基于前饋補償?shù)闹鄙龣C控制律設(shè)計與仿真
2016-11-28 21:34:37劉宇亮張琳朱亞芬
航空兵器 2016年4期
關(guān)鍵詞:系統(tǒng)仿真
劉宇亮+張琳+朱亞芬
摘要: 以某型運輸直升機為研究對象, 根據(jù)飛行品質(zhì)規(guī)范ADS-33E的要求, 在增穩(wěn)控制的基礎(chǔ)上, 設(shè)計前饋補償控制律, 以改善系統(tǒng)的操縱性。 通過擬合不同設(shè)計節(jié)點的前饋控制參數(shù), 實現(xiàn)包線內(nèi)的調(diào)參控制律。 對所設(shè)計的系統(tǒng)進行仿真試驗驗證, 結(jié)果表明采用上述控制方案可取得良好的控制效果, 證明了該方法的可行性和有效性。
關(guān)鍵詞: 直升機; 飛行品質(zhì)規(guī)范; 前饋補償; 控制律; 系統(tǒng)仿真
中圖分類號: V249.122+.4 文獻標識碼: A 文章編號: 1673-5048(2016)04-0030-06
Abstract: Taking a transport helicopter as the research subject, based on stability augmentation control, feedforward compensation control law is designed to improve the control system according to the flying qualities specification of ADS-33E. By fitting the feedforward control parameters of different flight nodes, parameter adjusting control law in the full scale flight envelop can be realized. The designed system is simulated and tested, and the results indicate that satisfied control effect is obtained by adopting the proposed control method, which proves the feasibility and effectiveness of the method.
Key words: helicopter; flying qualities specification; feedforward compensation; control law; system simulation
0引言
由于直升機的穩(wěn)定性較差, 只靠飛行員操縱來完成復雜、 精確的飛行是非常困難的, 故需要通過加入飛行控制系統(tǒng)來改善其飛行品質(zhì)[1]。 基于三軸穩(wěn)定控制的增穩(wěn)控制系統(tǒng)雖然能夠有效提高飛機的穩(wěn)定性, 但是會導致系統(tǒng)響應(yīng)的速度變慢、 幅值變小, 從而造成快捷性、 操縱功效等性能指標等級不高。 針對上述問題, 可以通過在增穩(wěn)控制回路前面增加一個前饋電氣通道的方式來解決問題, 這就是控制增穩(wěn)系統(tǒng), 該系統(tǒng)能夠在兼顧直升機穩(wěn)定性的同時提高操縱功效等性能。 此外, 直升機各通道之間耦合影響嚴重, 通過前饋補償方式實現(xiàn)交聯(lián)解耦控制, 可以有效提高直升機的操縱品質(zhì)。 所以, 直升機控制增穩(wěn)系統(tǒng)的設(shè)計與實現(xiàn)具有重要的理論意義和實際意義。
1飛行品質(zhì)規(guī)范ADS-33E的要求
針對直升機操縱性能的優(yōu)劣, 美國軍用直升機飛行品質(zhì)規(guī)范ADS-33E[2-3]有明確規(guī)定。
1.1對姿態(tài)響應(yīng)的要求
飛行品質(zhì)規(guī)范ADS-33E分別針對飛機的小幅/高頻、 小幅/中頻、 中幅/中低頻和大幅姿態(tài)變化的響應(yīng)規(guī)定了相應(yīng)的指標要求, 即帶寬及相位滯后、 阻尼比、 快捷性和操縱功效。 對于俯仰姿態(tài)變化, 5°以下為小幅, 30°以上為大幅; 滾轉(zhuǎn)姿態(tài)的劃分界限為10°和60°; 對航向角沒有明確數(shù)據(jù)。 飛行速度V≤23 m/s時為低速和懸停狀態(tài); V>23 m/s時為前飛狀態(tài)。
帶寬及相位滯后指標規(guī)定了頻域要求, 保證快速操縱時直升機具有良好的跟隨性和靈敏度。 設(shè)從駕駛員輸入量到相應(yīng)姿態(tài)角輸出量的傳遞函數(shù)為G(s), 相關(guān)定義在其波特圖中, 如圖1所示。
圖1中出現(xiàn)了相位帶寬和增益帶寬, 其中相位滯后135°的頻率定義為相位帶寬, 在幅頻曲線上留出6 dB的余量所對應(yīng)的頻率為增益帶寬。 由于研究對象的響應(yīng)類型為姿態(tài)指令姿態(tài)保持響應(yīng)類型(ACAH), 帶寬ωBW=ωBWphase。 延遲時間τp用以表示系統(tǒng)的相位滯后, τp越小說明相位曲線隨頻率下降越慢, 直升機的駕駛品質(zhì)越好。
飛行品質(zhì)指標的要求如圖2所示。 為了表征帶寬和延遲時間與飛行品質(zhì)的關(guān)系, ADS-33E在帶寬-延遲時間二維平面內(nèi)定義了不同的區(qū)域, 以區(qū)別飛行品質(zhì)的高低; 而且按照不同的任務(wù)科目基元、 環(huán)境感知度和控制通道規(guī)定了不同的標準。 由于本文的研究對象是運輸型直升機, 所以選擇除空戰(zhàn)外的MTE且UCE=1, 以滾轉(zhuǎn)通道為例, 帶寬與延遲時間的品質(zhì)指標要求如圖2(a)所示。
對于直升機的動穩(wěn)定性, 飛行品質(zhì)規(guī)范對系統(tǒng)的阻尼比、 自然頻率也做出了具體的規(guī)定。 以滾轉(zhuǎn)通道為例, 阻尼比和自然頻率的限制如圖2(b)所示。
針對飛機改變姿態(tài)的快慢, 對操作響應(yīng)的快捷性做出要求, 即角速度峰值對姿態(tài)改變量之比要足夠大。 以滾轉(zhuǎn)通道為例, 快捷性指標的要求如圖2(c)所示; 其中 Δpk和Δmin分別為滾轉(zhuǎn)角階躍響應(yīng)的峰值和最小值, ppk為滾轉(zhuǎn)角速度的最大值。
大機動飛行時, 直升機的響應(yīng)要具備足夠大的姿態(tài)變化(對于姿態(tài)指令/姿態(tài)保持響應(yīng)型)或足夠大的角速度(對于速率響應(yīng)型), 品質(zhì)規(guī)范規(guī)定了其最低限。 以滾轉(zhuǎn)通道為例, 針對姿態(tài)指令響應(yīng)類型且有限機動的飛機, 1級品質(zhì)等級的要求為在飛機懸停與低速飛行時, 滾轉(zhuǎn)角至少達到±15°; 在前飛時, 滾轉(zhuǎn)角至少達到±25°。
1.2對總距操縱響應(yīng)的要求
航空兵器2016年第4期劉宇亮等: 基于前饋補償?shù)闹鄙龣C控制律設(shè)計與仿真飛行品質(zhì)規(guī)范對總距操縱響應(yīng)的時域要求為駕駛員對總距桿施加階躍操縱后, 法向速度應(yīng)在5 s之內(nèi)具有大致為一階的形狀。 這是為了保證總距突變后初期的法向速度應(yīng)直線變化, 便于駕駛員精確控制升降和高度。 此外, 品質(zhì)規(guī)范規(guī)定了總距操縱的操縱功效, 即操縱總距桿快速偏離配平位置后的1.5 s內(nèi), 產(chǎn)生的法向速度至少達到0.81 m/s (等級1)、 0.28 m/s(等級2)、 0.20 m/s(等級3)。
1.3對軸間耦合的要求
式中: A∈R9×9為狀態(tài)矩陣, B∈R9×4為控制矩陣, A, B中的參數(shù)隨飛行高度和速度的變化而變化; C∈R9×9為輸出矩陣(取為單位陣); X=[u v w θ ψ q p r]為狀態(tài)向量, 其中, u, v, w分別為前向、 橫向和法向速度; θ, , ψ分別為俯仰角、 滾轉(zhuǎn)角和航向角; q, p, r分別為直升機繞機體OX, OY, OZ軸的角速度; U=[δeδaδrδc]為輸入向量, 各分量依次為縱向周期變距、 橫向周期變距、 尾槳槳距和總距。
直升機模型中的參數(shù)隨飛行高度和速度而變化, 故選取不同高度和速度下的14個飛行狀態(tài)點作為研究對象, 如表1所示。
2.2增穩(wěn)控制系統(tǒng)
為提高直升機的靜穩(wěn)定性, 便于駕駛員操縱, 通常采用加入增穩(wěn)控制系統(tǒng)的方法。 本飛機的增穩(wěn)控制包括三軸穩(wěn)定和高度穩(wěn)定兩部分。[4]
三軸穩(wěn)定控制系統(tǒng)設(shè)計的目的是實現(xiàn)直升機姿態(tài)角穩(wěn)定。 在俯仰、 傾斜、 航向三通道分別引入各通道姿態(tài)角和姿態(tài)角速度信號, 實現(xiàn)比例加測速反饋控制[5], 并設(shè)計滿足要求的控制參數(shù)。 高度通道則引入高度傳感器和法向加速度計信號, 設(shè)計PID控制器, 保證飛機高度穩(wěn)定并能跟蹤給定的高度指令[6]。 在增穩(wěn)系統(tǒng)基礎(chǔ)上設(shè)計前饋控制器, 提高飛機的操縱性能。
3增穩(wěn)控制系統(tǒng)性能的檢驗
依據(jù)飛行品質(zhì)的要求, 通過仿真試驗評價加入增穩(wěn)系統(tǒng)后飛機的操縱性能, 為前饋控制器的設(shè)計提供依據(jù)。
3.1對姿態(tài)響應(yīng)的檢驗
取飛行狀態(tài)點4(速度V=41 m/s、 高度H=100 m), 以滾轉(zhuǎn)通道為例進行檢驗。
使用MATLAB中的linmod()函數(shù), 求出仿真模型中駕駛桿橫向位移量到滾轉(zhuǎn)角的傳遞函數(shù); 并根據(jù)飛行品質(zhì)規(guī)范中的規(guī)定, 計算得出帶寬ωBW=5和延遲時間τp=0.05。 可以看出, 飛機滾轉(zhuǎn)通道的帶寬與延遲時間達到1級品質(zhì)指標的要求, 表明前期所設(shè)計的三軸穩(wěn)定控制律達到了較理想的帶寬和延遲時間指標要求。
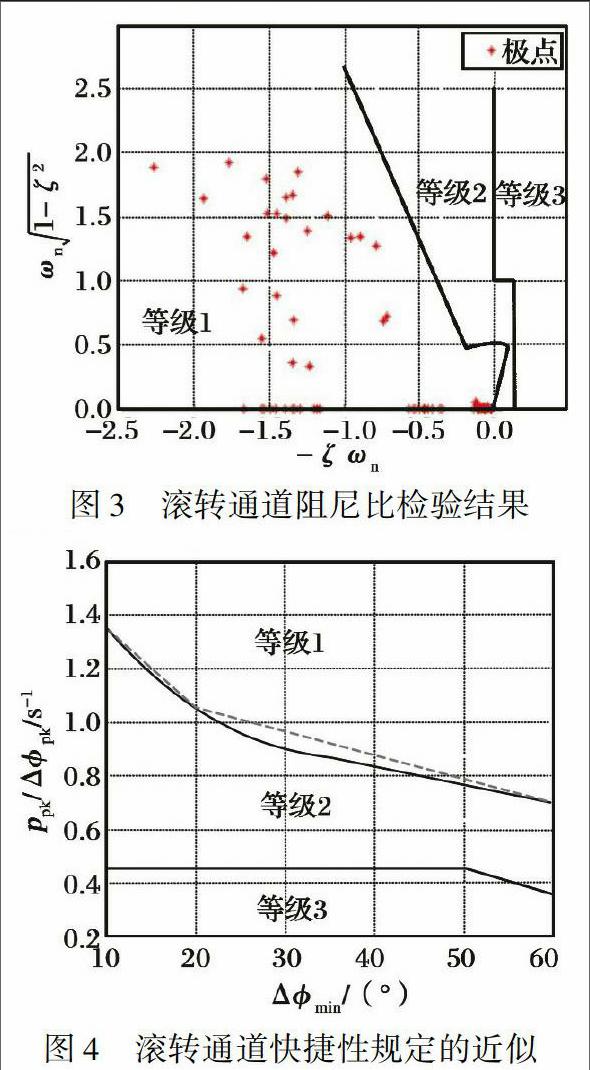
求出駕駛桿位移量到滾轉(zhuǎn)角傳遞函數(shù)的極點, 根據(jù)極點在復平面上的位置, 確定阻尼比的品質(zhì)等級, 見圖3所示。
由圖3可以看出, 滾轉(zhuǎn)通道傳遞函數(shù)的極點全部落在1級品質(zhì)要求的區(qū)域內(nèi), 表明加入三軸穩(wěn)定控制律的飛機具有滿意的阻尼特性。
給直升機的滾轉(zhuǎn)通道加入幅值為20的階躍信號, 根據(jù)仿真試驗得出ppk/Δpk=1.07, 由于階躍響應(yīng)沒有超調(diào)量, 故Δpk=Δmin=12.12, 快捷性和操縱功效都位于2級指標范圍內(nèi)。 可見加入增穩(wěn)控制系統(tǒng)后, 飛機的快捷性和操縱功效有待改進。
3.2對總距操縱響應(yīng)的檢驗
在飛機的高度通道加入幅值為20的階躍信號, 根據(jù)仿真結(jié)果可知, 14個飛行狀態(tài)點下飛機的法向速度變化基本為一階形狀, 1.5 s末的法向速度最小為0.89 m/s, 都能達到1級品質(zhì)的要求。
3.3對軸間耦合的檢驗
取飛行狀態(tài)點4, 首先在高度通道加入幅值為10的階躍輸入, 根據(jù)仿真結(jié)果得出|r1/w(3)|=0.71, r3/|w(3)|=-0.63, 可知該耦合效應(yīng)達到等級2。 同理可知, 俯仰-滾轉(zhuǎn)通道也存在一定的耦合效應(yīng), 有必要針對上述2個通道設(shè)計解耦控制器。
4控制律設(shè)計
由第3節(jié)中的仿真驗證及分析可知, 飛機滾轉(zhuǎn)通道的帶寬與延遲時間、 阻尼比和總距操縱品質(zhì)指標都達到1級品質(zhì); 快捷性、 操縱功效和軸間耦合品質(zhì)指標有待提高。 本節(jié)中, 使用按輸入補償?shù)那梆佇U椒ǎ?在飛機原有機械通道的基礎(chǔ)上加入前饋電氣通道, 提高飛機的快捷性和操縱功效; 使用按擾動補償?shù)那梆佇U椒ǎ?在飛機的俯仰和高度通道中引出解耦通道, 抑制軸間耦合。
4.1增控通道的設(shè)計
根據(jù)傳遞函數(shù)G(s)的頻域特性可知, 低頻時幅值大且相位滯后小, 高頻時相反, 這樣的特性正好體現(xiàn)了飛行品質(zhì)規(guī)定對不同姿態(tài)變化響應(yīng)的具體要求。
4.1.1參數(shù)k的設(shè)計
(1) 根據(jù)快捷性要求設(shè)計參數(shù)
快捷性1級品質(zhì)的要求如圖4所示, 為了方便設(shè)計, 把劃分等級的曲線近似為分段直線, 如圖4中虛線所示。
分別在原有機械通道和新加入的前饋電氣通道輸入幅值為20的階躍信號, 通過仿真試驗得出: 經(jīng)過機械通道, 飛機滾轉(zhuǎn)角響應(yīng)的最大值為pk1、 最小值為min1, 最大滾轉(zhuǎn)角速度為ppk1; 當前饋通道的增益為1時, 滾轉(zhuǎn)角的最大值為pk2、 最小值為min2, 最大滾轉(zhuǎn)角速度為ppk2。
式中: k0, k和T均為正數(shù), 由于k0Tk0+k
4.2解耦通道的設(shè)計
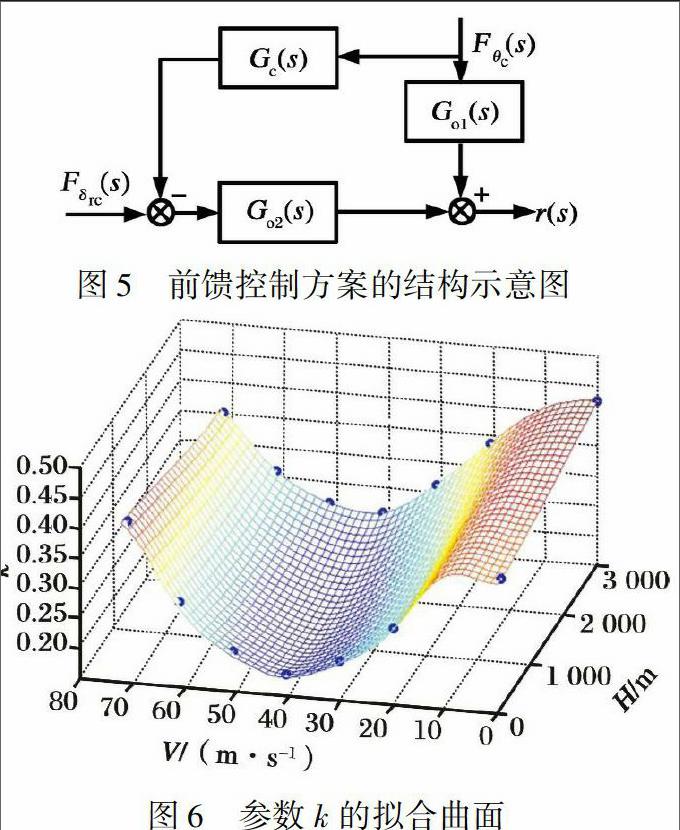
解耦控制系統(tǒng)的工作原理為當駕駛員操縱飛機引起期望之外的響應(yīng)時, 可以把操縱量看作期望外響應(yīng)的干擾輸入, 設(shè)計該操縱量到期望外響應(yīng)對應(yīng)操縱輸入的前饋通道, 用來抵消該操縱量引起的期望外響應(yīng)。 以高度到航向通道的解耦控制器設(shè)計為例, 相應(yīng)方案的示意圖如圖5所示。
取飛行狀態(tài)點4, 針對增穩(wěn)后的飛機模型, 使用MATLAB中的linmod()函數(shù), 計算出傳遞函數(shù)Go1(s)和Go2(s), 經(jīng)過化簡后, 可得高度到航向通道解耦控制器的傳遞函數(shù)Gc(s)。
經(jīng)過仿真可得, 加入解耦控制器后, 飛行員對總距桿輸入相同幅度的階躍量時, |r1/w(3)|的值從0.71減小為0.21; r3/|w(3)|的值從-0.63變?yōu)?0.14, 且品質(zhì)等級達到1級。 由此可得, 解耦控制器Gc(s)可以有效抑制高度到航向通道的交聯(lián)耦合。 同理, 可以設(shè)計出俯仰到滾轉(zhuǎn)的解耦控制器。
4.3全包線控制律實現(xiàn)
針對不同飛行狀態(tài)點(具體描述見表1), 分別設(shè)計控制器; 并以其參數(shù)為樣本, 按照嚴格徑向基神經(jīng)網(wǎng)絡(luò)的算法[7-8], 使用newrbe()函數(shù)分別得到前饋控制器和解耦控制器傳遞函數(shù)參數(shù)的神經(jīng)網(wǎng)絡(luò)擬合曲面(其中, 解耦控制器可以整理為尾1標準型, 即分子、 分母各次項系數(shù)和開環(huán)增益k)。
以開環(huán)增益k為例, 其擬合曲面如圖6所示。 可以看出擬合曲面連續(xù)、 光滑, 較好地反映了k在包線內(nèi)的變化趨勢。 相比之下, 速度變化對k的影響較大, 高度變化對k的影響較小, 客觀反映了速度對直升機特性影響較大的事實。
5仿真驗證
以滾轉(zhuǎn)通道為例檢驗飛機姿態(tài)響應(yīng)的品質(zhì)等級。 分別對表1中所有飛行狀態(tài)點對應(yīng)的模型進行仿真, 驗證加入控制增穩(wěn)系統(tǒng)后直升機的動態(tài)響應(yīng), 以及各飛行品質(zhì)指標所能達到的等級。 由于加入前饋環(huán)節(jié)不改變控制系統(tǒng)的極點, 故不再驗證系統(tǒng)的阻尼比。 由于高度通道沒有加入前饋增控環(huán)節(jié), 故總距的響應(yīng)與3.2節(jié)中相同, 不再驗證。
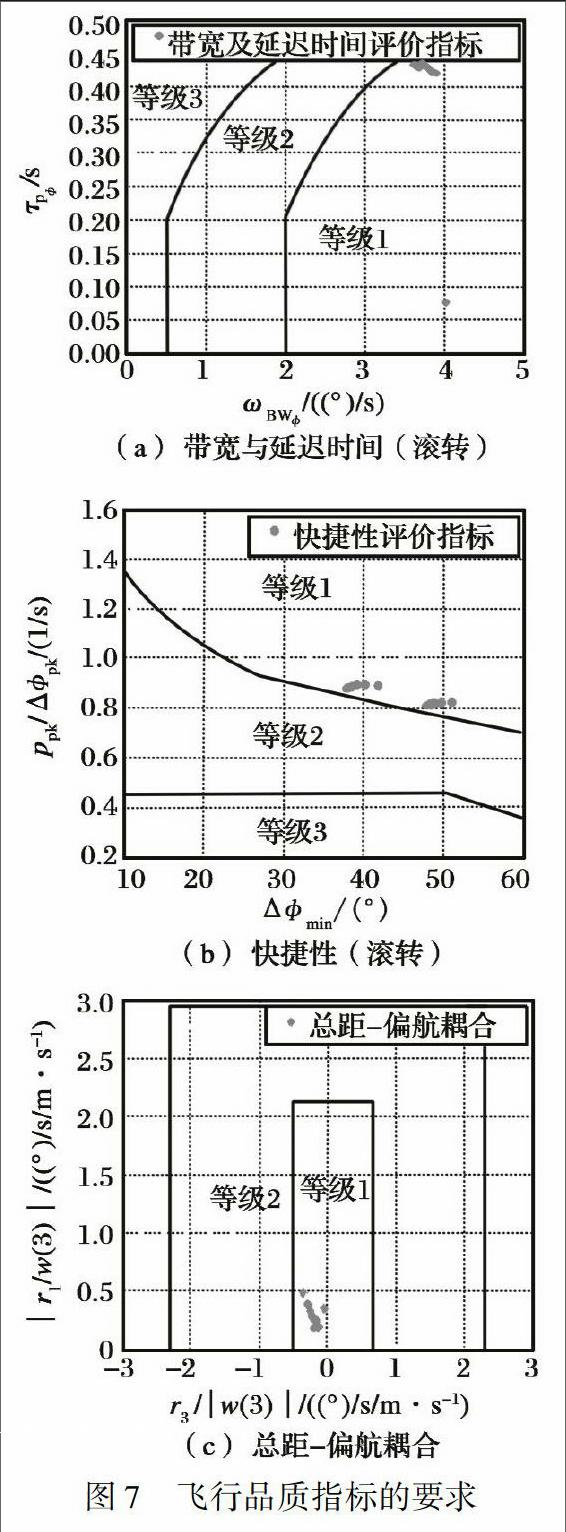
加入前饋增控通道和解耦控制器后, 系統(tǒng)的仿真框圖見圖7。
飛行品質(zhì)指標的要求如圖7所示。
由圖7(a)可以看出, 飛機的帶寬與延遲時間雖然能夠達到1級品質(zhì), 但是, 加入前饋通道后帶寬變窄, 延遲時間變長。 對比飛行狀態(tài)4對應(yīng)的數(shù)據(jù)發(fā)現(xiàn)帶寬ωBW從5變?yōu)?.68; 延遲時間τp從0.05變?yōu)?.44。 圖7(b)反映出快捷性指標可以達到1級品質(zhì), 飛行狀態(tài)點5對應(yīng)的具體數(shù)據(jù)為ppk/Δpk=0.89, Δpk=Δmin=39.26, 同時Δmin>25說明操縱功效滿足了1級品質(zhì)的要求。 圖7(c)給出了總距到航向通道軸間耦合的檢驗結(jié)果, 可以看出在全部飛行狀態(tài)點處, 該指標都滿足1級品質(zhì)指標的要求。
6結(jié)論
針對已實現(xiàn)增穩(wěn)控制的直升機模型, 本文按照飛行品質(zhì)規(guī)范ADS-33E中的有關(guān)規(guī)定, 評價了品質(zhì)指標的等級。 由于飛機的快捷性和操縱功效沒有達到1級品質(zhì), 故基于按輸入補償?shù)那梆伩刂圃恚?設(shè)計出增控環(huán)節(jié); 針對飛機軸間耦合嚴重、 品質(zhì)等級指標較低的實際情況, 基于按擾動補償?shù)那梆伩刂圃恚?設(shè)計出解耦控制器。 經(jīng)過仿真驗證和數(shù)據(jù)對比可以看出, 加入增控環(huán)節(jié)和解耦控制器后, 飛機的快捷性、 操縱功效顯著提高, 軸間耦合明顯減輕, 所考核檢查的指標均可以達到1級標準, 仿真結(jié)果證明所采用的控制增穩(wěn)方法可以達到較好的控制效果。
參考文獻:
[1] 楊一棟. 直升機飛行控制[M].北京: 國防工業(yè)出版社, 2007: 25-30.
[2] ADS33E, Handling Qualities Requirements for Military Rotorcrafts[S].United States Army Aviation and Troop Command, 1996.
[3] 榮裊錄.直升機飛行品質(zhì)設(shè)計方法研究[D]. 南京: 南京航空航天大學, 2007.
[4] 趙鵬軒. 直升機過渡懸停及纜位纜高控制律設(shè)計與仿真[D].西安: 西北工業(yè)大學, 2011.
[5] 凌瓊. 直升機控制律設(shè)計[D]. 西安: 西北工業(yè)大學, 2008.
[6] 韓旭, 侯明善, 姚成法.基于區(qū)間系統(tǒng)的魯棒H∞飛行控制系統(tǒng)設(shè)計[J].航空兵器, 2007(3): 20-24.
[7] 陳龍勝, 姜長生.基于在線神經(jīng)網(wǎng)絡(luò)的無人機著陸飛行自適應(yīng)逆控制器設(shè)計[J].航空兵器, 2009(3): 22-27.
[8] Hagan M T, Demuth H B, Beale M K. Neural Network Design[M].戴葵, 譯. 北京: 機械工業(yè)出版社, 2002.
猜你喜歡
數(shù)字技術(shù)與應(yīng)用(2016年10期)2017-04-01 15:58:06
物流科技(2016年12期)2017-04-01 03:06:34
科教導刊(2016年33期)2017-02-27 11:00:52
預測(2016年3期)2016-12-29 18:57:28
中國科技博覽(2016年10期)2016-04-29 05:26:16
科技與創(chuàng)新(2015年18期)2015-09-11 22:39:35
物聯(lián)網(wǎng)技術(shù)(2015年5期)2015-07-18 14:04:12
中國高新技術(shù)企業(yè)(2015年18期)2015-05-20 05:28:22
農(nóng)業(yè)科技與裝備(2014年2期)2014-11-28 21:10:29
科技視界(2014年19期)2014-08-12 21:01:45