基于CPLD的TRUM相電壓平衡控制的研究
2016-11-30 02:17:34孫鶴旭李國(guó)慶
微特電機(jī) 2016年2期
關(guān)鍵詞:信號(hào)
孫鶴旭,荊 鍇,李國(guó)慶,董 硯
(1.河北工業(yè)大學(xué),天津 300130;2.河北科技大學(xué),石家莊 050018)
?
基于CPLD的TRUM相電壓平衡控制的研究
孫鶴旭1, 2,荊 鍇1,李國(guó)慶1,董 硯1
(1.河北工業(yè)大學(xué),天津 300130;2.河北科技大學(xué),石家莊 050018)
針對(duì)行波型旋轉(zhuǎn)超聲電機(jī)兩相參數(shù)不對(duì)稱帶來(lái)的兩相電壓不平衡的現(xiàn)象進(jìn)行了深入研究。在H橋式電路驅(qū)動(dòng)下,以電機(jī)輸入LC電路為研究模型,理論分析了輸入方波電壓占空比與諧振輸出電壓間的關(guān)系,并設(shè)計(jì)了以CPLD為核心的控制邏輯,實(shí)現(xiàn)了對(duì)行波型旋轉(zhuǎn)超聲電機(jī)的驅(qū)動(dòng)電壓平衡控制。最后通過(guò)對(duì)比實(shí)驗(yàn),對(duì)兩相電壓對(duì)電機(jī)轉(zhuǎn)速轉(zhuǎn)矩的影響進(jìn)行了驗(yàn)證。
行波型旋轉(zhuǎn)超聲電機(jī);兩相電壓;LC電路;占空比;CPLD
0 引 言
行波型旋轉(zhuǎn)超聲波電動(dòng)機(jī)(以下簡(jiǎn)稱TRUM)不同于傳統(tǒng)電磁電機(jī),它通過(guò)壓電陶瓷激發(fā)定子彈性體的高頻微幅振動(dòng),依靠摩擦來(lái)驅(qū)動(dòng)轉(zhuǎn)子[1]。這一類電機(jī)具有低噪聲運(yùn)行、轉(zhuǎn)矩密度大、瞬態(tài)響應(yīng)快、無(wú)電磁干擾、位置分辨率高等特點(diǎn),在高端精密運(yùn)動(dòng)控制中應(yīng)用前景廣闊[2]。TRUM的運(yùn)行是由兩相互差90°的高頻正弦電壓驅(qū)動(dòng)的,其驅(qū)動(dòng)電壓信號(hào)通常由推挽式或H橋式驅(qū)動(dòng)電路輸出脈寬的方波經(jīng)升壓及LC諧振得到[3-4]。然而,受TRUM兩相壓電陶瓷材料選取、制造工藝存在差異以及LC諧振電路參數(shù)的偏差的影響,兩相輸入電壓往往無(wú)法達(dá)到平衡,從而導(dǎo)致電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩波動(dòng)大,影響運(yùn)行效率,嚴(yán)重時(shí)還可能損壞電機(jī)。文獻(xiàn)[5]提出以Boost升壓電路作為兩相驅(qū)動(dòng)的供電電源,以調(diào)節(jié)兩相電壓;文獻(xiàn)[6]提出電壓閉環(huán)的控制方式,動(dòng)態(tài)調(diào)整TRUM的兩相電壓。但閉環(huán)的控制方式應(yīng)用于高頻信號(hào)時(shí)很難滿足其動(dòng)態(tài)性能,因此并不能獲得良好的調(diào)節(jié)效果。另外,上述方法均增加了驅(qū)動(dòng)器的硬件結(jié)構(gòu),不利于電機(jī)控制器的小型化設(shè)計(jì)。
本文基于H橋式驅(qū)動(dòng)電路,研究輸出方波信號(hào)與電機(jī)輸入電壓間的響應(yīng)關(guān)系,給出兩相參數(shù)不對(duì)稱的情況下,平衡兩相相電壓方波信號(hào)的計(jì)算方法,并采用CPLD實(shí)現(xiàn)TRUM兩相電壓平衡的開(kāi)環(huán)控制,以簡(jiǎn)化控制結(jié)構(gòu)。最后通過(guò)實(shí)驗(yàn)對(duì)電壓輸出和電機(jī)性能進(jìn)行驗(yàn)證。
1 H橋驅(qū)動(dòng)電路
TRUM的H橋驅(qū)動(dòng)電路如圖 1所示,兩相分別由一個(gè)H橋電路連接升壓變壓器及串聯(lián)電感構(gòu)成。

圖1 TRUM H橋驅(qū)動(dòng)電路
電路中直流母線Udc恒定,輸入開(kāi)關(guān)管的控制信號(hào)均滿足上下橋臂互反且占空比均為50%。圖 2中示出了兩個(gè)H橋上橋臂驅(qū)動(dòng)信號(hào)波形以及H橋輸出電壓uo1,uo2波形。
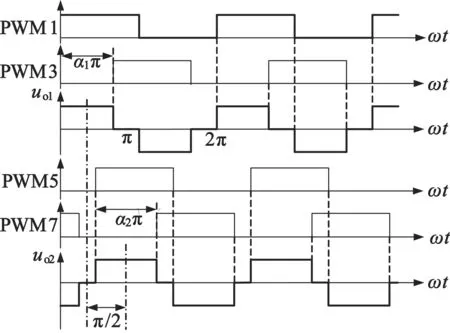
圖2 H橋PWM控制信號(hào)及輸出電壓
定義輸出電壓的占空比為其正(負(fù))電平持續(xù)時(shí)長(zhǎng)與半個(gè)周期的比值,即圖中的α1,α2,兩相的占空比可通過(guò)調(diào)節(jié)各相PWM的相位差來(lái)實(shí)現(xiàn)。控制中通常還要保證兩相輸出電壓正(負(fù))電平的中心軸線互差π/2。
2 LC模型下的TRUM相電壓平衡分析
TRUM壓電振子可用圖 3中虛線框中等效電路表示,通常在諧振工作點(diǎn)出串聯(lián)支路阻抗較大,電機(jī)對(duì)外表現(xiàn)為容性,在分析驅(qū)動(dòng)電壓時(shí)可忽略其串聯(lián)支路[7],簡(jiǎn)化為右圖結(jié)構(gòu),驅(qū)動(dòng)電路中的串聯(lián)電感L則與一相壓電振子等效電容C構(gòu)成一個(gè)LC諧振網(wǎng)絡(luò)。
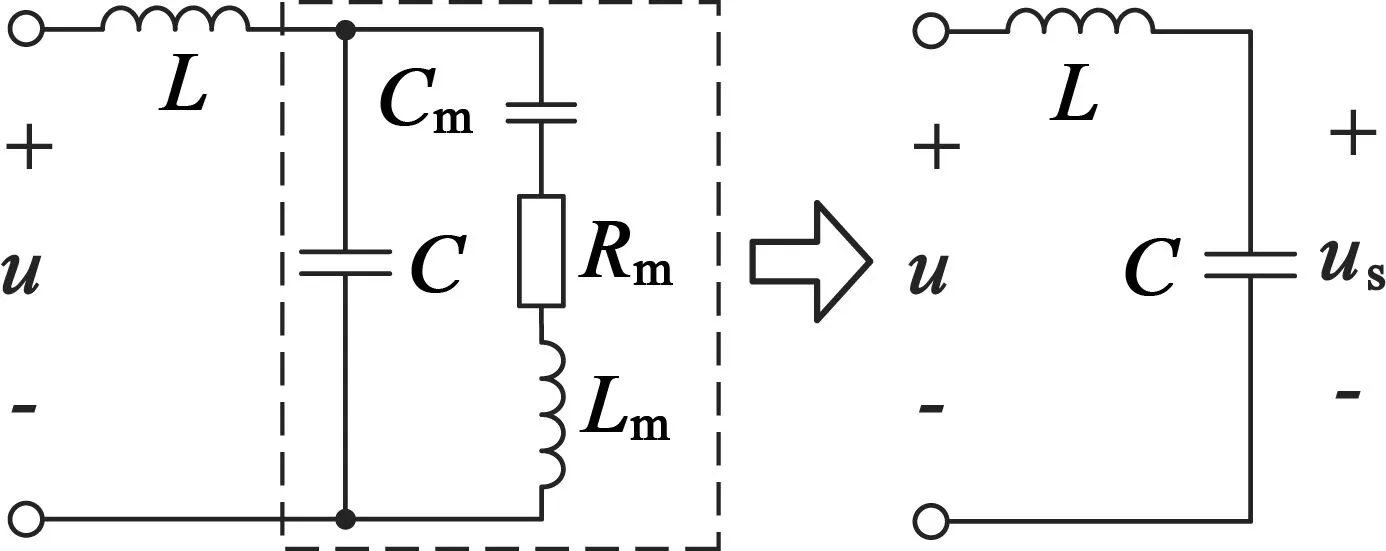
圖3 TRUM簡(jiǎn)化等效電路
升壓變壓器TA,TB輸出與H橋同型的方波電壓,取歸一化的軸對(duì)稱方波信號(hào):
(1)
α為占空比。由于該函數(shù)為偶函數(shù),其傅里葉展開(kāi)只包含余弦項(xiàng):
(2)
(3)
在實(shí)際中,受壓電陶瓷材料及制造工藝的影響,電機(jī)兩相輸入等效電容并不一致,并且,繞制串聯(lián)電感時(shí),其電感值也很難做到與期望完全一致。文中所使用的TRUM-60型電機(jī),經(jīng)導(dǎo)納圓參數(shù)辨識(shí),可得A,B兩相的靜態(tài)電容分別為C1=8.748nF,C2=7.400nF;兩相串聯(lián)電感分別為L(zhǎng)1=756.7μH、L2=775.4μH。這樣,TRUM兩相電壓幅值的基波分量與40kHz工作頻率下的方波占空比間的關(guān)系曲線如圖 4所示。
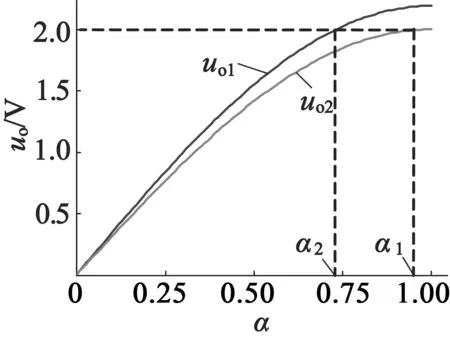
圖4 兩相電壓幅值響應(yīng)與占空比的關(guān)系曲線
于是要想獲得等幅值輸出的驅(qū)動(dòng)電壓,α1,α2存在較大差異。對(duì)于以上的電機(jī)參數(shù),當(dāng)B相的α2= 95%時(shí),若獲得同樣大小的輸出電壓,A相α1= 73%,諧振放大倍數(shù)約2倍。當(dāng)Udc為20V,升壓變壓器變比為1∶5,則獲得的電機(jī)兩端的電壓為200V。
3 基于CPLD的TRUM相電壓平衡控制的實(shí)現(xiàn)
控制器硬件結(jié)構(gòu)如圖 5所示,以CPLD為核心,結(jié)合H橋驅(qū)動(dòng)芯片HIP4081A產(chǎn)生所需的8路PWM。
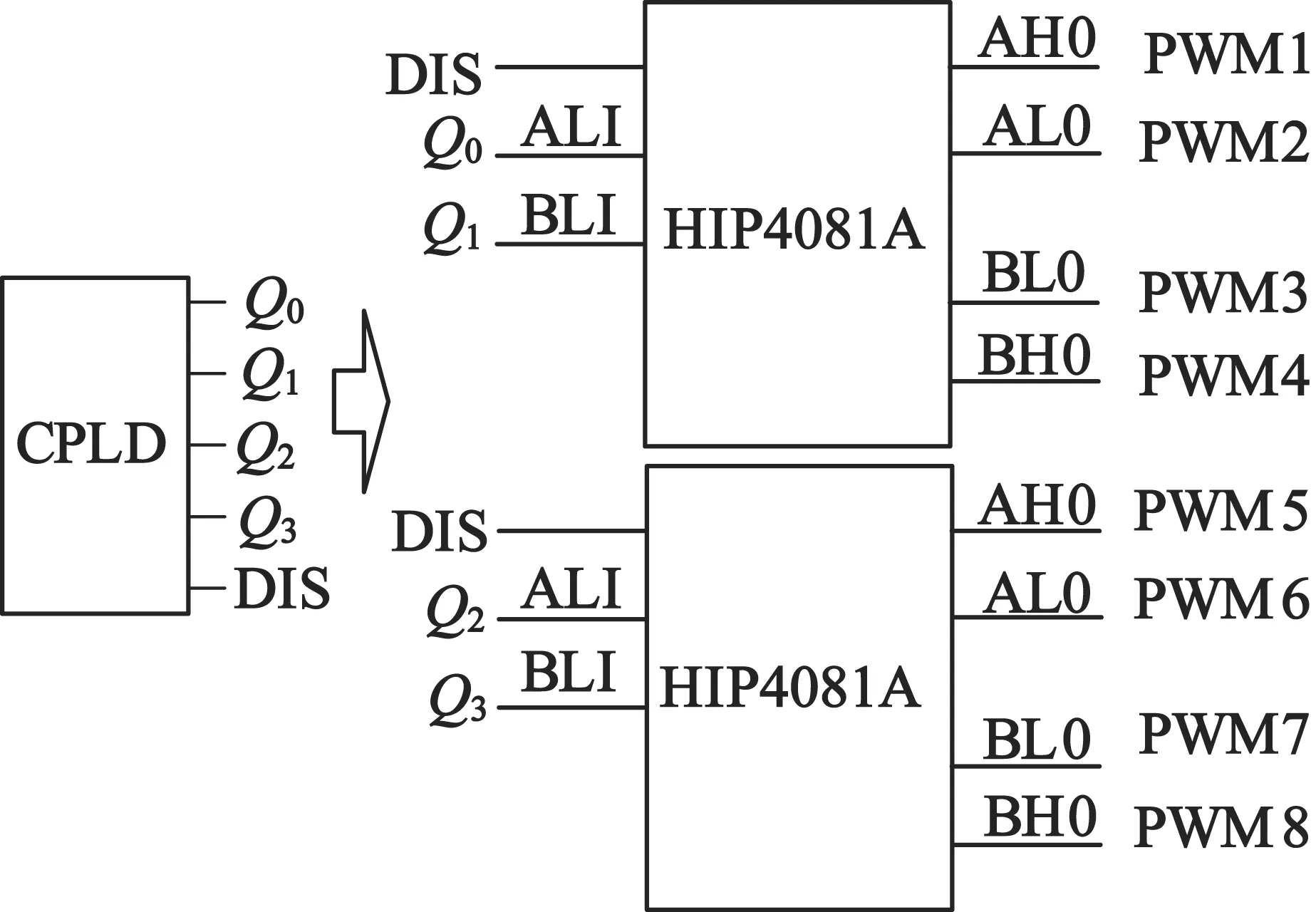
圖5 CPLD控制器硬件結(jié)構(gòu)框圖
圖5中,CPLD輸出的Q0~Q3對(duì)應(yīng)于圖中的四個(gè)上橋臂PWM信號(hào)。PWM信號(hào)采用周期計(jì)數(shù)比較的控制邏輯予以實(shí)現(xiàn),如圖 6所示。
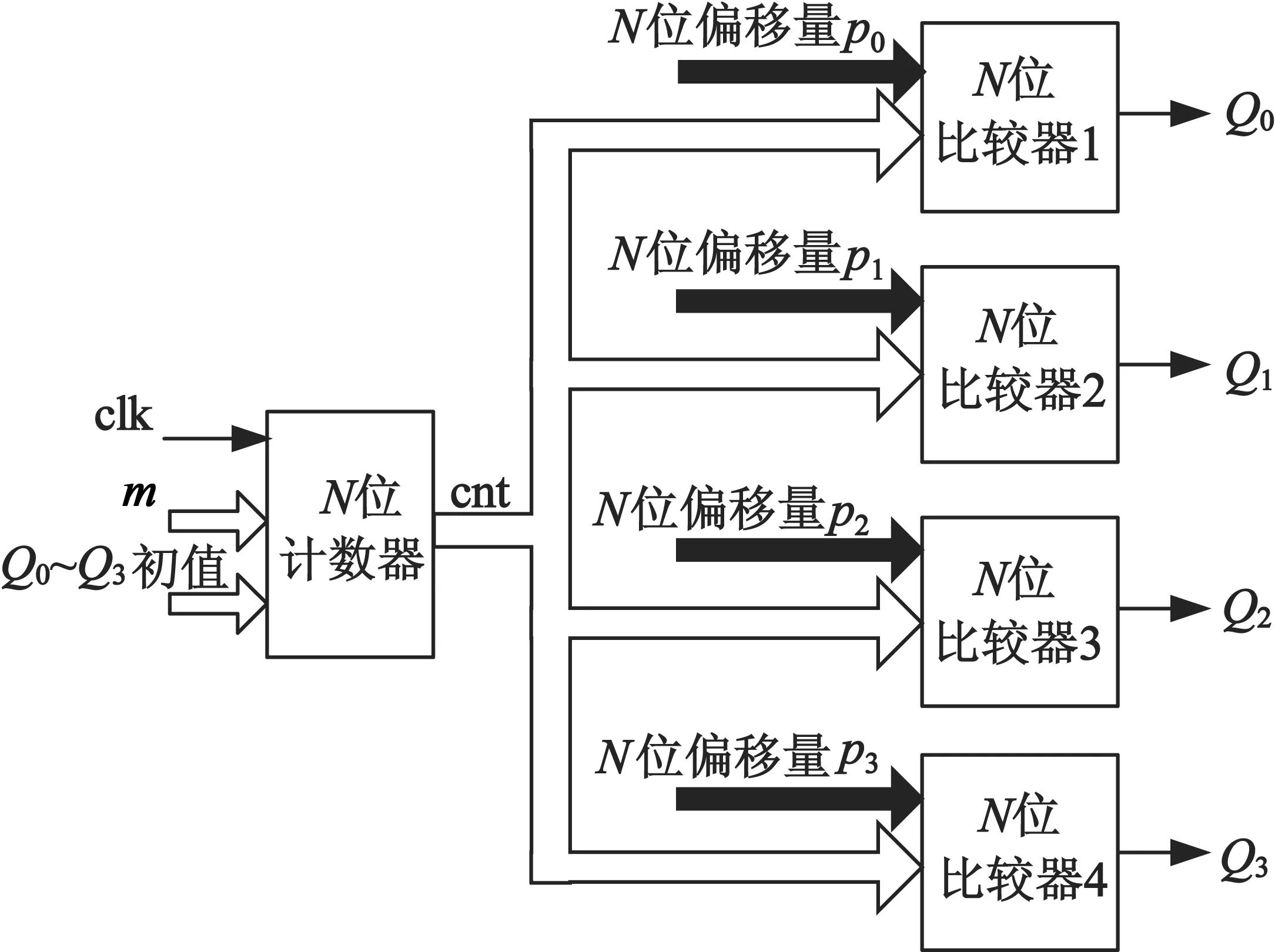
圖6 PWM信號(hào)生成的CPLD邏輯框圖
(4)
通常取p0= 0,則可通過(guò)代入兩相電壓平衡所得的占空比,得到偏移量,從而根據(jù)控制邏輯輸出PWM控制信號(hào)控制H橋,使得TRUM的兩相驅(qū)動(dòng)電壓一致。
4 實(shí)驗(yàn)驗(yàn)證
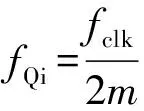
根據(jù)上述分析,對(duì)兩相電壓平衡進(jìn)行對(duì)比試驗(yàn)驗(yàn)證。CPLD時(shí)鐘頻率fclk= 40MHz,工作頻率fQ=40kHz。當(dāng)占空比按上節(jié)計(jì)算得到的α1= 73%,α2= 95%,根據(jù)式(4)可得:p0=0,p1=135,p2=305,p0=330。實(shí)驗(yàn)中與占空比為1情況進(jìn)行對(duì)比,首先,CPLD輸出的PWM信號(hào)仿真如圖 7所示,圖7中左側(cè)為占空比1時(shí)的PWM信號(hào),右側(cè)為取α1=73%,α2=95%時(shí)的PWM信號(hào)。
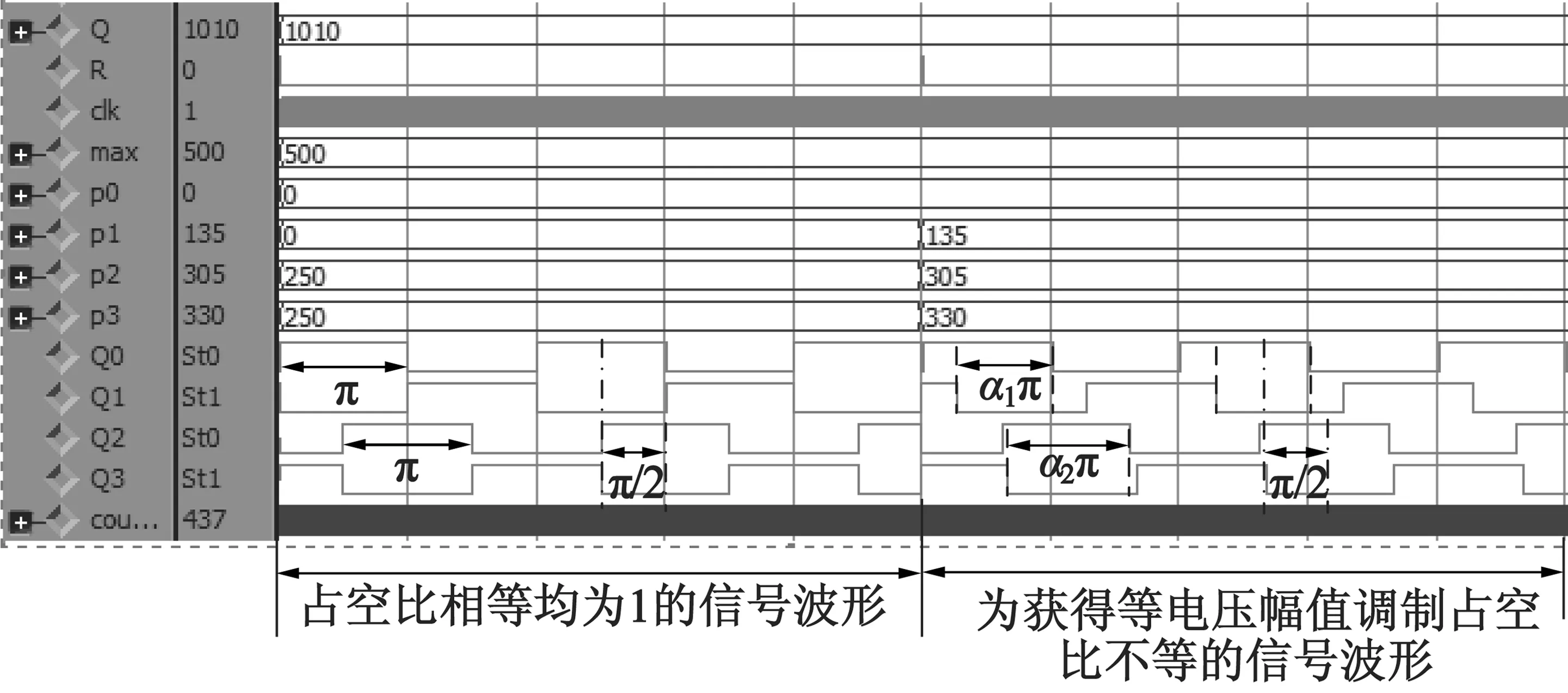
圖7 CPLD信號(hào)仿真圖
以下的對(duì)比實(shí)驗(yàn)均基于上述的兩種PWM控制信號(hào)。當(dāng)控制信號(hào)由CPLD輸出,經(jīng)驅(qū)動(dòng)電路作用于TRUM,最后經(jīng)LC諧振獲得的兩相輸入電壓如圖 8所示。
由實(shí)驗(yàn)可得,圖 8(a)為兩相電壓不平衡,A相電壓峰值約230V,B相電壓峰值約208V;圖 8(b)兩相電壓基本一致,峰值約為225V。
(a)占空比均為1時(shí)的電機(jī)兩相電壓波形(b)占空比不等的兩相平衡電壓波形
圖8 電壓波形對(duì)比圖
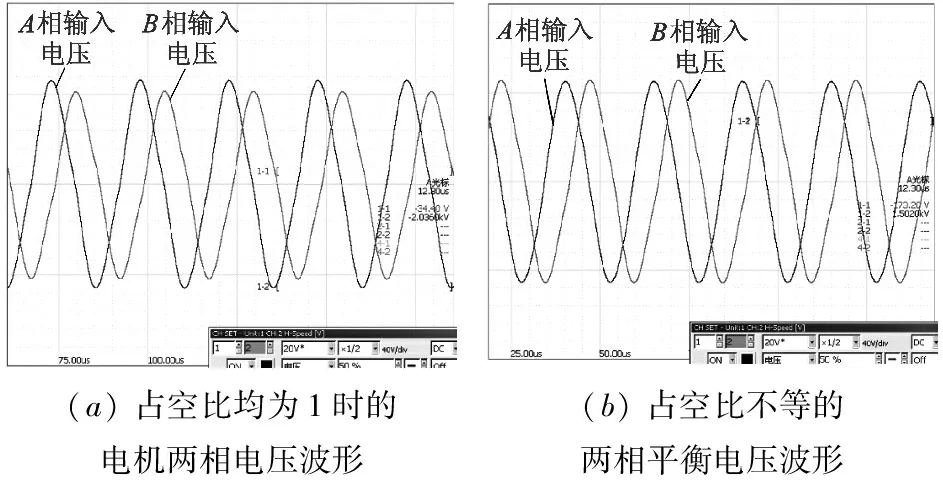
在上述兩種驅(qū)動(dòng)情形下,給電機(jī)加載恒定負(fù)載轉(zhuǎn)矩,調(diào)節(jié)電機(jī)以同樣的平均轉(zhuǎn)速運(yùn)行,獲得其輸出轉(zhuǎn)矩和轉(zhuǎn)速曲線,如圖 9所示。

(a) 兩相電壓不平衡時(shí)電機(jī)輸出轉(zhuǎn)矩和轉(zhuǎn)速
(b) 兩相電壓平衡時(shí)電機(jī)輸出轉(zhuǎn)矩和轉(zhuǎn)速
圖 9(a)為兩相電壓不平衡情況下的輸出轉(zhuǎn)矩和轉(zhuǎn)速曲線,平均轉(zhuǎn)速68.89 r/min,平均轉(zhuǎn)矩0.429 9 N·m,轉(zhuǎn)矩和轉(zhuǎn)速的均方誤差分別為0.002 095 (N·m)2,13.89 (r/min)2;圖 9(b)為經(jīng)調(diào)整占空比,兩相電壓平衡后的輸出轉(zhuǎn)矩和轉(zhuǎn)速曲線,平均轉(zhuǎn)速67.85 r/min,平均轉(zhuǎn)矩0.433 5 N·m,轉(zhuǎn)矩和轉(zhuǎn)速的均方誤差分別為0.001 186(N·m)2,7.209(r/min)2。與前者相比,轉(zhuǎn)速和轉(zhuǎn)矩的波動(dòng)有所減小,故兩相電壓平衡有效地降低了電機(jī)轉(zhuǎn)矩和轉(zhuǎn)速的脈動(dòng),使電機(jī)運(yùn)行更加平穩(wěn)。
5 結(jié) 語(yǔ)
本文針對(duì)H橋式驅(qū)動(dòng)電路對(duì)TRUM兩相輸入電壓平衡問(wèn)題進(jìn)行了研究,以簡(jiǎn)化的等效電路分析了H橋輸出方波電壓的占空比與LC諧振輸出電壓的關(guān)系,并據(jù)此對(duì)兩相電壓平衡時(shí)的占空比進(jìn)行了求解。文中還以CPLD為核心設(shè)計(jì)了占空比可控的PWM控制邏輯,并根據(jù)兩相電壓平衡時(shí)的占空比計(jì)算控制邏輯所需的偏移量。最后通過(guò)實(shí)驗(yàn)對(duì)比了常用恒定占空比下兩相電壓不平衡及調(diào)節(jié)后兩相電壓平衡情況下的電壓及輸出轉(zhuǎn)矩、轉(zhuǎn)速的波形,驗(yàn)證了本文控制策略對(duì)平衡驅(qū)動(dòng)電壓確保電機(jī)平穩(wěn)運(yùn)行的有益效果。
[1] 趙淳生. 超聲電機(jī)技術(shù)與應(yīng)用[M]. 北京: 科學(xué)出版社. 2007.
[2] 李搖霞, 張搖寧, 高搖琳, 等. 超聲諧波電動(dòng)機(jī)的設(shè)計(jì)與分析[J].微特電機(jī),2015, 43(5): 9-13.
[3] YAN Jiajia,RUAN Xinbo.A soft switching driving circuit for ultrasonic motor[C]//IEEE Power Electronics Specialists Conference,2007:559 - 562.
[4] 皮文苑, 鹿存躍, 楊明. 基于NuMicro M0516的超聲波電動(dòng)機(jī)驅(qū)動(dòng)電路設(shè)計(jì)[J].微特電機(jī),2012,40(4):68-70.
[5] 史敬灼.調(diào)頻調(diào)幅調(diào)相的超聲波電機(jī)控制電路[J].微特電機(jī),2008,36(1):46-49.
[6] 王海彥,史敬灼.二相行波超聲波電機(jī)的電壓閉環(huán)控制[J].電機(jī)與控制應(yīng)用,2009,36(12):14-16.
[7] 李華峰,趙淳生.基于LC諧振的超聲電機(jī)驅(qū)動(dòng)器的研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2005,25(23):144-148.
Research for the Phase Voltage Balance Control of TRUM Based on CPLD
SUN He-xu1,2, JING Kai1, LI Guo-qing1, DONG Yan1
(1.Hebei University of Technology,Tianjin 300130,China;2.Hebei University of Science and Technology,Shijiazhuang 050018,China)
The imbalance of the two phase voltage of travelling-wave type rotary ultrasonic motors was studied, which is caused by the asymmetry of the two phases. A theoretical analysis of the phase voltage was done by the LC circuit model to deduce the relationship of the duty cycle of the square wave input voltage and the resonant output voltage, which was under the driving of H-bridge circuit. A control-logic was also designed in CPLD to implement the balance of the two phase voltage. The contrast experiments were completed to testify the effects of the two phase voltage on the speed and torque of the motor.
travelling-wave type rotary ultrasonic motors (TRUM); two phase voltage; LC circuit; duty cycle; CPLD
2015-07-20
河北省自然科學(xué)基金項(xiàng)目(E2013202108);河北省重大科技成果轉(zhuǎn)化項(xiàng)目(13041709Z);河北省研究生創(chuàng)新資助項(xiàng)目(2015)
TM359.9
A
1004-7018(2016)02-0080-04
孫鶴旭(1956-),男,教授,博士生導(dǎo)師,研究方向?yàn)檫\(yùn)動(dòng)控制、工程系統(tǒng)與控制。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06