超聲測距溫濕度補償算法的研究及STM32實現
2016-12-21 07:46:43張喜紅王玉香
海南熱帶海洋學院學報 2016年2期
關鍵詞:測量
張喜紅,王玉香
(1.亳州職業技術學院,安徽 亳州 236800;2.山東大學 控制科學與工程學院,濟南250061)
?
超聲測距溫濕度補償算法的研究及STM32實現
張喜紅1,2,王玉香1
(1.亳州職業技術學院,安徽 亳州 236800;2.山東大學 控制科學與工程學院,濟南250061)
為了降低超聲測距系統因溫、濕度差異帶來的誤差,在Matlab2010平臺下,運用BP神經網絡對標定的溫、濕度樣本及對應的超聲波速度進行融合訓練仿真實驗,并將設計的補償算法移植到STM32測距系統,測試其補償能力.經多次測距實驗表明,與現有方法相比,能有效補償溫、濕度變化引起的誤差,精度提高了1個數量級.
數據融合;神經網絡;超聲波
0 引 言
超聲測距因具有非接觸測量的優點,被廣泛用于各個測距領域,如汽車倒車雷達,機器人智能避障,盲人導航,物位測量等.測距的基本原理是超聲波反射測量,距離可表示為L=tv/2,其中v是超聲波在空氣介質中的傳播速度,t是從發出超聲到收到回波所用時間.上述情況是假定超聲波速度v不受環境影響的理想情況,然而在現實中,超聲波速度會因工作環境溫、濕度的變化而發生不規則性的改變.如果使用恒定的速度值進行距離計算,必然會產生較大的測量誤差.基于這一情況,眾多研究人員對測距結果的補償方法開展了大量的研究,到目前為止大多是基于擬合公式的方法對速度實現溫度補償,如文獻[1-2]所述.然而,在一些特殊測量環境中,濕度對測量結果的影響較大,不可忽視.基于上述現狀,本文在Matlab2010平臺下,基于BP神經網絡研究了溫、濕度誤差的補償,并在STM32上實現了本文方法的移植與測試.
1 平臺及方法理論
1.1 超聲測距實驗系統
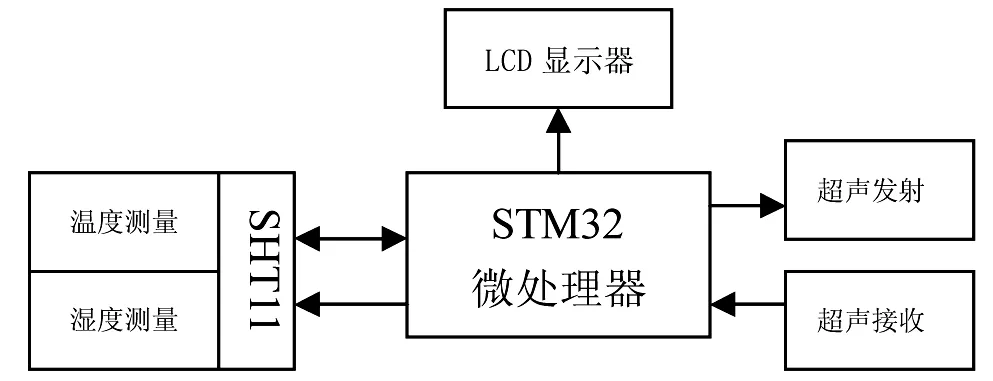
圖1 超聲測距系統框圖
為了開展實驗,獲取實驗樣本的溫、濕度數據,以及后續算法有效性的移植測驗,搭建了如圖1所示的超聲測距系統.其由STM32微處理器(型號為STM32F103CZET6)、LCD液晶顯示模塊、超聲發射模塊、超聲接收模塊,及溫、濕度測量模塊構成.超聲發射、接收模塊電路的具體實現原理及控制方法,參見文獻[3].溫、濕度測量模塊選取型號為SHT11的集成傳感器[4],其集溫、濕度測量于一體,直接輸出溫、濕度的測量值,且與外界采用典型的IIC總線進行數據通信,在一定程度上簡化了系統硬件電路設計.SHT11可測-40℃~120℃間的溫度,分辨能力高達0.01℃;可測0%~100%RH間的濕度,分辨能力高達0.03%RH.能夠很好的滿足超聲測距溫、濕度補償實驗的測定要求.
1.2 BP神經網絡
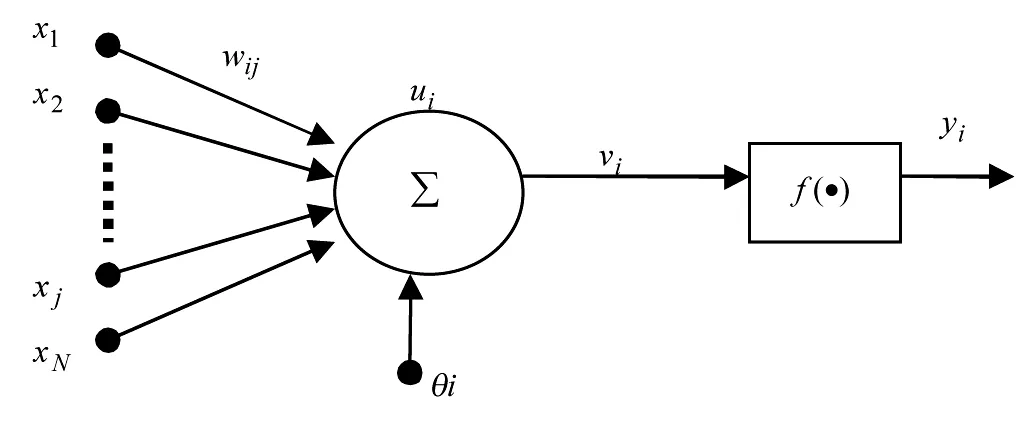
圖2 單層BP神經網絡示意圖
BP神經網絡[5],即反向傳播網絡.它仿照人腦神經元對外部刺激信號的響應過程,構造多層感知器,采用信號正向傳播和誤差反向調整的學習機理,經過數次迭代計算,成功地搭建出處理非線性信息的智能化網絡模型.其被廣泛用于數據融合、壓縮等多個領域[6-7].單層BP神經網絡如圖2所示,其中xj(j=1,2,…,N)為j維輸入信號,Wij為對應的連接權重;ui為各輸入信號與相應連接權重乘積的累加組合;θi為調節閾值;vi為經閾值調整后的值;f(·)為神經元的激勵函數.其數學表達如式(1)、(2)、(3)所示:
(1)
vj=uj+θj,
(2)
yi=f(vi).
(3)
2 BP神經網絡溫濕度補償算法
2.1 樣本標定
使用1.1 節所設計的超聲波測距系統,在空間相對較小的房間中裝有加濕器與空調設備對樣本數據進行標定.環境溫度的改變主要通過空調輔助實現,濕度的變化通過加濕器設備輔助實現.其中10攝氏度以下的樣本點在超市冷凍冰柜倉內所得,最終所標定的數據樣本如表1所示,其中v由文獻[1]中的公式v=331.5 +0.6 07T所求得,代表只含溫度補償的速度.vs是特定溫、濕度環境下對應的速度值,由1.1 節構建的測距系統在設定的距離L下,測出從超聲波發射到有超聲波返回所用的時間t,經vs=2L/t公式求解所得,最終測定結果為多次測量求均值所得.從表1分析可知,在相同的溫度環境,不同的濕度狀態下超聲波的速度值存在相對較大的差值,所以通過v=331.5 +0.6 07T擬合公式進行簡單的補償,在測距結果中將仍存在較大的誤差.
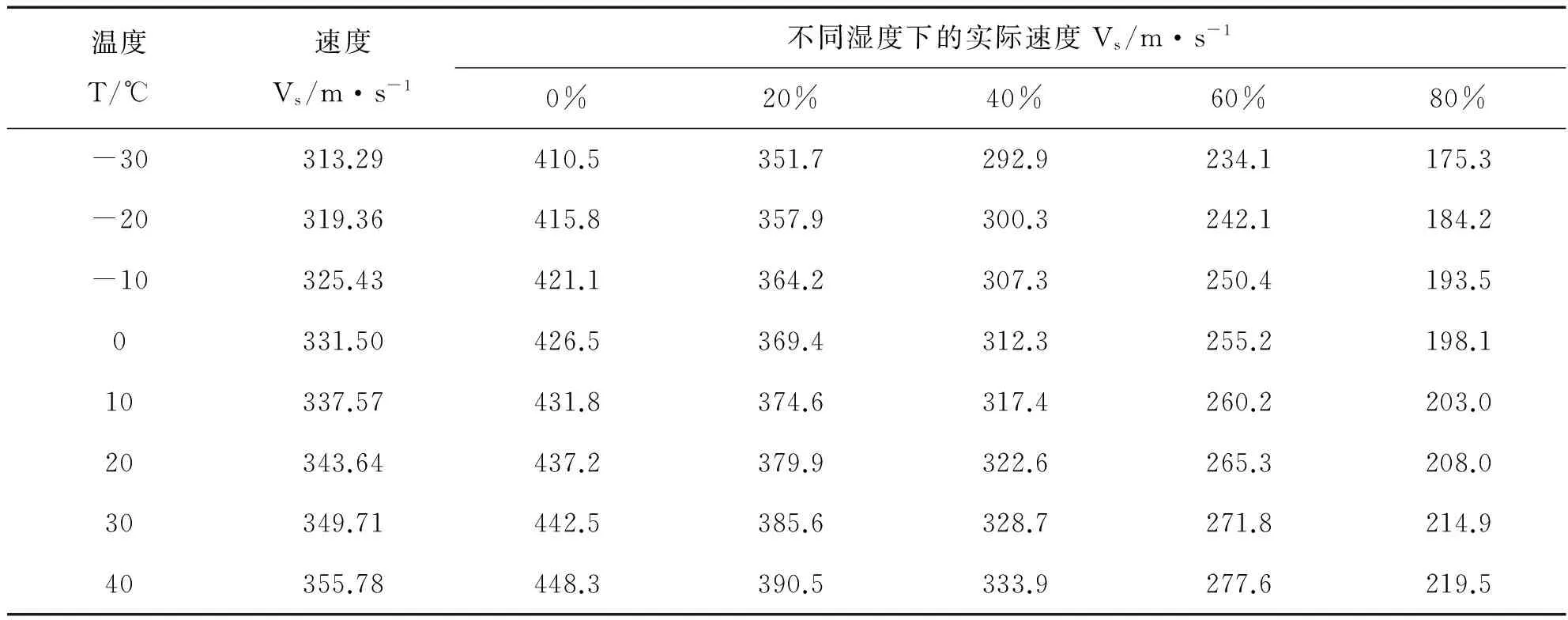
表1 超聲波速度標定樣本值
2.2 數據融合
由表1的數據分析可知,環境溫度、濕度與超聲波速度間存在非線性相關性.鑒于神經網絡在非線性映射關系擬合的優點,因此,將表1樣本數據中溫度與濕度值作為神經網絡的輸入,標定的超聲波速度值作為神經網絡的輸出,構建神經網絡,進行訓練挖掘速度與溫度、濕度之間的映射關系,將訓練好的映射關系用于速度偏差補償是可行的.在Matlab2010平臺下的具體流程如下:
①構造輸入輸出樣本數據矩陣;將表1中的數據按下式(4)格式進行存儲為矩陣Ti、Ri、Vsi分別對應溫度、濕度、超聲波速度值,總計i=40個樣本.抽取D中第1行與第2行數據為樣本點作為神經網絡訓練輸入樣本(即抽取T=-30℃~30℃之間的樣本為訓練集),將對應的Vs值作為訓練目標輸出樣本值.將T=40℃對應的樣本點作為測試樣本數據.
(4)

(5)

(6)
③創建網絡并進行訓練與測試;在Matlab2010平臺下分別通過newff()、train()、sim()三個函依次實現創建網絡、訓練網絡、測試網絡.將訓練誤差參數設為0.001,不斷調整網絡結構及其它訓練參數(如學習率、學習步長等),直到收到最好的測試效果.經過多次實驗,最終確立神經網絡模型如下圖3所示為2-6-1結構,即輸入層包含2個神經元,隱藏層包含6個神經元,輸出層為一個節點;輸入層→隱藏層→輸出層間的傳遞函數分別為:logsig、purelin.網絡訓練函數使用:trainlm.最終輸出的最值權值和閾值如下:
第一層的權值轉秩矩陣為:

第一層的閾值的轉秩矩陣為:
b′=[16.2 036 -1.8644 -10.0350 -0.6 967 -3.4 904 -2.9208];
第二層的閾值為:
b2=0.2 278.
2.3 算法的STM32實現
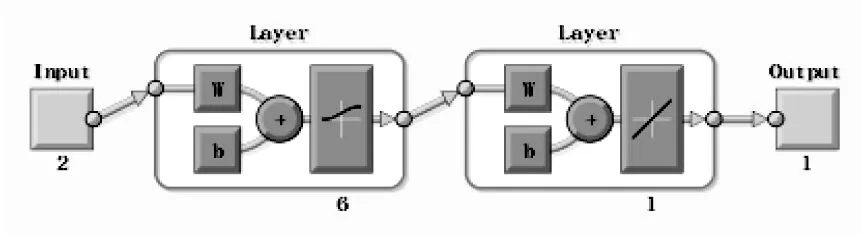
圖3 構建的網絡結構
由圖3所示的網絡結構可知網絡輸出的最終表達式如式(7)所示,也就是說對于某一歸一化后的溫、濕度樣本輸入對(x1,x2)而言,代入圖3所示網絡的輸出值為y,即為當前環境下超聲波速的歸一化值.將代入式(8)所示的歸一化的逆運算式,便可求解出當前環境下的超聲波速度Vs.其中logsig(·)函數的數學式如式(9)所示.
(7)
(8)
(9)
根據上述分析可知,基于STM32平臺下,用C語言編寫如下關鍵代碼,實現了超聲波速度的隨環境溫、濕度變化的實時校準.
#include
#define Vs_max 442.5 ;//速度最大值
#define Vs_min 175.3 ;//速度最小值
long double B1_TH[6]={ 16.2 036,-1.8644,-10.0350,-0.6 967,-3.4 904,-2.9208 };//第一層的閾值
long double B2_TH= 0.2 278;//第二層的閾值
long double w_x1[6]={ -7.0707,-1.7725,6.8314,9.5 295,-10.8993,11.6 864};//溫度權值
long double w_x2[6]={ -11.8215, 13.5 721,12.2 470, -9.5 793,7.8985, 6.6 588};//濕度權值
//求神經網絡輸入權值、閾值加權累加和
long double net_sum(long double x1; long double x2;)
{ u8 i; long double net_sum; for(i=0;i<6;i++) { net_sum=+(( w_x1[i]*x1+ B1_TH[i])+ ( w_x2[i]*x1+ B1_TH[i])); } return net_sum;
}
//logsig(·)函數的實現
long double logsig(long double x)
{
long double y;
y=1/(1+exp(x));//exp()為庫中的求取冪函數
return y;
}
//求當前環境下的超聲波速度Vs
Vs=((logsig(sum)+ B2_TH)-0.05)*( Vs_max- Vs_min)/0.9+ Vs_min.
3 實驗結果與分析
在keil4.0環境下,先后將常用的溫度擬合公式補償測距程序與本文算法設計的測距程序編譯后,燒錄到1.1 小節所設計的STM32測距儀中,在不同溫、濕度環境下進行測試對比.如表2所示,給出了測距標定值為5 m,溫度T=25℃(偏差小于±1℃),濕度RH分別為0%~80%的測距對比結果(濕度偏差小于±1%).從結果來看,溫度擬合公式補償方法在相同溫度下,當濕度增加時誤差顯著增大,而BP網絡融合補償方法誤差幅度變化不是很明顯.溫度擬合公式補償方法,最小誤差為:0.098 m;最大誤差可達:0.2 91 m;誤差數量級達10-2.BP網絡融合補償的最小誤差為:0.001;最大誤差為:0.005;誤差數量級達10-3.BP網絡融合補償方法將誤差范圍縮小一個數量級.在快速改變測試障礙物距離時,溫度擬合公式補償方法能實時更新顯示當前距離,BP網絡融合補償方法無法實時更新顯示當前距離,存在滯后的情況.原因是溫度擬合公式補償方法運算較為簡單,STM32硬件平臺能勝任運算需求.BP網絡融合補償方法的運算相對復雜且代碼未做優化,運算復雜之處主要體現在運算過程中存在大量的權值浮點乘運算.為了滿足動態測量的實時要求,在程序優化的過程中,按BP網絡融合補償方法,事先將各個關鍵溫濕度點對應的超聲波速度求得,存儲于系統的flash中,在測量時采用查表法獲得,并參與運算.實驗結果表明優化后的程序誤差與未優化前相當,并可滿足障礙物快速移動的測試情況.
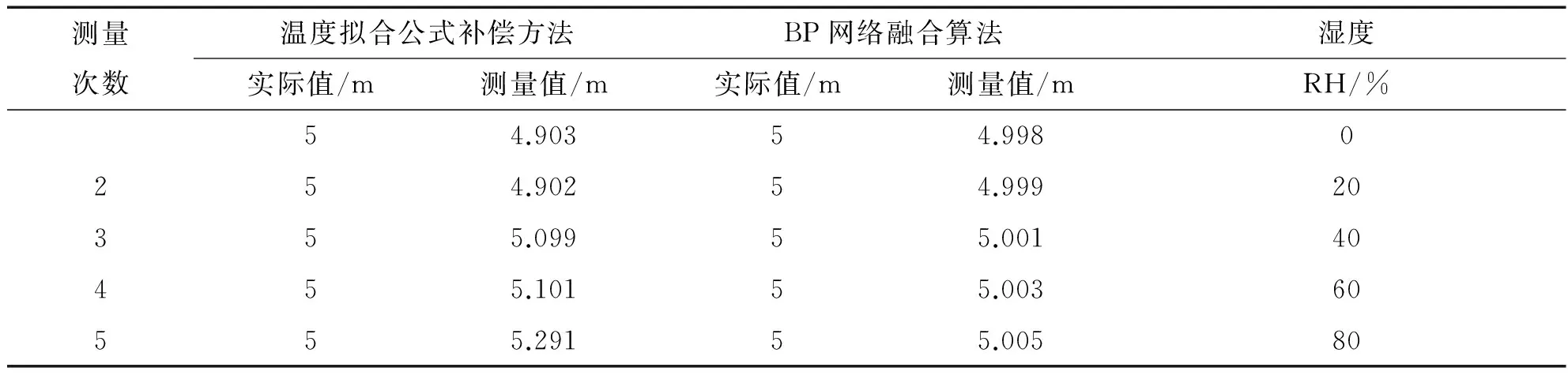
表2 溫度T=25℃時不同濕度下的結果對比
4 結論
從對比實驗結果分析可知,本文方法比簡易擬合公式補償方法在測量方面具有較高的精度,減小了系統的測量誤差.但是從STM32單片機在測距中的結果顯示更新快慢來看,直接采用BP網絡融合補償方法在靜態測量時可行,但當障礙物快速移動動態測量時,因BP網絡融合補償方法存在大量的權值浮點乘運算,STM32處理器無法勝任適時求出當前距離的要求.為了滿足動態測量的實時要求,按BP網絡融合補償方法,事先將各個關鍵溫濕度點對應的超聲波速度求得,存儲于系統的flash中,在測量時采用查表法獲得并參與運算,對程序進行優化.實驗結果表明優化后的程序誤差與未優化前相當,并可滿足障礙物快速移動的測試情況.
[1]蘭羽.具有溫度補償功能的超聲波測距系統設計[J].電子測量技術, 2013,36(2):85-87.
[2]張攀峰,王玉萍,張健,等.帶有溫度補償的超聲波測距儀的設計[J].計算機測量與控制,2012,20(6):1717-1719,1732.[3]苑潔.基于STM32單片機的高精度超聲波測距系統的設計[D].北京:華北電力大學, 2012.
[4]王玉香,張喜紅.亳州市儲藥冷庫溫濕度測控系統研究[J].機電信息, 2011(18):184-190.
[5]袁曾任.Matlab 神經網絡30例[M].北京:電子工業出版社, 2014.
[6]陳希,付興武,張興元,等.BP神經網絡在測距誤差補償中的應用[J].工礦自動化,2008(3):57-58.
[7]李曉靜.基于改進蜂群算法的神經網絡及其應用[J].瓊州學院學報, 2015,22(5):29-34.
(編校:何軍民)
Temperature and Humidity Compensation Algorithm of Ultrasonic Distance Measurement Based on STM32
ZHANG Xi-hong1,2WANG Yu-xiang1
(1.Bozhou Vocational and Technical College, Bozhou Anhui, 236800,China;2.School of Control Science and Engineering, Shandong University, Jinan 250061, China)
In order to reduce the ultrasonic ranging system error due to temperature and/or humidity difference in Matlab2010 platform, and to calibrate the temperature and humidity samples and hence the corresponding ultrasonic velocity with Fusion training simulation experiment through BP neural network, the design of the compensation algorithm is transplanted into STM32 ranging system to test its compensation ability. The current experiment showed that compared with existing methods, STM32 ranging system effectively compensates the error due to temperature and/or humidity difference, resulting in the improvement of precision to one order of magnitude.
data fusion; neural network; ultrasound
2015-12-02
安徽省教育廳醫電子儀器與維護省級特色專業質量工程項目(20101459);安徽省教育廳醫用電子儀器省級示范實習實訓中心項目(2011131);安徽省教育廳重點教研項目(2015jyxm535)
張喜紅(1983-),男,山西朔州人,亳州職業技術學院講師,碩士,山東大學訪問學者,研究方向為生物醫學工程.
TP274.5 3
A
1008-6722(2016) 02-0018-05
10.1 3307/j.issn.1 008-6722.2 016.02.04
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
