固定時(shí)間穩(wěn)定航天器相對軌道懸停控制
2016-12-01 05:20:25孫延超趙文銳李傳江李東禹馬廣富
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2016年4期
孫延超,趙文銳,李傳江,李東禹,馬廣富
(哈爾濱工業(yè)大學(xué) 航天學(xué)院,150001 哈爾濱)
?
固定時(shí)間穩(wěn)定航天器相對軌道懸停控制
孫延超,趙文銳,李傳江,李東禹,馬廣富
(哈爾濱工業(yè)大學(xué) 航天學(xué)院,150001 哈爾濱)
針對航天器相對空間目標(biāo)的定點(diǎn)懸停控制需求,基于非線性反饋固定時(shí)間穩(wěn)定算法設(shè)計(jì)了一種閉環(huán)懸停控制律.闡述了固定時(shí)間穩(wěn)定的原理,以C-W方程為相對運(yùn)動模型設(shè)計(jì)了懸停控制律,可以通過改變相關(guān)控制參數(shù)來消除初始懸停誤差和干擾的影響,實(shí)現(xiàn)對控制效果的調(diào)節(jié).結(jié)果分析表明,提出的控制律對初始懸停誤差收斂速率較快,能夠保持長時(shí)間、高精度定點(diǎn)懸停,仿真結(jié)果驗(yàn)證了方法的有效性.
懸停控制;固定時(shí)間穩(wěn)定;相對軌道;閉環(huán)控制;相對軌道控制
隨著新世紀(jì)航天技術(shù)的發(fā)展,世界各國對空間資源的利用和支配已經(jīng)成為未來太空競爭的發(fā)展趨勢[1].航天器懸停控制是航天技術(shù)的重要發(fā)展方向之一.“懸停”是指伴隨航天器與參考航天器在長時(shí)間內(nèi)保持相對位置不變的狀態(tài).懸停技術(shù)在深空探測、非合作目標(biāo)在軌服務(wù)、跟蹤監(jiān)視等領(lǐng)域具有廣泛的應(yīng)用[2-3].
最初關(guān)于懸停的研究大多是相對小天體的懸停技術(shù)[4].文獻(xiàn)[5]設(shè)計(jì)了對小行星Castalia進(jìn)行懸停控制的方法.文獻(xiàn)[6]基于“無死區(qū)”的控制思路,對小行星懸停控制時(shí)的邊界問題進(jìn)行了研究.文獻(xiàn)[7]提出利用電推進(jìn)實(shí)現(xiàn)重力牽引航天器相對小行星的懸停.文獻(xiàn)[8-9]對文獻(xiàn)[7]的動力學(xué)方程和推進(jìn)方法等進(jìn)行了改進(jìn).近年來,追蹤航天器相對于目標(biāo)航天器的懸停技術(shù)具有了一定的研究結(jié)果.文獻(xiàn)[2-3]分別設(shè)計(jì)了圓軌道下航天器相對于目標(biāo)的正下方以及任意位置的開環(huán)懸停控制方法.文獻(xiàn)[10-12]針對橢圓軌道任意位置懸停和共面懸停的開環(huán)控制算法進(jìn)行了深入的研究.文獻(xiàn)[13]采用LQR最優(yōu)控制方法設(shè)計(jì)了航天器閉環(huán)懸停控制律.文獻(xiàn)[14]基于誤差遞推模型設(shè)計(jì)考慮偏心率差異的控制律,實(shí)現(xiàn)了共面軌道內(nèi)的編隊(duì)?wèi)彝?刂?文獻(xiàn)[15]提出了基于θ-D非線性尋優(yōu)算法的懸停控制律.但是上述文獻(xiàn)普遍存在的問題是:1)開環(huán)定點(diǎn)懸停控制方法對初始狀態(tài)誤差比較敏感,對攝動力等干擾的魯棒性較差,而且控制誤差會隨時(shí)間積累,甚至無法維持懸停;2)目前已有的懸停閉環(huán)控制方法通常實(shí)現(xiàn)的是使懸停誤差漸近收斂的過程,并且在存在干擾時(shí),懸停的精度無法得到保證.近年來,有限時(shí)間控制問題引起了廣泛的關(guān)注.相比于漸近穩(wěn)定控制,有限時(shí)間控制能在有限時(shí)間內(nèi)使系統(tǒng)達(dá)到穩(wěn)定,并且通常具有更好的魯棒性和抗擾動性(關(guān)于有限時(shí)間控制的詳細(xì)介紹,可以詳見文獻(xiàn)[16]).其中文獻(xiàn)[17]基于固定時(shí)間穩(wěn)定的概念,給出了一種新型的有限時(shí)間控制算法,可以不依賴于系統(tǒng)初始狀態(tài),預(yù)先確定收斂時(shí)間.
針對上述問題,受文獻(xiàn)[17]的啟發(fā),本文基于固定時(shí)間穩(wěn)定理論設(shè)計(jì)了相對空間目標(biāo)的閉環(huán)懸停控制律.在存在初始懸停誤差和干擾的情況下能在有限時(shí)間內(nèi)達(dá)到懸停控制的目的.可以通過調(diào)節(jié)干擾上界γ0,收斂域半徑r和到達(dá)時(shí)間Tmax這3個(gè)參數(shù)實(shí)現(xiàn)長時(shí)間、高精度定點(diǎn)懸停.通過充足的仿真算例驗(yàn)證了本文算法的有效性.
1 動力學(xué)模型
1.1 軌道坐標(biāo)系定義
軌道坐標(biāo)系是指:原點(diǎn)位于航天器質(zhì)心;x軸沿地心指向航天器方向;y軸在軌道平面內(nèi)與x軸垂直,指向速度方向;z軸垂直于軌道平面,與x、y軸組成右手坐標(biāo)系.
1.2 相對軌道動力學(xué)模型
記目標(biāo)航天器為s,追蹤航天器為c.取建立在s上的軌道坐標(biāo)系作為相對運(yùn)動坐標(biāo)系,c與s的相對位置關(guān)系如圖1所示,其中OI-XIYIZI為地球慣性坐標(biāo)系.
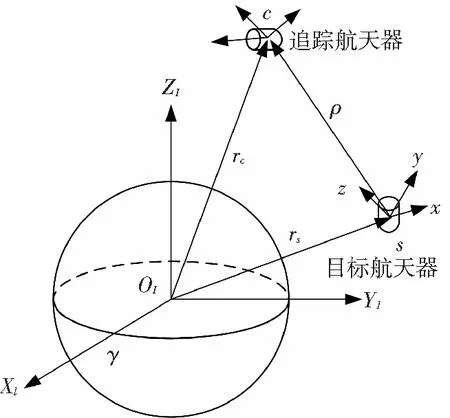
圖1 追蹤航天器與目標(biāo)航天器的相對位置關(guān)系
當(dāng)s運(yùn)行在近圓軌道上,且c與s距離較近時(shí),c在s的軌道坐標(biāo)系中的相對運(yùn)動可近似由C-W方程(又稱Hill方程)表示:
(1)

當(dāng)不考慮攝動力和控制力,即式(1)右邊全為0時(shí),式(1)為齊次微分方程組,可求得c相對s的位置r與速度v為
其中
2 固定時(shí)間穩(wěn)定懸停控制律設(shè)計(jì)
2.1 固定時(shí)間穩(wěn)定控制算法
文獻(xiàn)[17]基于固定時(shí)間穩(wěn)定的概念,給出了一種新型的有限時(shí)間控制算法,可以不依賴于系統(tǒng)初始狀態(tài),預(yù)先確定收斂時(shí)間,以下概括給出該算法的關(guān)鍵步驟和結(jié)論.
考慮如下存在不確定性的系統(tǒng):

(2)
式中:x∈Rn為狀態(tài)量;u∈Rm為控制量;函數(shù)f:R+×Rn→Rn用來描述系統(tǒng)的不確定性.假設(shè)式(2)滿足以下條件:1) 矩陣對(A,B)能控;2)f(t,x)滿足匹配條件f(t,x) =Bγ(t,x),且‖γ(t,x)‖ ≤ γ0(t,x).并定義Br= {x∈Rn:‖x‖∞≤ r}為系統(tǒng)狀態(tài)的目標(biāo)收斂域.
根據(jù)文獻(xiàn)[18],可通過變換y=Gx將原系統(tǒng)化為如下分塊形式:
(3)



(4)
其中αi, βi>0,i=1,…,k-1.
式(3)等價(jià)于
其中
對于式(3),將控制律設(shè)計(jì)成如下形式:
(5)
令ε, Tmax為正實(shí)數(shù),αi=1+‖Ai(i+1)‖∞,i=1,…,k-1,αk=ε+‖Ak(k+1)‖∞γ0(t,y)/ε;βi=q/ε2,i=1,…,k,q=[exp(2Tmax/k)-1]-1.根據(jù)文獻(xiàn)[17]可證明在控制律(5)作用下,當(dāng)t ≥Tmax時(shí),‖s(t)‖∞≤ε.
定義n-1次多項(xiàng)式的集合為Pn,可證明在式(5)的所有條件滿足時(shí),存在具有非負(fù)系數(shù)的多項(xiàng)式序列pi∈Pi,使得對?t>Tmax,‖yi(t)‖∞≤ pi(q)ε.pi(q)可通過數(shù)學(xué)軟件求得,比如:
(6)
為了進(jìn)一步得到原系統(tǒng)(2)的穩(wěn)定性,令
(7)
其中r>0,i=1,…,k-1.
(8)
式中r,Tmax>0,i=1,…,k.進(jìn)一步可以得到閉環(huán)系統(tǒng)狀態(tài)在時(shí)間Tmax內(nèi)收斂到目標(biāo)域Br內(nèi)[17].
2.2 懸停控制律設(shè)計(jì)


(9)
其中
根據(jù)懸停的要求,令期望狀態(tài)Xd=[xd,yd,zd,0,0,0]T,懸停誤差e=X-Xd,則可推出
(10)

可以發(fā)現(xiàn),式(10)直接滿足式(3)的形式,令y1由e中前3個(gè)分量組成,y2由e中后3個(gè)分量組成,有
(11)
其中
基于固定時(shí)間穩(wěn)定控制算法的固定時(shí)間穩(wěn)定基礎(chǔ)和懸停控制對象相關(guān)模型(9)~(11),本文給出如下形式的固定時(shí)間穩(wěn)定懸停控制律為
(12)
式中α2, β2, s2以及ξ(y1,y2)的定義如式(13)~(17)所示.
定理1 對式(1)描述的相對軌道模型系統(tǒng),在式(12)描述的控制律作用下,可以實(shí)現(xiàn)相對期望狀態(tài)Xd的懸停控制,且懸停誤差滿足固定時(shí)間穩(wěn)定.
證明 將式(11)中的模型參數(shù)矩陣A11和A12帶入式(6),可得
(13)
取控制參數(shù)r,Tmax,γ0>0,根據(jù)式(7)~ (8)得到相應(yīng)系數(shù):
(14)
結(jié)合式(14)求得的參數(shù),進(jìn)行式(4)所示的非線性變換,可以得到
(15)
進(jìn)一步,可以得到式(11)的等價(jià)系統(tǒng):
(16)
其中
(17)
式中yi(j)為yi中第j個(gè)元素.
將式(13)~(17)代入式(5),即可求得固定時(shí)間穩(wěn)定懸停控制律(12),根據(jù)固定時(shí)間穩(wěn)定控制算法的固定時(shí)間穩(wěn)定基礎(chǔ),可以得到控制律(12),即可以保證系統(tǒng)(9)的懸停誤差e是固定時(shí)間穩(wěn)定的,因此得到系統(tǒng)(1)的固定時(shí)間穩(wěn)定閉環(huán)懸停控制律.其中3個(gè)控制參數(shù)都有明確的物理意義,可根據(jù)實(shí)際控制需求進(jìn)行調(diào)節(jié):干擾上界γ0與空間攝動加速度大小有關(guān);收斂域半徑r與穩(wěn)定后的懸停精度有關(guān);到達(dá)時(shí)間Tmax預(yù)估達(dá)到穩(wěn)定狀態(tài)的過渡過程時(shí)間.
3 仿真算例
3.1 仿真參數(shù)
設(shè)目標(biāo)航天器處于600 km的太陽同步軌道,初始軌道根數(shù)為:半長軸a= 6 978 140 m,偏心率e= 0,軌道傾角i= 97.759 7°,升交點(diǎn)赤經(jīng)Ω= 0,近地點(diǎn)幅角ω=0,真近點(diǎn)角f=0;追蹤航天器懸停于目標(biāo)左后下方,期望狀態(tài)Xd= [-1 000 m, -100 m, 100 m, 0 m/s, 0 m/s, 0 m/s]T.為了便于仿真觀察,假設(shè)追蹤航天器由具有一定軌道傾角差的較低軌道已經(jīng)自由運(yùn)動到懸停位置,但具有一定的初始速度誤差,選取初始狀態(tài)為X0= [-1 000m, -100m, 100m, 0m/s, 0.54m/s, 0m/s]T.
控制律(12)的控制參數(shù)選取為Tmax=20,r=1,γ0=0.02.假設(shè)單軸最大控制加速度分量amax=0.1m/s2,當(dāng)某一坐標(biāo)軸控制加速度分量大于amax時(shí),取u = amax(u*/|u*|),u*為指令加速度.仿真時(shí)加入的軌道攝動包括:地球非球形攝動、大氣攝動、太陽光壓攝動和日月引力攝動等.
3.2 與PID懸停控制律對比仿真分析
懸停控制時(shí)間為目標(biāo)航天器一個(gè)軌道周期的仿真結(jié)果,如圖2~5所示.
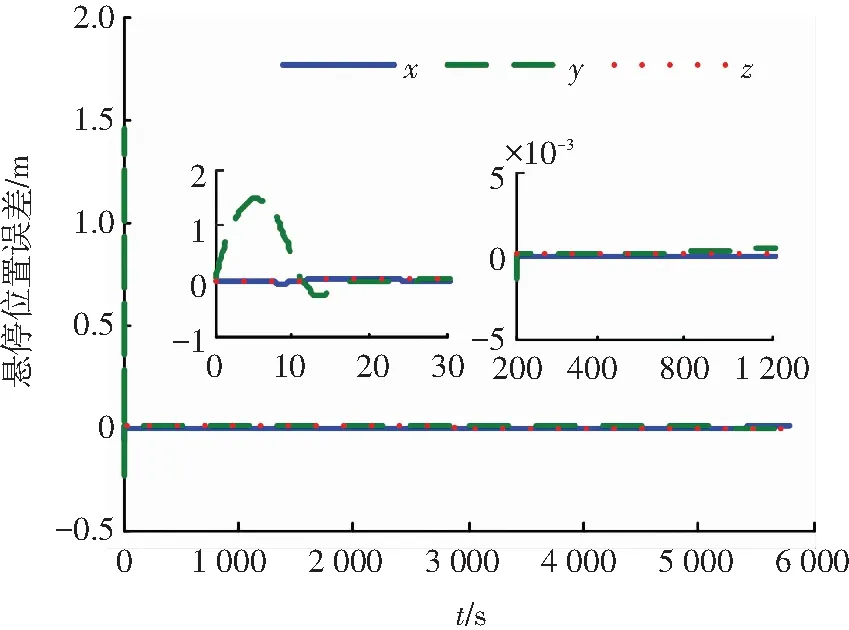
圖2 控制律(12)作用下懸停位置誤差變化曲線
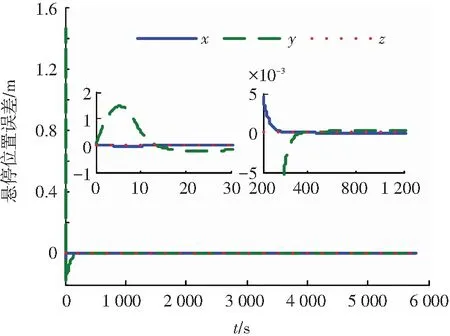
圖3 PID控制律作用下懸停位置誤差變化曲線
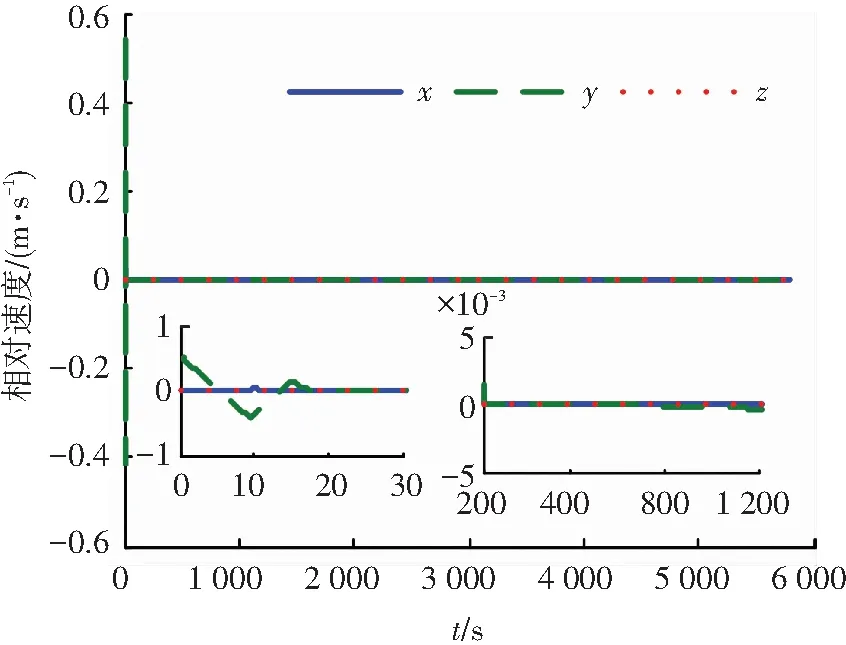
圖4 控制律(12)作用下相對速度變化曲線
從圖2可以看出,在控制律(12)作用下,經(jīng)過20s左右的過渡過程,追蹤航天器即可進(jìn)入并保持在懸停穩(wěn)定狀態(tài),且懸停誤差在±5×10-3m以內(nèi),表明控制律(12)具有較好的懸停控制精度.從圖3可以看出,在PID控制律作用下,需要200s左右的時(shí)間才可以達(dá)到±5×10-3m的懸停精度,因此過渡過程所需的時(shí)間遠(yuǎn)大于控制律(12)情況.通過圖4,5的對比,可以看出,在控制律(12)作用下,進(jìn)入懸停穩(wěn)定狀態(tài)時(shí)的相對速度遠(yuǎn)小于PID控制律情況,因此表明控制律(12)具有較好的懸停控制穩(wěn)定度.圖6,7分別是在控制律(12)作用下追蹤航天器的控制加速度曲線和所對應(yīng)的速度增量曲線,可以看出在整個(gè)懸停控制過程中控制加速度可以維持在4×10-3m/s2以內(nèi),速度增量可以維持在20m/s以內(nèi),表明控制律(12)具有較低的燃料消耗.
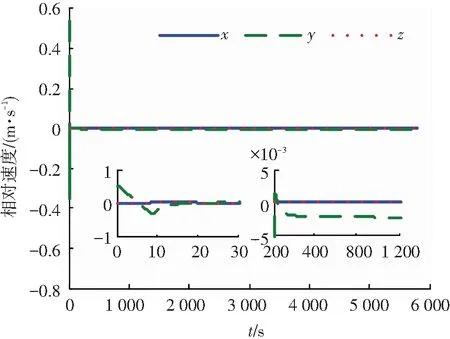
圖5 PID控制律作用下相對速度變化曲線
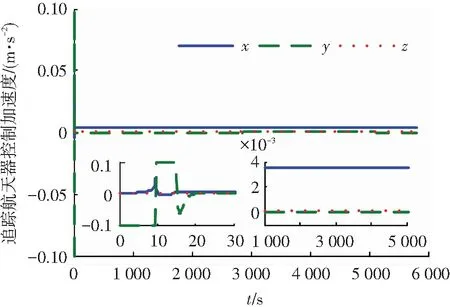
圖6 控制律(12)作用下追蹤航天器控制加速度變化曲線
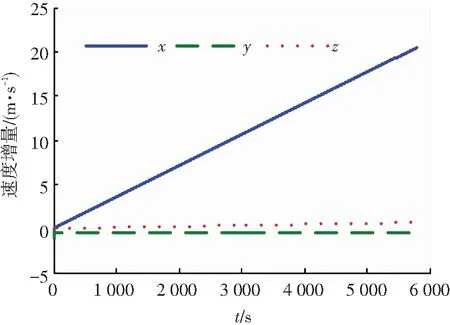
圖7 控制律(12)作用下控制加速度產(chǎn)生的速度增量變化曲線
圖6表明,控制律(12)在過渡過程中需要較大的控制加速度,懸停穩(wěn)定后各軸控制加速度分量為常值,與文獻(xiàn)[3]中給出的開環(huán)控制期間推力變化情況一致.圖7表明,控制律(12)一個(gè)軌道周期的懸停所需速度增量方面:x方向?yàn)?0.45m/s;y方向?yàn)?0.54m/s;z方向?yàn)?.68m/s.
3.3 控制參數(shù)選取分析
以下給出控制律(12)的控制參數(shù)選取的分析.其中控制律(12)的控制參數(shù)的標(biāo)稱值為Tmax=20,r=1,γ0= 0.02,表1~3分別給出當(dāng)其中一個(gè)控制參數(shù)變化,另外兩個(gè)控制參數(shù)不變情況下的控制性能.被統(tǒng)計(jì)的控制性能包括收斂時(shí)間tc、懸停精度(一個(gè)軌道周期內(nèi)的相對位置誤差幅值) pm和懸停穩(wěn)定度(一個(gè)軌道周期內(nèi)的相對速度誤差幅值) vm.
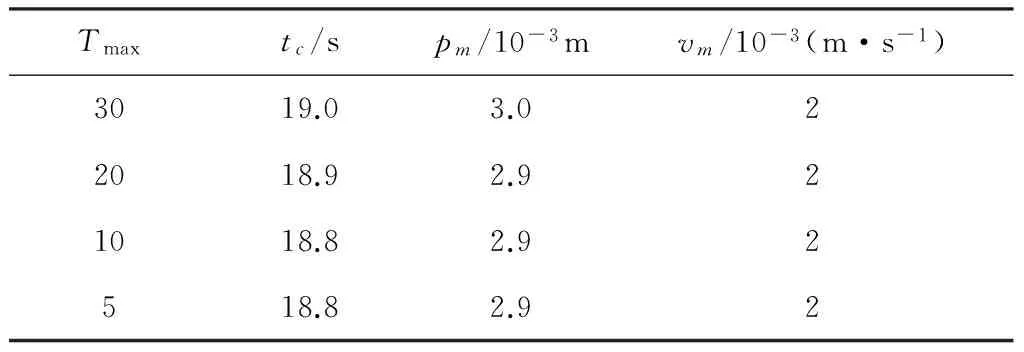
表1 Tmax變化時(shí)的控制性能情況
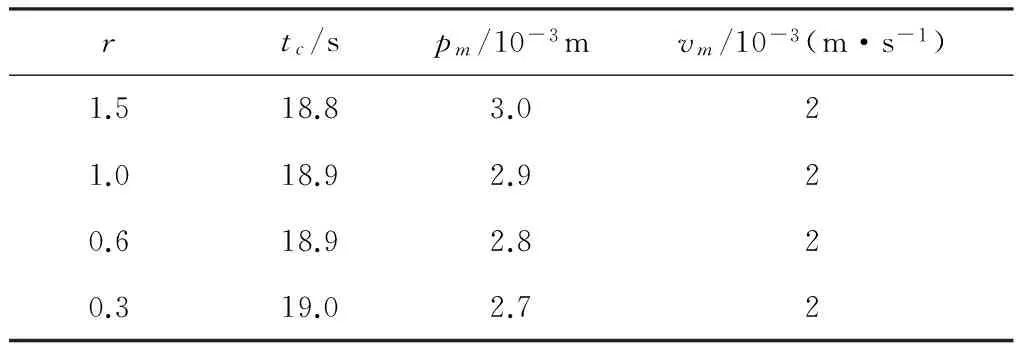
表2 r變化時(shí)的控制性能情況
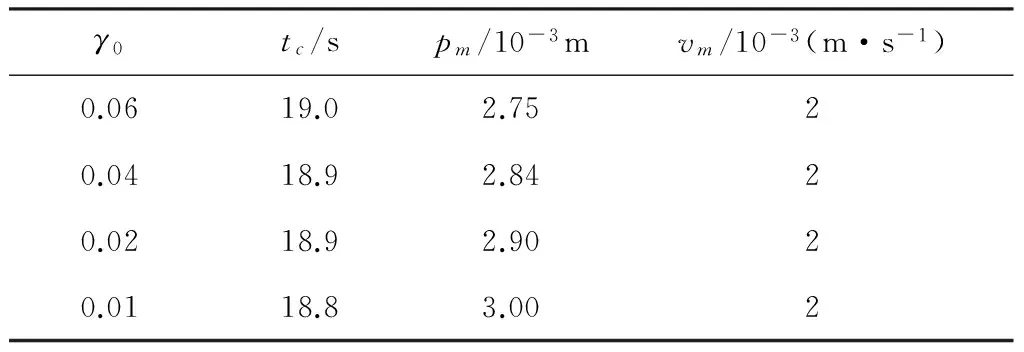
表3 γ0變化時(shí)的控制性能情況
通過表1可以看出,當(dāng)Tmax逐漸減小時(shí),tc和pm有逐漸減小的趨勢,vm保持不變.通過表2可以看出,當(dāng)r逐漸減小時(shí),tc有逐漸增大的趨勢,pm有逐漸減小的趨勢,vm保持不變.通過表3可以看出,當(dāng)γ0逐漸減小時(shí),tc有逐漸減小的趨勢,pm有逐漸增大的趨勢,vm保持不變.通過對表1~3的分析,可以得出:1)為了達(dá)到減小收斂時(shí)間的目的,可以通過縮小Tmax和γ0,增大r的方式實(shí)現(xiàn); 2)為了達(dá)到提高懸停精度的目的,可以通過縮小Tmax和r,增大γ0的方式實(shí)現(xiàn); 3)通過調(diào)整Tmax、r和γ0等控制參數(shù),一般對懸停穩(wěn)定度影響不大.
4 結(jié) 論
1)本文基于固定時(shí)間穩(wěn)定理論,設(shè)計(jì)了一種閉環(huán)懸停控制律.通過調(diào)節(jié)干擾上界γ0,收斂域半徑r和到達(dá)時(shí)間Tmax這3個(gè)參數(shù)來適應(yīng)不同的控制需求,能夠有效地解決開環(huán)控制律的誤差發(fā)散問題和常規(guī)閉環(huán)控制律的響應(yīng)速度較慢問題.
2)對初始狀態(tài)誤差和攝動干擾等具有較好的魯棒性. 能夠在有限時(shí)間內(nèi)讓閉環(huán)系統(tǒng)快速進(jìn)入懸停誤差收斂狀態(tài),實(shí)現(xiàn)長時(shí)間、高精度定點(diǎn)懸停.
[1] 袁建平, 朱戰(zhàn)霞.空間操作與非開普勒運(yùn)動[J]. 宇航學(xué)報(bào), 2009, 30(1):42-46.
[2] 林來興, 黎康. 衛(wèi)星對空間目標(biāo)懸停的軌道動力學(xué)與控制方法研究[J]. 中國空間科學(xué)技術(shù), 2008, 28(1):9-12.
[3] 閆野. 衛(wèi)星相對空間目標(biāo)任意位置懸停的方法研究[J]. 中國空間科學(xué)技術(shù), 2009, 29(1):1-5.
[4] BROSCHART S B, SCHEERES D J. Control of hovering spacecraft near small bodies: application to asteroid 25143 itokawa [J]. Journal of Guidance, Control, and Dynamics, 2005, 28(2): 343-354.
[5] SAWAI S, SCHEERES D J, BROSCHART S B. Control of hovering spacecraft using altimetry[J]. Journal of Guidance Control and Dynamics, 2002, 25(4):786-795.
[6] BROSCHART S B, SCHEERES D J. Boundedness of spacecraft hovering under dead-band control in time-invariant systems[J]. Journal of Guidance Control and Dynamics, 2007, 30(2):601-610.
[7] LU E T, LOVE S G. A Gravitational tractor for towing asteroids[J]. Nature, 2005, 438(11):177-178.
[8] WIE Bong. Dynamics and control of gravity tractor spacecraft for asteroid deflection[J]. Journal of Guidance Control and Dynamics, 2008, 31(5):1413-1423.
[9] WIE Bong. Hovering control of a solar sail gravity tractor spacecraft for asteroid deflection[C]//Proceedings of the 2007 Planetary Defense Conference. Washington, D.C: IEEE, 2007:145-150.
[10]閆野, 朱亞文. 非圓軌道衛(wèi)星實(shí)現(xiàn)共面懸停的方法[J]. 中國空間科學(xué)技術(shù), 2010(2):42-48.
[11]朱亞文, 閆野. 橢圓軌道衛(wèi)星空間任意位置懸停的方法[J]. 中國空間科學(xué)技術(shù), 2010(6):17-23.
[12]王功波, 孟云鶴, 鄭偉, 等. 基于軌道動力學(xué)的橢圓軌道懸停方法[J]. 宇航學(xué)報(bào), 2010(6):1527-1532.
[13]薛白, 佘志坤, 余婧, 等. 基于混雜系統(tǒng)的空間飛行器懸停控制[J]. 中國空間科學(xué)技術(shù), 2010(2):61-67.
[14]段廣仁, 譚峰, 張世杰, 等. 衛(wèi)星軌跡跟蹤控制的參數(shù)化方法[J]. 空間控制技術(shù)與應(yīng)用, 2008, 34(5):3-7.
[15]付艷明, 李偉, 段廣仁. 基于T-H方程的衛(wèi)星軌跡模型參考輸出跟蹤控制方法[J]. 宇航學(xué)報(bào), 2013, 34(4):496-502.
[16]丁世宏, 李世華. 有限時(shí)間控制問題綜述[J]. 控制與決策, 2011, 26(2):161-169.
[17]POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110.
[18]DRAKUNOV S V, IZOSIMOV D B, LUKYANOV A G. The block control principle[J]. Automation and Remote Control, 1990, 51(5): 601-608.
(編輯 張 紅)
Hovering control for spacecraft in relative orbit based on fixed-time stabilization theory
SUN Yanchao, ZHAO Wenrui, LI Chuanjiang, LI Dongyu, MA Guangfu
(School of Astronautics, Harbin Institute of Technology, 150001 Harbin, China)
Based on fixed-time stabilization theory, a new hovering control strategy for spacecraft in relative orbit is investigated. First, the mathematical description of the fixed-time stabilization theory is introduced. Then, the hovering control law is proposed by utilizing C-W equation. The control effects can be adjusted to desired states in which the spacecraft hovers stably and precisely in finite time by regulating the values of corresponding parameters. Numerical simulation results are provided to validate the performance of the proposed control law.
hovering control; fixed-time stabilization; relative orbit; closed loop control; relative orbit control
10.11918/j.issn.0367-6234.2016.04.004
2014-11-20.
國家自然科學(xué)基金(61304005, 61174200);高等學(xué)校博士學(xué)科點(diǎn)專項(xiàng)科研基金(20102302110031).
孫延超(1987—),男,博士研究生;
李傳江(1978—),男,教授,博士生導(dǎo)師;
馬廣富, magf@hit.edu.cn.
V448.2
A
0367-6234(2016)04-0026-06
馬廣富(1963—),男,教授,博士生導(dǎo)師.