一種新型神經(jīng)網(wǎng)絡(luò)觀測(cè)器的設(shè)計(jì)與應(yīng)用
2016-11-22 09:10:08姜寅令李艷輝
化工自動(dòng)化及儀表 2016年9期
姜寅令 李艷輝
(東北石油大學(xué)電氣信息工程學(xué)院,黑龍江 大慶 163318)
一種新型神經(jīng)網(wǎng)絡(luò)觀測(cè)器的設(shè)計(jì)與應(yīng)用
姜寅令 李艷輝
(東北石油大學(xué)電氣信息工程學(xué)院,黑龍江 大慶 163318)
針對(duì)傳統(tǒng)線性觀測(cè)器只在操作點(diǎn)附近具有工作滿意度區(qū)間和傳統(tǒng)非線性觀測(cè)器對(duì)模型準(zhǔn)確度依賴較大的問(wèn)題,提出一種非傳統(tǒng)的神經(jīng)網(wǎng)絡(luò)觀測(cè)器設(shè)計(jì)方法。該神經(jīng)網(wǎng)絡(luò)是一個(gè)三層前饋網(wǎng)絡(luò),采用帶修正項(xiàng)的誤差反傳算法進(jìn)行訓(xùn)練以保證控制的精度和權(quán)值的有界。為降低對(duì)系統(tǒng)模型精度的依賴度,采用神經(jīng)網(wǎng)絡(luò)去識(shí)別系統(tǒng)的非線性部分,再結(jié)合傳統(tǒng)的龍伯格觀測(cè)器去重構(gòu)系統(tǒng)的狀態(tài)。利用Lyapunov直接法保證基于權(quán)值誤差的非傳統(tǒng)觀測(cè)器的穩(wěn)定性。最后將該觀測(cè)器應(yīng)用于機(jī)器人軌跡跟蹤控制中,仿真結(jié)果表明:該方法適用于模型精度較低的非線性系統(tǒng),可以滿足控制的要求。
神經(jīng)網(wǎng)絡(luò)觀測(cè)器 非線性系統(tǒng) Lyapunov
近幾十年,傳統(tǒng)的非線性觀測(cè)器發(fā)展迅速[1~3],例如魯棒觀測(cè)器[4,5]、高增益觀測(cè)器[6]等。然而傳統(tǒng)的非線性觀測(cè)器建立起來(lái)較復(fù)雜且對(duì)系統(tǒng)模型的精確性要求較高。筆者在一些研究人員提出的非線性系統(tǒng)多層前饋神經(jīng)網(wǎng)絡(luò)觀測(cè)器[7,8]的基礎(chǔ)上進(jìn)行改進(jìn),采用帶線性濾波器的sigmoid活化函數(shù),增強(qiáng)其抗干擾能力,并采用帶修正項(xiàng)的誤差反傳算法進(jìn)行訓(xùn)練以保證控制的精度和權(quán)值的有界。為保證狀態(tài)觀測(cè)器的穩(wěn)定性,筆者參考文獻(xiàn)[9,10]選擇了合適的權(quán)值調(diào)整方法,減少了穩(wěn)定的限制條件,使系統(tǒng)穩(wěn)定的設(shè)計(jì)參數(shù)選擇余地增大。
1 問(wèn)題描述
考慮如下MIMO非線性系統(tǒng):

(1)
式中A——系統(tǒng)矩陣,且為Hurwitz矩陣;
C——輸出矩陣,為常數(shù)矩陣;
g(x,u)——未知非線性部分;
u——輸入,u∈Rn;
x(t)——狀態(tài)向量;
y——輸出,y∈Rm。
定義1V為輸入層至隱層的權(quán)陣,W為隱層至輸出層的權(quán)陣,且‖W‖≤WM(W的最大值),‖V‖≤VM(V的最大值)。
筆者的目的是設(shè)計(jì)神經(jīng)網(wǎng)絡(luò)觀測(cè)器,使它能夠準(zhǔn)確估計(jì)系統(tǒng)狀態(tài),且觀測(cè)誤差系統(tǒng)漸進(jìn)穩(wěn)定。
2 神經(jīng)網(wǎng)絡(luò)狀態(tài)觀測(cè)器的設(shè)計(jì)
對(duì)于非線性系統(tǒng)而言,一定包含非線性部分,筆者將系統(tǒng)的非線性部分表示為g(x,u),它是一個(gè)關(guān)于狀態(tài)和控制輸入的非線性函數(shù)。下面對(duì)它采用神經(jīng)網(wǎng)絡(luò)進(jìn)行估計(jì),將g(x,u)的估計(jì)表示成權(quán)值與sigmoid函數(shù)的乘積,即:
(2)
其中^表示估計(jì)值。
選擇龍伯格形式的神經(jīng)網(wǎng)絡(luò)狀態(tài)觀測(cè)器:

(3)
其中L是狀態(tài)觀測(cè)器的增益。

(4)
對(duì)式(4)取拉氏變換,得:
(5)
由式(4)、(5)得:

(6)

3 穩(wěn)定性分析
(7)

證明 選取lyapunov函數(shù)如下:

(8)
其中,P=PT>0,滿足GTP+PGT=-Q,Q正定。



(9)


K1‖eV‖(WM+‖eW‖)}
(10)

根據(jù)式(10),得:


(11)


(12)


(13)
所以,由式(13)可得系統(tǒng)的狀態(tài)誤差e一致最終有界,且神經(jīng)網(wǎng)絡(luò)權(quán)值估計(jì)誤差eW和eV一致最終有界。
4 系統(tǒng)的收斂性分析
系統(tǒng)狀態(tài)的收斂性是保證系統(tǒng)穩(wěn)定的重要理論依據(jù),以下進(jìn)行系統(tǒng)狀態(tài)x的收斂性分析。將式(4)寫成:
(14)
其中,Ac=A-LC。
(15)
式(15)兩邊乘e-Act后再積分得:

(16)
得非齊次狀態(tài)方程的解為:
(17)
(18)

(19)
其中,Bu(τ)=Wσ(Vz)+ε(x)≤WMσM+εM,εM為建模誤差上限。
根據(jù)以上分析,系統(tǒng)狀態(tài)有界。
5 仿真實(shí)例
考慮二關(guān)節(jié)剛性機(jī)器人模型為仿真對(duì)象,根據(jù)式(1),該模型可以表示為:
(20)

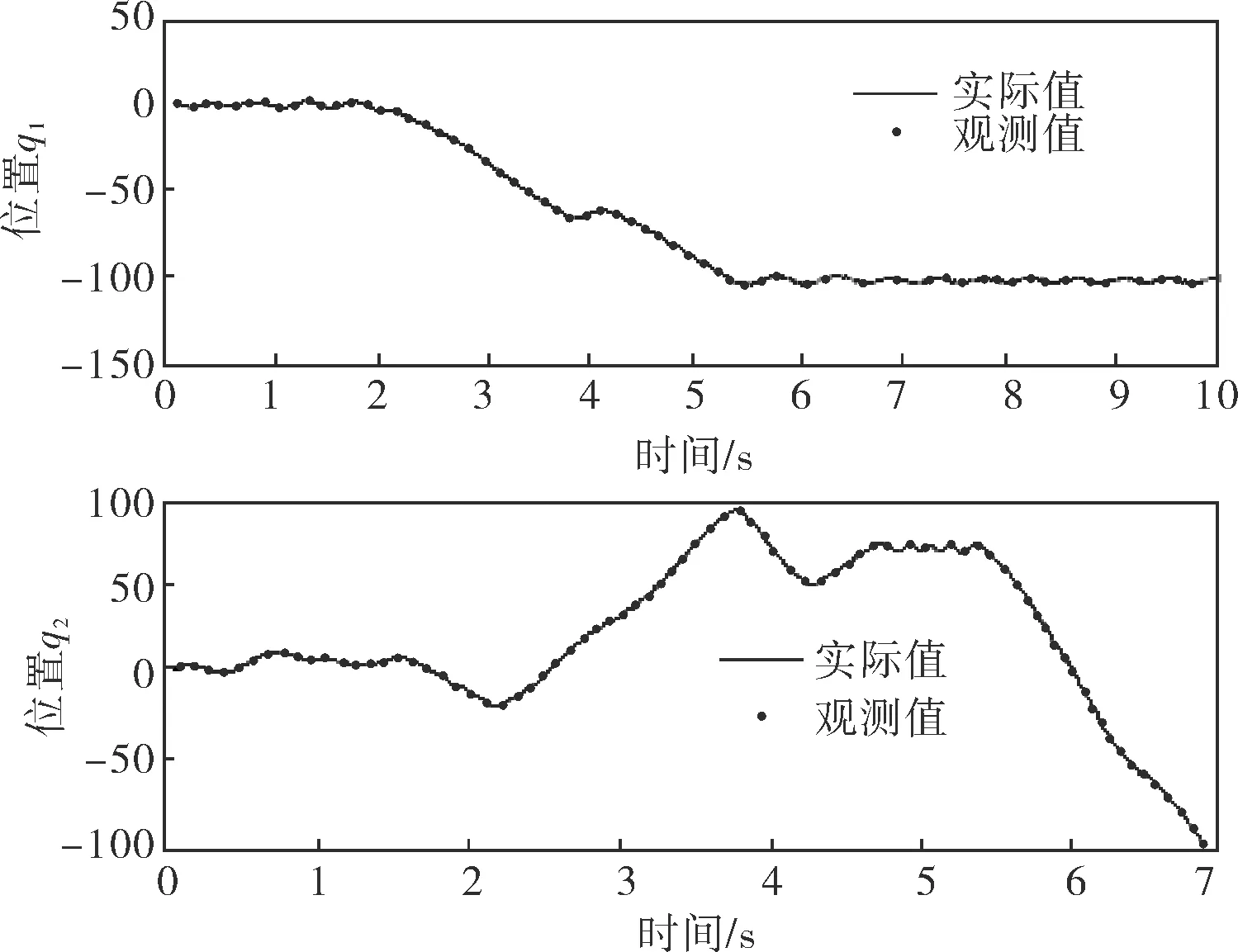
圖1 位置信號(hào)
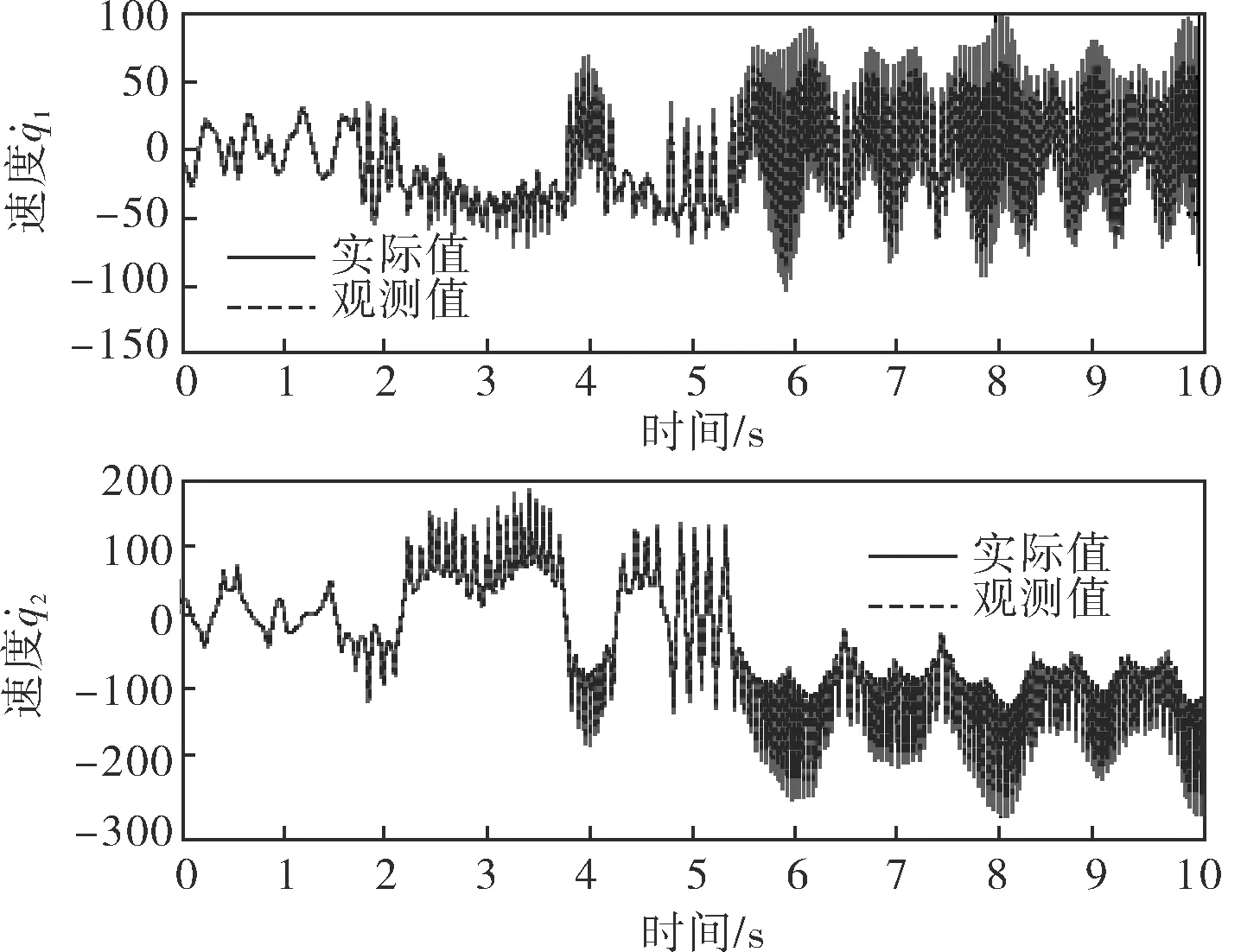
圖2 速度信號(hào)
6 結(jié)束語(yǔ)
筆者設(shè)計(jì)的神經(jīng)網(wǎng)絡(luò)觀測(cè)器采用神經(jīng)網(wǎng)絡(luò)估計(jì)系統(tǒng)的不確定部分,然后與傳統(tǒng)的龍伯格觀測(cè)器相結(jié)合,實(shí)現(xiàn)狀態(tài)估計(jì),降低了對(duì)模型精度的依賴,是對(duì)傳統(tǒng)非線性觀測(cè)器的一個(gè)改進(jìn),且設(shè)計(jì)步驟較為簡(jiǎn)單,從仿真結(jié)果可看出,式(3)的觀測(cè)器可精確地估計(jì)關(guān)節(jié)的位置和速度信號(hào)。該狀態(tài)觀測(cè)的設(shè)計(jì)對(duì)解決模型不確定系統(tǒng)狀態(tài)觀測(cè)問(wèn)題提供了一個(gè)解決辦法。
[1] 陸華才,江明,陳其工.采用非線性觀測(cè)器的PMLSM無(wú)位置傳感器控制[J].電機(jī)與控制學(xué)報(bào),2011,15(8):29~33.
[2] Li B B.A Non-Gaussian Kalman Filter with Application to the Estimation of Vehicular Speed[J].Technometrics,2009,51(2):162~172.
[3] Mahmoud M S, Memon A M,Shi P.Observer-Based Fault-Tolerant Control for a Class of Nonlinear Networked Control Systems[J]. International Journal of Control,2014,87(8):1707~1715.
[4] Karimi H R, Chadli M,Shi P.Robust Observer Design for Takagi-Sugeno Fuzzy Systems with Mixed Neutral and Discrete Delays and Unknown Inputs[J].Mathematical Problems in Engineering,2012,2012:1~13.
[5] Chen M S,Chen C C.H∞Optimal Design of Robust Observer Against Disturbances[J].International Journal of Control,2014,87(6):1208~1215.
[6] Wu Q H, Jiang L,Wen J Y. Decentralized Adaptive Control of Interconnected Non-Linear Systems Using High Gain Observer[J]. International Journal of Control,2004,77(8):21~30.
[7] Kulkarni A,Kumar A.Dynamic Recurrent Wavelet Neural Network Observer Based Tracking Control for a Class of Uncertain Nonaffine Systems[J]. International Journal of Intelligent Systems and Applications,2012,4(11):53~61.
[8] Shariati O, Mohd Z A, Khairuddin A,et al.Development and Implementation of Neural Network Observers to Estimate Synchronous Generators’ Dynamic Parameters Using On-Line Operating Data[J].Electrical Engineering,2014,96(1):45~54.
[9] Jiang Z H, Ishita T.A Neural Network Controller for Trajectory Control of Industrial Robot Manipulators[J].Journal of Computers,2008,3(8):1~8.
[10] Diryag A, Marko M,Zoran M.Neural Networks for Prediction of Robot Failures[J].Journal of Mechanical Engineering Science,2014,228(8):1444~1458.
DesignandApplicationofNewNeuralNetworkStateObserver
JIANG Yin-ling, LI Yan-hui
(SchoolofElectricalEngineeringandInformation,NortheastPetroleumUniversity,Daqing163318,China)
Considering the fact that traditional linear observer only has work satisfaction nearby operating point and the conventional nonlinear observer depends on the model precise much, a non-conventional neural network (NN) observer for the nonlinear system was proposed, which is a three-layer feed forward neural network trained extensively by error back propagation learning algorithm with a correction term to guarantee control precision and bounded NN weights. For purpose of reducing the degree of dependence on the system’s model precision, the NN was adopted to identify nonlinear parts of the system, and then a Luenberger-like observer was employed to reconstruct states of the system; the Lyapunov direct method was used to ensure stability of the non-conventional observer proposed. Applying the observer proposed to robot’s trace control shows that this method is suitable for the nonlinear system with low-precision model and it can satisfy the requirement of the control.
neural network observer, nonlinear system, Lyapunov
TH868
A
1000-3932(2016)09-0953-04
2016-07-22(修改稿)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
