基于卡爾曼濾波的TDM網絡時鐘同步方法研究*
2016-12-07 05:38:19寸天睿
楚雄師范學院學報 2016年9期
關鍵詞:卡爾曼濾波
寸天睿
(楚雄師范學院信息科學與技術學院,云南 楚雄 675000)
?
基于卡爾曼濾波的TDM網絡時鐘同步方法研究*
寸天睿
(楚雄師范學院信息科學與技術學院,云南 楚雄 675000)
網絡時鐘同步是TDM網絡中必須要考慮的關鍵問題,其中采用IEEE1588時鐘同步協議的軟件同步方法在高精度同步場合應用廣泛。如果時鐘同步過程中鏈路不對稱會引入時間數據偏差問題,采用同步補償的方法從一定程度上改進了時間同步精度,但該類方法沒有考慮環境噪聲的問題,容易造成TDM網絡不穩定。本文提出一種基于卡爾曼濾波的TDM網絡時間間接補償方法,對時鐘同步獲取的信息先進行卡爾曼濾波降噪處理,然后再通過頻率調整進行時間間接補償,在提高同步精度的同時,提升了TDM網絡的穩定性。
TDM網絡;卡爾曼濾波;時鐘同步
1.引言
在時分復用(Time Division Multiplexing, TDM)的網絡中必須要考慮的一個關鍵問題就是網絡時間同步。在TDM網絡中通常每個通信節點都包含一個時鐘,各個通信節點按照時間順序有序的向網絡中發送數據,降低時鐘同步誤差是維持整個網絡穩定運行的關鍵。目前時鐘同步的常用方案有使用時鐘同步協議進行軟件方式同步和硬件方式同步兩種,其中采用IEEE1588時鐘同步協議的軟件同步方法在高精度同步場合應用很廣泛,如無線傳感器中網絡的時鐘同步[1],以太網中的時鐘同步[2]和城域網中的時鐘同步[3]等。但是,由于IEEE1588協議本身并沒有考慮通信鏈路噪聲,鏈路對稱性問題和時間戳標記誤差對時間數據帶來的影響,因此需要對時鐘進行補償調整。
針對時鐘同步過程中鏈路不對稱引入的時間數據偏差問題,文獻[4]和文獻[5]通過修改協議中計算時間偏差的方式來提高同步精度;針對時間戳標記誤差,文獻[6]和文獻[7]通過設計高速硬件電路來減少由軟件執行引入的誤差。這些方式從一定程度上改進了同步精度,但沒有考慮環境噪聲的干擾。針對環境噪聲的問題,文獻[8]引入卡爾曼濾波器對接收到的時鐘偏差進行濾波預處理從而提高時間同步數據精度,文獻[9]在文獻[8]的基礎上使用卡爾曼濾波,同時對時鐘偏差和頻率數據進行濾波處理,大大提高了同步精度。然而以上的方法采用的都是時鐘偏差直接補償的方式,這種補償方式在時分復用的控制網絡中會帶來時間補償后的突變,造成系統運行不穩定[10,11]。因此如何對時鐘同步過程進行數據濾波降噪處理和合理的補償是生產實際中TDM網絡能否穩定運行的關鍵之一。
本文提出一種基于卡爾曼濾波的頻率間接補償方法。對同步協議獲取的時間偏差采用卡爾曼濾波提高偏差精度然后對計時時鐘管理單元的計時頻率進行調整,達到間接補償時間偏差的目的,提高時鐘同步的精度和系統的穩定性。本文研究首先對IEEE1588時鐘同步模型及傳統的直接同步補償方式進行說明并闡述存在的問題;然后對基于卡爾曼濾波的頻率間接補償進行研究;再次通過仿真分析證明本文提出方法的有效性;最后對全文所做的工作進行小結。
2.IEEE1588時鐘同步補償分析
2.1 TDM時鐘同步模型和誤差分類
時鐘同步誤差可歸為三類,時間偏差,頻率偏差和頻率漂移[12],時鐘時間偏移示意圖如圖1。將從時鐘在時刻Tn讀取的時間值記為C(t),將在時刻n的默認準確參考時間值記為T(n)=t。并定義以下誤差表示方式,如無特殊說明,后續將沿用這種表示方式:
(1)時間偏差:時鐘時間與標準參考時間的偏差,令θ(t)表示時間偏差則有:
θ(t)=C(t)-t
(1)
(2)頻偏率:通常采用頻偏率來衡量頻率偏移程度[15]。則頻偏率γ計算如式(2),其中fT為標準頻率值,fi為從節點時鐘頻率值。
(2)
(3)頻率漂移:由所處環境的改變而造成的長期的頻率改變。本文采取的補償機制在每個短時間周期內進行,所以相對來說長時間發生的頻率漂移可視為常量,本文不做討論。
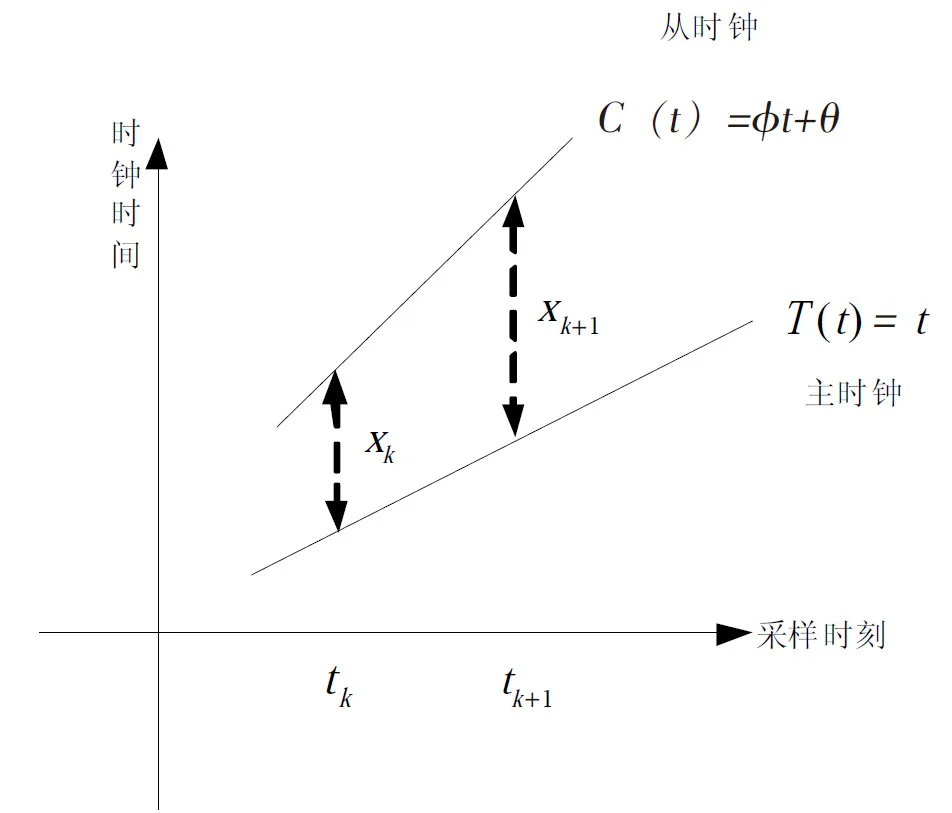
圖1 網絡時鐘時間偏移示意圖
為分析方便,本文引入狀態變量模型對節點時鐘進行分析和描述,狀態變量模型在很多先前的研究中被采用,如參考文獻[9]、[13]中采用狀態變量模型對時鐘進行建模。時鐘補償主要針對時間和頻率這兩個變量,文獻[14]采用兩個狀態變量的模型進行分析,這種模型也是嵌入式系統時鐘管理模塊分析中常采用的數學模型,本文也采用這種模型進行分析。時鐘管理模塊的輸出電壓由式(3)給定,其中fT是編程設定的時鐘計數頻率,Φ0是初始相位,Φ(t)是影響時間精度的隨機過程,為不失一般性可設Φ(t)期望E[Φ(t)]=Φ0。
(3)
由于相位噪聲對基于IEEE1588協議的時鐘同步方法沒有影響[15],從而得到時間偏差的離散遞歸表達式(4),其中ΔT=Tn-Tn-1。
θ(n+1)=θ(n)+γ(n)ΔT
(4)

θ(n+1)=θ(n)+γ(n)ΔT+ωθ(n)
(5)
γ(n+1)=γ(n)+ωγ(n)
(6)
2.2直接時差補償機制
直接時差補償機制在計算出時鐘偏差后直接對從時鐘時間進行加減補償,其補償流程如圖2示。這種補償方式是IEEE1588定義的補償方案,該方案用主從時鐘節點交換數據報文計算出的時鐘偏差值對從節點時鐘值進行直接加減。在文獻[11]等研究中采用通過增加冗余節點,設計硬件時戳發生器等方案對計算出的時鐘偏差進行直接補償。近年來由于卡爾曼濾波算法在各個領域的廣泛應用,在[9]、[10]等文獻中采用卡爾曼濾波對計算出的時間偏差先濾波,進行偏差準確性評估和預測后再直接補償,通過仿真驗證效果良好。
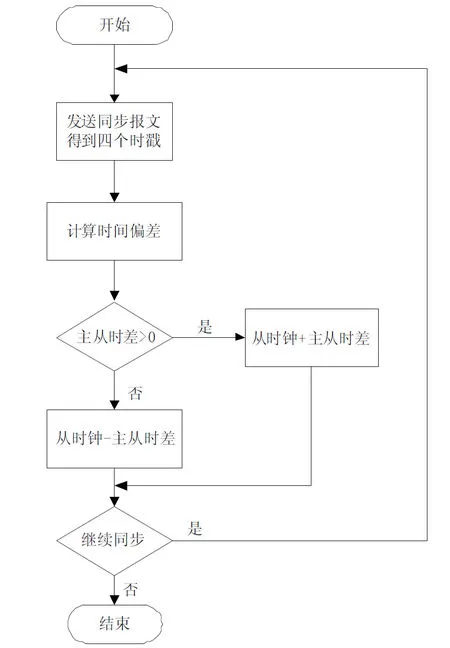
圖2 網絡時鐘同步直接時差補償流程圖
但是,在分布式網絡控制系統中,直接補償將會使從節點時鐘產生突變和較大的波動,出現“時間快進”和“時間逆流”等不穩定現象[10][11]。文獻[10]提出通過IEEE1588協議得出時間偏差后對時鐘頻率進行補償的漸進補償方法,但是沒有考慮對獲得的時間偏差進行降低噪聲的處理,對漸進式補償只提出展望沒有具體實現。在實際網絡控制系統中,由于各個受控器件嚴格按照時序響應命令并采取相應調整行為,而時鐘經過直接補償產生突變將會造成系統不穩定。

圖3 時鐘直接補償示意圖

3.卡爾曼濾波頻率間接補償
3.1卡爾曼濾波的特性
目前,很多專家學者對卡爾曼濾波技術在時鐘同步補償中的應用進行了研究。如在文獻[16]中對卡爾曼濾波在全球定位系統時鐘同步中的補償進行了研究。在文獻[17]中對卡爾曼濾波技術在無線網絡時鐘同步中進行頻率跟隨進行了研究,在文獻[18]中對將卡爾曼濾波用于網絡時間協議中進行數據預處理提高系統穩定性進行了研究。
通過對已有文獻的研究,可以歸納得出卡爾曼濾波的三個重要特性:
(1) 當被跟隨信號的方差呈高斯分布時卡爾曼濾波是最優估計方法。在文獻[19]中已證明由于時鐘變動疊加導致的偏差近似服從高斯分布。
(2) 卡爾曼濾波增益決定了濾波器的帶寬。可以通過合理的選擇濾波參數,在測量噪聲的同時不改變濾波延遲。
(3) 卡爾曼濾波算法可以通過軟件和硬件方式實現且實現容易。
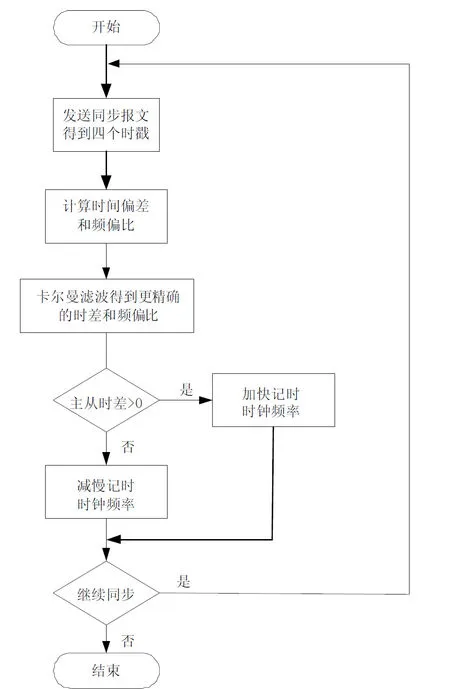
圖4 卡爾曼濾波頻率間接時差補償流程圖
基于以上三點特性,下節將使用卡爾曼濾波方法對時間偏差進行更精確的估計和補償。
3.2卡爾曼濾波頻率間接時鐘補償機制
對時間誤差的直接補償會使時間突變造成TDM網絡系統運行不穩定,如上節所述,由式(5)時間偏差和頻率偏差的關系可知,對時間偏差的調節也可以通過頻偏比進行調節,綜合頻偏和時間偏差值對從節點的記時時鐘管理單元計數頻率進行調節,即當從節點時鐘慢于主時鐘時,加快從節點計數頻率,使其時鐘頻率加快,在下一個同步時鐘周期到達時盡量縮小時間偏差;當從節點時鐘快于主時鐘時,降低從節點時鐘計時器計數頻率,使其計數頻率減慢,等待主時鐘節點跟近。考慮到時鐘偏差的精確度對整個補償過程至關重要,所以下文提出一種采用卡爾曼濾波估計的間接時差補償方法,對得到的時差和頻偏先進行卡爾曼濾波提高數據準確度,然后對時鐘管理模塊計數頻率進行間接補償調整,調整結束后的值再返回到系統中進行新一輪的卡爾曼濾波和調整,整個補償機制示意圖如圖4所示。
為了達到主從時鐘同步,在時刻n將時差校正uθ(n)和頻偏率校正uγ(n)輸入式(5)和式(6)所建立的狀態時鐘模型可得式(7)和式(8)。
θ(n+1)=θ(n)-uθ(n)+[γ(n)-uγ(n)]·ΔT+ωθ(n)
(7)
γ(n+1)=γ(n)-uγ(n)+v(n)
(8)
由于有干擾的存在,時差和頻偏信息存在誤差,本文采用卡爾曼濾波方法對頻率補償進行濾波預處理。將上述兩式合并寫成矩陣形式如式(9):
x(n)=Ax(n-1)+Bu(n-1)+ω(n-1)
(9)
其中:u(n)=[uθ(n),uγ(n)]T是輸入向量,x(n)=[θ(n) γ(n)]T是狀態向量,矩陣A和B分別為式(10)和(11),ΔT為IEEE1588同步報文Sync的報文間隔:
(10)
(11)
定義θM(n)為時刻n時的測量時間偏差,如式(12)。其中γM(n)是時刻n時的測量頻偏率。則有:
(12)
由此,可以定義卡爾曼濾波測量方程如式(13):
z(n)=Hx(n)+v(n)
(13)

定義了上述方程后,就可以得出卡爾曼濾波的五個方程[20],這五個方程在很多介紹卡爾曼濾波的教材中都有講述。


(14)
P(n|n-1)=AP(n-1)AT+Q
(15)
卡爾曼濾波增益為式(16):
K(n)=P(n|n-1)[P(n|n-1)+R]-1
(16)
卡爾曼濾波校正過程方程可以定義為式(17)和式(18):

(17)
P(n)=[I-K(n)]P(n|n-1)
(18)
其中R是二階測量噪聲協方差矩陣,根據θM(n)和 γM(n)關系有:
(19)

(20)
通過時鐘同步協議進行同步報文交換,得到時刻n時候從時鐘與主時鐘的時間偏差θM(n),則如果期望從時鐘在主時鐘經歷固定周期△T到達n+1時達到同步,則從時鐘時鐘管理單元計時頻率fs按式(21)設置為:
(21)
所以從時鐘節點的頻率補償值Δfs設置為式(22):
(22)
將式(15)帶入得到化簡后的頻率補償式(23)。
(23)
θM(n)通過時間同步交換同步報文獲得的時間戳計算得到,得到θM(n)后計算得出頻偏比的測量值γM(n),經過卡爾曼濾波輸出的評估值γ(n)作為調整參考,根據式(23)對從節點時鐘進行頻率調整,從而減少時間偏差,由于環境中溫度,電磁干擾等噪聲的存在,頻率的調整不能一步到位,整個頻率調整過程循環往復,逐漸趨向主時鐘頻率,從而到達間接補償時間偏差的目的。
4.仿真分析

(1)時鐘偏差直接補償與時鐘偏差頻率補償
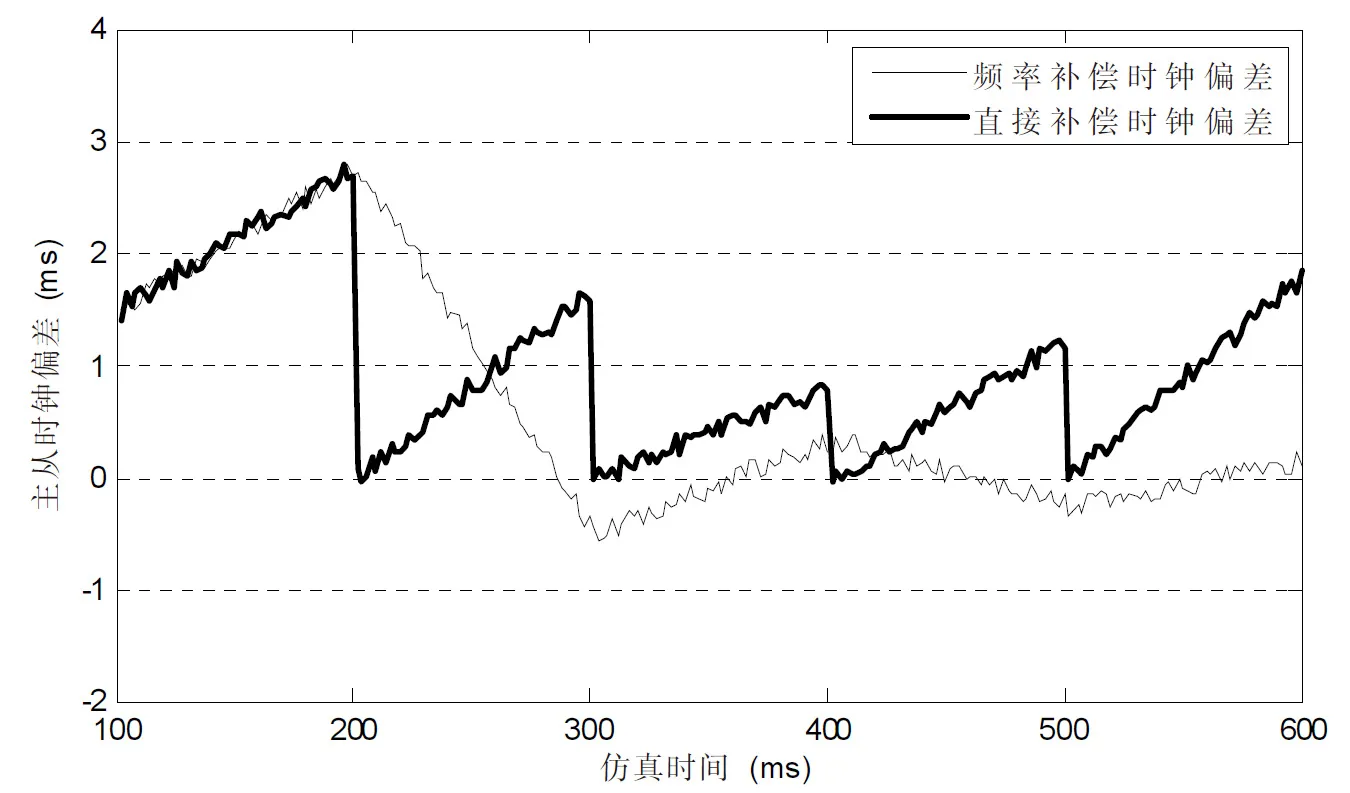
圖5 直接補償與頻率補償的時鐘偏差
對時鐘采取時鐘偏差直接補償和時鐘偏差頻率間接補償后的對比如圖5示。在仿真開始的前200ms由于沒有進行時鐘補償,主從時鐘偏差值越來越大。從200ms開始,每隔100ms分別對時鐘偏差進行直接補償和頻率補償,整個仿真過程中加入了噪聲干擾,因此時鐘偏差值存在小幅抖動。
如圖5所示直接時鐘補償在每次補償時由于直接調整從時鐘的時間值,造成時間突變,同時由于沒有調整時鐘頻率,主從時鐘偏差在每次補償結束逐漸拉大。頻率補償方式通過調整時鐘計數頻率的方式進行補償。每次補償后,從時鐘時間值連續變化,主從時鐘時間偏差漸近的縮小,每一個補償周期的時鐘偏差與上一個補償周期的時間偏差范圍相比越來越小。
對比兩種補償方式可以看出,頻率補償方式雖然沒有直接補償時差調整速度快,但在400ms時,經過4次補償后,時鐘偏差變化范圍已經小于0.2ms,而直接補償在400ms后的時鐘偏差變化范圍還在1.8ms上下浮動。因此頻率補償的時鐘同步的精度得到了很大提高。同時由于頻率補償的時間變化過程是連續的,能保證存在時間觸發事件的通信網絡穩定運行。
(2)無卡爾曼濾波時鐘頻率補償與卡爾曼濾波時鐘頻率補償
仿真對比了加入卡爾曼濾波和沒有加入卡爾曼濾波的頻率補償方式的時鐘偏差,由于在整個過程中加入了噪聲干擾,時鐘偏差值存在小幅抖動,如圖6所示。仿真前200ms由于沒有進行時鐘補償,主從時鐘偏差越來越大。從200ms開始每隔100ms對時鐘偏差值分別進行卡爾曼濾波處理后的頻率補償和不經過卡爾曼濾波的頻率補償,兩種情況都能使從時鐘以漸近的方式縮小與主時鐘的時鐘偏差。但引入卡爾曼濾波對時鐘偏差值進行降噪處理后,時鐘差值的精度得到了提高,使得補償結果相比沒有引入卡爾曼濾波更為精確,整個時鐘偏差的變化趨勢更為平滑。
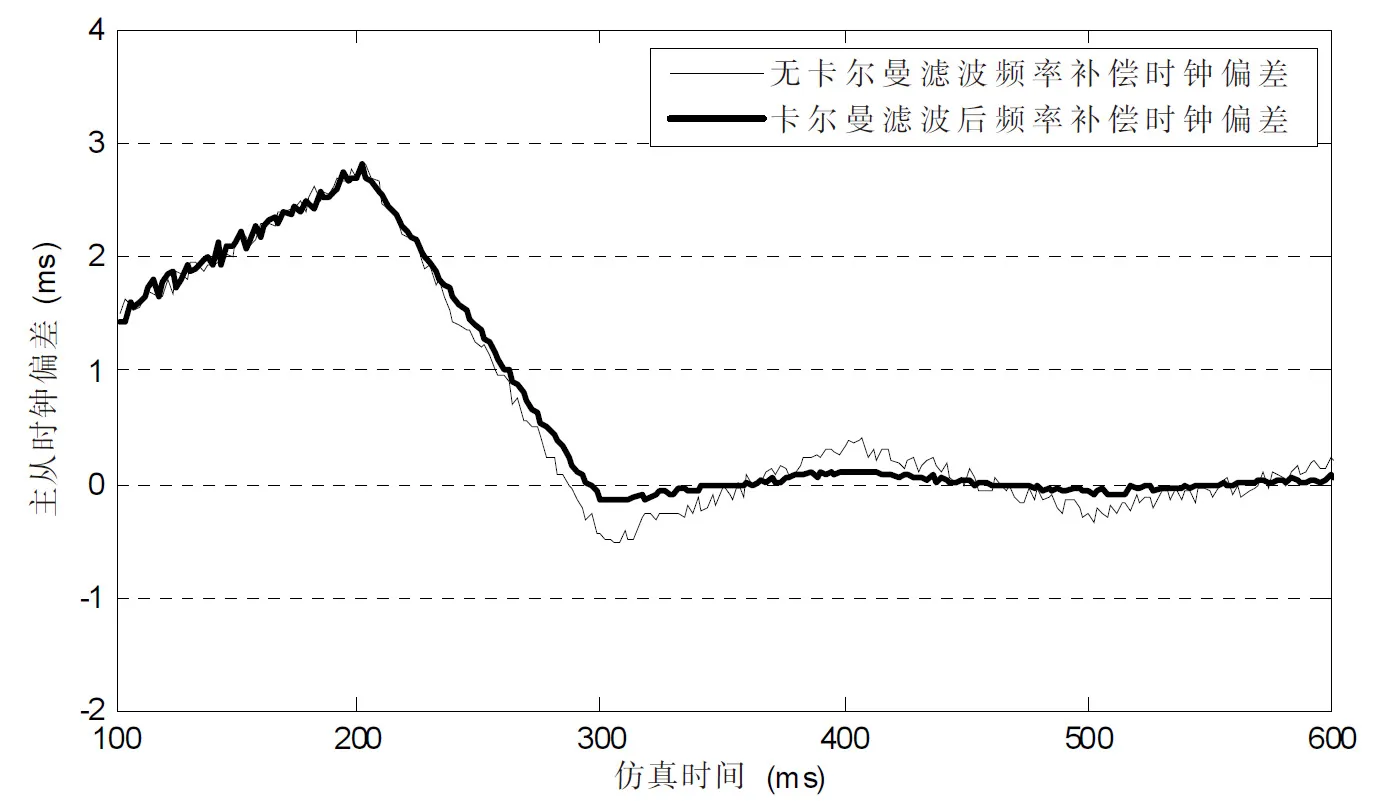
圖6 有無爾曼濾波的頻率補償時鐘偏差
5.小結
本文對TDM網絡中的精確時鐘同步技術做了深入的研究。分析了直接時鐘補償對TDM網絡運行帶來不穩定的原因并提出一種采用卡爾曼濾波的時鐘頻率間接補償方法。該方法通過對同步獲取的信息進行濾波處理降低噪聲干擾,提高了時差數據的準確性,然后對時鐘計數頻率進行補償,通過這種方式間接改進時鐘偏差,在提高時鐘同步準確度的同時保證了系統的穩定性。
[1] Sung H., Kyeong P., Doo-Seop E.. Energy-efficient and rapid time synchronization for wireless sensor networks[J]. IEEE Transactions on Consumer Electronics, 2010, 56(04): 2258―2266.
[2] Chenglong Q., Feng J.. Research and design of industrial Ethernet switch based on IEEE1588 standard[A]. IEEE International Conference on Advanced Power System Automation and Protection[C]. 2011.
[3] Alcatel L., Murray H.. A synchronization algorithm for packet[J]. Communications. IEEE Transactions on Communications, 2011,59(04):1142―1153.
[4]Shuai L.. An enhanced IEEE 1588 time synchronization for asymmetric communication link in packet transport network[C]. IEEE Communication Letters, 2010, 14(08): 764―766.
[5]Simanic N.. Compensation of asymmetrical latency for ethernet clock synchronization[A]. International IEEE Symposium on Precision Clock Synchronization for Measurement Control and Communication (ISPCS)[C], 2011.
[6]Wenjun H.. Hardware-based solution of precise time synchronization for Networked Control System[A]. IEEE International Conference on Electronics, Communications and Control[C], 2011.
[7]Yang K.. A new design for precision clock synchronization based on FPGA[A]. 16th IEEE-NPSS Conference on Real Time[C], 2009.
[8]Bletsas L.. Evaluation of Kalman filtering for network time keeping[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 2005, 52(09): 1452―1460.
[9]Giorgi G.. Performance analysis of kalman-filter-based clock synchronization in IEEE 1588 networks[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(08):2902―2909.
[10]張建斌. 基于工業以太網的列車通信網絡研究[D]. 北京: 北京交通大學, 2011.
[11]Weidong Y.. IEEE1588 clock servo algorithm[A]. 9th International Conference on Electronic Measurement & Instruments[C], 2009.
[12] Aziz M.. The use of ethernet for single on-board train network[A]. IEEE International Conference on Networking, Sensing and Control[C], 2008.
[13] Scheiterer L.. Synchronization performance of the precision time protocol in industrial automation networks[J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58(06): 1849―1857.
[14] Fuchs E.. The future of silicon photonics: not so fast insights from 100G ethernet LAN transceivers[J]. IEEE Journal of Lightwave Technology, 2011, 29(15): 2319―2326.
[15]喬英忍. 世界鐵路動車組的技術進步水平和展望[J]. 國外鐵道車輛, 2007, 44(03): 7―8.
[16] Zuohu L.. High Precision Clock Synchronization and Control Based on GPS[A]. IEEE International Conference on Electrical and Control Engineering[C], 2010.
[17] Abubakari L., Hedayat A.. IEEE 1588 style synchronization over wireless link[A]. IEEE International Symposium on Precision Clock Synchronization for Measurement, Control and Communication[C], 2008.
[18] Aziz M.. The use of ethernet for single on-board train network[A]. IEEE International Conference on Networking, Sensing and Control[C], 2008.
[19]Ferrari P.A distributed instrument for performance andysis of real-time ethernet networks[J]. IEEE Transactions on Industrial Informatics, 2008,4(01):16―25.
[20]Welch G., Bishop G.. An introduction to the kalman filter[Z]. Department of Computer Science, University of North Carolina, July 2006.
(責任編輯 劉洪基)Research on the Clock Synchronization Method of TDM Network Based on Kalman Filter
CUN Tianrui
(SchoolofInformationScience&Technology,ChuxiongNormalUniversity,Chuxiong, 675000,YunnanProvince)
The important issue of the TDM network is precise time synchronization. The software synchronization method using the IEEE1588 clock synchronization protocol is widely used in the high precision synchronization.If the link of the time synchronization process is asymmetrical, it will introduce time data deviation. Using synchronous compensation method will improve time accuracy to a certain extent, but this method does not consider the problem of environmental noise which is easy to cause the network system instability. This paper presents a method of TDM network clock indirect compensation based on Kalman filter. The information of the time synchronization is firstly denoised by Kalman filter, then clock is adjusted by the frequency indirectly to compensate the time. This method can both improve the time synchronous accuracy and enhance the stability of TDM network.?
TDM network; Kalman filter; time synchronization
2016 - 05 - 26
寸天睿(1987―),男,碩士,助教,主要研究方向:網絡計算。
TP393.01
A
1671 - 7406(2016)09 - 0057 - 08
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
