三相四開關容錯逆變器的PMSM驅動系統FCS-MPC策略
2016-11-21 01:02:16滕青芳李國飛朱建國郭有光
電機與控制學報 2016年10期
關鍵詞:系統
滕青芳, 李國飛, 朱建國, 郭有光
(1.蘭州交通大學 自動化與電氣工程學院, 甘肅 蘭州 730070;2.悉尼科技大學 工程與信息技術學院,澳大利亞 悉尼 2007)
?
三相四開關容錯逆變器的PMSM驅動系統FCS-MPC策略
滕青芳1, 李國飛1, 朱建國2, 郭有光2
(1.蘭州交通大學 自動化與電氣工程學院, 甘肅 蘭州 730070;2.悉尼科技大學 工程與信息技術學院,澳大利亞 悉尼 2007)
針對三相四開關容錯逆變器的永磁同步電機(PMSM)驅動系統,基于模型參考自適應(MRAS)觀測器,提出一種有限控制集模型預測控制(FCS-MPC)策略。考慮溫度變化對永磁磁鏈影響,采用MRAS技術,實現了對永磁磁鏈的在線辨識;同時考慮降低逆變器開關頻率的需求,設計開關頻率可優化的FCS-MPC系統目標函數。與常規FCS-MPC方法比較,本方法可以有效減小系統控制過程的計算量,與此同時,本方法中的電流反饋特性可對四開關逆變器直流母線電容分壓不平衡形成的不利影響實現自動抑制。仿真結果表明,本方法能夠保證四開關容錯逆變器驅動的PMSM系統持續穩定運行、具有良好運行性能,并能明顯降低逆變器功率管的開關頻率。
三相四開關容錯逆變器;有限控制集模型預測控制;永磁同步電機;開關頻率;永磁磁鏈辨識
0 引 言
作為常用驅動部件的三相六開關電壓源逆變器(voltage source inverter, VSI)是電機控制系統潛在故障之一。如果VSI功率開關元件短路或斷路,造成電機某相繞組開路,電機缺相運行會使輸出轉矩出現較大的波動,產生較大的機械噪音,系統的整體性能大大降低。因此,必須考慮針對VSI故障的電機驅動系統容錯控制問題。

永磁同步電機(permanent magnet synchronous motor, PMSM)具有轉矩慣量比高、高功率因數等優點,因而在工業、交通、軍事、航空等重要領域得到了廣泛應用。對于PMSM驅動系統而言,目前成熟的控制方法有磁場定向控制(field oriental control, FOC)和直接轉矩控制(direct torque control, DTC)。基于定子電流控制方式的FOC,其固有電流內環的存在影響了驅動系統響應性能;基于開關表控制方式的DTC存在轉矩和磁鏈脈動大等缺點。近些年,在電機領域又出現了一種引起廣泛重視的控制方式—有限控制集模型預測控制(finite control set model predictive control, FCS-MPC)[12-16]。FCS-MPC具有較強的約束處理能力[17-20]。與FOC和DTC技術相比,FCS-MPC能顯著減少轉矩和定子電流中的諧波,改善系統動態性能。
FCS-MPC方法雖然可以獲得良好控制效果,但需要計算出每個采樣周期內VSI全部開關組合狀態下系統的預測值,從而增加了系統控制過程的計算成本,而龐大的計算量是MPC進入工業應用領域的主要瓶頸[21]。為了克服常規FCS-MPC上述缺點,文獻[22]提出了改進型FCS-MPC,該方法無需計算每個采樣周期內VSI所有開關組合狀態下的預測電流值,因而減小了控制過程的計算量。
對于三相四開關VSI而言,直流母線電容分壓會出現不均衡現象,這將使電機驅動系統控制性能降低[23]。文獻[24]采用模型預測轉矩控制(model predictive torque control, MPTC)策略研究了基于三相四開關VSI的異步電機控制系統,并通過將不平衡電壓引入目標函數實現了對電容分壓不均衡影響的抑制,但該方法需要調整目標函數中兩個相互影響的權重因子。而改進型FCS-MPC具有電流反饋閉環控制特性,它可以自動修正定子參考電壓,以補償直流母線電容分壓不平衡對電機造成的不利影響[2]。
考慮四開關VSI的可靠性問題(即減小功率管開關頻率),同時考慮到溫度變化對永磁磁鏈的影響,本文基于模型參考自適應(model reference adaptive system, MRAS)永磁磁鏈觀測器,針對PMSM驅動系統的三相四開關容錯VSI,提出了開關頻率可優化的FCS-MPC控制方法。
1 四開關容錯逆變器PMSM拓撲及數學模型
1.1 四開關容錯逆變器PMSM拓撲
容錯逆變器供電的PMSM系統結構如圖1所示,母線間兩串聯電容的中點通過三個雙向晶閘管TRn(n=a,b,c)分別連接到繞組輸入端。要實現逆變器的容錯控制,根據對應的故障開關位置,斷開熔斷絲Fi(i=1,2,3),隔離故障橋臂,觸發相應的雙向晶閘管導通,故障橋臂將由串聯電容取代。不失一般性,以a相橋臂故障為例,此時四開關容錯逆變器PMSM的等效結構如圖2所示。
四開關逆變器具有4個開關狀態,可以形成4個電壓矢量。如圖3所示,四個電壓矢量的幅值并非完全相等,電壓矢量的分布在空間呈非對稱特性,從而使得控制難度加大。

圖1 容錯逆變器拓撲Fig.1 Fault-tolerant inverter topology

圖2 容錯逆變器PMSM的等效結構圖Fig.2 Equivalent structure of fault-tolerant inverter and PMSM drive

圖3 四開關逆變器的電壓矢量分布Fig.3 Voltage vector distribution of four-switch inverter
1.2 四開關容錯逆變器PMSM數學模型
對于三相四開關逆變器,實際系統中存在著電容電壓的不平衡現象,母線電容C1、C2兩端電壓將隨流過的電機a相電流ia產生波動[25]。
假設不平衡電壓為Δu,且C1=C2=C,此時電容C1、C2端電壓為
(1)
式中:Δu=(1/C)∫(-ia/2)dt。
此時,三相定子繞組的各相電壓為
(2)
式中:Si(i=b,c)為第i相橋臂對應的開關函數。橋臂上管導通下管關斷時Si=1,橋臂上管關斷下管導通時Si=0。(Sb,Sc)具有(0,0)、(0,1)、(1,0)、(1,1)四種開關狀態。
abc三相靜止坐標系轉換到αβ二相靜止坐標系的變換矩陣為

αβ兩相靜止坐標系下的PMSM繞組定子電流方程可表示為
(3)
式中:iα、iβ和uα、uβ分別為定子電流、電壓的αβ軸分量;ψf為永磁體磁鏈;Rs為定子電阻;L為繞組電感;ω為轉速;θ為轉子位置角。
由式(1)、式(2)和式(3)可知,電容不平衡電壓Δu會對定子電流產生不利影響,從而使得電機轉矩和轉速出現較大紋波,降低了驅動系統控制性能。采用具有電流反饋特性的FCS-MPC策略能夠自動抑制這種電容電壓不平衡的影響。
2 四開關容錯逆變器PMSM的FCS-MPC系統
針對四開關逆變器PMSM驅動系統,基于模型參考自適應(MRAS)的永磁磁鏈觀測器,提出了開關頻率可優化的FCS-MPC策略,其系統框圖如圖4所示。圖4系統主要包括:MRAS永磁磁鏈觀測器、FCS-MPC、四開關容錯逆變器、PI控制器等。
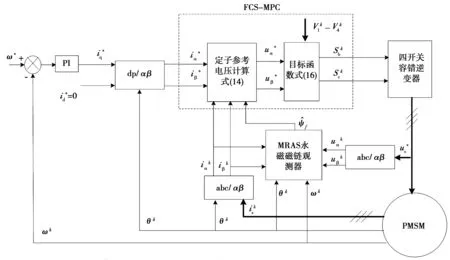
圖4 基于MRAS觀測器的四開關容錯逆變器PMSM的FCS-MPC系統框圖Fig.4 Block diagram of FCS-MPC for PMSM system driven by four-switch fault-tolerant inverter based on MRAS observer
2.1 基于MRAS的永磁磁鏈在線辨識
溫度變化會改變電機定子電阻和永磁體磁鏈。相比于定子電阻變化的影響,溫度變化引起的永磁體失磁對電機驅動系統的影響占主導地位[26],而永磁體磁鏈的不準確或變化對控制精度的影響是顯著的,因此本文在對PMSM實施FCS-MPC時,將采用模型參考自適應(MRAS)技術對永磁體磁鏈進行在線辨識。
αβ兩相靜止坐標系下的定子電流觀測器構造為
(4)

定義αβ兩相靜止坐標系下定子電流和永磁磁鏈估計誤差為
(5)
式(3)減式(4)得動態誤差方程:
(6)
設計Lyapunov函數如下:

(7)
由式(6)、式(7)可得

(8)


(9)
由于永磁磁鏈實際值變化相對定子電流觀測器(4)時間尺度而言是緩慢的,因此可得

(10)
進而可以得到永磁磁鏈的自適應律:

(11)
式(11)能夠保證模型參考自適應觀測器(4)的穩定性。
為了改善永磁磁鏈辨識的精度和收斂速度,采用PI結構設計自適應率:

(12)
式中:kp1,ki1分別是比例和積分增益。
2.2 四開關容錯逆變器PMSM系統FCS-MPC控制
對式(4)進行離散,可得αβ坐標系下定子電流在下一采樣時刻的預測值表達式為
(13)

(14)

目標函數通常根據控制目標來定義,文獻[22]所采用的目標函數定義為


(15)
通過式(15)判斷出最接近定子參考電壓的電壓矢量,并將其所對應的開關狀態作用于逆變器。根據式(15)所建立的目標函數雖然可以保證系統的運行性能,但并未考慮減少逆變器功率管開關頻率的問題。
與常規六開關逆變器相比,四開關逆變器產生的電壓矢量個數減少,因此每個功率管在相同的時間內所承受的開關次數必然會增加,因此增加了開關損耗,這將會影響驅動系統的可靠性。為降低四開關逆變器功率管在每個采樣周期內的開關次數,采用如下目標函數為


(16)
式(16)權重因子k的取值設計如下:
(17)

式(17)表明,權重因子k通過電流偏差進行選取。若電流偏差在誤差允許范圍之外,此時的首要任務是將電流偏差快速收斂到電流偏差界限值之內,以免過大的電流偏差影響系統的轉速和轉矩響應;而當電流偏差在界限值之內時,則取k=a,在保證系統良好運行性能的同時減小開關頻率。
通過上述設計過程可以看出,本文FCS-MPC策略具有以下兩個特點:
1)由式(14)可知,所采用的FCS-MPC方法實質為電流反饋閉環控制,它可以通過對定子參考電壓的自動修正,來補償式(1)直流母線電容C1、C2端電壓uc1,uc2不平衡給電機電流帶來的影響[2]。
2)與常規FCS-MPC方法相比,本FCS-MPC方法不需要計算每個采樣周期內逆變器所有開關組合狀態下的預測電流值,而關鍵在于計算每個采樣周期內αβ軸定子參考電壓矢量,因此能夠明顯降低計算量[22]。
2.3 PI控制器
PI控制器用于調節電機轉速,其輸出為電機dq二相旋轉坐標系下q軸參考電流。適當選擇PI控制器參數,可減小電機轉速波動和轉矩波動。
2.4 四開關容錯逆變器
采用圖2所示的拓撲結構。
3 仿真研究
為驗證基于四開關容錯逆變器的PMSM驅動系統FCS-MPC方法的有效性和正確性,利用Matlab/SIMULINK搭建了圖4的仿真模型。電機參數如表1所示[27]。
系統采樣周期設置為10 μs,圖4中控制系統PI參數設置為kp=3,ki=4。
式(12)中MRAS永磁磁鏈觀測器的PI參數設置為kp1=0.001,ki1=0.2。給定轉速ω*設置為1 000 r/min,PMSM帶載(1 N·m)啟動,在0.2 s時加載 2 N·m。在0.4 s時將永磁磁鏈值由0.19 Wb突變為0.175 Wb。

表1 PMSM參數
圖5為不考慮開關頻率時的定子電流偏差Δi=||i*|-|i||。由圖5可看出,當定子電流達到穩態時,定子電流偏差Δi約為0.5 A,因此在考慮一定裕度基礎上,將|Δiband|取值為0.7 A。

圖5 定子電流偏差Fig.5 Stator current error

a轉矩脈動/(N·m)開關頻率/kHz00.12529.331000.13222.302000.15315.47
表2給出了在不同a取值下系統的轉矩脈動及開關頻率。由表2可得,當a取值為100時,在明顯降低開關頻率的同時系統還可以保證較小的轉矩脈動,因此本文選取a值為100。表2中的逆變器平均開關頻率計算采用以下公式:

s.t.i∈(b,c)。
(18)
式中N為采樣周期的個數。
圖6~圖8分別為系統的轉速、電磁轉矩以及三相定子電流動態響應。這些結果反映出:轉速和轉矩都具有好的動態響應特性,與此同時,三相定子電流也具有良好的平衡性。仿真結果表明,FCS-MPC方法中的電流反饋控制特性能夠有效地減少由于直流母線電容分壓不平衡造成的轉速和轉矩紋波。

圖6 轉速響應Fig.6 Speed response

圖7 電磁轉矩響應Fig.7 Electromagnetic torque response

圖8 三相定子電流響應Fig.8 Three phase stator current responses
圖9為MRAS觀測器對永磁磁鏈辨識的仿真曲線。由圖9可看出,一方面,突加負載對永磁磁鏈的辨識并未產生明顯影響,另一方面,對于實際永磁磁鏈的突變,MRAS觀測器可以快速實現跟蹤。因此本文所設計的MRAS觀測器具有良好的辨識精確度。

圖9 永磁磁鏈辨識曲線Fig.9 Identification curve of permanent magnet flux linkage
4 結 論
本文對三相四開關容錯逆變器PMSM進行了數學建模分析,提出了基于三相四開關逆變器的PMSM驅動系統FCS-MPC策略。在設計FCS-MPC系統目標函數時,考慮了降低逆變器開關頻率的需求,同時基于MRAS方法對FCS-MPC系統所需的永磁磁鏈值進行了在線辨識。仿真結果表明基于四開關容錯逆變器的FCS-MPC策略可以使PMSM系統穩定運行,具有良好響應特性和較強魯棒性,并能明顯降低逆變器功率管的開關頻率,提高系統可靠性。本文FCS-MPC方法中的電流反饋特性可以通過對定子參考電壓的自動修正,來補償直流母線電容端電壓不平衡給電機電流帶來的影響。
[1] Behrooz M. Survey of fault-tolerance techniques for three-phase voltage source inverters[J].IEEE Transactions on Industrial Electronics, 2014, 61(10):5192-5202.
[2] 安群濤. 三相電機驅動系統中逆變器障診斷與容錯控制策略研究[D]. 哈爾濱工業大學, 2011.
[3] GAETA A,SCELBA G,CONSOLI A.Modeling and control of three-phase PMSMs under open-phase fault[J].IEEE Transactions on Industry Applications, 2013, 49(1): 74-83.
[4] HOANG K D, ZHU Z Q, FOSTER M. Direct torque control of permanent magnet brushless AC drive with single-phase open-circuit fault accounting for influence of inverter voltage drop[J]. IET Electric Power Applications, 2013, 7(5): 369-380.
[5] 趙克, 安群濤, 孫力, 等. 容錯逆變器 PMSM 無位置傳感器控制系統[J]. 電機與控制學報, 2010, 14(4): 25-30.
ZHAO Ke, AN Quntao, SUN Li,et al.Fault-tolerant inverter permanent synchronous motor position sensorless control system[J]. Electric Machine and Control, 2010, 14(4): 25-30.
[6] Campos-Delgado D U, Espinoza-Trejo D R, Palacios E. Fault-tolerant control in variable speed drives:a survey[J].IET Electric Power Applications, 2008, 2(2): 121-134.
[7] MENDES A M S,CARDOSO A J M. Fault-tolerant operating strategies applied to three-phase induction-motor drives[J].,IEEE Transactions on Industrial Electronics,2006,53(6):1807-1817.
[8] 張蘭紅,胡育文,黃文新.容錯型四開關三相變換器異步發電系統的直接轉矩控制研究[J].中國電機工程學報.2005, 25(18):140-145.
ZHANG Lanhong, HU Yuwen, Huang Wenxin. Research on direct torque control of tolerant type four-switch three-phase converter induction generation system[J].Proceeding of the CSEE, 2005, 25(18):140-145.
[9] 孫丹,賀益康,何宗元.基于容錯逆變器的永磁同步電機直接轉矩控制[J].浙江大學學報.2007, 41 (7):1101-1106.
SUN Dan, HE Yikang, He Zongyuan. Fault tolerant inverter based direct torque control for permanent magnet synchronous motor[J].Journal of Zhejiang University, 2007,41(7):1101-1106.
[10] WELCHKO B A, LOPO T A,JAHNS T M, et al.Fault tolerant three-phase AC motor drive topologies: a comparison of features, cost, and limitations[J]. Power Electronics, IEEE Transactions on, 2004, 19(4): 1108-1116.
[11] LIU Tianhua, Fu Jenren, Lipo T A. A strategy for improving reliability of field-oriented controlled induction motor drives[J]. IEEE Transactions on Industry Applications, 1993, 29(5): 910-918.
[12] MATTHISAS P, SILVERIO B. Model predictive direct torque control with finite control set for PMSM drive systems, Part1: maximum torque per ampere operation[J].IEEE Transactions on Industrial Information. 2013, 9(4):1912-1921.
[13] MATTHIAS P,SILVERIO B. Model predictive direct torque control with finite control set for PMSM drive systems, Part2: field weakening operation[J].IEEE Transactions on Industrial Information. 2013, 9(2):648-657.
[14] WANG Fengxiang, ZHANG Zhenbin, Davari A, et al. An experimental assessment of finite-state Predictive Torque Control for electrical drives by considering different online-optimization methods[J]. Control Engineering Practice, 2014, 31: 1-8.
[15] XIA Changliang, WANG Yingfa, SHI Tingna. Implementation of finite-state model predictive control for commutation torque ripple minimization of permanent-magnet brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2013, 60(3): 896-905.
[16] TOBIAS G,DANIEL E Q.Performance of multistep finite control set model predictive control for power electronics[J]. IEEE Transactions on Power Electronics, 2015, 30(3): 1633-1644.
[17] MAYNE D Q. Model predictive control: Recent developments and future promise[J]. Automatica, 2014, 50:2967-2986.
[18] TENG Qingfang, BAI Jianyong, ZHU Jianguo. Fault tolerant model predictive control of three-phase permanent magnet synchronous motors[J].WSEAS Transaction on systems. 2013, 8(12):385-397.
[19] 李寧, 李穎暉, 韓建定, 等. 基于混合邏輯動態模型的三相逆變電路有限控制集模型預測控制策略[J]. 電網技術, 2014, 38(2): 375-380.
LI Ning, LI Yinghui, HAN Jianding,et al. FCS-MPC Strategy for Inverters Based on MLD Model[J]. Power System Technology, 2014, 38(2): 375-380.
[20] KWAK S. Predictive control method with future zero-sequence voltage to reduce switching losses in three-phase voltage source inverters[J].IEEE Transactions on Power Electronics. 2015, 30(3):1558-1566.
[21] 席裕庚, 李德偉, 林姝. 模型預測控制——現狀與挑戰[J].自動化學報, 2013, 39(3): 222-236.
XI Yugeng, LI Dewei, LIN Shu. Model predictive control—status and challenges[J]. Acta Automatica Sinica, 2013, 39(3): 222-236.
[22] XIA Changliang, LIU Tao, Shi Tingna, et al. A Simplified Finite Control Set Model Predictive Control for Power Converters[J].IEEE Transaction on industrial informatics, 2014, 10(2):991-1002.
[23] 蔣志堅, 徐殿國, 朱香娟. 感應電動機四開關低成本逆變器的磁鏈軌跡改進控制研究[J]. 中國電機工程學報, 2004, 23(11): 74-79.
JIANG Zhijian, XU Dianguo, ZHU Xiangjuan. An improved develop-ment of four-switch low cost inverter on induction ,motor with magnetic-flux control method[J].Proceedings of CSEE, 2003, 23(11): 74-79.
[24] ZHOU Dehong, ZHAO Jin, LIU Yang. Predictive Torque Control Scheme For Three-Phase Four-Switch Inverter-Fed Induction Motor Drives With DC-link Voltages Offset Suppression[J].IEEE Transaction on Power Electronics, 2014.
[25] KIM J, HONG J, NAM K. A current distortion compensation scheme for four-switch inverters[J]. IEEE Transactions on Power Electronics,2009, 24(4): 1032-1040.
[26] KRISHNAN R.Selection criteria for servo motor drives[J].IEEE Transactions on Industry Applications, 1987 (2): 270-275.
[27] 王慶龍, 張興, 張崇巍. 永磁同步電機矢量控制雙滑模模型參考自適應系統轉速辨識[J]. 中國電機工程學報, 2014, 34(6): 897-902.
WANG Qinglong, ZHANG Xing, ZHANG Chongwei.Double Sliding-mode Model Reference Adaptive System Speed Identification for Vector Control of Permanent Magnet Synchronous Motors[J]. Proceedings of CSEE, 2014, 34(6):897-902.
(編輯:劉素菊)
Finite-control-set model predictive control for PMSM systems driven by three-phase four-switch fault-tolerant inverter
TENG Qing-fang1, LI Guo-fei1, ZHU Jian-guo2, GUO You-guang2
(1.Department of Automation and Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China;2.Faculty of Engineering and Information Technology, University of Technology, Sydney 2007, Australia)
Based on three-phase four-switch inverter, a finite-control-set model predictive control (FCS-MPC) strategy is proposed for permanent magnet synchronous motor (PMSM) drive system with MRAS observer. Because of the reason that permanent magnet flux linkage is varied with temperature change, a MRAS observer was designed to identify permanent magnet flux online. In order to improve the inverter reliability, its switch frequency optimization was taken into account in designing cost function of FCS-MPC. Compared with conventional FCS-MPC, the proposed one in this paper obviously reduces the computation amount of control system. Meanwhile the current feedback characteristic provided by this method can automatically suppress the adverse effect resulting from two capacitor voltages’ unbalance of DC bus terminal in three-phase four-switch inverter. Numerical simulation results illustrate that the proposed FCS-MPC can enable whole system to not only run continuously and stably but also achieve satisfactory torque and speed control as well as reduce the average inverter switching frequency.
three-phase four-switch fault-tolerant inverter; finite-control-set model predictive control; PMSM; switch frequency; permanent magnet flux identification
2015-01-05
國家自然科學基金(61463025)
滕青芳(1964—),女,博士,教授,研究方向為控制理論與工程、電氣控制;
李國飛(1991—),男,碩士研究生,研究方向為逆變器容錯控制;
滕青芳
10.15938/j.emc.2016.10.003
TM 301.2
A
1007-449X(2016)10-0015-08
朱建國(1958—),男,博士,教授,研究方向為新型電機設計及其驅動系統控制;
郭有光(1965—),男,博士,副教授,研究方向為電機設計及其優化,電機驅動系統控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
