基于最小沖擊的三自由度永磁球形電機軌跡規劃
2016-12-20 04:25:01吳鳳英翟獻超張登權
微特電機 2016年10期
關鍵詞:規劃
吳鳳英,翟獻超,張登權,李 睿
(天津理工大學,天津 300384)
?
基于最小沖擊的三自由度永磁球形電機軌跡規劃
吳鳳英,翟獻超,張登權,李 睿
(天津理工大學,天津 300384)
為了提高三自由度永磁球形電機在指定時間內完成運動任務的平滑性,減小運動過程中的振動程度,提出一種能達到最小沖擊的軌跡規劃方法。為保證沖擊連續,該方法采用5次B樣條曲線插值位置序列,將運動學約束轉化為B樣條曲線控制頂點約束,以沖擊平方積分的最小值作為平滑性能指標。采用遺傳算法對最小沖擊性能指標和相對應的時間節點向量全局尋優,規劃出最小沖擊軌跡。最后,通過仿真實驗驗證了該方法的可行性和有效性。
三自由度; 永磁球形電動機; 最小沖擊;B樣條; 遺傳算法
0 引 言
永磁球形電機是一種工作原理新穎,高度集成化的機電能量轉換裝置,具有機械集成度高、體積小、傳動鏈簡單、精度高、節能等優點[1]。永磁球形電機的軌跡規劃是永磁球形電動機運動控制的重要內容之一,其目的是在滿足運動學及動力學約束條件下,利用合適的方法規劃出運動軌跡,通過指定路徑點,計算其運動學參數,以滿足運動平穩,軌跡平滑連續的要求。
對球形電機的運動控制,各國學者進行了一些研究,并取得了一定的科研成果。針對永磁球形步進電機,Kok-Meng Lee等人建立了三自由度耦合運動的動力學約束方程,并在此基礎上實現球形電機的實時運動控制[2-5];約翰霍普金斯大學的David Stein等人利用RO3旋轉群理論和勢函數對運動過程進行了規劃[6-7];國內的王群京等人利用四元數描述球形轉子的三自由度轉動,并將自適應模糊控制等策略應用于球形電動機的運動控制過程[8-11]。這些研究著眼于從原理上解決球形步進電機的軌跡規劃問題。針對永磁球形直流電動機,謝菲爾德大學的Wang J等人利用永磁球形直流電動機模型結合運動學模型和動力學模型,實現了永磁球形電動機的運動控制[12-13];亞琛工業大學K. Kahlen等人采用空間轉矩矢量的排序算法、分類方法和近似算法實現了電機的實時運動控制[14];南洋理工學院的Yan L等人推導了基于球諧級數的磁場力矩解析模型,并對其運動規劃和控制做了初步探索[15-16];天津大學等研究機構將計算轉矩法應用于永磁球形電動機動力學模型,實現了永磁球形電動機的力學解耦控制[17]。上述的研究和實驗在原理上成功實現了永磁球形直流電動機連續軌跡的運動控制,但是,這些研究主要集中在運行機理、運動控制策略等單一問題的分析與解決上,沒有涉及對運動過程中角速度、角加速度和沖擊等狀態變量的規劃。在軌跡規劃中,平滑、快速、低耗、沖擊小等性能指標是非常重要的幾個指標[22-27],本文針對三自由度永磁球形電機連續運動軌跡的規劃問題進行了研究,以最小沖擊為規劃目標并考慮在運動過程中角速度、角加速度和沖擊的運動學約束,提出一種采用五次B樣條曲線插值位置序列的軌跡規劃方法,提高三自由度永磁球形直流電動機在指定時間內完成運動任務的平滑性,減小運動過程中的振動。
1 永磁球形電機最小沖擊軌跡規劃問題描述
1.1 永磁球形電機運行原理及等效模型
永磁球形電機運行原理如圖1(a)所示,它由定子線圈和球形轉子組成,在殼型定子上均勻排列若干個定子線圈,在球形轉子上沿赤道兩側均勻粘貼永磁體;單個定子線圈與永磁體作用產生電磁力驅動球形轉子運動,多個定子線圈產生的轉矩可分解為三個自由度方向上的轉矩驅動球形轉子實現三自由度運動。球形轉子的運動姿態通常用方位矩陣表示,也可采用歐拉角或四元素法表示,考慮到歐拉角參數較少,采用歐拉角表示。在這種情況下,球形轉子的運動可以等效為具有3個旋轉關節的四桿結構,等效模型如圖1(b)所示,此四桿機構由依次串聯的桿件0、桿件1、桿件2、桿件3構成開鏈機構,球形轉子安裝在桿件3上。桿件0、桿件1、桿件2、桿件3之間由單自由度旋轉運動副鏈接,各桿件的鏈接關系如圖1所示。桿件1、桿件2、桿件3均可繞前一桿件作旋轉運動,3個運動副軸線彼此正交于O(o)點,各桿件的質量均為0。三自由度球形電機與特定的三連桿工業機器臂具有相同結構形式的運動學模型和動力學模型。
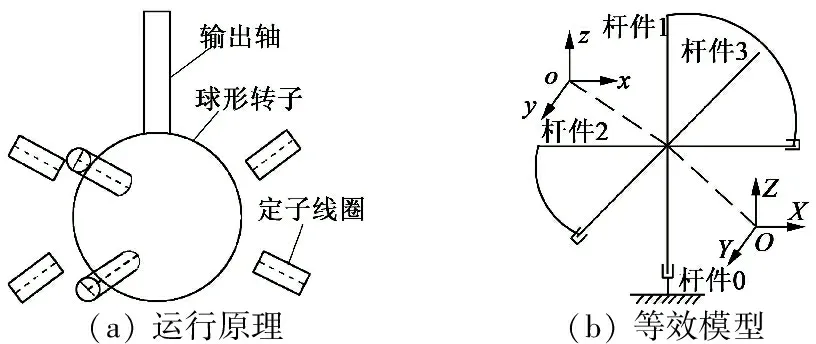
(a)運行原理(b)等效模型
圖1 永磁球形電動機運行原理及等效運動模型
1.2 永磁球形電機最小沖擊軌跡規劃

永磁球形電機的運動過程可以用位姿余弦矩陣表示,根據球形轉子的位姿余弦矩陣逆運動學反解求出角位移位置序列θmi和對應的時間ti,構成一系列的角位移-時間序列 然后采B樣條曲線插值角位移-時間序列得到相應的軌跡曲線θ(t)={(θmi, ti)|i=0,1,…,n}。
等效關節的沖擊累積越小,軌跡越平穩,將等效關節沖擊平方積分作為優化指標,構造最小沖擊軌跡規劃問題的目標函數:
(1)
球形轉子運動軌跡還必須運動學約束的要求:
(2)
式中:cvm,cam,cjm分別為關節m的速度、加速度、沖擊約束。所以三自由度永磁球形電機最小沖擊軌跡規劃是在滿足以上目標函數與約束條件綜合作用下的最優軌跡尋優過程。
2 基于B樣條的最小沖擊軌跡規劃
三自由度永磁球形電動機角位移軌跡用B樣條可描述:
式中:θ(u)為時刻u處的輸出軸位置,di(i=0,1,…,n)為控制頂點,u為定義k次B樣條的定義域向量u=[u0,u1,…,ui+2k]。并且有:
Ni,k(u)(i=0,1,…,n)為k次B樣條基函數,它是由非遞減參數節點矢量u組成k次分段多項式,由德布爾-考克斯遞推公式可得:
(3)
B樣條曲線具有局部支承和Ck-1階連續特性,其r階導數可由德布爾-考克斯遞推公式求出,即:
(4)
求導得:
(5)
取k=5,得到n+5個控制頂點的向量的n+5個方程。即:
(6)
3 遺傳算法尋優
3.1 運動學約束處理
三自由度永磁球形電機的軌跡規劃過程是受各種因素限制的,包括位移、速度、加速度和沖擊的約束。將以上運動學約束轉化為B樣條控制頂點的約束,由于三自由度永磁球形電機的結構特點導致輸出軸的運動范圍受限,也就是球形電機的運動軌跡是受限的,故存在位移約束:
其控制頂點還應滿足:
(7)
結合式(1)和式(7),可將三自由度永磁球形電機規劃描述為描述為以下非線性約束問題,即:
(8)
由于B樣條具有強凸包性,所以只要滿足以上約束條件的最優化沖擊最小軌跡對應的時間節點向量和全局最小累計沖擊Δt*和J(Δt*)就是全局極小點。
3.2 遺傳算法尋優
將約束條件轉化為遺傳算法中的罰函數:
(9)
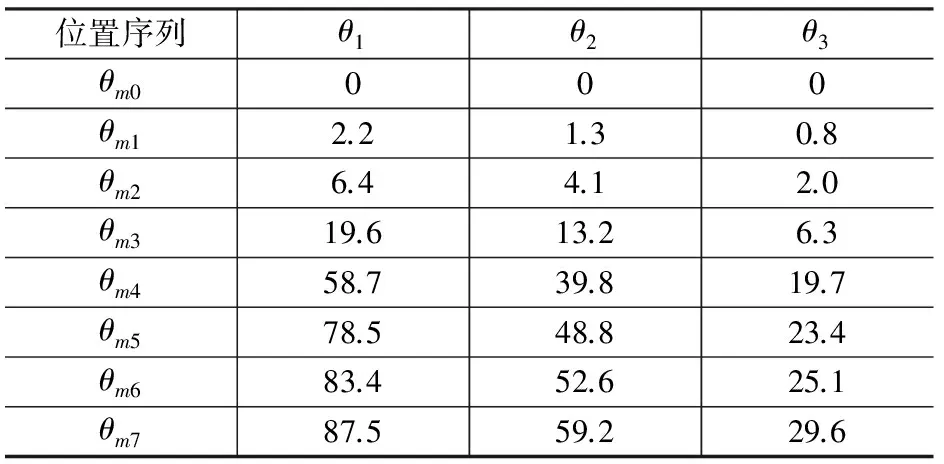
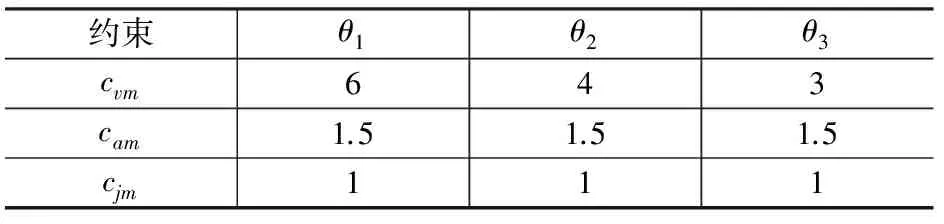
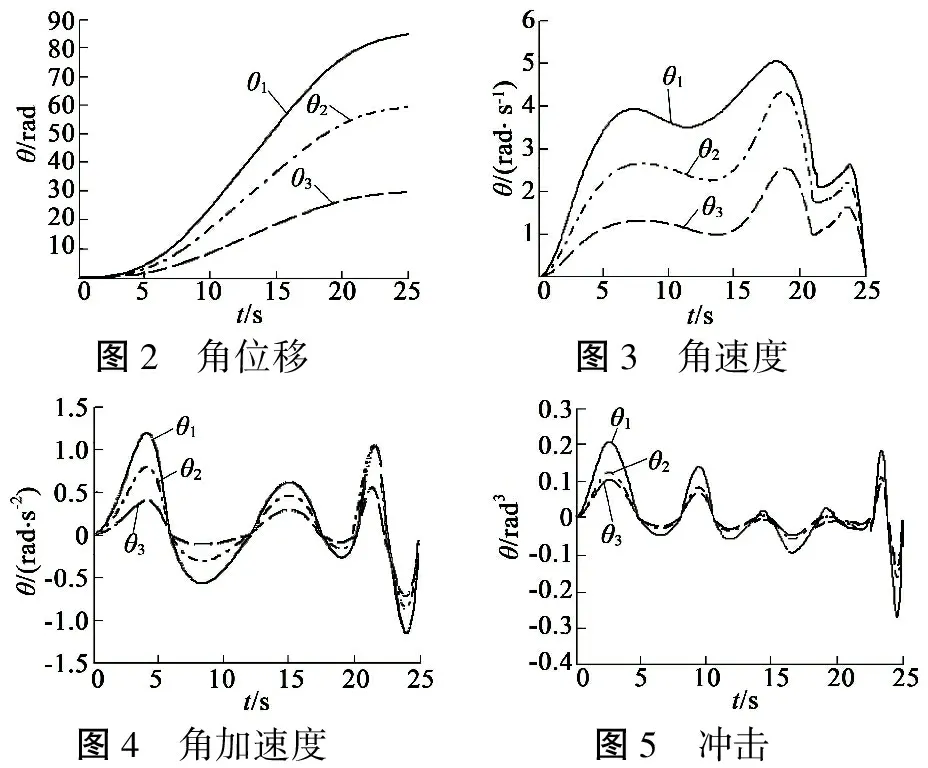
式中:μi(i=1,2,3)為待定系數,由MATLAB工具箱中的GeneticAlgorithmTool來進行遺傳算法的運算,其默認為求適應度函數的最小值。選擇算子和交叉算子均選用遺傳算法工具箱默認的設置。變異算子采用非一致變異方式,設變異概率為ym,對群體中的每一個個體Xi隨機選取其中某一變量xi,在(0,1)內產生一隨機數r,若有r 通過遺傳算法可求解出適應度函數最小時三自由永磁球形電機各段軌跡最優的時間間隔Δt*。將優化后的時間間隔與相應的位置序列通過B樣條連接得到其沖擊最小的軌跡規劃曲線。 基于三自由度永磁球形電機的幾何參數,在MATLAB上進行了仿真實驗,結合其角位移范圍約束、角速度約束、角加速度約束和沖擊約束條件,驗證算法的有效性。設球形轉子的初始位姿R0和終點位姿Rf用方向余弦矩陣分別表示: 通過逆運動學公式反解得到位置序列如表1所示。 表1 位置序列 運動學約束如表2所示。 表2 運動學約束 設定起停速度、加速度和沖擊均為0,沖擊最小軌跡執行時間Tdef,采用遺傳算法,得到軌跡全局最小累計沖擊J(Δt*)和對應的時間節點向量Δt*。設定Tdef=25s,得到沖擊最小軌跡的時間節點向量Δt*=[3.59,4.26,3.34,4.03,3.21,3.42,3.15 ]T。其軌跡規劃的位移、速度、加速度和沖擊的仿真結果如圖2~圖5所示。 圖2 角位移圖3 角速度圖4 角加速度圖5 沖擊 本文提出一種基于五次B樣條的三自由度永磁球形電機軌跡規劃方法,并且結合角速度、角加速度和沖擊限制的運動學約束進行規劃,使用遺傳算法對性能指標和時間節點向量尋優,得到了在限定時間內經過指定位置的沖擊最小的軌跡規劃方法,保證沖擊的連續性和規劃出的軌跡平滑性,并且本方法亦可用于三自由度永磁球形電機的避障軌跡規劃。 [1] 李爭,王詠濤,葛榮亮,等.永磁球形多自由度電機研究進展綜述[J].微電機,2011,44(9):66-70. [2]LEEKM,VACHTSEVANOSGJ,KWANCK.Developmentofasphericalwriststeppermotor[C]//ProceedingsofIEEEInternationalConferenceonRoboticsandAutomation,1988:267-272. [3]LEEKM,KWANCK.Designconceptdevelopmentofasphericalstepperforroboticapplications[J].IEEETrans.onRobotsandAutomation,1991,7(1):175-180. [4]BAIK,LEEKM,FOONGS.Directfield-feedbackcontrolformulti-DOFsphericalactuators[C]//Proceedingsofthe2011InternationalConferenceonRoboticsandAutomation,2011:5825-5830. [5]SONH,LEEKM.Open-loopcontrollerdesignanddynamiccharacteristicsofasphericalwheelmotor[J].IEEETransactionsonIndustrialElectronics, 2010,57(10): 3475-3482. [6]CHIRIKJIANGS,STEIND.KinematicDesignandcommutationofasphericalsteppermotor[J].IEEE/ASMETransactionsonMechatronics,1999,4(4):342-353. [7]STEIND,SCHEINERMANER,CHIRIKJIANGS.Mathematicalmodelsofbinarysphericalencoders[J].IEEE/ASMETransactionsonMechatronics,2003,8(2):234-244. [8] 王群京,陳麗霞.基于加權無向圖的永磁球形步進電機運動控制[J].中國電機工程學報, 2005,25(9): 130-134. [9] 王群京,陳麗霞,李爭,等.基于光電傳感器編碼的永磁球形步進電機運動控制[J].中國電機工程學報,2005,25(13):113-117. [10] 過希文,王群京,李國麗,等.基于摩擦補償的永磁球形電機自適應模糊控制 [J].中國電機工程學報,2011,31(15):75-81. [11] 鞠魯峰,王群京,李國麗,等.永磁球形電機的支持向量機模型的參數尋優 [J].電工技術學報,2014,29(1): 85-89. [12]WANGJ,WANGW,JEWELLGW,eta1.Anovelsphericalpermanentmagnetactuatorwiththreedegrees-of-freedom[J].IEEETrans.onMagnetics,1998,34(4):2078-2080. [13]WANGW,WANGJ,JEWELLGW,eta1.Designandcontrolofanovelsphericalpermanentmagnetactuatorwiththreedegreesoffreedom[J].IEEE/ASMETransactionsonMechatronics, 2003,8(4): 457-468 . [14]KAHLENK,VOSSI,PRIEBEC,etal.Torquecontrolofasphericalmachinewithvariablepolepitch[J].IEEETransactionsonPowerElectronics,2004,19(6):1628-1634. [15]LIMCK,CHENI-M,YANL,etal.Electromechanicalmodelingofapermanent-magnetsphericalactuatorbasedonmagnetic-dipole-momentprinciple[J].IEEETransactionsonIndustrialElectronics,2009,56(5):1640-1648. [16]YANL,CHENI,LIMC.Modelingandiron-effectanalysisonmagneticfieldandtorqueoutputofelectromagneticsphericalactuatorswithironstator[J].IEEE/ASMETransactionsonMechatronics, 2012,17(6):1080-1087. [17] XIA C L,GUO C,SHI T N.A new algorithm for dynamic decoupling control of HPMSM using fuzzy controllers[C]//IEEE International Conference on Industrial Electronics and Application.IEEE,2008:1031-1035. [18] XIA C L,XIN J G,SHI T.Design and analysis of a variable arc permanent magnet array for spherical motor[J].IEEE Transactions on Magnetics,2012,49(4): 14706-1478. [19] 蘇仲飛,劉昌旭,韋平順,等.機器人關節用三自由度球形直流伺服電動機[J].高技術通訊, 1994(8):16-18. [20] 黃聲華,陶醒世.三自由度電動機自適應控制[J].電工技術學報,1998,2(1):10-12. [21] 諸靜.球形電動機及其運動軌跡控制[J].中國電機工程學報, 1993,13(5):50-56. [22] LEEH J,PARK H J,RYU G H,et al.Performance improvement of operating three-degree-of-freedom spherical permanent-magnet motor[J].IEEE Transactions on Magnetics,2012,48(11):4654-4657. [23] MULLER P A,BOUCHERIT R,LIN S.Smooth and time-optimal trajectory planning for robot manipulators[C]//2012 American Control Conference.2012:5466-5471. [24] HUANG M S,HSU Y L,FUNG R F.Minimum-energy point-to-point trajectory planning for a motor-toggle servomechanism [J].IEEE/ASME Transactions on Mechatronics, 2012,17(2):337-343. [25] RYMANSAIB Z,IRAVANI P,SAHINKAYA M N.Exponential trajectory generation for point to point motions[C]//IEEE/ASME International Conference on Advanced Intelligent Mechatronics.2013:906-911. [26] MELIGY R E,BASSIUNY A M,BAKR E M.A feasible minimum-time trajectory of robot manipulator[C]//Proceeding of the 9th International Symposium on Mechatronics and its Application.2013. [27] 劉松國,朱世強,吳文祥.具有時間約束的機械手最優平滑軌跡規劃方法[J].電機與控制學報,2009,13(6):897-902. Minimum-Jerk Trajectory Planning of 3-DOF PM Spherical Motor WU Feng-ying,ZHAI Xian-chao,ZHANG Deng-quan,LI Rui (Tianjin University of Technology,Tianjin 300384,China) In order to improve the smoothness and reduce the vibration during the motion of the three degree of freedom permanent magnet spherical motor in the definite time,a minimum-jerk trajectory planning method was proposed .To ensure the jerk continuously, the method used fifth B spline interpolation position sequence, and transformed the kinematic constraints to B spline control points constraint, and took the minimum integral of squared jerk as minimum-jerk performance index.Genetic algorithm was used to seek the minimum-jerk performance index and the corresponding time nodes, and then the global optimization minimum-jerk trajectory planning was got. Finally, the feasibility and effectiveness of the proposed method are verified by simulation experiments. 3-DOF; PM spherical motor; minimum-jerk; B-spline; genetic algorithm 2016-04-20 天津市應用基礎與前沿技術研究計劃資助項目(14JCYBJC18400) TM351;TM359.9 A 1004-7018(2016)10-0082-04 吳鳳英(1961-),女,副教授,研究方向為電機與電器。
4 仿真實驗
5 結 語
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41