
大滯后系統(tǒng)中單神經(jīng)元PID控制器設(shè)計
2015-07-18 14:04:12蘭天杜堅吉寧凌景秀
物聯(lián)網(wǎng)技術(shù) 2015年5期
關(guān)鍵詞:系統(tǒng)仿真
蘭天++杜堅++吉寧++凌景秀

摘 要:首先介紹單神經(jīng)元PID控制的原理和算法,而后用Matlab語言建立控制器。在二階大滯后系統(tǒng)中基于單神經(jīng)元的PID控制存在響應速度慢的缺點,所以用Smith預估控制與單神經(jīng)元PID控制相結(jié)合,對大滯后系統(tǒng)仿真,發(fā)現(xiàn)在一定程度上加快了響應速度,并且魯棒性強。
關(guān)鍵詞:PID控制;單神經(jīng)元PID控制器;Smith預估控;系統(tǒng)仿真;
中圖分類號:TP273.4 文獻標識碼:A 文章編號:2095-1302(2015)05-00-02
0 引 言
PID控制器具有算法簡單、魯棒性較好、可靠性高的特性,因而被廣泛運用于各種各樣的工業(yè)控制中[1],特別在被控對象是線性時不變且方便建立數(shù)學模型的控制系統(tǒng)的情況下。然而在工業(yè)實際生產(chǎn)過程中,完全的線性時不變系統(tǒng)是不存在的,一般都是非線性時變系統(tǒng),并且難以建立數(shù)學模型,參數(shù)整定困難,運用一般的PID控制器控制系統(tǒng)很難達到理想效果。因此本文以研究最基本的神經(jīng)網(wǎng)絡PID控制和單神經(jīng)元PID控制為主,輔助研究BP神經(jīng)網(wǎng)絡。
1 PID控制的原理和算法
1.1 基于單神經(jīng)元的PID控制原理
由具有自學習和自適應能力的單神經(jīng)元構(gòu)成的單神經(jīng)元智能PID控制器,不但結(jié)構(gòu)簡單,而且能適應環(huán)境變化,有較強的魯棒性。單神經(jīng)元結(jié)構(gòu)PID控制本質(zhì)是用單神經(jīng)元的權(quán)系數(shù)來代替PID控制器的三個參數(shù)[2]。單神經(jīng)元PID自適應控制,是將單神經(jīng)元與PID相結(jié)合,單個神經(jīng)元具有自適應和自學習能力,PID控制采用增量式PID控制算法,因此可用單神經(jīng)元實現(xiàn)PID控制,其原理結(jié)構(gòu)圖如圖1所示。
圖1 單神經(jīng)元PID自適應控制原理結(jié)構(gòu)圖
1.2 基于單神經(jīng)元的PID控制算法
單神經(jīng)元PID控制器,是通過在線對加權(quán)系數(shù)地調(diào)整來整定PID的三個參數(shù),實現(xiàn)自適應、自組織的功能。考慮到加權(quán)系數(shù)應和神經(jīng)元的輸入、輸出和輸出偏差的相關(guān)函數(shù)有關(guān),因此按有監(jiān)督的Hebb學習規(guī)則來實現(xiàn)權(quán)值的調(diào)整。Rin(k)為設(shè)定值,Yout(k)為被控對象的輸出,經(jīng)微積分模塊計算的三個量X為神經(jīng)元學習和控制所需的狀態(tài)量,其控制及學習算法為:
式中:
: 。ηP,ηI,ηD表示積分、比例、微分的學習速率,K為神經(jīng)元的比例系數(shù),K>0。為了對各個權(quán)系數(shù)分別進行在線調(diào)整,給積分I、比例P和微分D選用不同的學習速率ηP,ηI,ηD。可以通過增大ηI來加快響應速度,但是與之同時超調(diào)量也將增大;當超調(diào)量增大時可以通過增大ηP來減小超調(diào),但是響應速度將會變慢,調(diào)節(jié)時間將會增加;增大ηD可以進一步的減小超調(diào),但是調(diào)節(jié)時間會延遲[3]。
K值的選擇非常重要。K越大,快速性越好,但超調(diào)量大,甚至可能使系統(tǒng)不穩(wěn)定。但是當被控對象延時增加時,必須減少K值,來保證系統(tǒng)穩(wěn)定。K值選擇過小,會使系統(tǒng)的快速性變差。
實踐表明,在大量的實際應用中,在線學習修正PID參數(shù)主要與e(k)和Δe(k)有關(guān)。因此將單神經(jīng)元自適應PID控制算法中的加權(quán)系數(shù)學習修正部分進行修改,將其中的xi(k)改為e(k)+Δe(k)[4]。
2 仿 真
2.1 大滯后系統(tǒng)
在一些如熱工、化工等工業(yè)控制中,由于能量或者物料的傳輸延遲,很多被控對象都具有純滯后特性。例如,蒸汽控制水溫的控制系統(tǒng),蒸汽量的改變是一個過程量,需要經(jīng)過一個長度為S的路程才能反映出來。這樣,水溫要想改變就需要一個滯后時間t。但是附加了純滯后的被控對象可控度會明顯降低,使系統(tǒng)的穩(wěn)定性下降。一般,當過程的純滯后時間與過程的主導時間常數(shù)之比超過0.5時,該過程被稱為大滯后過程。采用常規(guī)的PID控制,要達到維持系統(tǒng)穩(wěn)定的目的,就必須將控制作用變?nèi)酰蚨诤芏嗟胤蕉疾荒苓_到滿意的控制效果[5]。
設(shè)二階被控對象為:
考慮到工程實際,取采樣時間為1 s,仿真時間為500 s,采用傳統(tǒng)PID、Smith預估控制和SNPID(單神經(jīng)元PID控制)控制對被控對象在Matlab里采用Matlab語言仿真,并在保持控制器參數(shù)不變的情況下,改變被控對象參數(shù),分析控制系統(tǒng)的動態(tài)性能的改變后得出:傳統(tǒng)PID控制大滯后系統(tǒng)很難滿足系統(tǒng)的要求,而Smith預估控制和SNPID控制都能很好地控制系統(tǒng),并且Smith響應速度快于SNPID控制,但是當被控對象參數(shù)發(fā)生變化或者系統(tǒng)加入擾動時,Smith預估控制的超調(diào)量較大,穩(wěn)定性沒有SNPID控制系統(tǒng)好并且Smith預估控制需要獲得被控對象的精確數(shù)學模型,對模型的變動十分靈敏,這就限制了其在實際工業(yè)中的應用。所以當被控對象具有大滯后環(huán)節(jié)時,可以選擇Smith控制或SNPID控制,若被控對象在控制過程中具有慢時變性,可以優(yōu)先選擇SNPID控制。基于Smith預估控制與PID結(jié)合的思想,提出SNPID控制與Smith預估控制相結(jié)合的方法。
2.2 仿真結(jié)果
借鑒Smith預估PID的控制思想,把單神經(jīng)元PID控制和Smith預估控制相結(jié)合,來解決大滯后系統(tǒng)的響應速度和魯棒性的問題。仿真結(jié)果如圖2所示。
圖2 單神經(jīng)元PID控制結(jié)合Smith預估控制響應曲線
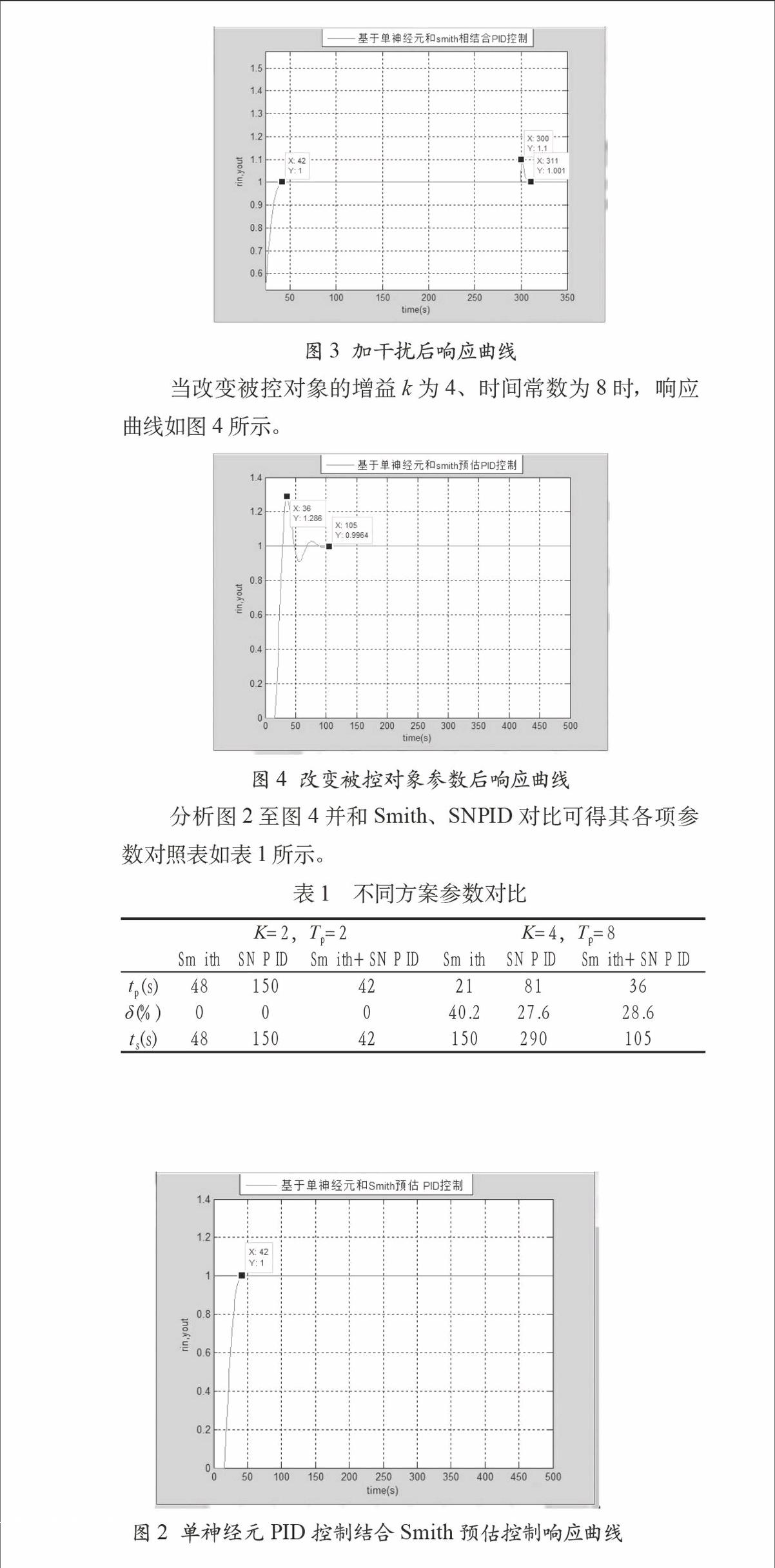
當t=300 s時,被控對象的輸出端在0.1的干擾信號其響應曲線如圖3所示。
圖3 加干擾后響應曲線
當改變被控對象的增益k為4、時間常數(shù)為8時,響應曲線如圖4所示。
圖4 改變被控對象參數(shù)后響應曲線
分析圖2至圖4并和Smith、SNPID對比可得其各項參數(shù)對照表如表1所示。
表1 不同方案參數(shù)對比
K=2,Tp=2 K=4,Tp=8
Smith SNPID Smith+SNPID Smith SNPID Smith+SNPID
tp(s) 48 150 42 21 81 36
δ(%) 0 0 0 40.2 27.6 28.6
ts(s) 48 150 42 150 290 105
3 結(jié) 語
由仿真結(jié)果可知在沒有超調(diào)量指標的前提下,單神經(jīng)元和Smith預估控制相結(jié)合的PID控制器其控制效果優(yōu)于兩種控制方法的單獨控制(穩(wěn)定時間短),當系統(tǒng)參數(shù)發(fā)生改變時,該控制算法體現(xiàn)出單神經(jīng)元PID控制抗干擾能力強和Smith響應速度快的優(yōu)點。因此對于工程中實際的大滯后系統(tǒng)(如爐溫控制,一般為二階慣性環(huán)節(jié)加延遲環(huán)節(jié)),運用Smith預估控制和單神經(jīng)元PID控制相結(jié)合的算法能得到不錯的控制效果。
參考文獻
[1] 蔡自興.智能控制工程研究的進展[J]. 控制工程,2003,10(1):1-5.
[2] 舒懷林. PID神經(jīng)元網(wǎng)絡及其控制系統(tǒng)[M]. 北京:國防工業(yè)出版社,2006.
[3] 張玉濃.神經(jīng)網(wǎng)絡權(quán)值直接確定法[M].廣州:中山大學出版社,2010.
[4] 陽帥.一種改進的單神經(jīng)元PID控制器[J].制造業(yè)自動化,2010,32(11):119-121.
[5] 徐英.時變大滯后系統(tǒng)的單神經(jīng)元預測控制[J].清華大學學報(自然科學版),2002, 42(3):383-386.
猜你喜歡
數(shù)字技術(shù)與應用(2016年10期)2017-04-01 15:58:06
物流科技(2016年12期)2017-04-01 03:06:34
科教導刊(2016年33期)2017-02-27 11:00:52
預測(2016年3期)2016-12-29 18:57:28
航空兵器(2016年4期)2016-11-28 21:34:37
中國科技博覽(2016年10期)2016-04-29 05:26:16
科技與創(chuàng)新(2015年18期)2015-09-11 22:39:35
中國高新技術(shù)企業(yè)(2015年18期)2015-05-20 05:28:22
農(nóng)業(yè)科技與裝備(2014年2期)2014-11-28 21:10:29
科技視界(2014年19期)2014-08-12 21:01:45
