基于電流滯環的開關磁阻電動機控制方法
2016-11-30 02:17:33程寧寧趙德勇王永生
微特電機 2016年2期
黃 輝,程寧寧,胡 楊,趙德勇,汪 磊,王永生
(1.合肥工業大學,合肥 230009;2.國網安徽省電力公司 宣城供電公司,宣城 242000)
?
基于電流滯環的開關磁阻電動機控制方法
黃 輝1,程寧寧2,胡 楊1,趙德勇1,汪 磊1,王永生1
(1.合肥工業大學,合肥 230009;2.國網安徽省電力公司 宣城供電公司,宣城 242000)
在開關磁阻電動機系統中電流斬波控制和角位置控制是最常用的主要有兩種控制方式。介紹了一種電流內環采用滯環控制的開關磁阻電動機控制方法。通過設定滯環環寬,將電機相電流控制在給定電流上、下一個環寬內,這樣既可及時迅速地跟蹤給定的電流,避免電機起動過程中的電流過大現象,又能快速地響應外環轉速的變化,實現快速穩定的控制電機。內環采用新型的滯環電流控制后,簡單有效地解決了傳統控制策略中電流斬波動態響應慢、角位置控制復雜的弊端。
開關磁阻電動機;電流滯環;控制策略
0 引 言
開關磁阻電動機控制系統兼具傳統交、直流調速系統各自的優點,是繼交流變頻調速系統、直流無刷電機調速系統后的一種新型無級調速系統[1]。開關磁阻電動機(以下簡稱SRM)的定子和轉子都是凸極形式,轉子上既無繞組又無永磁體,通過硅鋼片疊壓而成,繞有簡單的集中式繞組的疊壓而成硅鋼片構成了定子。因此,SRM在結構上具有簡單牢固的特性,運行可靠、維護方便,對環境要求低且成本低廉;控制上具有較廣調速范圍、較大的起動轉矩、較小的起動電流等,這些優勢決定了SRM在各個領域都有著廣泛的運用。
SRM的控制策略大多采用角位置控制和電流斬波控制[2]。角位置控制不足之處在于低速性能不好,當轉速減小時,感應電動勢會因為電感的變化而減少,因此電流的峰值會增大,需要進行限流處理。角位置控制過程中,開關元器件在導通期間會一直處于導通狀態,相電流大小是不可以調控的,相應的電流變化率很大,對開通角和關斷角的變化影響較大,同樣在控制上存在一定的困難。同時,針對轉速與轉矩所確定的某一運行時刻,開通角和關斷角的組合形式是多種多樣,不同的組合形式對應著不同的特性,具體控制起來相對復雜,且結果很難達到預定的效果。因此,角位置控制更適合在短時間內電流快速達到給定值[3-5]。
對于電流斬波控制,電流是鋸齒狀,當速度降低時,功率開關器件的開關頻率將會隨之增大,轉矩脈動也會隨著增大,造成的振動與噪聲也會變得嚴重。除此之外,還存在著動態響應慢的問題,輸出轉矩因電流限幅而受限,無法快速的響應擾動帶來的轉速突變[6-7]。
本文介紹一種電流內環采用滯環控制的SRM控制方法。這種控制方式具有以下優勢:1)起動時能限流起動,減小由于起動電流過大對控制器及電機造成的沖擊;2)縮短了起動、停車時間,起動時采用大電流起動,停車時同樣也采用大電流停車;這樣實現了快速的起動、停車; 3)采用內環電流滯環后,使得電機相電流能夠快速地跟隨電流給定值,可以得到平穩的電流波形,電流平穩,縮小控制器的容量,提高電機的效率;4)有效地降低SRM的噪聲。
1 數學模型
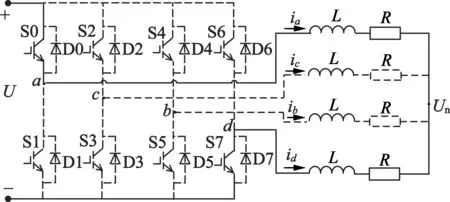
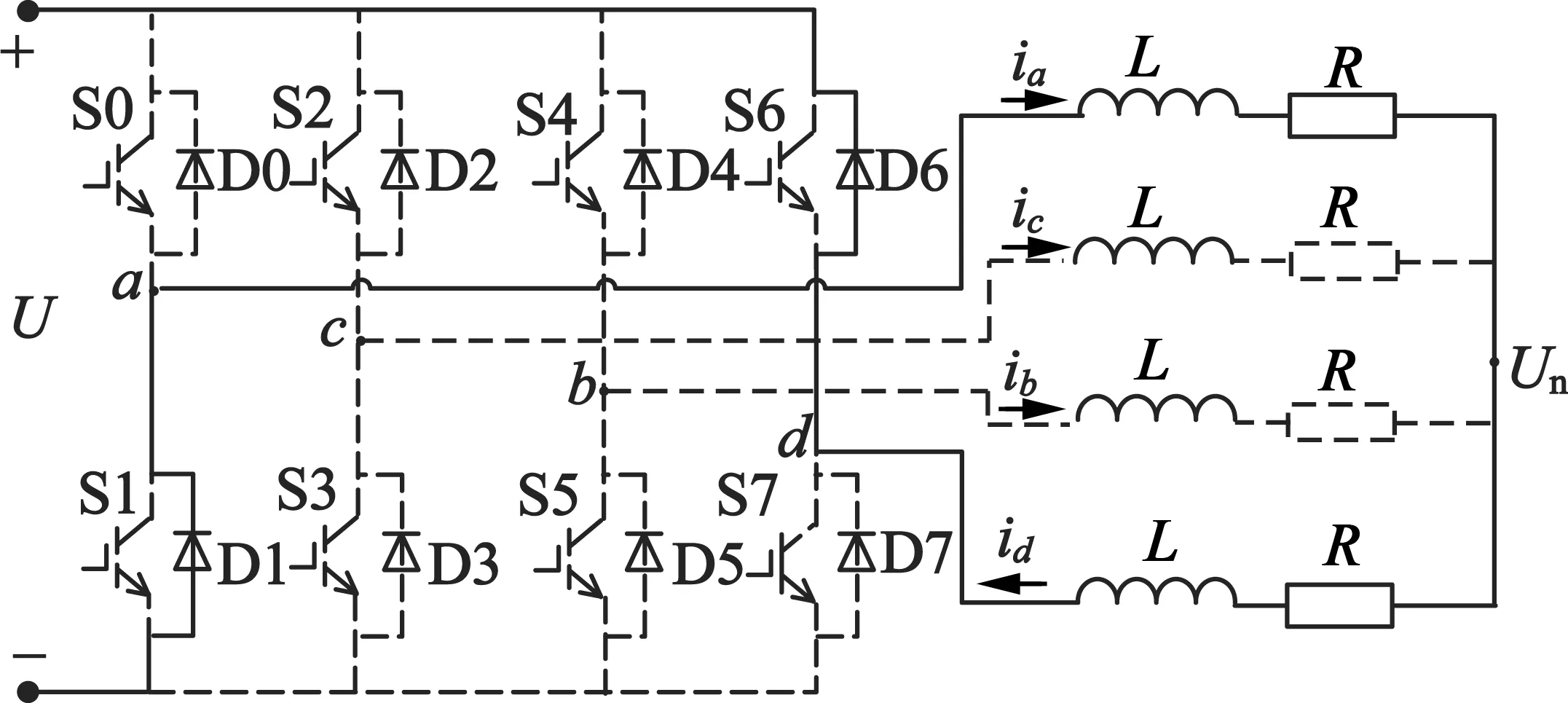
圖1是SRM的控制系統的硬件架構圖,它包括主電路和控制電路兩部分。
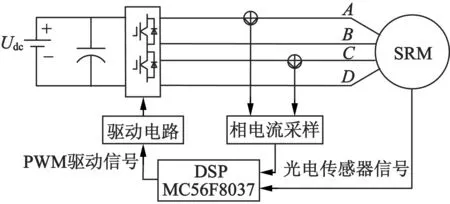
圖1 SRM控制系統的硬件架構圖
在忽略漏磁的情況下,磁通全部由氣隙進入轉子,由于鐵心磁導率可視為無窮大,鐵心表面可視為等磁位面,故氣隙磁通與定、轉子極弧表面垂直,在這種情況下,氣隙磁導僅由定轉子相互重疊部分的弧角度大小所決定,是轉子位置角θ的函數[8]。如圖2所示,可看出電感也是轉子位置角θ的函數,因為電感與磁導成正比。

圖2 SRM線性電感特性
當轉子極運轉到定子兩極中間時,此時有最小的氣隙磁導,最小的電感值Lmin;轉子極運轉到轉子極弧與定子極弧重合的過程中,繞組電感值隨著轉子位置角θ的增加而線性增大;當完全重合時,電感有最大值Lmax。在重合區間,電感保持最大值不變。當轉子極繼續運轉,位置角θ繼續增大,定子極弧與轉子極弧的重疊部分將逐漸地線性減小,對應的電感也將隨之減小。此過程,電感值L(θ)和位置角θ的變化關系如圖2所示,則理想電感可表示:
(1)
式中:k為一系數。
設SRM的相電壓為u,相電阻為R,相電流為i,則相電壓方程:

(2)
(3)
式中:ψ為磁鏈;e為相電動勢。
每相繞組的電磁功率:
(4)
根據量綱關系易知:
(5)
2 換流模式分析
實驗中以四相8/6極SRM為平臺,現就此平臺分析換流模式。采用兩相導通星形兩相四狀態控制模式,每一時刻都有兩相導通。以A,D相導通為例進行環流模式分析,A相橋臂處于調制狀態,D相下管處于常通狀態,C相上下管全部關斷。
圖3為電機電動狀態下采用滯環控制的瞬時電流波形。ih為滯環環寬,iref為電流給定值。t0時刻,ia達到滯環的下限值,S0導通,ia逐漸增大。當ia=iref時,滯環控制器HBC仍輸出高電平,S0持續導通,ia繼續增大,直到t1時刻,ia=iref+ih/2,滯環輸出發生翻轉,S0關斷;由于電機繞組的存在,電流通過D1續流,ia逐漸減小。直到t2時刻,ia=iref-ih/2,滯環輸出再次發生翻轉,再次使S0導通。這樣S0與D1交替導通,S3處于常通狀態,使輸出電流ia與給定值iref的差值保持在±ih/2范圍內。
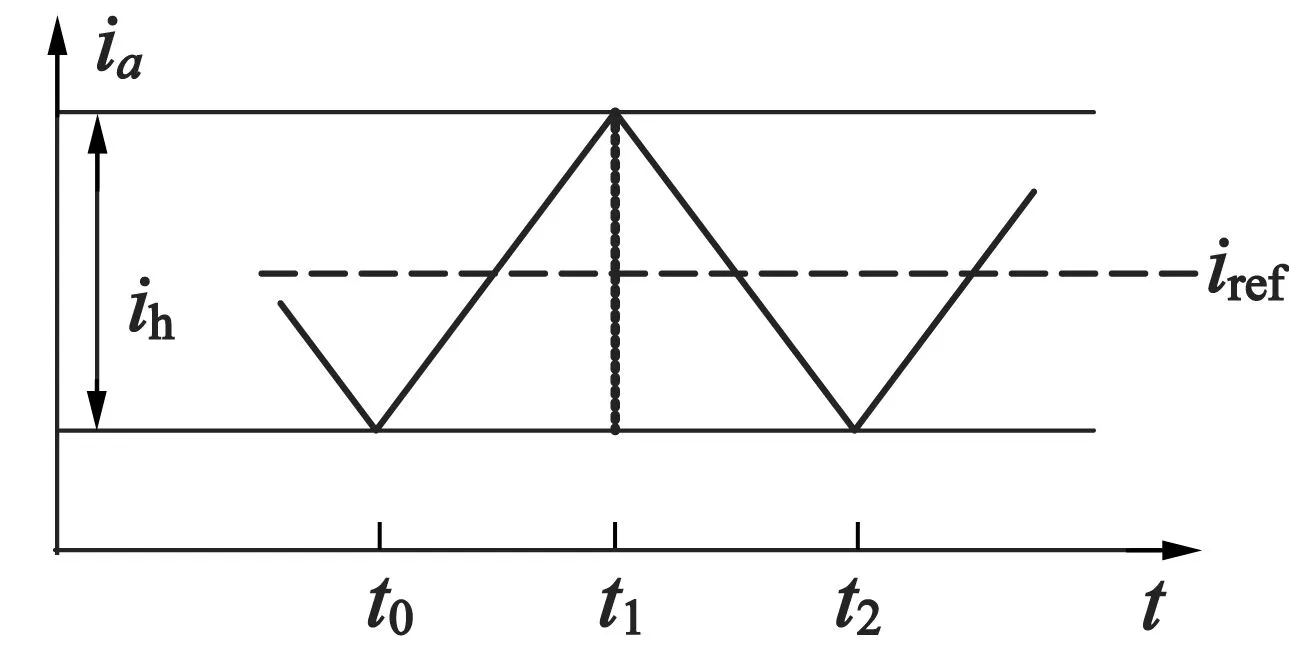
圖3 電動狀態下滯環控制的瞬時電流波形
圖4(a)為電動狀態下A上D下導通狀態的環流模式。電動勢平衡方程:
(6)
式中:U為直流側電壓,對應圖3中t2~t3時段,S0導通,電流增大。
圖4(b)為電動狀態下A下D下導通狀態的環流模式。電動勢平衡方程:
(7)
對應圖3中t3~t4時段,D1導通,電流減小。
圖4(c)為電動狀態下A下D下導通狀態的環流模式。電動勢平衡方程:
(8)
這種模式工作在換相的過程,目的是快速減小換相電流,抑制電磁轉矩波動,從而達到降低開關磁阻電動機噪聲。
(a) 電動狀態下S0,S7導通拓撲

(b) 電動狀態下D1,S7導通拓撲
(c) 電動狀態下D1,D6導通拓撲
圖4 電動狀態下的電流換相模式
3 控制策略
圖5是內環采用電流滯環控制雙閉環結構圖[9],KT為電機轉矩系數,J為轉動慣量。
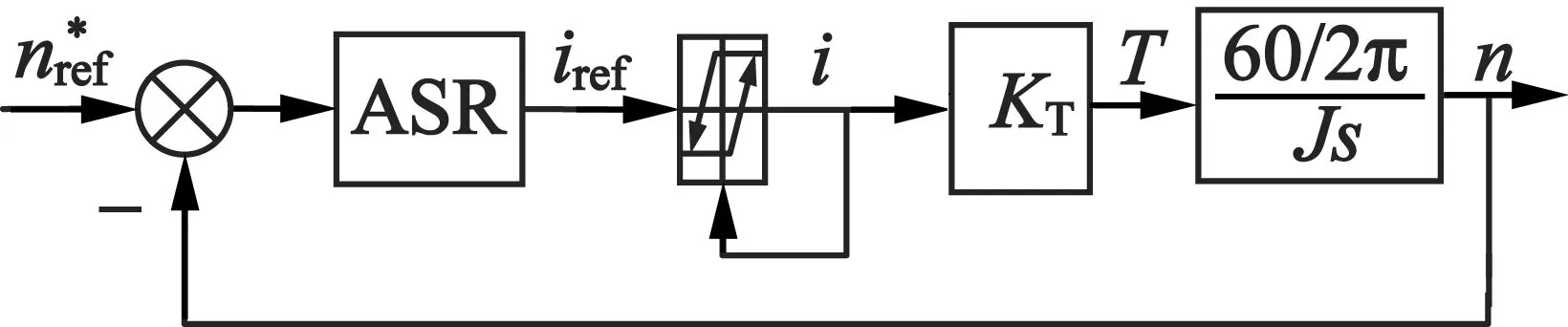
圖5 電流滯環控制的雙閉環結構圖
圖5的雙閉環系統中,轉速外環調節器ASR應具有良好的抗干擾能力,則按照典型Ⅱ系統設計,選擇PI調節器[10-12],外環控制規律:
(9)
式中:Knp,Kni分別為轉速外環比例、積分系數。
電流內環采用滯環控制。將實際轉速與給定轉速的差值送入轉速調節器ASR,得到電流的給定值iref,通過對電流進行比較,系統直接輸出高電平或低電平,使電流迅速跟蹤給定電流。電流內環采用滯環控制的雙閉環控制系統如圖5所示。電流滯環控制的A相原理圖如圖6所示。
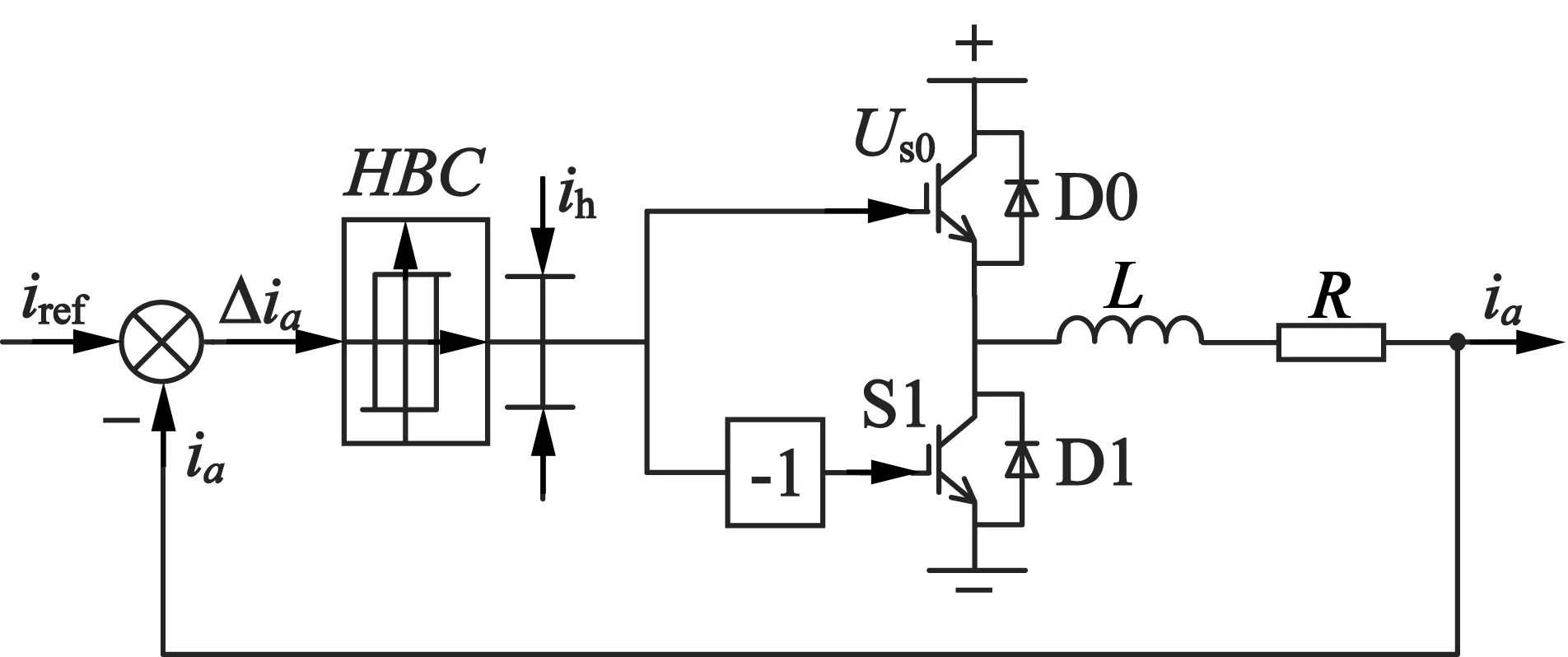
圖6 電流滯環控制的A相原理圖
4 實驗結果與分析
實驗中用到的控制芯片是Freescale的DSPMC56F8037;電機是四相8/6極SRM,電機參數如表1所示。
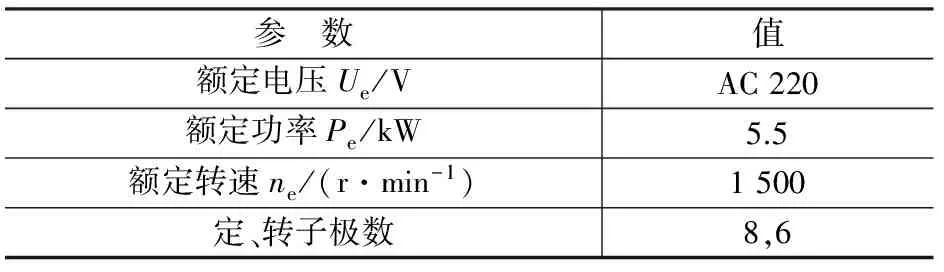
表1 電機參數
圖7是SRM空載起動的波形。從圖7中可以看出,電機空載時以最大電流起動,轉速迅速達到設定的給定值,隨后電流、轉速達到穩定。
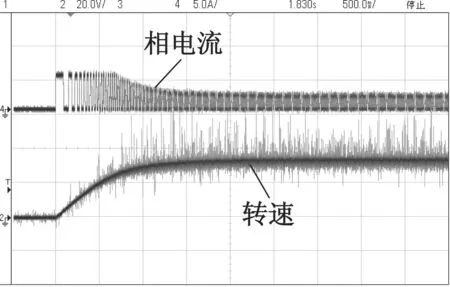
圖7 電流滯環控制下SRM空載起動波形(截圖)
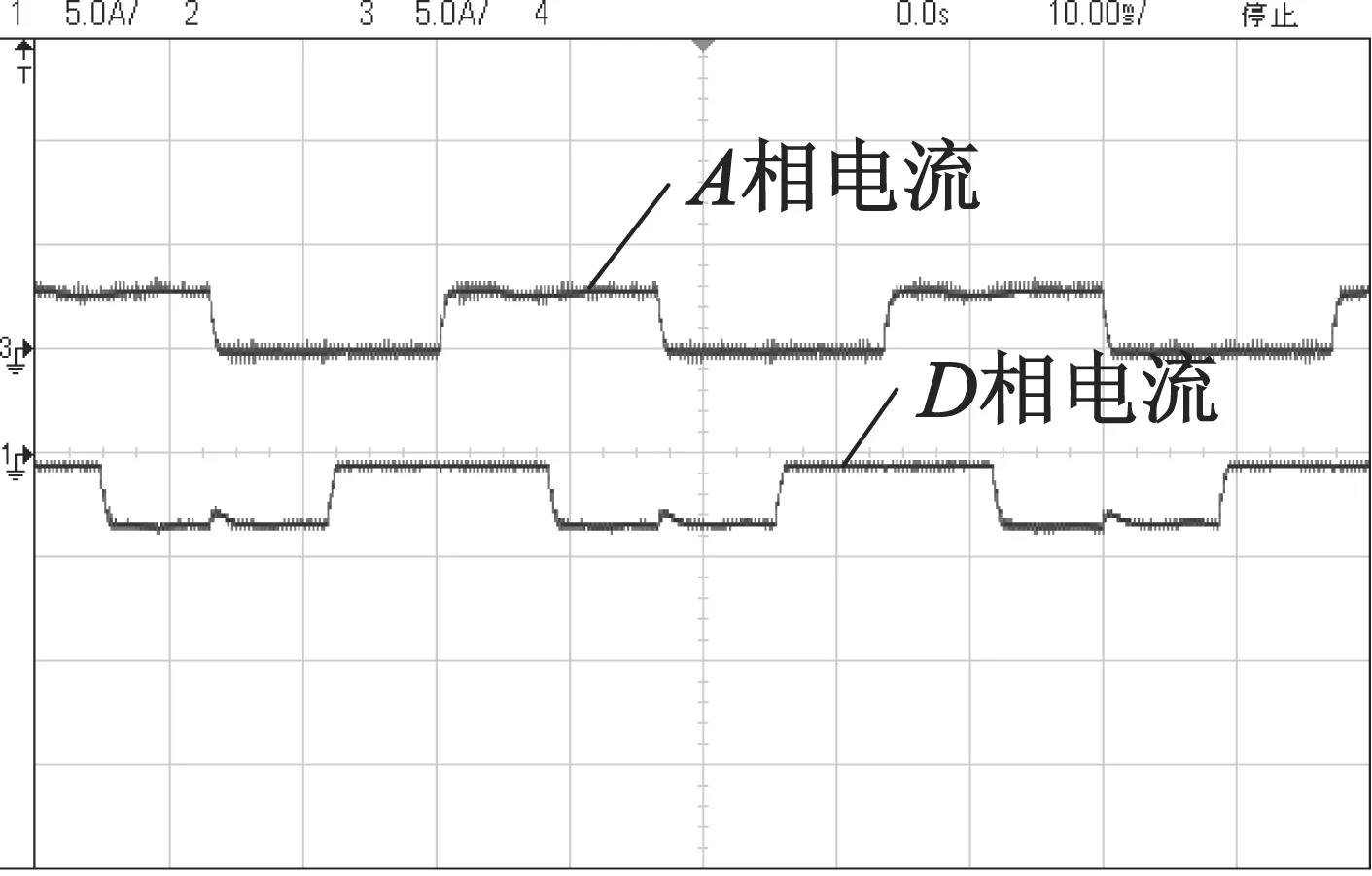
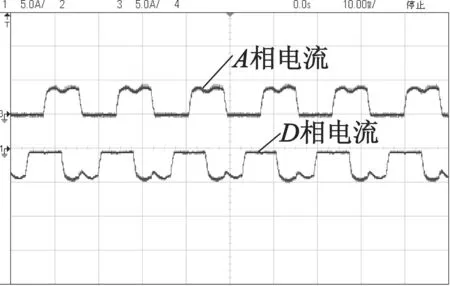
圖8是在40%的額定負載下,電流滯環控制模式下不同轉速對應電機相電流波形。從圖8可以看出,隨著給定轉速的增大,由于采用轉速外環、電流內環的控制方法,電機相電流幅值隨著增大。在電機從C,D相導通切換到A,D相導通的換相過程中,為了快速使換相電流降低,減少轉矩波動,采用了圖4(c)的拓撲,但這種方法對D相的電流造成波動。從圖中可以看出,隨著電機相電流的增大,這種波動越來越明顯。

(a) n=300 r/min
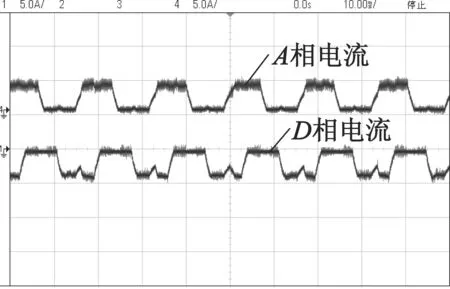
(b) n=600 r/min

(c) n=1 000 r/min
圖9是北京某公司生產的SRM控制器,在40%的額定負載下,角位置控制模式下不同轉速對應電機相電流波形。從圖9中可以看出,在換相的過程中,隨著轉速的增加,相電流的波動會越來越明顯,造成了轉矩的波動,產生較大的噪聲污染。
(a) n=300 r/min
(b) n=600 r/min
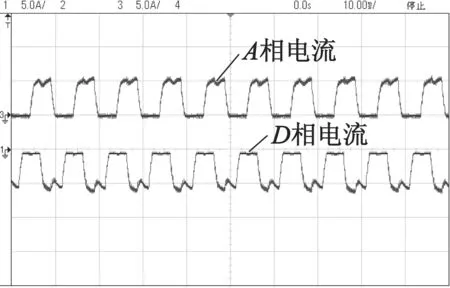
(c) n=1 000 r/min
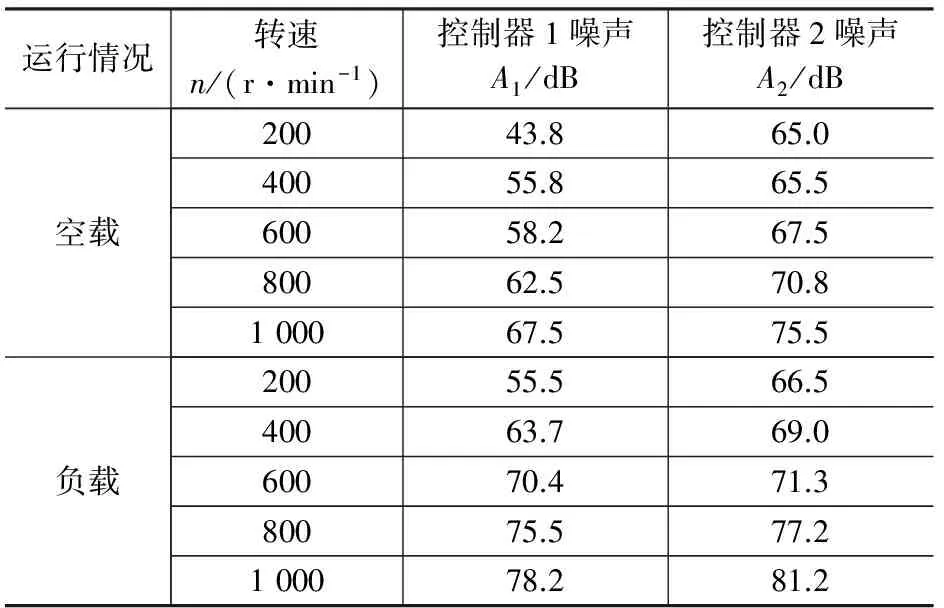
表1 噪聲對比實驗
表1中,控制器1是本實驗設計用到的,控制器2是北京某公司生產的,如圖10所示。實驗中負載為40%的額定負載,硬件實驗平臺如圖11所示。

圖10 北京某公司生產的SRM控制器

圖11 硬件實驗平臺
5 結 語
本文將滯環控制應用于SRM調速系統的內環控制上,結合轉速外環的PI調節控制,構成雙閉環調速系統。得出以下結論:
(1)在電機起動過程中,能保持較大電流快速起動;在電機空載和帶載情況下,能保持轉速穩態無靜差;在電機調速過程中,能夠更迅速地完成調速過程,達到穩態。
(2)整個實驗過程中,采用內環電流滯環后,使得電機相電流能夠快速地跟隨電流給定值,得到平穩的電流波形。
(3)SRM一直存在噪聲的問題,通過噪聲的對比試驗,這種控制策略在降低SRM的噪聲有了很好的效果。
[1] 李安來.開關磁阻電動機控制系統的設計[D].西安:西安科技大學,2012.
[2] 劉迪吉.開關磁阻調速電動機[M]北京:機械工業出版社,1994.
[3] 詹瓊華.開關磁阻電動機[M].武漢:華中理工大學出版社,1992.
[4] 吳建華.開關磁阻電動機設計與應用[M].北京:機械工業出版社,2000.
[5] 王宏華.開關型磁阻電動機調試控制技術[M].北京:機械工業出版社,1995.
[6] 候棟,李江,王世山.基于開關磁阻電動機的角度斬波控制研究[J].微特電機,2012,40(12):49-52.
[7] 聶兵.開關磁阻電動機的工作原理分析[J].工業控制計算機,2011,(5):5-6.
[8] 程明.微特電機及系統[M].北京:中國電力出版社,2008.
[9] 許曉峰.電機與拖動[M].北京:高等教育出版社,2009.
[10] 王孝武.現代控制理論基礎[M].北京:機械工業出版社,1998.
[11] 陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2003.
[12] 王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2008:104-139.
The Method of Switched Reluctance Motor Based on The Current Hysteresis Control
HUANG Hui1,CHENG Ning-ning2,HU Yang1,ZHAO De-yong1,WANG Lei1,WANG Yong-sheng1
(1.Hefei University of Technology,Hefei 230009,China;2.State Grid Electric Power Company of Anhui Xuancheng Power Supply Company,Xuangcheng 318020,China)
There are two most common methods, current chopping control and angular position control in the switched reluctance motor control system. The control method of switched reluctance motor with a current hysteresis control was introduced. Compared with a given current, the motor phase current wias controlled within a certain ring width by setting the hysteresis loop width. It can quickly track the given current to avoid that electrical current during startup is too large, and can quickly respond to changes in the rotational speed of the outer ring to achieve fast and stable control of the motor. After using the new inner hysteresis current control, it is a simple and effective solution for problems of the traditional control strategy such as slow chopping current dynamic response and complicated angular position control drawbacks.
switched reluctance motor; current hysteresis; control strategy
2015-02-04
TM352
A
1004-7018(2016)02-0071-04