全電推進衛星平臺現狀與進展
2016-11-27 08:51:36魏冰潔孫小菁王小永
真空與低溫 2016年5期
魏冰潔,孫小菁,王小永
(蘭州空間技術物理研究所真空技術與物理重點實驗室,蘭州730000)
全電推進衛星平臺現狀與進展
魏冰潔,孫小菁,王小永
(蘭州空間技術物理研究所真空技術與物理重點實驗室,蘭州730000)
全電推進技術的應用能夠大幅縮減衛星推進劑攜帶量,增加有效載荷,是降低商業通信衛星研制及發射綜合費用贏得市場的重要途徑。在調研國內外全電推進平臺的基礎上,給出全電推進早期發展歷史、現階段技術特點、研究現狀和未來發展趨勢,為未來我國全電推進平臺的開發研制提供有價值的參考。
全電推進平臺;研究現狀;技術特點
0 引言
地球同步軌道通信衛星的競爭日趨激烈,采取措施降低衛星研制及發射綜合費用是贏得市場的重要途徑。中小型通信衛星既可用于新興市場的探索性開拓,也可以用于接替衛星市場,據預測,2013~2022年期間發射的重量4 200 kg以下的中小型通信衛星市場需求將占到40%,低成本中小型通信衛星將在國際市場占據重要地位[1-4]。
全電推系統采用高比沖的電推進系統(如離子電推進或霍爾電推進等)來實現星箭分離后的衛星軌道轉移、衛星入軌后的在軌位置保持、動量輪卸載及離軌等任務,取代復雜的雙組元統一推進系統,可大幅縮減衛星的推進劑攜帶量,在承載同等有效載荷重量情況下可使衛星發射重量下降約一半,從而可實現中小型通信衛星的一箭雙星發射,有效降低綜合研制費用。
目前,國際主流通信衛星研制商均開展了全電推衛星平臺開發。基于波音公司全電推平臺702SP的兩顆通信衛星于2015年通過一箭雙星方式進行發射。我國從2000年開始發射的多顆中等容量通信衛星,目前開始陸續達到服務壽命,需要發射接替衛星,采用全電推衛星平臺將有效的滿足商業通信衛星市場的低成本要求[5-6]。
1 國外全電推進技術研究
國外從20世紀50年代起就對電推進技術進行大規模的理論與試驗研究,于20世紀80年代實現了電推進系統的空間商業應用,早期的電推進技術研究與產品研制主要針對單模式電推進,推力器輸入功率大都在1 kW量級,主要目標為GEO衛星南北位保。在單模式電推進得到廣泛和成熟應用后,20世紀末將電推進技術研究的重點轉向針對GEO衛星軌道控制、軌道轉移以及深空探測等多任務應用的多模式電推進領域,主要的研究國家有美國、俄羅斯、日本、英國、德國和法國等,其中美國、日本、英國和德國的研究重點為離子電推進,俄羅斯與法國則主要針對霍爾電推進開展研究,各個國家經過十多年的努力,多款多模式電推進系統相繼研制成功并完成了大量地面試驗驗證,部分多模式電推進系統在GEO衛星平臺上得到了廣泛應用[7-13]。
1.1美國
美國波音公司于1999年成功研制出了雙模式高性能離子電推進系統—XIPS-25氙離子電推進系統,主要針對新一代高功率通信衛星平臺—BBS-702HP開發和研制,系統最高輸入功率4.5 kW,具有高功率大推力和低功率高比沖兩種工作模式,分別應用于衛星軌道提升或軌道轉移和衛星位置保持[4]。1999年12月,XIPS-25離子電推進系統首次成功應用于Galaxy 11大型通信衛星執行衛星南北位保任務,此后XIPS-25在BBS-702HP平臺各種衛星上得到廣泛應用,承擔衛星在軌工作期間的南北位保任務,以及變軌末期的GEO軌道圓化等部分軌道轉移任務。截至2013年底,使用XIPS-25離子電推進系統的衛星總數達到了20顆[14-16]。
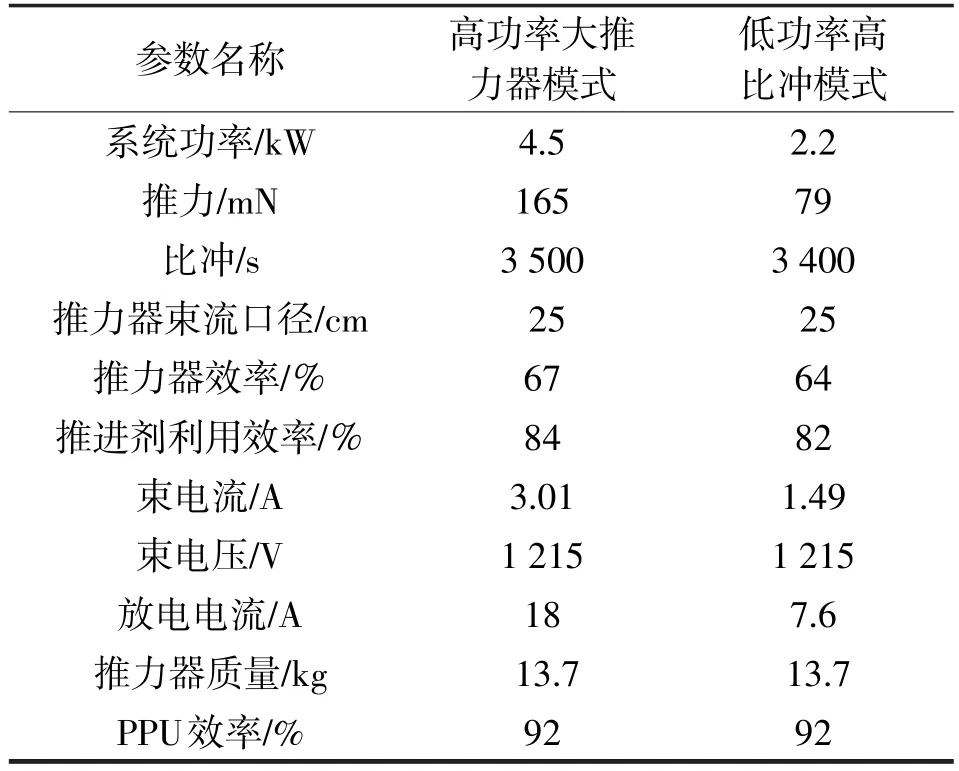
表1 XIPS-25離子電推進系統主要技術指標與工作參數
2010年,波音公司向全世界宣布正式啟動全球首個全電推進衛星平臺—BBS-702SP平臺開發計劃,其特點是取消了雙組元化學推進,采用基于XIPS-25雙模式離子電推進系統的全電推進技術,以實現衛星變軌與位置保持等所有推進任務,顯著降低了衛星規模[17]。BBS-702SP平臺本體尺寸1.8 m、1.9 m、3.5 m,起飛重量不超過2 000 kg,有效載荷重量500 kg,每顆衛星上共配置4臺XIPS-25離子推力器,變軌階段2臺推力器同時工作,主要用于深空探測任務[5]。
2015年3月2日,歐洲通信衛星公司(EUTELSAT)的Eutelsat-115West B和亞洲廣播衛星公司(ABS)的ABS-3A,采用一箭雙星方式成功發射,這是全球首個全電推進衛星平臺—波音公司BBS-702SP平臺的首次發射。同年9月ABS-3A和Eutelsat-115分別先后抵達預定軌道開始工作。XIPS-25因此成為全球第一個,也是截至目前唯一一個應用于全電推進衛星平臺的多模式電推進系統,如圖1所示。

圖1 XIPS-25離子推力器和PPU
除離子電推進外,美國也同步開展了霍爾電推進技術研究與產品開發工作。洛克希德·馬丁公司針對A2100M平臺應用,于1998年前后與Aemiet公司聯合發展了5 kW多模式霍爾電推進—BPT-4000,該系統中霍爾推力器輸入功率為3.0~4.5 kW,比沖為1 769~2 076 s,推力為168~294 mN,工作電壓為300~400 V,壽命超過6 000 h。基于A2100M平臺的先進極高頻大型軍用通信衛星已于2010~2013年期間發射成功[18-19]。2013年9月,洛馬公司開始對A2100M平臺進行全電推進升級改造,將使用更大推力的霍爾推力器減少衛星入軌時間,并且支持一箭雙星發射[7]。
1.2俄羅斯
俄羅斯是世界上最早開展電推進技術研究的國家,首先在霍爾電推進技術上取得了突破,并于1982年在世界上率先實現了電推進技術的空間應用,代表性產品有輸入功率為1.35 kW的SPT-100低功率單模式霍爾電推進器,應用領域主要為GEO衛星南北位置保持。20世紀90年代SPT系列霍爾電推進產品廣泛進入商業化應用階段[20-21]。
在SPT-70和SPT-100得到廣泛、成熟的商業應用后,2002年前后開發出了輸入功率為4.5 kW的多模式霍爾電推進系統—SPT-140,如表2所列。俄羅斯通常利用火箭的上面級使用直接入軌式將衛星送入軌道,再利用霍爾推力器進行衛星的位置保持,達到了全電推進平臺減少推進劑攜帶量,增加有效載荷的目的。2013年12月俄羅斯衛星通信公司(RSCC)發射的Express-AM5衛星,使用霍爾推力器完成軌道轉移,于2014年3月進入預定工作軌道,成功驗證了霍爾電推進技術完成軌道提升任務的能力,為未來全電推進衛星研制打下堅實的基礎[8,22-23]。

表2 俄羅斯SPT-140霍爾推力器主要技術指標與工作參數
1.3日本
日本東芝公司針對GEO衛星軌道轉移和星際探測應用,在單模式IE-12基礎上,開發研制了高功率多模式直流放電型離子推力器IE-35,該產品在實驗室模型5 000 h試驗中的性能為功率3.3 kW、推力器150 mN、比沖3 518 s,表3列出了該產品的主要性能拓展驗證結果。目前該產品仍處于地面開發與驗證階段,其性能達到了全電平臺高比沖大推力的需求,未來可用于全電推進衛星平臺的開發研制[24]。

表3 日本高功率多模式離子推力器IE-35主要性能
1.4歐洲
針對GEO衛星和深空探測器應用,為滿足全電平臺大功率高可靠性能需求,歐洲各國積極開展多模式電推進的研究。其中德國和英國的研究主要針對離子電推進,法國則面向霍爾電推進。
英國QinetiQ公司于90年代中期成功開發出多模式離子電推進產品T-6。該推力器束流直徑22 cm,最大額定功率4.5 kW,具有5種工作模式,應用目標為歐空局貝皮—科倫布(BepiColombo)水星探測器推進任務和歐空局AlphaBus通信衛星平臺南北位保及軌道提升任務[25-26]。

表4 英國T6推力器主要性能指標與工作參數
德國從1960年起就開始獨立發展射頻離子電推進系統,2001年12月,ESA的阿特米斯(Artemis)衛星采用兩套RIT-10和兩套英國T-5離子電推進系統進行衛星南北位保任務。RIT-22是德國針對歐洲水星探測使用和GEO衛星南北位保與軌道提升等未來大速度增量、高比沖任務需求所開發的一款多模式離子電推進系統,如表5所列[27-28]。
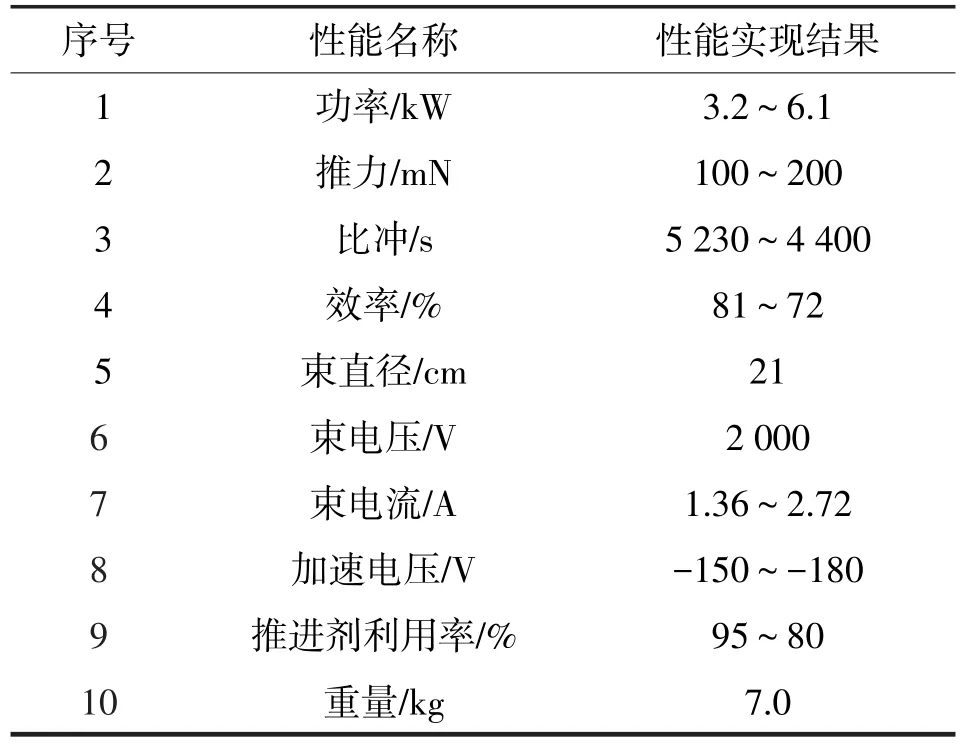
表5 德國高功率多模式離子推力器RIT-22主要性能
法國在引進SPT-100霍爾推力器的基礎上,成功研制了霍爾電推進PPS 1350-G系統,并成功應用于2003年9月27日發射的SMART-1月球探測器主推進任務。PPS 1350-G推力器額定功率1 500 W,推力89 mN,放電電壓350 V,比沖1 650 S。已經通過10 500 h的長壽命高可靠的實驗驗證。歐洲的新一代大型GEO平臺@Bus初期采用4臺PPS 1350-G霍爾推力器執行南北位置保持任務,后期將采用5 kW級的PPS 5000多模式霍爾推力器,擴展執行軌道提升任務[29]。PPS 5000霍爾推力器總沖超過7×106N·S,推力210~360 mN,比沖1 650~2 550 s,功率4.5~6 kW。在研制傳統結構霍爾推力器的同時,歐洲Thales公司于2000年左右提出了高效率多級等離子體推力器(High Efficient MultistagePlasma thrust?er,HEMP)的多模式霍爾推力器,其采用軸向串聯的多級磁場拓撲結構,大大降低等離子體對放電室壁的碰撞和削蝕,實現長壽命。HEMP將在Small GEO平臺上進行在軌試驗[30-31]。
2013年,ESA和OHB與SES(盧森堡歐洲衛星公司)聯合開發全電推進衛星平臺—Electra平臺,其基于OHB公司的SGEO平臺進行開發,基本配置為4臺大功率霍爾電推進器,每臺最大功率3.2 kW。首顆衛星計劃于2018年發射[32]。
2 國內全電推進技術研究
我國首個全電推進衛星平臺和下一代地球同步軌道衛星平臺均確定采用電推進系統,承擔衛星在軌期間的全位保和軌道轉移任務。國內從事電推進技術研究的單位較多,但開展空間應用產品開發與研制的單位只有510所、801所和502所三家單位,2013年之前,國內各單位電推進產品開發主要針對低功率單模式離子與霍爾電推進,并在這一領域取得了許多技術突破,積累了比較豐富的產品研制經驗,510所針對GEO衛星南北位保應用研制的LIPS-200離子電推進系統和801所開發的HET-70霍爾電推進系統于2013年底在SJ-9A衛星上完成了空間飛行試驗,系統對空間環境的適應性以及在軌工作穩定性、可靠性和與衛星間的工作相容性得到了良好驗證。2012年,510所的LIPS-200電推進入選我國中等容量通信衛星平臺電推進分系統標準配置,承擔衛星在軌全壽命周期中的南北位保任務,這是我國電推進產品的首次空間應用,目前LIPS-200電推進已進入AIT階段,同時完成了離子推進地面1∶1壽命驗證,累計點火時間超過12 000 h、開關機次數超過6 000次,試驗結果表明,LIPS-200離子電推進系統已經具備確保衛星在軌可靠運行15年以上的能力,且具有較大的壽命裕度空間。同時,也標志著我國在離子電推進長壽命與高可靠方面取得了重大進展和重要技術突破。
近10年來,國內在電推進技術研究與產品研發方面取得了快速發展,離子與霍爾兩種國際主流電推進系統研制所涉及的許多關鍵技術陸續得到解決與突破,多種類型、不同規格的單模式電推進產品相繼研制成功,并完成或即將開展在軌飛行試驗,針對通信衛星的全電推進平臺也在開發研制過程中。為我國電推進產品的航天型號應用奠定了良好的技術與產品基礎,與國外航天技術先進國家之間在電推進領域的技術與產品差距顯著縮小。
3 全電推進技術發展趨勢及特點
3.1發展趨勢
全面分析國內外全電推進的技術發展、產品研制與空間應用,可以看出,全電推進具有兩個方面的技術發展趨勢。
(1)以成熟的單模式電推進基礎開展多模式技術開發研究,無論是美、俄還是歐、日,針對多模式電推進的技術研究與產品研制都是在充分繼承已得到廣泛應用或飛行驗證的單模式電推進技術與產品基礎上來開展,如美國XIPS-25的研制基于XIPS-30技術與應用的成熟性;俄羅斯的SPT-140是在SPT-100得到廣泛應用,技術已達到成熟與穩定基礎上開發的;英國的T-6、德國的RIT-22和日本的IE-35也分別是在T-5、RIT-10和IE-12等單模式電推進實現航天應用的基礎上通過進一步的設計增強與改進開展產品的開發與研制工作。
(2)各推力器生產商充分考慮技術的繼承性,美、俄、日、歐等航天機構,正在依據各自在電推進領域的技術優勢,分別在同步、并行開展離子與霍爾兩種多模式電推進技術研究、產品開發與研制及型號應用等工作,其中英國、德國與日本以離子型為主,俄羅斯和法國則主要針對霍爾類型,美國在離子與霍爾兩種類型上同時都在開展工作。
3.2技術特點
(1)大功率、高效率。僅針對GEO衛星南北位保應用的單模式電推進相比,國外多模式電推進的性能大幅提高,離子電推進的推力從單模式的幾十mN提高到了大推力模式下的200 mN左右,以適應GEO衛星軌道提升或軌道轉移時間要求,最高比沖也從2 000~3 000 s之間提高至4 000 s左右;霍爾電推進的推力也從幾十mN提高到了大推力模式下的接近300 mN以適應GEO衛星軌道提升或軌道轉移時間要求,最高比沖也從1 500 s左右提高至2 000 s以上。推力指標的提高也極大地提升了系統或推力器對輸入功率的需求,國外多模式電推進,無論是離子還是霍爾,其推力器最高工作功率基本上都在5.0 kW左右,與單模式相比整整提高了3~5倍。同時對于多模式電推進,離子推力器電效率控制在72%~80%左右,推進劑利用率在75%~90%左右,霍爾推力器電效率60%~70%,相比單模式都有所提升。
(2)高可靠、長壽命。由于全電推進不僅要承擔南北位保、東西位保、動量輪卸載等衛星在軌期間的軌道控制任務,而且還要完成衛星軌道提升或全部軌道轉移任務,全電推進衛星平臺將完全取消原有的化學推進,衛星從星箭分離后的所有推進任務全部由電推進系統承擔,多任務使命對其工作壽命與可靠性提出了更高要求。多模式下離子推力器總比沖能夠達到4 000 s,最高能達到5 200 s,霍爾推力器可以達到2 100 s,與單模式相比提高了30%~40%。
4 總結
國外針對全電推進衛星平臺,開展了大量的研究工作,已突破多項關鍵技術,國內研究也緊跟著其發展趨勢。通過比較國內外全電推進技術特點,結合我國電推進技術發展現狀,建議我國全電推進技術發展方向:充分利用我國已開展的離子、霍爾推力器研究成果,以成熟的單模式電推進為基礎,開展多模式電推進技術研究。通過對推力器放電室、柵極技術優化,提高推力器的輸出能力和比沖。合理設計不同工作模式下推力器的工作參數,確保各模式下推力器性能的匹配。并積極開展多模式電推進器和全電推進系統的仿真模擬研究。
[1]段傳輝,陳荔瑩.GEO衛星全電推進技術研究及啟示[J].航天器工程,2013,22(3):99-104.
[2]張天平,田華兵,孫運奎.離子推進系統用于GEO衛星南北位保使命的能力與效益[J].真空與低溫,2010,16(2):72-77.
[3]張肇瑞,陳菲全.全電推進衛星余震尚存[J].衛星與網絡,2013(5):14-14.
[4]De Tata M,Frigot P E,Beekmans S,et al.SGEO electric pro?pulsion subsystem developmentstatusand future opportunities [C]//Proc 33rd IntElectrPropuls Conf,2013:1-15.
[5]Feuerborn S A,Neary D,Perkins J.Finding a way:Boeing’s all electric propulsion satellite[C]//49th Joint Propulsion Con?ference,2013.
[6]Lichtin DA.An overview ofelectric propulsion activitiesin US industry-2005[C]//AIAAPaper,2005:3532.
[7]FisherJ,Wilson A,King D,etal.The developmentand qualifi?cation of a 4.5 kW Hall thruster propulsion system for GEO satellite applications-status update[C]//28th international electric propulsion conference,Toulouse,2003.
[8]Randolph T M.Qualification of commercial electric propulsion systemsfordeep space missions[C]//30th InternationalPropul?sion Conference,IEPC Paper,2007:17-20.
[9]Duchemin B,Caratge A,Cornu N,etal.Araine5-MEand elec?tric propulsion:GEO insertion options[C]//Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference& Exhibit,2011:1-15.
[10]Auweter-Kurtz M,Kurtz H.Optimization of electric thrusters for primary propulsion based on the rocket equation[J].Jour?nalofpropulsion and power,2003,19(3):413-423.
[11]Co T C.Operationally Responsive Spacecraft Using Electric Propulsion[D].Air Force Inst.of Tech,Wright-Patterson Air Force,Base,Ohio,2012.
[12]Barocela E,Cassidy P F.Delta-winged hybrid airship:U.S. Patent7093789[P].2006-8-22.
[13]Feuerborn S A,Neary D,Perkins J.Finding a way:Boeing’s all electric propulsion satellite[C]//49th Joint Propulsion Conference,2013.
[14]Goebel D M,Martinez-Lavin M,Bond T A,et al.Perfor?mance of XIPS electric propulsion in on-orbit station keep?ing ofthe Boeing 702 spacecraft[C]//AIAAPaper,2002.
[15]Tighe WG.Performanceevaluation ofthe XIPS 25 cm thruster forapplication to NASAdiscoverymissions[C]//AIAA,2006.
[16]Oh D Y,Goebel D M.Performance evaluation of an expended range XIPS ion thruster system for NASA science missions [M].Pasadena,CA:Jet Propulsion Laboratory,National Aeronauticsand Space Administration,2006.
[17]Herman DA,Soulas GC,Patterson MJ.Performance Evalua?tion ofthe Prototype-ModelNEXT Ion Thruster[J].AIAAPa?per,2007:5212.
[18]Beiting E J,Pollard J E,Khayms V,et al.Electromagnetic emissions to 60 GHz from a BPT-4000 EDM Hall thruster [C]//28th International Electric Propulsion Conference,2003:17-21.
[19]Hofer R R.BPT-4000 hall thruster discharge chamber ero?sion model comparison with qualification life test data[C]// IEPC,2007.
[20]Hofer R R,Mikellides I G,Katz I,et al.BPT-4000 Hall thruster discharge chamber erosion model comparison with qualification life testdata[C]//30th InternationalElectric Pro?pulsion Conference,2007:17-20.
[21]Kim V,Kozubsky K N,Murashko V M,et al.History of the Hall Thrusters Development in USSR[C]//Proceedings of the 30th International Electric Propulsion Conference,Flor?ence,2007:17-20.
[22]Hargus Jr W,Fife J M,Mason L,et al.Preliminary perfor?mance results of the high performance Hall system SPT-140 [R].AirForce Research Lab Edwards AFBCAPropulsion Di?rectorate West,2000.
[23]Fife J M,Hargus Jr W A,Jaworske D A,et al.Spacecraft In?teraction Test Results of the High Performance Hall System SPT-140(Postprint)[R].Air Force Research Lab Edwards AFBCAPropulsion Directorate,2000.
[24]Hoang T,Ross J,Doyle S,et al.A radiation hardened 16-Mb SRAMforspace applications[C]//2007 IEEE Aerospace Con?ference,2007:1-6.
[25]Roux M,Bertheux P.Alphabus,the european platform for large communications satellites[C]//The 25th International Communications Satellite Systems Conference,2007:1-7.
[26]Aguirre M,Tobias A,Schuyer M.Propulsion System for the Gravity and Ocean Circulation Explorer Mission[C]//Pa?perB2/1,Second European Spacecraft Propulsion Confer?ence(ESA-SP-398),1997.
[27]Bassner H,Hofmann J.Status of the ion propulsion package for Artemis and its Commercial Application[J].AIAA Paper,1995:95-2518.
[28]Killinger R,Bassner H,Kukies R,et al.RITA ion propulsion for ARTEMIS results close to the completion of the life test [C]//AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit37th SaltLake City,2001.
[29]EstublierD,KoppelC.SMART-1 EPS End-to-End Test:Fi?nal Results&Lessons Learnt[J].28th IEPC 2003,2003,303:17-21.
[30]Koppel C,Estublier D.SMART-1 primary electric propul?sion subsystem the flight model[C]//in Proc 28th IEPC,Tou?louse,France,2003:17-21.
[31]Koppel C,Marchandise F,Estublier D,et al.The SMART-1 electric propulsion subsystem in-flight experience,in Proc [C]//40th AIAA/ASME/SAE/ASEE JointPropulsion ConfEx?hib,FortLauderdale,FL,2004.
[32]Dutta A,Libraro P,Kasdin N J,et al.Design of next genera?tion all-electric telecommunication satellites[C]//AIAA In?ternational Communication Satellite Systems Conference,Florence,2013.
THE REVIEW OF ALL-ELECTRIC PROPULSION PLATFORM ON SATELLITE
WEI Bing-jie,SUN Xiao-jing,WANG Xiao-yong
(Science and Technology on Vacuum Technology and Physics Laboratory,Lanzhou Institute of Physics,Lanzhou 730000,China)
The application of All-Electric Propulsion Platform allows fewer propellant and more payload on satellite,which is an important approach to lower the research and launch costs of commercial communication satellites.Base on the investigation about the development of All-Electric Propulsion Platform,this paper introduces the early development history,current technical characteristics,research status and the prospects of All-Electric Propulsion Platform.It provides a reference on the development of All-Electric Propulsion Platform.
All-Electric Propulsion Platform;research status;technical characteristics
V439
A
1006-7086(2016)05-0301-06
10.3969/j.issn.1006-7086.2016.05.012
2016-06-14
魏冰潔(1989-),男,甘肅蘭州人,碩士研究生,主要從事空間電推進技術研究。E-mail:weibingjie@163.com。
