基于PSO算法整定PID參數的SVG直流側電壓控制研究
2016-11-22 08:22:14王文豪
化工自動化及儀表 2016年9期
王文豪 王 軍 方 旭
(1.海南大學應用科技學院(儋州校區),海南 儋州 571737;2.河南許繼儀表有限公司,河南 許昌 461000)
基于PSO算法整定PID參數的SVG直流側電壓控制研究
王文豪1王 軍2方 旭2
(1.海南大學應用科技學院(儋州校區),海南 儋州 571737;2.河南許繼儀表有限公司,河南 許昌 461000)
闡述了PSO算法的原理,推導了SVG電壓環傳遞函數。將PSO算法納入到PID參數的尋優中,合成在線PSO-PID控制和離線PSO-PID控制。給出了離線PSO-PID、在線PSO-PID算法的適應值函數和參數設置。以推導的SVG電壓環傳遞函數為被控對象,仿真研究表明:在線PSO-PID控制能滿足被控對象為時變系統的情況,對于時變系統具有極強的適應性。
SVG 電壓穩定控制 粒子群算法 離線PSO-PID 在線PSO-PID
近些年來,電力電子器件的廣泛運用使得半導體開關器件等電氣設備日益多樣化,這些設備消耗無功功率給電網帶來額外負擔,對電能質量產生不利影響。因此,從保證電能傳輸質量和保證電力系統有效、穩定、正常運行考慮,對電網中存在的無功功率進行治理是迫切的。SVG是由逆變器為核心構成的無功補償裝置,通過控制逆變器開關器件的通斷,連續向電網注入或者吸收無功功率,不僅能夠補償無功,還可以對電網諧波進行補償。目前,SVG在對電網中無功功率進行治理、改善電能傳輸質量及保證供電系統穩定性等方面的高效性已獲得了公認,迅速發展為最主要的無功補償裝置之一,是無功補償和諧波治理方向的重點研究內容。
由于直流側電壓的穩定控制對保證SVG補償效果具有至關重要的意義,故筆者將具有全局搜索性能的PSO算法納入到PID參數的尋優中,合成離線PSO-PID控制和在線PSO-PID控制,以推導的SVG電壓環傳遞函數為被控對象,對離線PSO-PID控制和在線PSO-PID控制進行仿真驗證。
1 SVG的原理
按照直流側儲能元器件的不同選擇,SVG電路可分為電壓型橋式電路和電流型橋式電路,事實上迄今投入使用的SVG大都采用電壓型橋式電路,因此SVG往往就是指以電壓型橋式電路為逆變電路的動態補償裝置,其基本結構如圖1所示[1]。
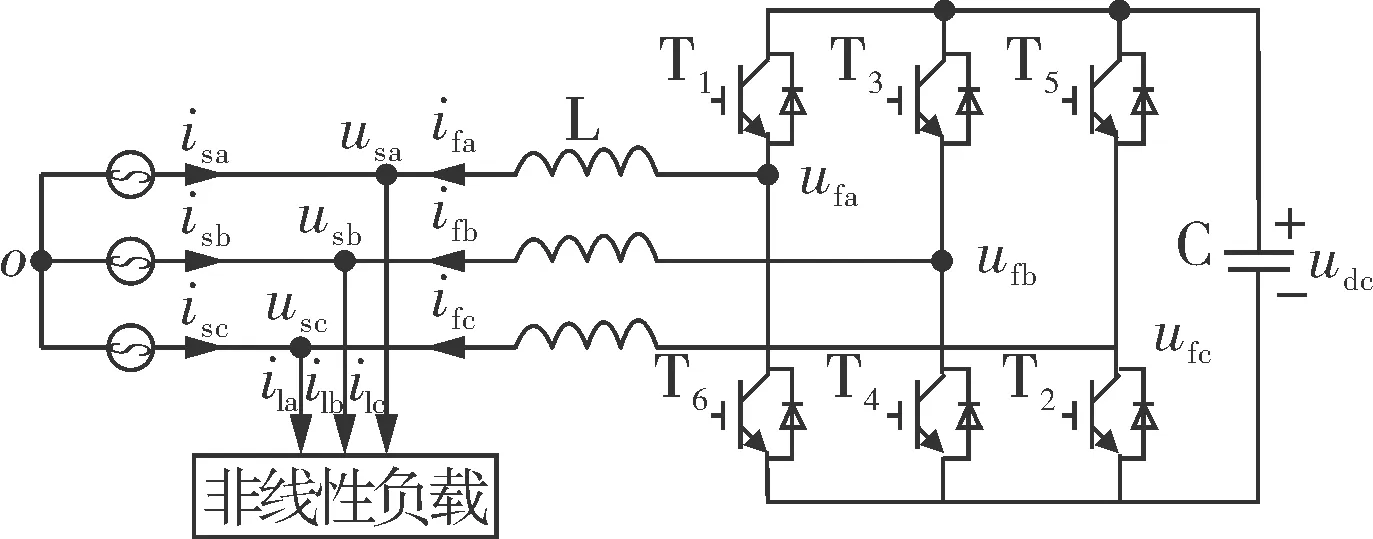
圖1 SVG的基本電路結構
圖中usa、usb、usc代表電網三相相電壓;isa、isb、isc代表電網側三相電流;ila、ilb、ilc代表負載三相電流;ifa、ifb、ifc代表SVG輸出三相電流;ufa、ufb、ufc代表PWM逆變器輸出的三相相電壓;udc代表SVG直流側電容電壓。連接電感為L,直流側電容為C。
SVG工作原理就是通過控制圖1中所示的T1~T66個半導體開關器件的通斷,使得逆變電路交流側輸出一定幅值和頻率的電壓ufa、ufb、ufc,在連接電抗作用下轉換為補償電流ifa、ifb、ifc,與電網中的無功電流相抵消,達到補償無功功率的目的。
2 PSO算法原理
假設一個群體由M個粒子組成,每個粒子處于D維搜索空間,第i個粒子的速度可以表示為矢量vi=(vi1,vi2,…,viD),位置則表示為矢量xi=(xi1,xi2,…,xiD),粒子根據適應值來對自己的位置和速度進行更新[2~4],更新的依據是兩個極值——個體極值和全局極值,個體極值是第i個粒子目前找到的最好位置,記為pbest=(pi1,pi2,…,piD),全局極值是群體中所有粒子找到的最好位置,記為gbest=(pg1,pg2,…,pgD)。對于第k次迭代,PSO中的粒子速度、位置更新規則按下式進行:
(1)

3 基于PSO算法的PID參數整定
將PSO算法用于PID參數整定,按照PSO算法整定原理和實現方式的不同,可分為離線PSO-PID和在線PSO-PID算法。圖2是PSO-PID控制系統結構框圖。
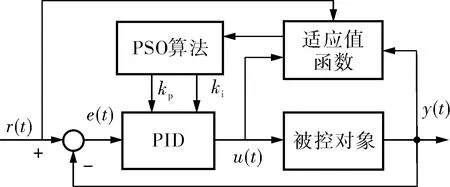
圖2 PSO-PID控制系統結構框圖
3.1離線PSO-PID算法
在離線PSO-PID算法中,PSO算法首先需要離線學習,根據適應值函數的大小在搜索空間范圍內更新粒子的位置和速度,即不斷尋找最優的PID參數,待尋優完成后,再將搜索得到的全局最佳位置代入控制系統中[1,5]。適應值函數選擇誤差絕對值時間積分作為性能指標。為防止能量過大產生超調并保證系統響應快速性,適應值函數如下:

(2)
式中e(t)——誤差;
tu——上升時間;
u(t)——PID控制器輸出;
ω——各部分性能指標所占權重。
在適應值函數中引入懲罰功能以防止產生超調,即一旦產生超調,便將超調量作為適應值函數中最主要的一項,此時的適應值函數為:

(3)
其中,ω4?ω1,保證在超調產生后,適應值函數中超調所占比重最大,即當前目標為抑制超調。為驗證離線PSO-PID算法的有效性,以下面的二階傳遞函數為例,采用GA算法對PID參數整定結果與離線PSO-PID整定結果進行比較:
(4)
仿真參數設置。GA算法交叉概率和變異概率分別為0.900和0.033,式(2)、(3)中ω1~ω4分別取0.999、0.001、100.000、2.000[6]。PSO算法初始慣性權重為0.950,終止慣性權重為0.400,加速因子c1=c2=2。GA算法和PSO算法比例增益參數取值范圍是[0,20],積分增益參數和微分增益參數均為[0,1],粒子個數為30,采用實數編碼,經過100代迭代。圖3是被控對象采用兩種算法尋優得到的最佳PID參數下的階躍響應。
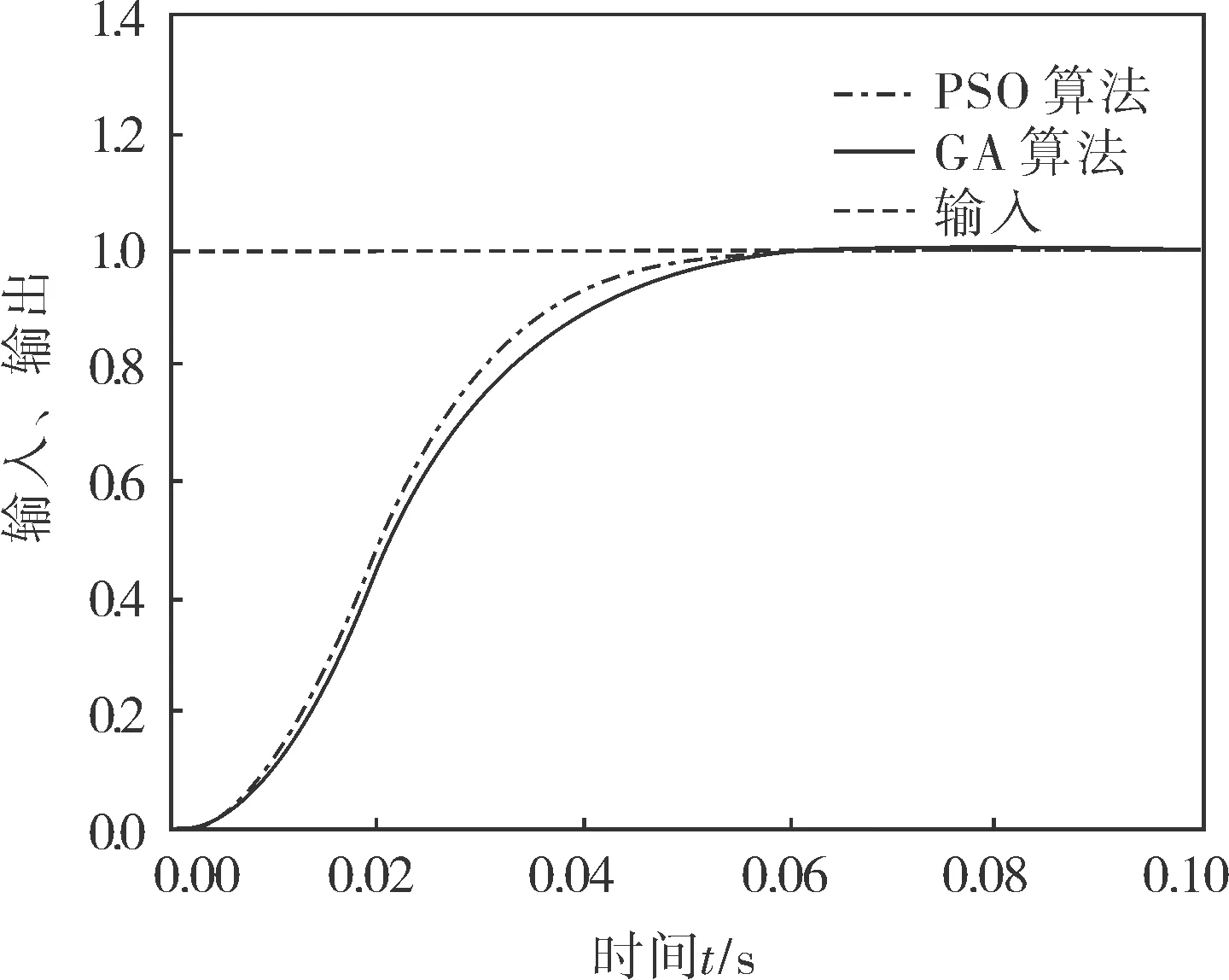
圖3 離線GA和離線PSO迭代下的系統階躍響應
3.2在線PSO-PID算法
在線PSO-PID算法[1,7]就是在每個采樣時間內對PID參數進行整定,比如說在某個采樣時間,選取足夠多的粒子,計算得到每個個體的適應值,根據適應值的大小決定粒子位置和速度更新的大小和方向,經過一定次數的迭代,得到該采樣時間內的最佳PID參數,進入下一個采樣時間再用同樣的方法搜索該采樣時間內的最佳PID參數。
首先構造粒子適應值函數,取第i個粒子的適應值函數為誤差的絕對值和誤差變化率的絕對值之和:
J(i)=α×|er(i)|+β×|de(i)|
(5)
式中de(i)——第i個粒子的誤差變化率;
er(i)——第i個粒子的誤差;
α、β——權值。
引入懲罰功能,防止產生超調:
ifer(i)<0J(i)=J(i)+100|er(i)|
(6)
仍然選取式(4)為被控對象,輸入為階躍信號,采樣時間為1ms,采用PSO算法對PD參數進行在線尋優,與采用GA算法進行比較。比例增益參數取值范圍是[9.0,12.0],微分增益參數取值范圍是[0.2,0.3],GA算法交叉概率Pc=0.90,變異概率Pm=0.20-[1∶1∶S]×0.01/S,PSO算法初始慣性權重為0.95,終止慣性權重為0.40,加速因子c1=c2=2。兩種算法群體大小為120,進化代數為10代,采用式(5)、(6)為適應值函數,取α=0.95,β=0.05,。圖4為在線PSO-PD算法和在線GA-PD算法的階躍響應曲線。
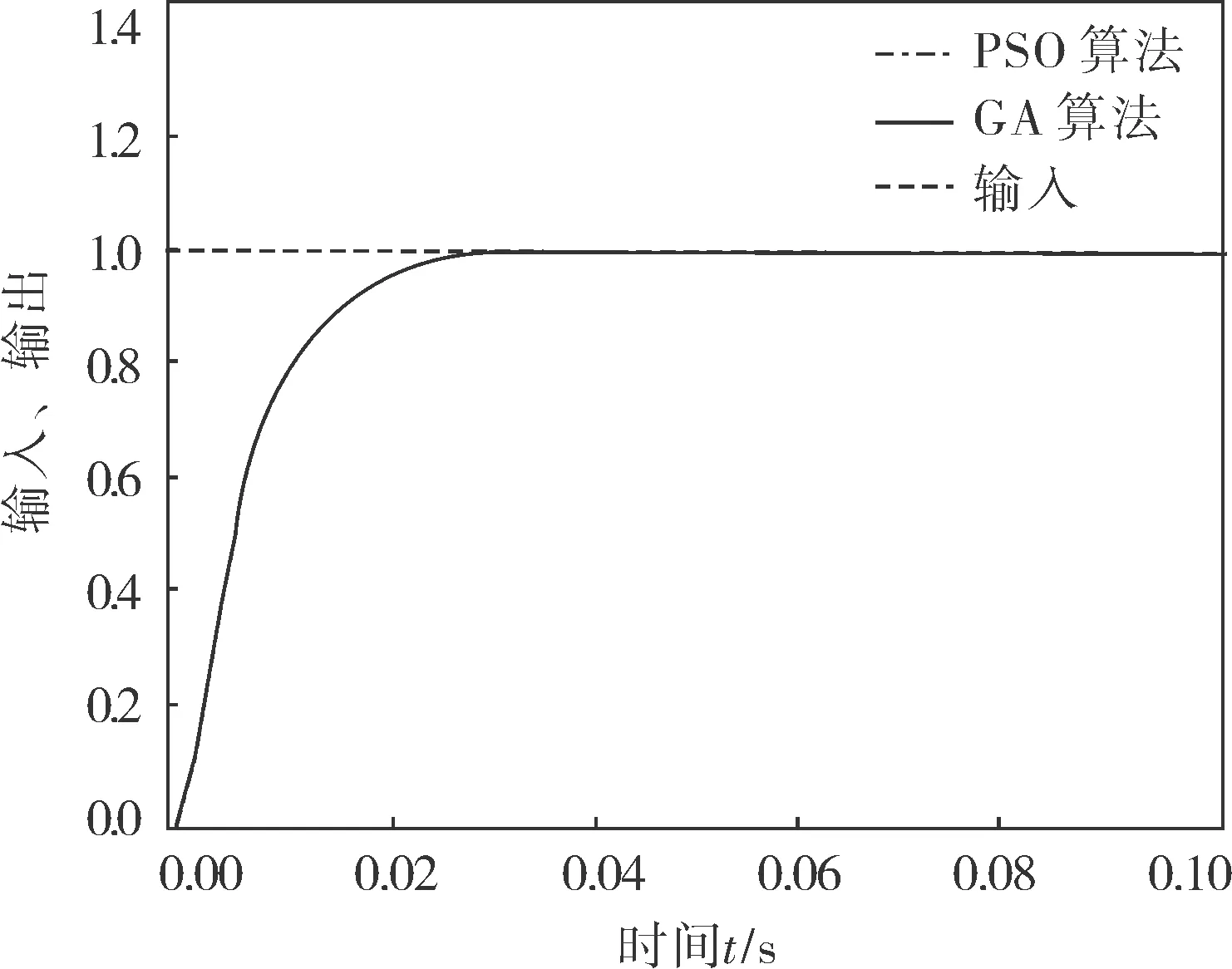
圖4 在線PSO算法和在線GA算法的系統階躍響應曲線
針對離線PID整定和在線PID整定兩種情況,綜合比較GA算法和PSO算法在PID參數整定中的應用,可以得到如下結論:
a. 與離線GA-PID相比,離線PSO-PID具有更快的收斂速度和更高的尋優精度。
b. 在線GA-PID和在線PSO-PID整定下,系統階躍響應幾乎一致。由于PSO算法沒有GA算法中的選擇、交叉及變異等算子,僅需根據適應值更新位置和速度信息,算法更簡單,整定速度更快。
c. 比較圖3、4,在線整定下的階躍響應優于離線整定。
4 SVG直流側電壓控制研究
在實際使用中,考慮到SVG變流電路吸收的電流除基波電流外,還包括諧波電流,諧波電流會造成部分能量在SVG和電源之間往返,因此直流側儲能元件的存在才能保證變流電路的穩定工作[8],實際中也有的SVG兼具補償電網中無功功率和低次諧波的作用。
4.1電壓環傳遞函數推導
直流側電壓控制目前用得較多的是在電流跟蹤控制內環的基礎上添加一個電壓外環[9]。依據圖1,假設電網為三相平衡,令三相電網基波電動勢為:
(7)
式中Em——基波電勢最大值。
由于到開關頻率較高,遠遠高于電網頻率,故只考慮開關函數sk(k=a,b,c)的低頻分量,忽略PWM諧波分量,則:
(8)
式中m——PWM調制比,m≤1;
θ——開關函數基波初始相位角。
三相網側電流為:
(9)
式中Im——網側電流最大值。
另外三相直流側電流可由開關函數描述為:
idc=saisa+sbisb+scisc
(10)
將式(8)、(9)代入式(10),化簡可得逆變電路直流側電流與網側電流模型為:
idc≈0.75mImcosθ
(11)
根據式(11),SVG電壓環結構如圖5所示。不考慮負載電流的擾動,電壓環傳遞函數可表示為:
(12)
其中,1/(1+τvs)為直流側電壓采樣存在的小慣性延時,Wci(s)≈1/(1+Tcis)為電流內環等效函數,0.75mcosθ是直流側電流與網側電流的關系,等效一時變環節,被控對象是一個時變系統,在大多數文獻中,0.75mcosθ取為0.75(m≤1),被控對象簡化為定常系統:
(13)

圖5 SVG電壓環結構
為充分比較上述控制方法在時變系統中的性能,在式(13)中加入時變環節K=1+0.1sin2πt:
(14)
4.2基于PSO的直流側電壓控制
對于式(14)時變系統,(τv+Tci)取0.08s,直流側電容C取0.002 2F,分別用離線PSO和在線PSO算法對PI參數進行優化。PSO算法初始慣性權重為0.95,終止慣性權重為0.40,加速因子c1=c2=2,算法群體大小為120,進化代數10代,速度范圍為[-1,1],kp范圍為[0,10],ki范圍為[0,1],采用式(5)、(6)作為適應值函數,取α=0.95,β=0.05。
圖6為3種控制對時變系統的單位階躍響應。較傳統PI控制,離線PSO控制超調有所減小,上升時間較快,但由于其本質仍為PI控制,因此系統輸出振蕩、穩態誤差問題雖有所緩解,但仍未得到解決。而在線PSO-PI控制的單位階躍響應具有更快的響應時間,幾乎無超調,輸出無振蕩,穩態誤差幾乎為零,對于時變系統具有極強的適應性。
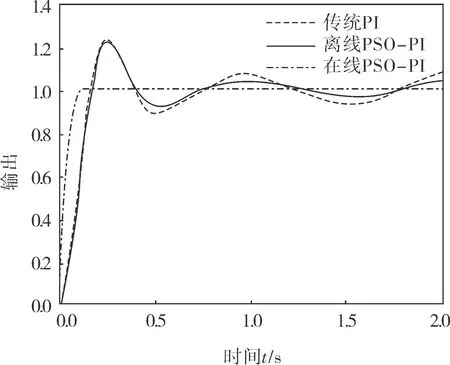
圖6 3種控制在時變系統的單位階躍響應
5 結束語
隨著電力電子器件的發展,電網中負載形式日趨多樣化,導致電網面臨著嚴峻的低功率因數問題。就無功補償領域而言,SVG以其快速的響應速度、平滑的無功調節、可靠的運行特性及高精度的無功補償等優勢成為無功補償領域最新的研究熱點,代表了無功補償裝置的發展方向。針對直流側電壓的穩定控制對保證SVG補償效果具有至關重要的意義,將具有全局搜索性能的PSO算法納入到PID參數的尋優中,以SVG電壓環為被控對象,合成在線PSO-PID控制和離線PSO-PID控制,仿真結果表明在線PSO-PID控制能滿足被控對象為時變系統的情況,對于時變系統具有極強的適應性。
[1] 張鵬.基于DSP的低壓靜止無功發生器的研究[D].合肥:合肥工業大學,2015.
[2] Khandani K,Jalali A A,Alipoor M.Particle Swarm Optimization Based Design of Disturbance Rejection PID Controller for Time Delay Systems[C]. IEEE International Conference on Intelligent Computing and Intelligent Systems.Shanghai:IEEE,2009:862~866.
[3] Adel T,Abdelkader C. A Particle Swarm Optimization Approach for Optimum Design of PID Controller for Nonlinear Systems[C]. International Conference on Electrical Engineering and Software Applications.Hammamet:IEEE,2013: 1~4.
[4] Jalilvand A,Kimiyaghalam A,Ashouri A,et al.Advanced Particle Swarm Optimization-Based PID Controller Parameters Tuning[C]. IEEE International Multitopic Conference.Karachi:IEEE,2008: 429~435.
[5] 張朝龍,江巨浪,江善和,等.一種基于改進PSO算法的PID控制器參數整定方法[J].化工自動化及儀表,2010,37(12): 15~18.
[6] 劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業出版社,2000.
[7] 田艷兵.基于PSO的自整定PID溫度控制研究[J].化工自動化及儀表,2010,37(11):31~33.
[8] 趙國鵬,劉進軍.靜止無功發生器直流側電壓對無功補償特性的影響研究[J].西安交通大學學報,2010,44(4):66~70.
[9] 張曉濱,鐘彥儒.靜止無功發生器動態模型和非線性逆系統-PI控制策略研究[J].系統仿真學報,2009,21(11):3166~3170.
ResearchonSVGDC-sideVoltageControlBasedonPSOAlgorithminTuningPIDParameters
WANG Wen-hao1,WANG Jun2, FANG Xu2
(1.CollegeofAppliedScienceandTechnology,HainanUniversity,Danzhou571737,China;2.HenanXujiMeteringLimitedCompany,Xuchang461000,China)
The principle of PSO algorithm was described and SVG voltage loop transfer function was derived. Applying PSO algorithm to optimize PID parameters and to implement online PSO-PID control and offline PSO-PID control was implemented, including presentation of the fitness function and the parameter setting of the offline PSO-PID and online PSO-PID algorithm. Taking SVG voltage loop transfer function as the controlled object, the simulation results show that,the PSO-PID control can satisfy time-varying system of the controlled object along with a strong adaptability.
static var generator (SVG),voltage stability control, PSO, offline PSO-PID, online PSO-PID
TH862
A
1000-3932(2016)09-0932-05
2016-07-23(修改稿)
