超磁致伸縮諧波電機的微位移放大器研究
2016-12-20 04:12:38朱優兵朱林劍苑順鵬曹向崢
微特電機 2016年10期
朱優兵,朱林劍,苑順鵬,曹向崢
(大連理工大學,大連 116024)
?
超磁致伸縮諧波電機的微位移放大器研究
朱優兵,朱林劍,苑順鵬,曹向崢
(大連理工大學,大連 116024)
設計了一種基于帕斯卡原理的液壓微位移放大裝置,用于超磁致伸縮諧波電機中致動器的微位移放大。對放大器的原理、結構形式及輸出特性進行了研究,同時分析了影響實際放大倍率的結構參數、系統因素并提出了改進措施。此液壓微位移放大裝置是用于超磁致伸縮諧波電機中的理想微位移放大裝置,具有結構構緊湊、承載力大、放大倍數高等優點。
超磁致伸縮; 諧波電機; 微位移放大器; 放大器特性分析
0 引 言
諧波齒輪傳動是一種靠中間柔性構件彈性變形來實現運動和傳遞動力的裝置,由剛性齒輪、柔性齒輪和波發生器構成。不同形式的波發生器構成了不同形式的諧波齒輪傳動。主要類型有:電磁驅動的諧波齒輪傳動[1]、靜電驅動的諧波齒輪傳動[2]、壓電驅動的諧波齒輪傳動[3]、液壓驅動的諧波齒輪傳動[4]等。
本文研究的超磁致伸縮諧波電機是利用超磁致伸縮材料的伸縮特性代替傳統波發生器而形成的新形式電機。超磁致伸縮材料是一種能將磁-機-電能相互轉換的新型功能材料,超磁致伸縮材料的微位移致動器具有大位移、強力、響應快、可靠性高、驅動電壓低等優點。超磁致伸縮諧波齒輪傳動組成結構示意圖如圖1所示,圖1中的4個驅動器按一定規律分布控制8個均勻分布的輸出頂桿,通過控制超磁致伸縮材料棒的伸縮變形來驅動柔輪按要求規律徑向變形,當固定剛輪時,通過剛輪和柔輪的嚙合作用,便會使柔輪產生低速旋轉[5];輸出頂桿的變化規律如圖2所示;單個驅動器試驗結構如圖3所示。
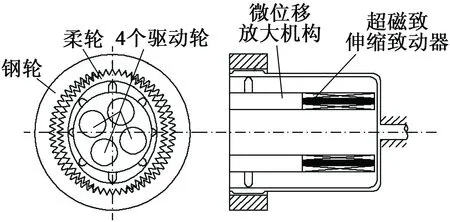
圖1 超磁致伸縮諧波齒輪傳動組成結構示意圖
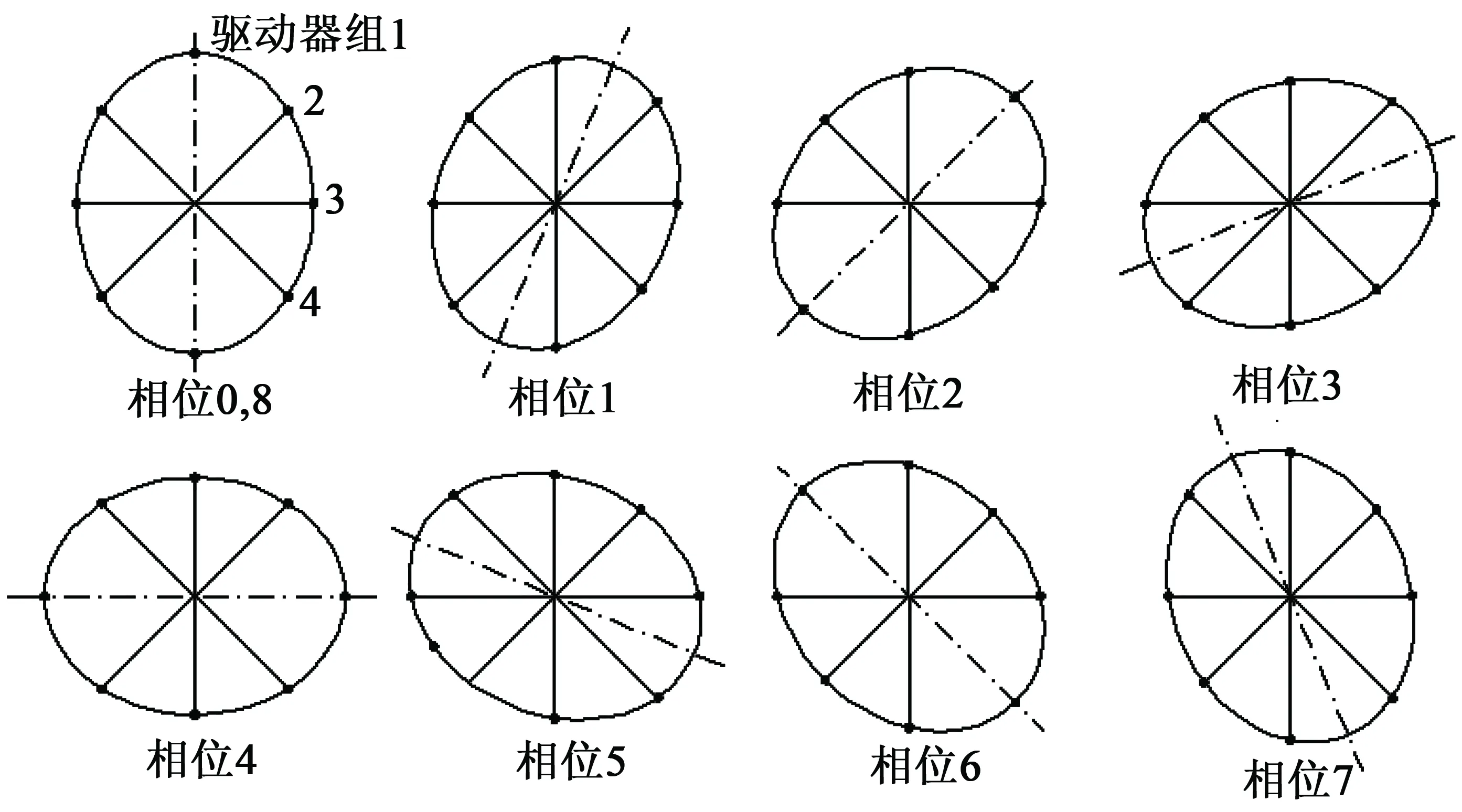
圖2 輸出頂桿的位移變化圖
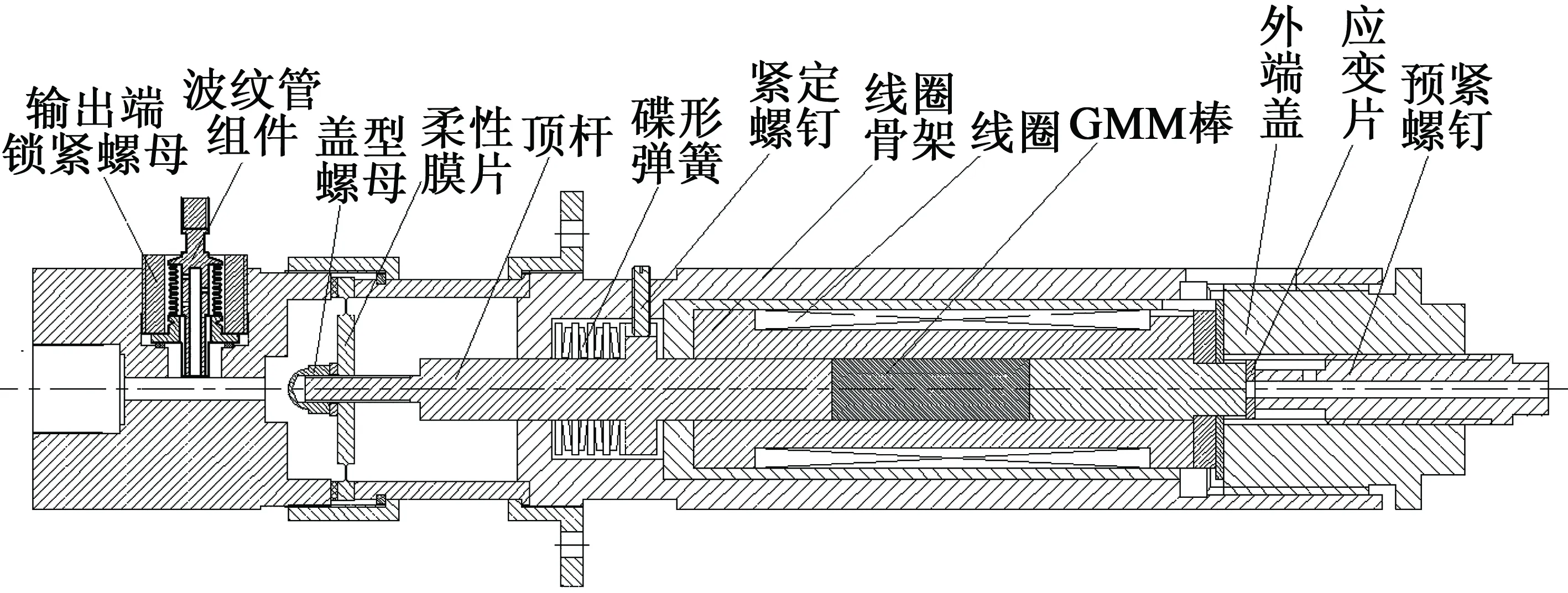
圖3 單個驅動器試驗結構圖
超磁致伸縮諧波電機主要由致動器和位移放大器組成,驅動器的特性主要取決于超磁致伸縮棒的磁致伸縮特性,位移放大器要具有較大的放大倍數,一定的承載能力及較快的響應速度。目前可實現微位移放大的機構主要有變幅桿放大、U形放大裝置、拉彎柔性鉸鏈[6]、新型菱形放大機構[7]、三角形機構、杠桿放大機構,主要用于精密定位,微位移工作臺及微位移驅動器的場合等。以上機構由于輸出放大倍數不高,效率低,承載能力弱,無法滿足諧波電機中位移放大的要求,故諧波電機采用液壓微位移放大器,相比于其它類型的位移放大器具有結構緊湊、承載力大、放大倍數高、響應快、效率高、噪音低等優點。
1 諧波電機液壓微位移放大裝置
1.1 微位移放大原理
液壓微位移放大裝置應用帕斯卡原理:不可壓縮靜止流體中任一點受外力產生壓力增值后,此壓力增值瞬時間傳至靜止流體各點,即密閉的靜止液體各處的壓強是相等的。液壓微位移放大裝置原理圖如圖4所示。
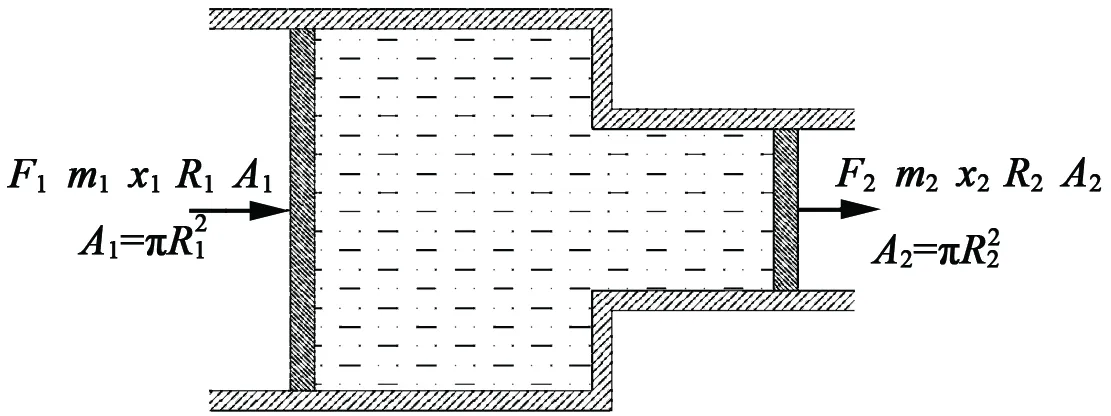
圖4 液壓微位移放大裝置原理圖
該裝置由大、小兩個活塞和一個密閉的容腔組成,大活塞端施加力F,產生位移x1,密閉容腔內的液體壓縮推動小活塞向右移動產生位移x2,忽略密閉容腔的泄露和油液的壓縮,可以認為變化前后容腔容積大小沒有變化故A1x1=A2x2,放大倍數:
此外,油液各處壓強相等,故:
在實際應用時,由于液壓油的可壓縮性和油液中的含氣量,放大倍數K比理論值小,且輸出力F2變小,為了綜合考慮放大倍數與帶載能力的要求,必須選擇合適的放大倍數,使其同時具有一定的帶載能力。同時了解到,要使其實際放大倍數更接近于理論值,應該使容腔保持完整的密閉性和液體的體積盡可能的少,以減小液體壓縮性的影響。故此液壓放大裝置在注入液壓油時必須進行抽真空處理,必須保證裝置的密閉性,排盡裝置中殘留的空氣和油液中溶解的氣體,使液壓油充滿密閉裝置。
1.2 液壓放大器結構形式設計
基于上述原理可知,微位移液壓放大器的結構形式取決于放大器輸入輸出端采用何種具體結構和密封方式,因此用于超磁致伸縮諧波齒輪傳動的液壓微位移放大結構的結構形式有彈性密封式和剛性密封式,彈性密封方式采用O型圈或格萊圈密封,密封效果太差,且容易出現爬行現象,動態響應能力差,故不適用于此種放大器。選擇剛性密封,即可以選擇金屬膜片或金屬波紋管。
液壓放大裝置的輸入、輸出端的結構選擇如表1所示。
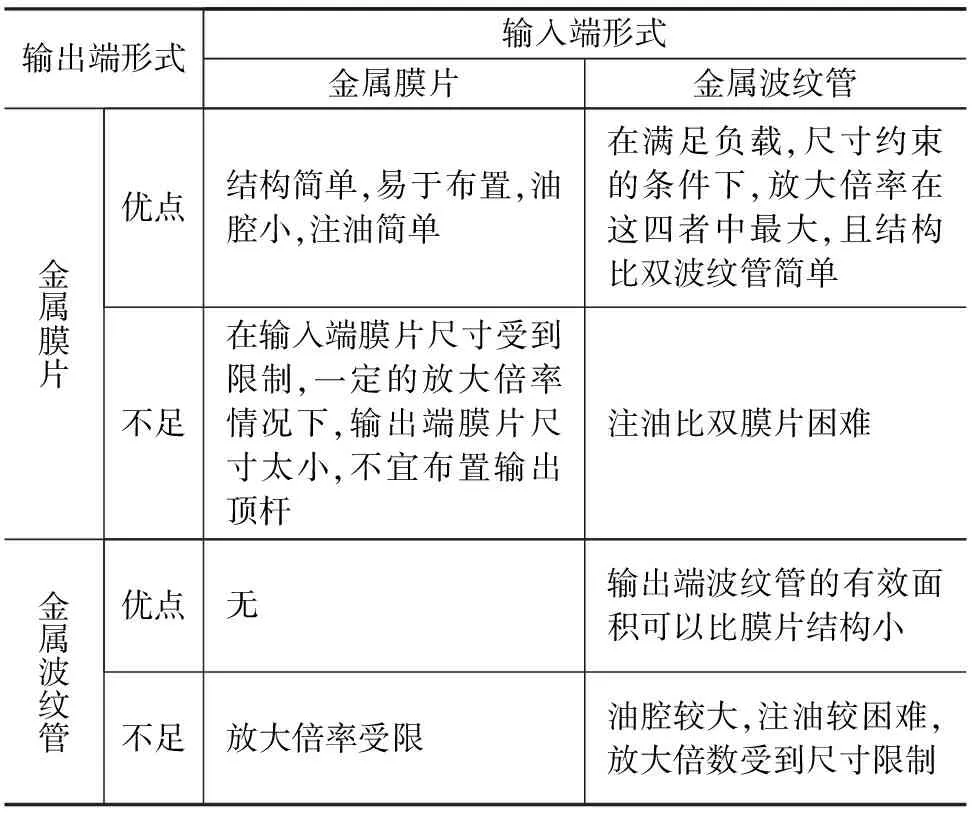
表1 液壓微位移放大裝置4種形式的比較
根據上表可知,輸入端選用金屬膜片,輸出端選用金屬波紋管。放大器結構圖(不含注油裝置)如圖5所示。
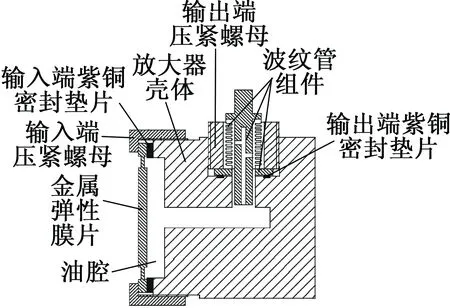
圖5 放大器結構圖
2 金屬膜片、波紋管參數設計
2.1 金屬膜片變形理論分析
選用倒圓角型柔性鉸鏈膜片,三維結構及示意圖如圖6所示。
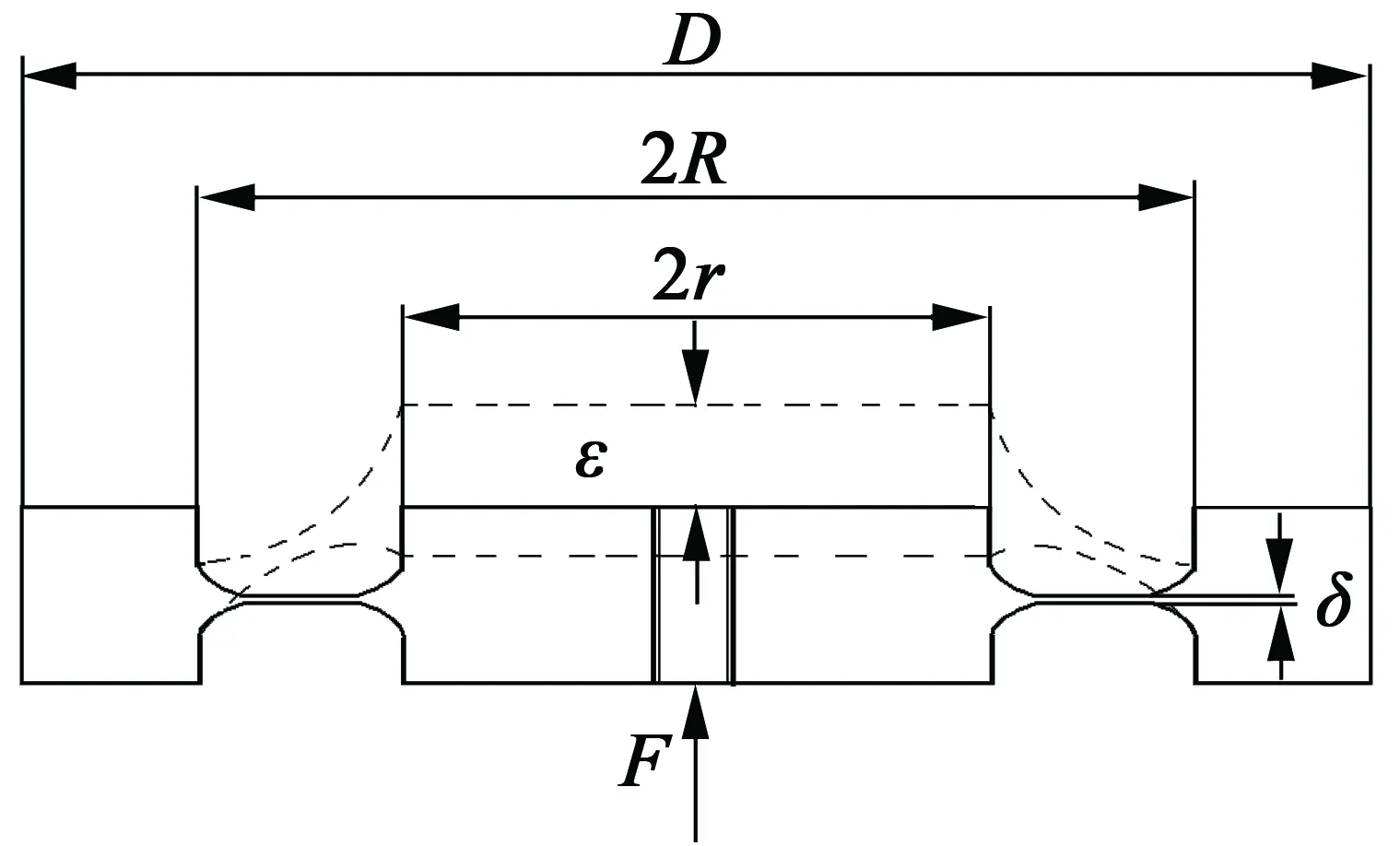
圖6 膜片主要參數示意圖
此平膜片的受力變形較復雜,用于分析的主要理論有經典彈性薄板理論,卡爾曼大撓度理論和薄膜理論。在撓度較小時,膜片主要靠剪切內力平衡外載;撓度較大時,膜片的剪切內力減小,主要靠膜片的張力平衡外載[8]。
由彈性力學圓形薄板的小撓度軸對稱彎曲理論,可得出其任意一點在極坐標下撓度的表達式[9],當F一定時,可求出膜片的最大位移量ε:
(1)
式中:E為膜片的彈性模量;μ為泊松比。
由于R受到總體尺寸的限制,所以R是固定的,r盡可能地選大,但過大會使膜片剛度太大,膜片變形困難,所以要選擇合適的r和δ,使膜片有較好剛度,利于膜片的變形,同時又滿足剪切強度的要求。
2.2 膜片選用合理參數的理論分析與ANSYS分析
使用圖6所示膜片結構,為使在ε一定時排開的油液最大,即使r最大,使過渡圓環的外端與油腔內壁對齊。
由于總體尺寸的限制,初步選定膜片的尺寸為D=51mm, R=21mm, r=17mm, δ=0.16mm超磁致伸縮材料(GMM)棒在準靜態負載下,可簡化成一定剛度的彈性體,致動器的輸出力與輸出位移之間的關系式[10]:
(2)
式中:EH為彈性模量(磁場強度為常數時);SGMM為GMM棒的橫截面積;λS為GMM棒的飽和磁致伸縮系數;LGMM為GMM棒的長度。取EH=43 GP(磁場強度為100 A/m時), GMM棒的尺寸Φ14 mm×45 mm,λS=1 320×10-6。
超磁致伸縮諧波齒輪傳動中,本實驗的GMM在尺寸、預緊力、線圈匝數等一定的情況下,不同直流電的輸出位移如圖7所示。
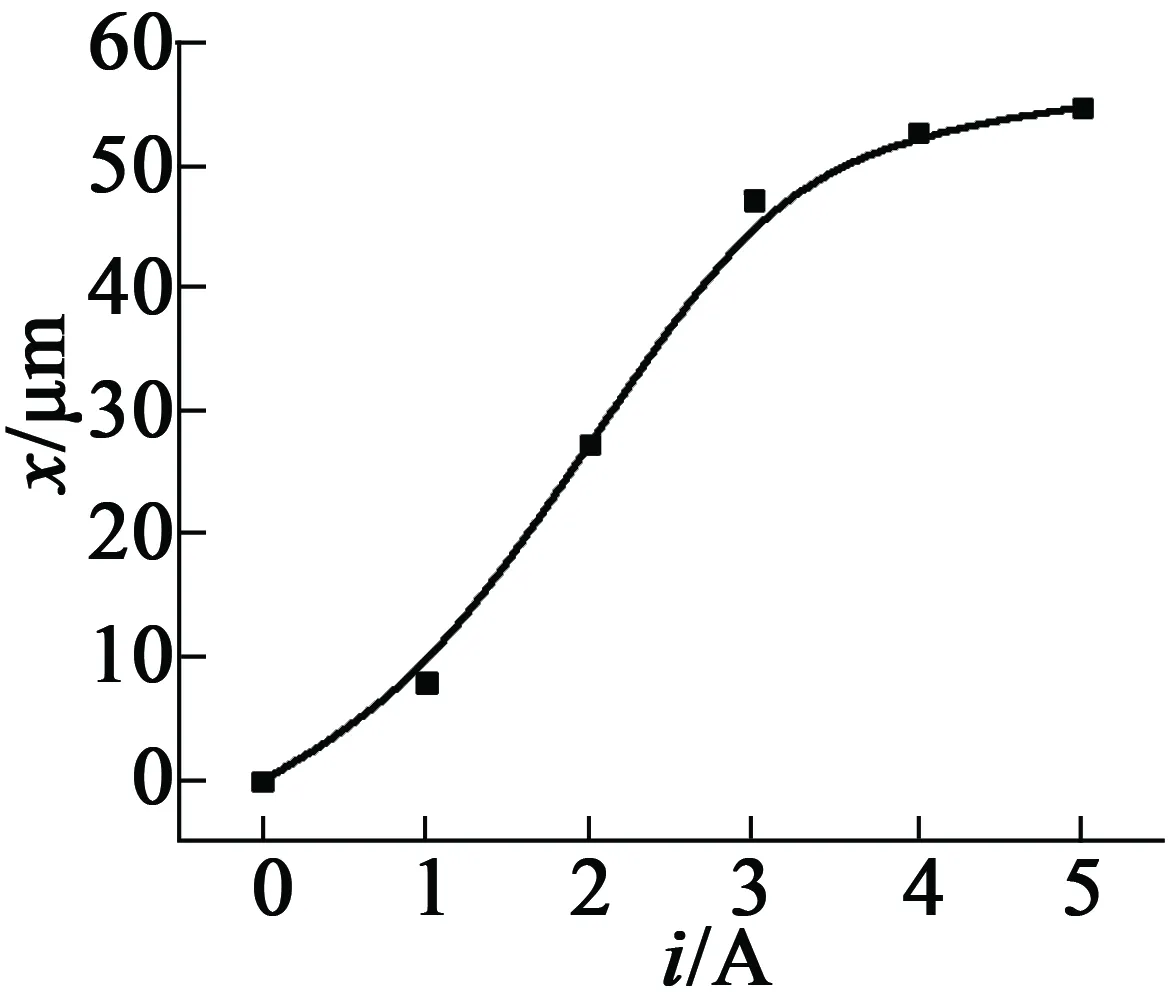
圖7 不同直流電下GMM棒的磁致伸縮曲線
由圖7可知,GMM線圈通5 A直流電,實驗測出的數據x=58.69 μm時,代入式(2)得出F=246.176 N。在將F代入式(1)中,且E=2.1×1011N/m2,μ=0.3,R=21 mm,r=17 mm。得出膜片獨立分析時ε的表達式:
當δ取0.16mm時,ε=73.56μm。將上述尺寸的膜片單獨進行有限元分析得出膜片剛性中心的位移量如下圖8所示。
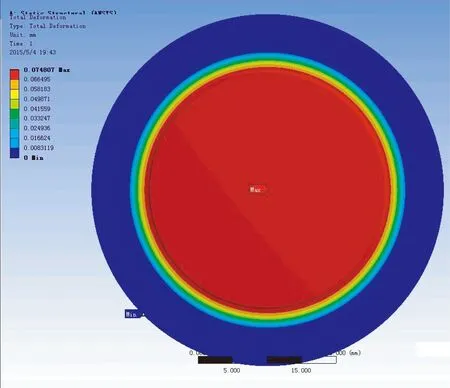
圖8 上述尺寸下膜片的位移云圖
在金屬膜片的剛性中心施加軸向載荷F=246.176N時,由ANSYS分析得出的最大位移為74.807μm,與用式(1)算出的理論值73.56μm相近。在過渡圓弧寬度一定的情況下,不同的圓弧厚度的最大位移量如圖9所示。
由圖9可知:理論曲線與ANSYS分析曲線相近;在δ為一定值時,不同圓弧寬度下的最大位移量如圖10所示,雖然膜片厚度δ越小、圓弧寬度越大時,最大位移越大,但δ越小,圓弧寬度越大即r越小時,膜片的剪切應力越大,使膜片產生破壞,綜合考慮影響取中間合適的膜片厚度和圓弧寬度,實驗所取膜片為δ=0.16mm, 圓弧寬度為4mm。
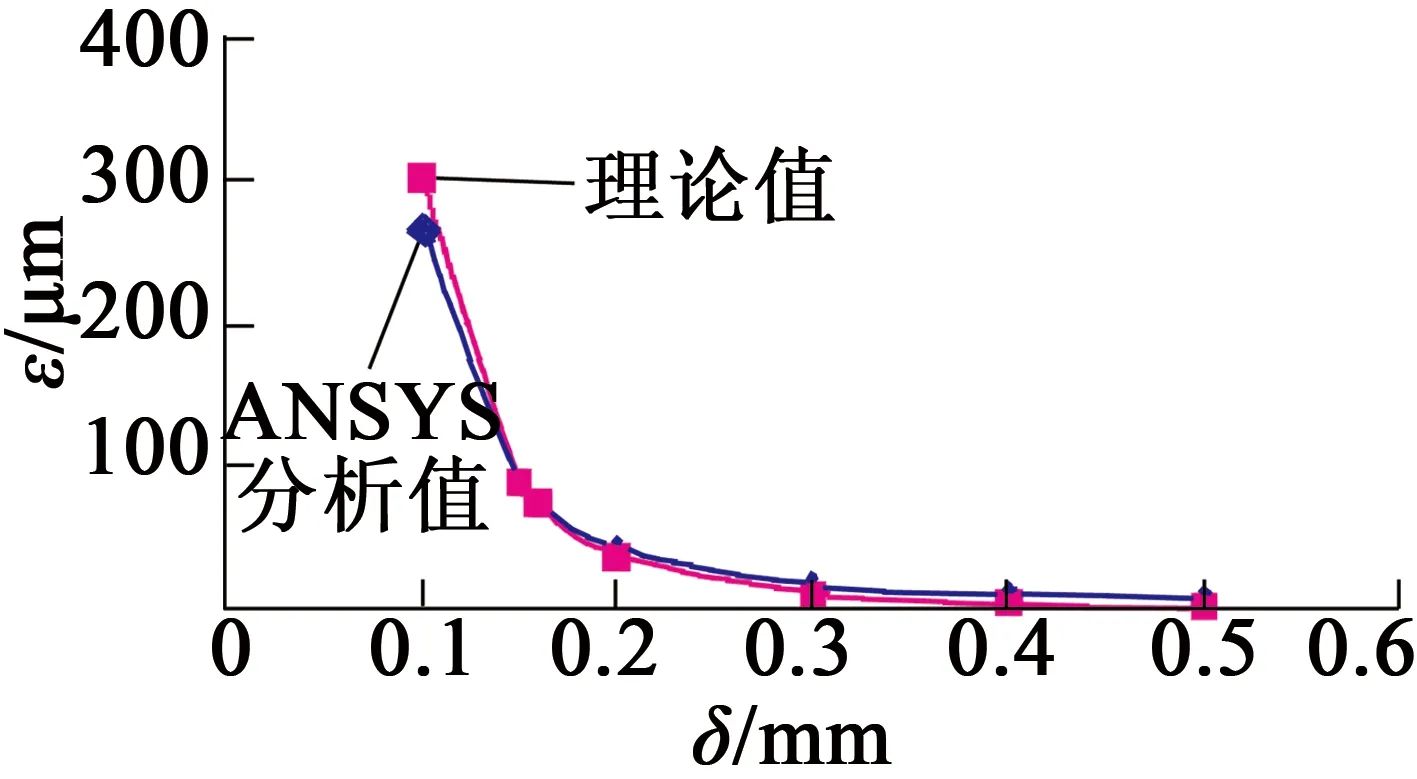
圖9 ANSYS分析值與理論值的比較曲線圖
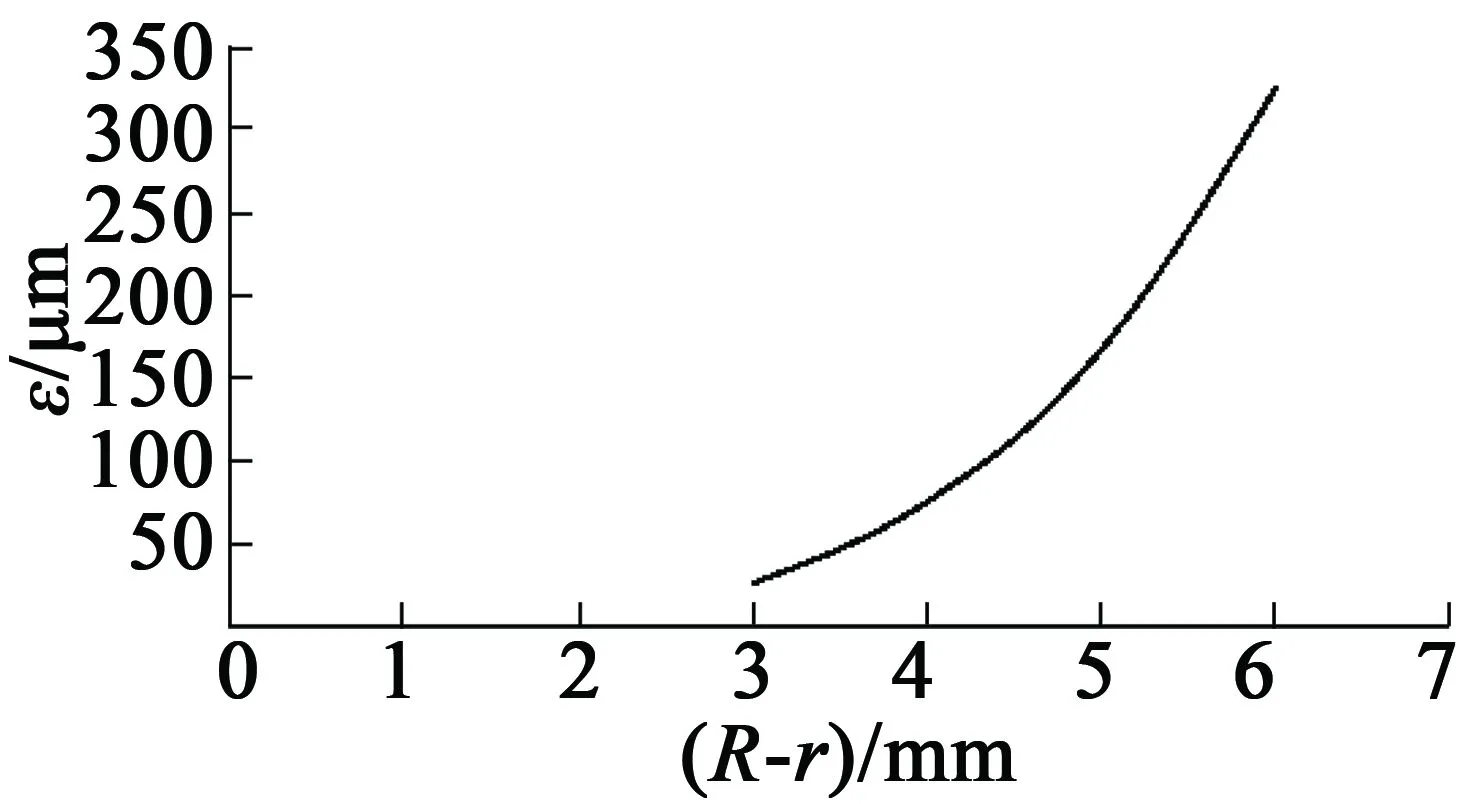
圖10 不同圓弧寬度下的最大位移量圖
2.3 微位移放大器的理論放大倍數分析
以上放大倍數的推導誤差較大,必須尋找較準確的推導公式。由波紋管剛度式[11]:
式中:F2為波紋管受到的力;x2為波紋管的伸長量;Dm為波紋管的平均直徑;E2為波紋管的彈性模量;δm為波紋管的壁厚;h為波紋管的波高;Cf為剛度系數,與q, h, Dm, δm的取值有關,如圖11所示。
圖11 系數Cf曲線圖
又已知膜片的剛度公式:
式中:F1為膜片受到的外載荷;x1為膜片剛性中心的位移;其他參數如前所注釋。由以上兩式可得:
將k1, k2的表達式代入上式可得:
將參數代入計算可得理論放大倍數K=9.72。
3 驅動器靜態位移輸出特性分析
搭建實驗平臺進行數據測量,實驗平臺主要包括驅動電源、檢測器件、數據采集卡、終端PC、安裝底座、超磁致伸縮致動器和超磁致伸縮諧波電機驅動器裝置,實驗平臺連接流程圖,實物圖如圖12、圖13所示。
圖12 實驗平臺連接流程圖

圖13 實驗平臺實物圖
3.1 靜態位移輸出特性分析
在上述驅動器實驗平臺上,對驅動器驅動線圈通0~5A直流電,用電渦流位移傳感器檢測放大器輸出端金屬波紋管的輸出位移,整理實驗數據得到超磁致伸縮諧波電機驅動器空載時在不同電流下的位移輸出特性曲線如圖14所示,不同電流下此GMM棒的位移輸出特性曲線如圖7所示。
圖14 不同電流下的位移輸出特性曲線
從圖14中可以看出:致動器在空載情況下的理論輸出位移比實際輸出位移大,靜態空載下,驅動器微位移液壓放大器的理論放大倍數為9.72,而實驗測試放大器的放大倍數為8.85,主要原因為液壓油的可壓縮性,油腔中的空氣含量,此兩者的值越小,λ越小,理論公式算出的放大倍數K越大;當λ的取值和實驗時的狀況越接近時,理論放大倍數和實驗測得的放大倍數越接近。
3.2 動態位移輸出特性分析
在實驗平臺上空載條件下對驅動器驅動線圈通頻率50Hz、幅值5A的交流電,用電渦流位移傳感器檢測放大器輸出端金屬波紋管的輸出位移,整理實驗數據得到驅動器空載時的動態位移輸出特性曲線如圖15所示。
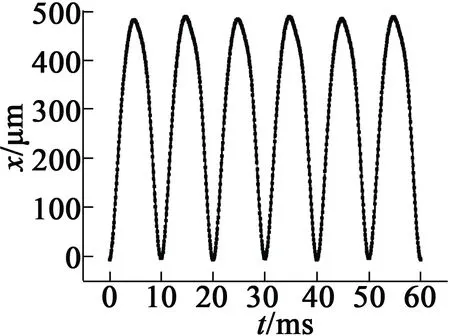
圖15 空載時驅動器動態位移輸出特性
將致動器輸出頂桿的位移數據采用MATLAB的曲線擬合工具箱CFTOOL擬合,函數擬合類型設為三角函數型,得到擬合函數表達式:
x1(t)=27.98sin (0.003 604t+1.449)+
28.02sin (0.628 1t-1.665)
曲線圖如圖16所示。
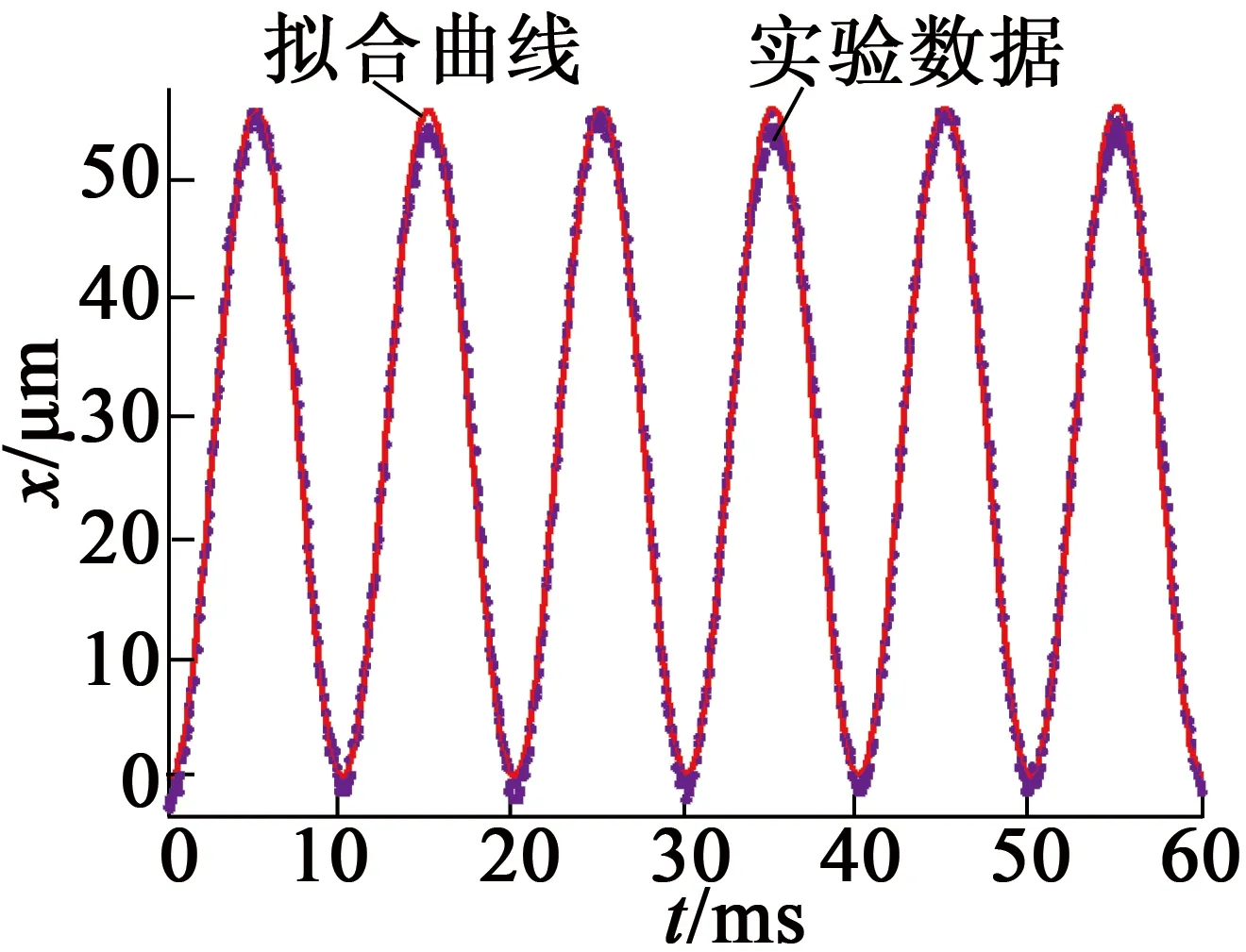
圖16 致動器實驗數據與擬合曲線
由圖15、圖16可知,波紋管的最大輸出位移為489μm,致動器的頂桿的最大位移為56μm,對應微位移放大器的實際放大倍數為8.73,理論放大倍數與通直流電時相接近。
微位移液壓放大器靜態和動態工作時,其實際放大倍數均與理論放大倍數存在一定差距,產生這種誤差的主要原因是理論放大倍數是在理想條件下推算的,而實際工作中存在各種干擾因素,比如零件的加工裝配誤差會使各部件在傳遞動力的過程中產生摩擦和磨損、檢測裝置的測量誤差等等。同時,放大器油液中含有的氣體也是影響放大倍數的一個重要因素。
4 結 語
本文驗證了超磁致伸縮諧波電機液壓微位移放大器的可行性,在此理論基礎上可改變相關的尺寸,如GMM棒的長度、橫截面積、膜片的尺寸D, r, δ以及波紋管的波數等,可增大放大倍數,為超磁致伸縮諧波電機的整機設計和特性分析打下堅實的理論基礎。小結如下:
(1)設計了一種用于超磁致伸縮諧波電機中基于液壓原理的微位移放大裝置,對柔性鉸鏈膜片剛性中心的最大位移量進行理論推導和ANSYS分析,并在此基礎上進行優化分析。
(2)推導出此液壓微位移放大器的理論放大倍數K的關系公式,并通過實驗驗證了該公式的合理性。通過分析,得出影響兩者之間的主要因素為油腔的密封性、油腔的含氣量和油液的可壓縮性,據此公式改變膜片或金屬波紋管結構尺寸可匹配不同的放大倍數。
(3)測試了致動器和驅動器的靜態和動態位移輸出特性,從結果可知,其靜態和動態特性良好,滿足工作要求。
[1] 尚振國,尤竹平.電磁式諧波齒輪傳動控制系統[J].制造技術與機床,1997(3):7-10.
[2] QIN L, XU L.Coupled dynamics for micro electromechanical integrated electrostatic harmonic drive[C]//The 3rd IEEE Conference on Industrial Electronics and Applications,Singapore.2008:1949-1952.
[3] 辛洪兵,鄭偉智.壓電諧波電機的研究[J].壓電與聲光,2004(2):122-125.
[4] 宋志剛,鐘健,朱梅.諧波齒輪傳動中流體波發生器的設計與研究[J].液壓與氣動,2008(1):6-8.
[5] 朱林劍,高文泉,包海濤,等.基于超磁致伸縮材料的諧波傳動研究[J].磁性材料及器件,2009(6):35-37.
[6] 馬亞坤.基于拉彎柔性鉸鏈的二級微位移放大機構[D]西安:西安電子科技大學,2014:7-13.
[7] 方小東.基于新型菱形放大機構的微位移工作臺結構研究[D].大連:大連理工大學,2011:35-40.
[8] 張化嵐,孫寶元.環狀平膜片撓曲變形數學模型及其試驗驗證[J].大連理工大學學報,2005,45(3):366-369.
[9] 賈振元,楊興,郭東明,等.超磁致伸縮材料微位移執行器的設計理論及方法[J].機械工程學報,2001,37(11):46-49.
[10] 唐志峰.超磁致伸縮執行器的基礎理論與實驗研究[D].杭州:浙江大學,2005:28-29.
[11] 汪揚.多層波紋管膨脹節的強度、剛度與屈曲分析研究[D].南京:南京航空航天大學,2005:44-46.
A Research of Micro Displacement Amplifier on the Giant Magnetostrictive Harmonic Motor
ZHU You-bing,ZHU Lin-jian,YUAN Shun-peng,CAO Xiang-zheng
(Dalian University of Technology,Dalian 116024,China)
This paper designed a hydraulic micro displacement amplification device based on the Pascal law, used for the micro displacement magnification of actuators in the giant magnetostrictive harmonic motor. The principle, structure and output characteristics of the amplifier were studied, at the same time, the structure parameters and the system factor were analyzed, which is impact the actual magnification and put forward improvement measures. The hydraulic micro displacement amplification device is ideal for use in the giant magnetostrictive harmonic motor micro displacement amplification device, with compact structure, large bearing capacity and high amplification, etc.
giant magnetostrictive; harmonic motor; micro displacement amplifier; amplifier characteristics analysis
2015-12-29
國家自然科學基金項目(51275069)
TM359.9
A
1004-7018(2016)10-0013-05