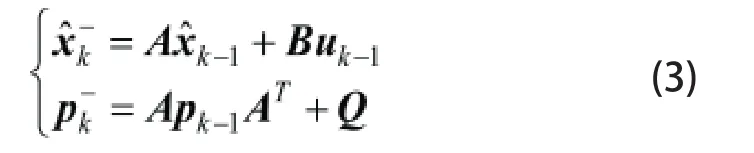
卡爾曼濾波器分成兩個過程:時間更新方程和測量更新方程。時間更新方程負責及時向前推算當前狀態變量和誤差協方差估計的值,稱為先驗估計。測量更新方程是將預先的估計值和實時測量值結合起來得出最優估計值,稱為后驗估計。
時間更新方程:
測量更新方程:
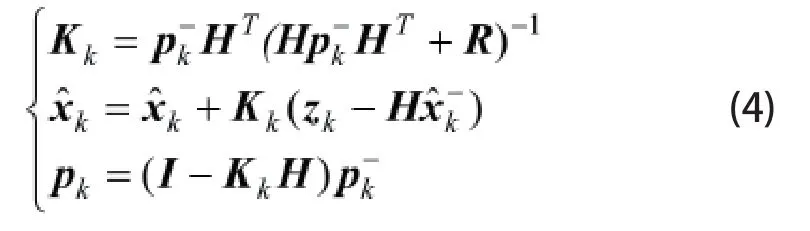
其中Kk為卡爾曼增益;R為測量噪聲協方差矩陣。
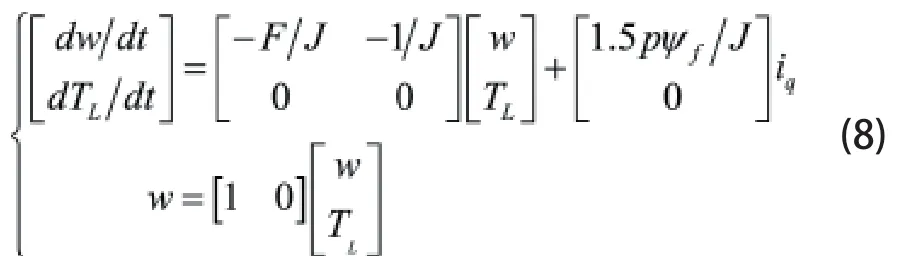
已知永磁同步電機機械方程:

對于隱極式結構的電機而言,則電磁轉矩為:

假設在恒轉矩模式下運行,可以得出:

由式(5)~式(8)可以得到永磁同步電機連續系統的狀態方程以及測量方程:
通常計算機在處理信號系統時,觀測值是離散的。在滿足離散化的基礎上,得到離散狀態方程表達式:

結合上述推倒公式可知,只要給出系統的初始值x(0)和初始誤差p(0),選擇適當的矩陣Q、R,將永磁同步電機的實驗參數代入方程中,經過多次的迭代計算,可以得到矯正的卡爾曼濾波增益值Kk,再根據此時刻的測量值y(k),可計算出最優估計狀態x(k)。
2.2位置滑模變結構的設計
滑動模態變結構是一種高速切換的反饋控制系統,通過控制量的切換迫使系統狀態在一定特征下沿著滑模面滑動,運動軌跡呈現小幅度、高頻率的上下反復運動。這種滑動模態是可以設計的,且與系統的參數及擾動無關[8]。由于滑模變結構調節器的設計對系統模型精度要求不是很高,在設計最外環的位置環時,將速度閉環(包含電流環)系統近似等效為一階慣性環節,以此為基礎設計出位置環滑模變結構控制器。
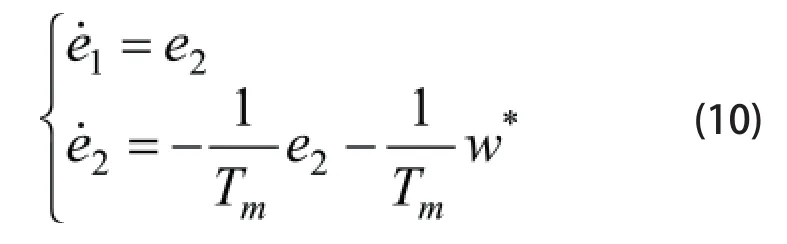
根據上述狀態方程將其離散化,則離散系統狀態方程:

選取位置環滑模切換函數為:

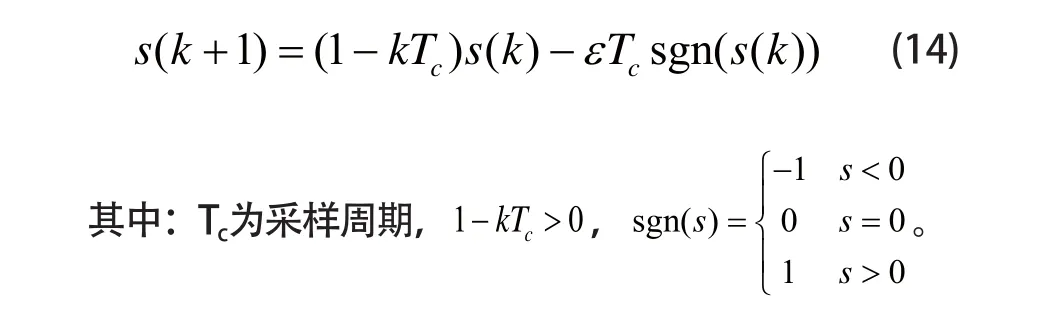
滑模變一般指數趨近律表達式為:

從而推導出離散指數趨近律:
由式(12)、式(15)結合可得:

假設滑模變結構可控條件CB≠0成立,可以得出滑模控制率為:

為了能夠有效地消除離散滑模控制的抖振,采用帶有邊界層厚度的飽和函數sat(s)來替代理想滑模中的符號函數sgn(s):
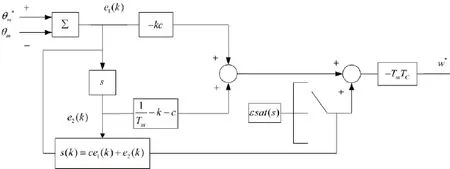
圖2 位置環滑模結構控制器的結構圖
將已知矩陣A、B、C帶入式(16)得出:

根據上述公式推導,位置環滑模變結構框圖如圖2所示。
3 實驗仿真
仿真中永磁同步電機的主要參數如下:定子繞組電阻Rs=2.875Ω,電樞電感L=Ld=Lq=8.5mH,轉子磁鏈Ψr=0.1688Wb,轉動慣量J=0.0008kg/m2,極對數p=4。
在卡爾曼濾波觀測器中,采樣周期T1為0.1ms,狀態變量初始值x0=[1 1],濾波協方差初始值,R=0.001。
在位置滑模變結構中,采樣周期Tc為0.5ms,c=20,k=15,ε=5。
在仿真實驗中,先斷開位置環,電機給定速度為1500r/min,0~0.15s時負載轉矩為5N?m,在0.15s時刻突加負載至20N?m。由圖3和圖4比較可知,當負載轉矩發生突變時,未加卡爾曼模塊的電機速度下降幅度大,恢復到穩定轉速時間長,而加卡爾曼模塊的速度明顯下降幅度較小,恢復穩定轉速時間短。因此可以看出卡爾曼觀測器通過轉矩負載正反饋補償穩定了轉速,大幅度提高了電機的抗負載突變能力。由圖5和圖6比較,同時結合上述公式(6),可以得知通過觀測補償機制大大提高了電流環中q軸反應時間和幅值,迅速彌補了負載轉矩波動帶來的影響。
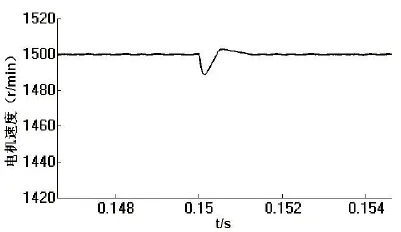
圖3 未加卡爾曼觀測器的電機轉速波形
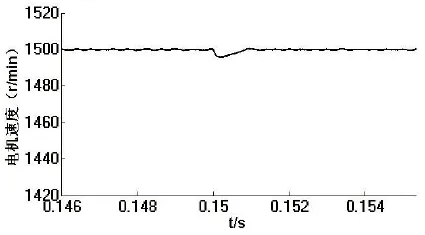
圖4 加卡爾曼觀測器的電機轉速波形
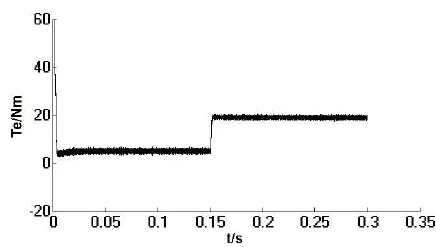
圖5 未帶卡爾曼的電磁轉矩波形
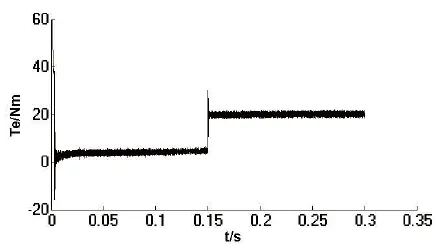
圖6 帶卡爾曼的電磁轉矩波形
后斷開速度環,分別加上位置PID控制以及滑模變結構,構成完整的三環伺服控制系統,其中電機位置給定為8rad,負載轉矩給定為5N?m,仿真時間為0.5s。由圖7和圖8比較可知,PID控制實現的位置追蹤出現超調現象,而滑模控制可以實現位置信號的準確跟蹤,并且快速、無超調,使整個系統具有較高的跟蹤精度和較好的動態性能。
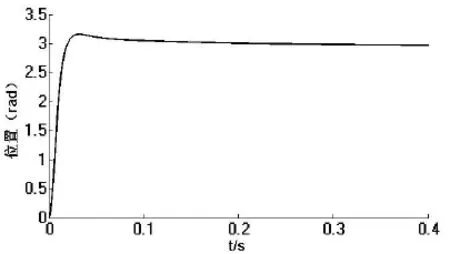
圖7 PID控制位置追蹤波形

圖8 滑模變控制位置追蹤波形
4 結束語
針對永磁同步電機伺服系統的控制,本文給出了多算法控制的設計方案并進行了MATLAB/Simulink仿真。仿真結果表明,在外界干擾情況下,將卡爾曼濾波器應用到速度環,有效地穩定了轉速,提高了抗負載突變能力;將滑模變結構應用到位置環,實現了位置的快速跟蹤同時提高了跟蹤精度。二者的有效結合,使系統具有很強的魯棒性,同時發揮出良好的動態性能。
[1] 孫凱,許鎮琳,蓋廓,等.基于自抗擾控制器的永磁同步電機位置伺服系統[J].中國電機工程學報,2007,27(15):43-46.
[2] 邵明玲,于海生.基于模糊RBF神經網絡的永磁同步電機位置控制[J].青島大學學報(工程技術版),2014,29(4):27-31.
[3] 尹忠剛,張瑞峰,鐘彥儒,等.基于抗差擴展卡爾曼濾波 器的永磁同步電機轉速估計策略[J].控制理論與應用,2012,29(7):921-927.
[4] 章瑋,姚衛忠,梁文毅.基于卡爾曼濾波器的永磁同步電動機轉速精確控制[J].微電機,2008,41(1):4-6.
[5] 黃飛.永磁同步電機位置伺服控制的滑模控制[J].重慶交通大學學報(自然科學版),2011,30(4):860-863.
[6] 李華德,李擎,白晶.電力拖動自動控制系統[M].北京:機械工業出版社,2008.9.
[7] 洪乃剛,等.電力電子和電力拖動控制系統的MATLAB仿真[M].北京機械工業出版社,2006
[8] Welch G,Bishop G.Introduction to the Kalman Filter [D].Chapel Hill:Department of Computer Science University of North Carolina,2006:2-6.
Permanent magnet synchronous motor servo control system based on multi-algorithms
LI Zhi-hong1, WU Lian-shun1, LI Yu-ping1, QIAN Chen-liang1, LIU Jie2
TP273
A
1009-0134(2016)07-0025-05
2016-04-05
李志宏(1970 -),男,副教授,本科,主要從事船舶自動化研究等。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36