基于MATLAB的ASR模糊仿真分析
2016-11-29 08:49:36宋年秀劉鵬
公路與汽運(yùn) 2016年5期
宋年秀,劉鵬
(青島理工大學(xué)汽車與交通學(xué)院,山東青島 266520)
基于MATLAB的ASR模糊仿真分析
宋年秀,劉鵬
(青島理工大學(xué)汽車與交通學(xué)院,山東青島 266520)
以單輪車輛模型為研究對(duì)象,采用模糊控制策略,在MATLAB/Simulink中建立驅(qū)動(dòng)(輪)防滑系統(tǒng)(ASR)仿真模型,模擬單軸驅(qū)動(dòng)的汽車在附著系數(shù)較低路面上起步加速時(shí)ASR的工作過程。仿真結(jié)果表明,ASR系統(tǒng)模型能在0.5s內(nèi)控制車輪滑移率為13%~15%,建立的ASR模型可靠,模糊策略控制的ASR系統(tǒng)能達(dá)到理想的驅(qū)動(dòng)防滑效果。
汽車;驅(qū)動(dòng)(輪)防滑系統(tǒng)(ASR);模糊控制;起步行駛;仿真分析
汽車在附著系數(shù)較低路面上行駛時(shí)無法獲得足夠大的地面附著力,導(dǎo)致輪胎打滑甚至空轉(zhuǎn),使發(fā)動(dòng)機(jī)輸出的扭矩得不到充分利用,不但加劇輪胎磨損,還會(huì)使燃油經(jīng)濟(jì)性降低,影響汽車起步、加速的操縱穩(wěn)定性。在汽車加速行駛時(shí)要求驅(qū)動(dòng)(輪)防滑系統(tǒng)(ASR)能迅速準(zhǔn)確地對(duì)車輪滑轉(zhuǎn)率進(jìn)行調(diào)控,因而合理、有效的控制方法尤為重要。通常采用控制發(fā)動(dòng)機(jī)輸出功率、制動(dòng)干預(yù)控制和控制差速鎖鎖止程度3種方式進(jìn)行調(diào)節(jié)防止驅(qū)動(dòng)輪滑轉(zhuǎn)。制動(dòng)干預(yù)控制是其中最有效和最直接的控制方式,通過對(duì)地面附著系數(shù)低的驅(qū)動(dòng)輪施加制動(dòng)力進(jìn)行干預(yù),防止驅(qū)動(dòng)輪打滑。為了準(zhǔn)確預(yù)測車輛的動(dòng)力學(xué)性能,縮短ASR調(diào)試和試驗(yàn)的過程和時(shí)間,該文建立ASR仿真模型,模擬驅(qū)動(dòng)輪在較低附著系數(shù)路面上行駛時(shí)ASR的控制過程。
1 系統(tǒng)建模
1.1單輪車輛模型
模擬汽車在附著系數(shù)較低的路面上起步時(shí)的行駛狀態(tài),在兩側(cè)驅(qū)動(dòng)輪路面附著系數(shù)差別不大的前提下假設(shè)附著系數(shù)相同。為了更準(zhǔn)確地對(duì)不同附著系數(shù)下驅(qū)動(dòng)輪的驅(qū)動(dòng)過程進(jìn)行研究,以單側(cè)輪胎為研究對(duì)象建立單輪車輛模型(見圖1)。
忽略行駛中的空氣阻力和車輪滾動(dòng)阻力,得到車輛運(yùn)動(dòng)方程:

式中:M為汽車質(zhì)量的1/4(kg)。
忽略滾動(dòng)阻力時(shí)的車輪運(yùn)動(dòng)方程為:

式中:Ⅰ為車輪的轉(zhuǎn)動(dòng)慣量(kg·m2)為車輪的轉(zhuǎn)動(dòng)角加速度(rad/s2)。
車輛縱向附著力為:

式中:μ為縱向附著系數(shù);N為車輪垂向壓力(N)。
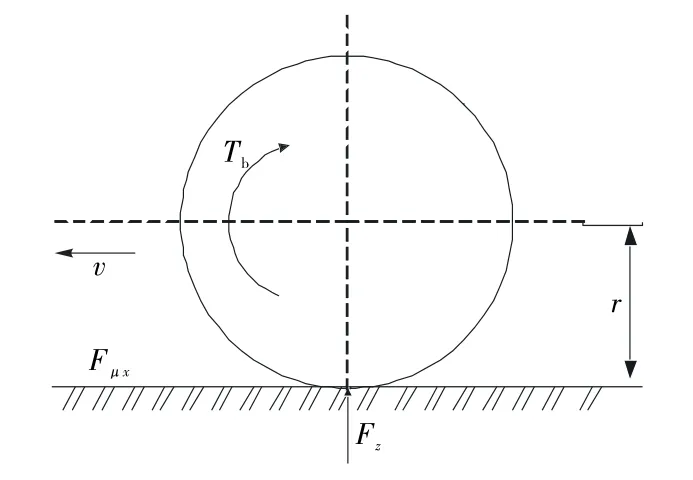
圖1 單輪車輛模型示意圖
1.2發(fā)動(dòng)機(jī)模型
由于在起步加速過程中很難精確表示發(fā)動(dòng)機(jī)的瞬時(shí)輸出扭矩,這里將發(fā)動(dòng)機(jī)功率和節(jié)氣門隨時(shí)間的開度建立數(shù)學(xué)模型,近似表達(dá)汽車起步加速過程中發(fā)動(dòng)機(jī)輸出扭矩的變化。根據(jù)駕駛員經(jīng)驗(yàn),將發(fā)動(dòng)機(jī)節(jié)氣門開度X表示為一個(gè)隨時(shí)間t變化的指數(shù)函數(shù):

取單輪車輛發(fā)動(dòng)機(jī)模型標(biāo)定功率為100 k W,將外特性功率擬合為一條指數(shù)曲線:

式中:P為驅(qū)動(dòng)功率;u為驅(qū)動(dòng)輪的轉(zhuǎn)速。
將節(jié)氣門開度與部分功率之間的關(guān)系擬合為:

發(fā)動(dòng)機(jī)在5s內(nèi)達(dá)到標(biāo)定功率的80%左右符合實(shí)際情況,驅(qū)動(dòng)扭矩與驅(qū)動(dòng)輪轉(zhuǎn)速之間的關(guān)系為:
式中:T為發(fā)動(dòng)機(jī)瞬時(shí)輸出扭矩。
1.3輪胎模型
輪胎是制動(dòng)器制動(dòng)力、地面驅(qū)動(dòng)力和發(fā)動(dòng)機(jī)輸出轉(zhuǎn)矩的承載體,輪胎模型是指驅(qū)動(dòng)過程中附著率與其他參數(shù)的關(guān)系。除滑轉(zhuǎn)率影響車輛附著系數(shù)外,車速、路面狀況、天氣及輪胎花紋等都會(huì)影響汽車行駛時(shí)的附著系數(shù)。現(xiàn)實(shí)中無法定量表示不同因素對(duì)車輛附著系數(shù)的影響程度,但滑轉(zhuǎn)率與附著系數(shù)存在一定的關(guān)系,可以通過建立附著系數(shù)的表達(dá)式建立輪胎模型。這里采用應(yīng)用較廣泛的雙線性模型建立輪胎模型(見圖2)。
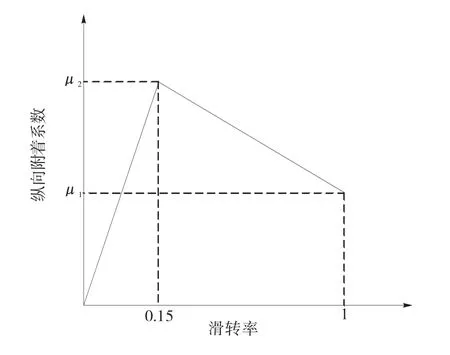
圖2 縱向附著系數(shù)-滑轉(zhuǎn)率雙線性曲線
雙線性輪胎模型的數(shù)學(xué)表達(dá)式為:
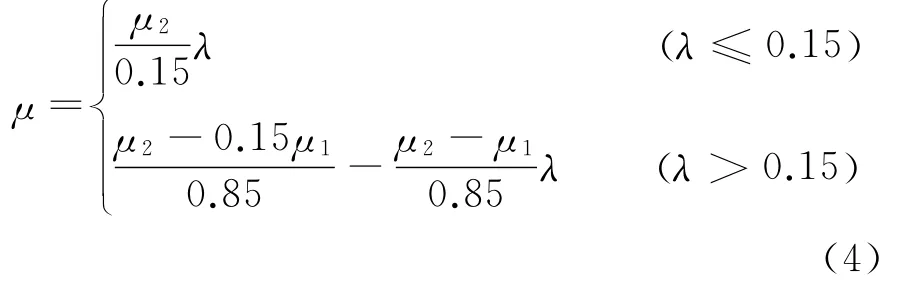
式中:μ為車輪縱向附著系數(shù);λ為縱向滑移率。
式(4)反映了汽車行駛時(shí)輪胎縱向附著系數(shù)和滑移率的關(guān)系。輪胎參數(shù)參照型號(hào)195/55R15,其滾動(dòng)半徑r=298mm,建立雙線性輪胎Simulink模型(見圖3)。
1.4制動(dòng)器模型
制動(dòng)系統(tǒng)包括傳動(dòng)機(jī)構(gòu)和制動(dòng)器兩部分,傳動(dòng)機(jī)構(gòu)主要指液壓傳動(dòng)系統(tǒng)。為簡化系統(tǒng),忽略壓力傳送的延遲,在仿真模型中,制動(dòng)器模型實(shí)際為施加在輪胎上的由模糊控制器調(diào)節(jié)的制動(dòng)力矩。對(duì)于盤
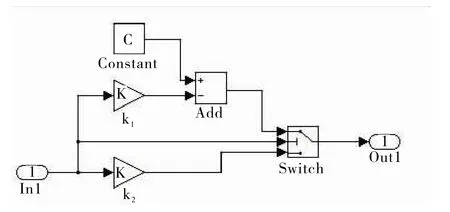
圖3 雙線性輪胎模型
式制動(dòng)器制,制動(dòng)力矩與制動(dòng)油泵壓力間的關(guān)系為:
式中:Mφ為制動(dòng)器制動(dòng)力矩(N·m);kp為制動(dòng)器制動(dòng)系數(shù);p為制動(dòng)器氣液壓力(k Pa)。
1.5滑轉(zhuǎn)率計(jì)算公式
汽車加速或在對(duì)開路面行駛時(shí),路面與輪胎間會(huì)發(fā)生滑轉(zhuǎn),滑轉(zhuǎn)程度用滑轉(zhuǎn)率表示,計(jì)算公式為:
式中:λ為車輪滑轉(zhuǎn)率;ω為車輪轉(zhuǎn)動(dòng)角速度。
1.6模糊控制器模型
采用基于對(duì)車輪滑轉(zhuǎn)率控制的模糊控制系統(tǒng),其所涉及的量有3個(gè),分別為實(shí)際滑轉(zhuǎn)率與目標(biāo)滑轉(zhuǎn)率的偏差即滑動(dòng)率偏差Es、偏差變化率Er及制動(dòng)力矩增量U。仿真模型見圖4。
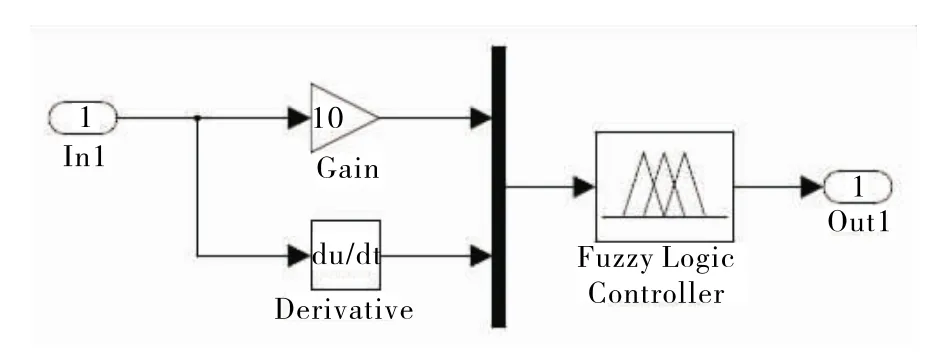
圖4 模糊控制器模型
圖4所示模糊控制器有2個(gè)輸入端和1個(gè)輸出端,輸入端為Es和Er,輸出端為U,模糊控制基于輸入端的2個(gè)變量進(jìn)行邏輯判斷,然后輸出控制變量U,調(diào)節(jié)制動(dòng)器制動(dòng)力矩的變化。基于模糊控制的ASR控制系統(tǒng)能適應(yīng)ASR控制的特點(diǎn),使ASR系統(tǒng)更接近理想的控制效果。
2 汽車ASR系統(tǒng)仿真及結(jié)果分析
2.1ASR仿真模型
ASR系統(tǒng)由發(fā)動(dòng)機(jī)模塊、制動(dòng)器模塊、輪胎模塊、模糊控制模塊和ASR動(dòng)力學(xué)模塊組成,發(fā)動(dòng)機(jī)動(dòng)力輸出后傳遞到輪胎驅(qū)動(dòng)汽車行駛,ASR模糊控制系統(tǒng)接收到輪胎的滑轉(zhuǎn)率信息后進(jìn)行邏輯判斷,并調(diào)節(jié)制動(dòng)系統(tǒng)的制動(dòng)力大小,減小輪胎的轉(zhuǎn)速,使滑轉(zhuǎn)率降低。
根據(jù)車輛運(yùn)動(dòng)時(shí)的方程即式(1)~(3)建立Simulink ASR仿真模型(見圖5)。
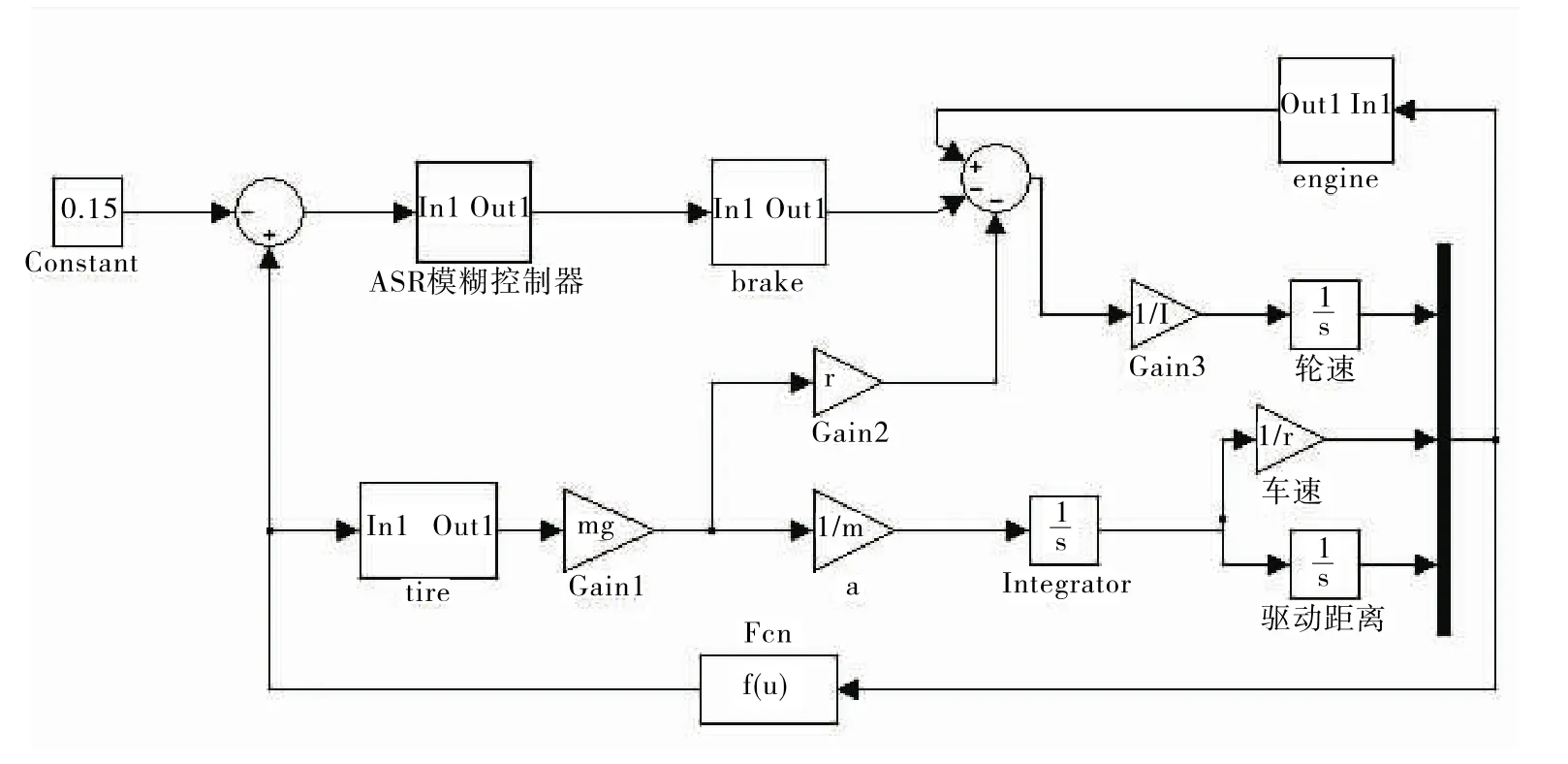
圖5 ASR系統(tǒng)模型
仿真過程中,給定理想的滑轉(zhuǎn)率為15%,滑轉(zhuǎn)率計(jì)算模塊輸入為車速、驅(qū)動(dòng)距離和車輪轉(zhuǎn)動(dòng)速度,經(jīng)過計(jì)算分析輸出當(dāng)前車輪的滑轉(zhuǎn)率。雙線性輪胎模塊可根據(jù)得到的實(shí)際滑轉(zhuǎn)率計(jì)算當(dāng)前車輪附著系數(shù)并將結(jié)果傳遞到ASR的動(dòng)力模塊。模糊控制器對(duì)理想滑轉(zhuǎn)率和實(shí)際滑轉(zhuǎn)率的誤差進(jìn)行計(jì)算分析,控制制動(dòng)系統(tǒng)產(chǎn)生制動(dòng)力矩減緩車輪的轉(zhuǎn)動(dòng)速度,通過在極短時(shí)間內(nèi)的調(diào)節(jié)使車輪轉(zhuǎn)動(dòng)速度和實(shí)際車速保持穩(wěn)定關(guān)系。
2.2驅(qū)動(dòng)工況仿真分析
為了分析以滑轉(zhuǎn)率為控制對(duì)象的ASR控制算法的有效性,對(duì)單輪車輛模型進(jìn)行在附著系數(shù)較小的路面起步加速行駛的工況仿真。仿真參數(shù)如下:整備質(zhì)量1 600kg;單輪載荷3 920N;車輪轉(zhuǎn)動(dòng)慣量Ⅰ=6.2kg/m2;仿真時(shí)間為1s。在計(jì)算機(jī)上模擬單軸驅(qū)動(dòng)車輛起步加速狀況,得到車輪速度和車速的對(duì)比曲線、車輪滑轉(zhuǎn)率曲線(見圖6、圖7)。
由圖6、圖7可得:ASR在0.5s內(nèi)使車輪滑移率控制在15%左右,車輪滑移率為10%~20%時(shí)才能保證汽車行駛時(shí)的縱向和橫向穩(wěn)定性。起步加速過程中,離合器接合瞬間車身由于慣性保持靜止,車輪受到發(fā)動(dòng)機(jī)的輸出扭矩開始轉(zhuǎn)動(dòng),車速為零,因此滑轉(zhuǎn)率接近100%。隨后ASR通過不斷向發(fā)動(dòng)機(jī)和制動(dòng)系統(tǒng)發(fā)出信號(hào)對(duì)車輪滑轉(zhuǎn)率進(jìn)行反復(fù)調(diào)控,控制車輪受力平衡。在0.5s之后,車速與輪速達(dá)到相對(duì)穩(wěn)定狀態(tài),通過計(jì)算可知此時(shí)車輪滑轉(zhuǎn)率仍保持在13%~15%。
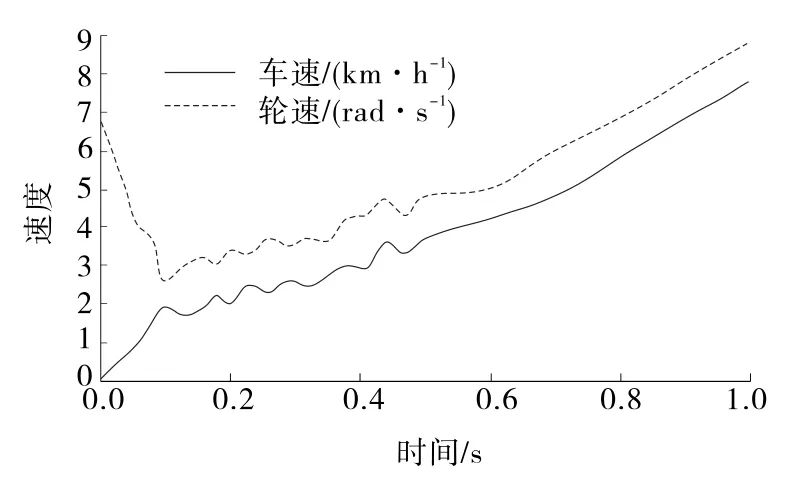
圖6 輪速與車速對(duì)比
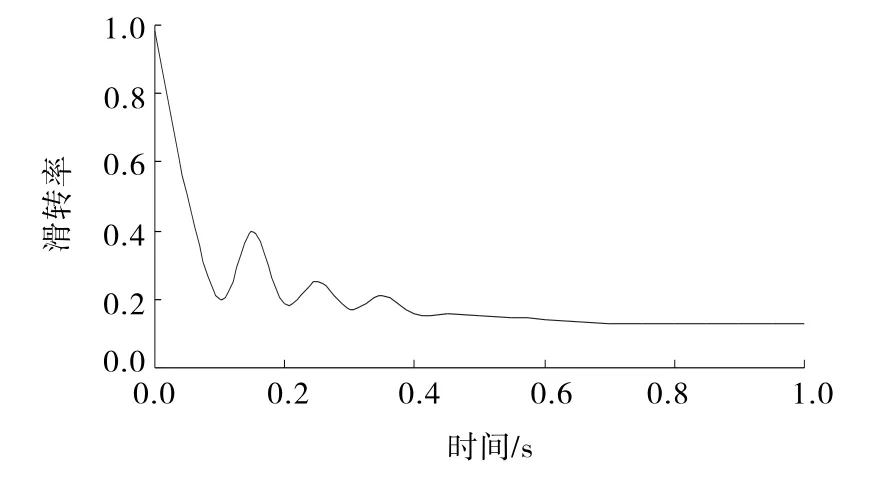
圖7 滑轉(zhuǎn)率變化曲線
3 結(jié)論
(1)采用模糊控制策略建立基于車輪滑轉(zhuǎn)率控制的ASR模型,能完成單軸驅(qū)動(dòng)汽車起步行駛時(shí)的仿真分析。
(2)ASR系統(tǒng)在較短的時(shí)間內(nèi)通過對(duì)發(fā)動(dòng)機(jī)輸出扭矩和制動(dòng)器制動(dòng)力矩進(jìn)行調(diào)控,使車輪滑轉(zhuǎn)率保持在理想范圍之內(nèi)。ASR系統(tǒng)可有效防止車輪打滑,保證汽車行駛的縱向和橫向穩(wěn)定性。
[1] 孫仁云.汽車電器與電子技術(shù)[M].北京:機(jī)械工業(yè)出版社,2011.
[2] 余志生.汽車?yán)碚摚跰].北京:機(jī)械工業(yè)出版社,2009.
[3] 李發(fā)均.基于MATLAB的ASR模糊控制仿真研究[J].艦船電子工程,2011(11).
[4] 程軍.防抱死制動(dòng)系統(tǒng)的不同控制算法的模擬研究[J].汽車技術(shù),1998(8).
[5] 王偉達(dá).汽車ASR系統(tǒng)控制算法及其硬件在環(huán)仿真研究[J].汽車工程,2009,31(9).
[6] 邊明遠(yuǎn).汽車ASR技術(shù)研究的進(jìn)展[J].北京汽車,2002(4).
[7] 孫尚志,熊小根,孫駿.汽車驅(qū)動(dòng)防滑控制系統(tǒng)的控制規(guī)律研究[J].客車技術(shù)與研究,2011(4).
[8] 吳玲,聞凱,董敏,等.自適應(yīng)模糊PID控制在汽車ABS系統(tǒng)中的應(yīng)用[J].自動(dòng)化技術(shù)與應(yīng)用,2016(1).
[9] 沈杰.驅(qū)動(dòng)防滑技術(shù)ASR在商用車上的應(yīng)用[J].客車技術(shù)與研究,2009(3).
[10] 馬繼昌,司景萍,高振剛.基于MATLAB/Simulink的半主動(dòng)懸架仿真分析[J].公路與汽運(yùn),2015(2).
[11] 吳玲,孫宇,孫永榮.基于Matlab/Simulink的汽車ABS系統(tǒng)的建模與仿真[J].自動(dòng)化應(yīng)用,2014(5).
[12] 羅俊奇.汽車驅(qū)動(dòng)防滑控制系統(tǒng)的研究[D].廣州:廣東工業(yè)大學(xué),2008.
U463.5
A
1671-2668(2016)05-0007-03
2016-02-10
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
決策探索(2014年21期)2014-11-25 12:29:50
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17