基于S120伺服驅動模塊111報文的西門子S7-300程序模塊設計
2016-11-03 11:08:46朱曉民
制造業自動化 2016年10期
高 挺,朱曉民,張 希,程 金
(北京機械工業自動化研究所,北京 100120)
基于S120伺服驅動模塊111報文的西門子S7-300程序模塊設計
高 挺,朱曉民,張 希,程 金
(北京機械工業自動化研究所,北京 100120)
針對自動化系統中集成S120伺服驅動模塊時遇到的控制及通訊難題,設計了基于111報文的S7-300通訊控制程序模塊Servo120。使得從事自動化工作的工程師可以通過該模塊簡單、快捷的實現S7控制系統與S120伺服驅動模塊的通訊,并通過報文方式實現S7-300PLC對S120伺服驅動模塊的速度與位置控制。模塊對報文中的控制及狀態字進行詳細解析,大大提高了調試診斷效率。并設置了多點聯動,速度轉換等模式,極大的方便了現場應用,提高了系統集成過程的效率并降低了操作難度。
S120伺服驅動模塊;111報文;程序模塊
0 引言
當今,企業對生產設備的要求是設備生產成本越來越低,但同時能夠提供越來越高的生產效率。SINAMICSS120伺服驅動模塊因恰恰能滿足這些方面的要求而被廣泛應用于自動化系統中。對于自動化系統集成商而言,伺服系統的好處雖然很多,但其與中央控制器的融合過程往往因工程師經驗不足等原因而變得比較困難。本文以S7-300與S120通訊的111報文為基礎,對其進行深入解讀,設計出一款專用通訊控制程序模塊。為S120伺服驅動模塊在以S7-300為核心的自動化系統中的應用帶來了極大的便利。
1 模塊設計的硬件配置及軟件環境
通訊控制程序模塊的設計是基于S7-300的PLC與S120通訊111報文的,因此模塊環境平臺的搭建如下:在S7硬件中配置S120硬件(如圖1硬件配置),在整個項目中集成S7-300CPU作為整個系統的核心控制器、S120伺服驅動模塊、MP277人機交互觸摸屏系統(如圖2項目配置),以圖3網絡連接所示的方式通過PROFIBUS網絡組成統一的系統。
軟件環境需要使用SIMATIC Manager V5.5、Starter、SIMATIC WinCC flexible 2008等編程軟件。
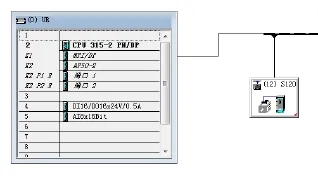
圖1 硬件配置
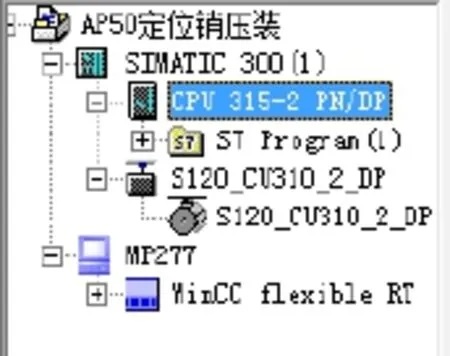
圖2 項目配置

圖3 網絡連接
2 軟件程序模塊Servo120設計
1)輸入輸出接口設置
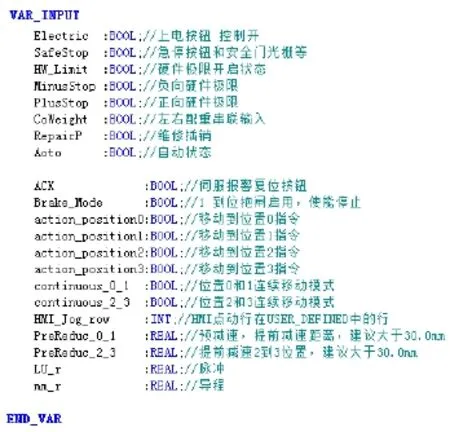
圖4 輸入接口
輸入接口包括設備的上電狀態、安全狀態、極限開關狀態、維修插銷狀態、以及設備的運行狀態等狀態信息;報警復位按鈕、抱閘模式選擇、HMI點動行選擇、移動指令、移動模式設定等指令模式信息;系統絲杠導程、每轉的脈沖數等系統參數信息。方便調試工程師各種輸入信息的調整,如圖4所示。
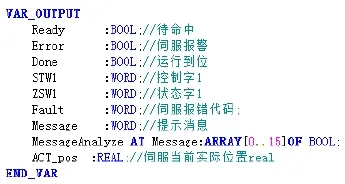
圖5 輸出接口
輸出接口包括反饋的伺服系統運行狀態、錯誤報警信息、控制狀態字信息、消息報錯代碼以及伺服當期位置等基本信息。從而幫助調試工程師通過輸出反饋進行診斷,便于設備調試,如圖5所示。
2)模塊內部時鐘設置
模塊內置單獨脈沖驅動時鐘,不占用系統定時器資源,減少了模塊程序使用時由于定時器的使用導致的系統內部沖突,如圖6所示。
3)模塊控制字狀態字解析
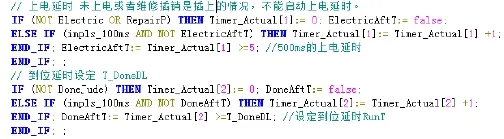
圖6 模塊內部時鐘
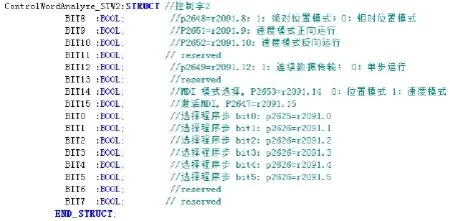
圖7 狀態字解析
程序模塊內部將控制字和狀態字以二進制變量形式進行逐點解析,便于以更詳細的狀態展示當前系統的問題。可以更好的便于調試工程師進行狀態分析,如圖7所示。
4)模塊操作模式設定
程序模塊根據輸入設定及最廣泛的應用方式設定伺服驅動模塊的工作狀態,修改相應參數將可以修改伺服的運行模式狀態,如圖8所示。
5)伺服移動位置給定及位置到達判定,如圖8所示。
3 程序模塊的使用
將多種功能融為一體的程序模塊Servo120,最多可實現16個可變位置的伺服定位控制;可以手動切換抱閘工作模式;能實現多點聯動,并按照預設位置自動切換移動速度;同時實現HMI行的自動配置,點動前后移動控制;以及絲杠導程、單轉脈沖的單獨配置;同時對報警狀態、控制字狀態字及實際位置進行實時顯示。

圖8 操作模式設定

圖9 位置設定及判定
伺服驅動模塊使用之前,應先設置當前系統需要的所有位置及速度信息(即需首先完成圖10Target參數數組的賦值)。設置完成后,即可啟動移動指令,如圖11所示)。

圖10 目標位置速度

圖11 移動指令當前位置
Target數組可存儲16個位置和速度數據,能滿足大多數自動化設備專機使用。Action_position移動指令數組可接收對應的移動指令,并在Present_position數組中反饋當前移動位置。
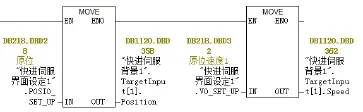
圖12 速度位置設定
簡單給程序模塊Servo120賦值即可完成位置和速度的設定,把設定值作為變量關聯到HMI人機界面上將實現位置和移動速度的可視化修改,為設備的調整提供了便利務件。給Servo120程序模塊發出伺服移動指令Action position[n],Servo120程序模塊將控制伺服驅動模塊以設定速度移動到相應設定位置n,并反饋到位信號。
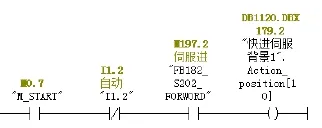
圖13 移動指令
4 結論
本文設計了一種基于西門子111報文的S7-300的PLC與S120伺服驅動模塊通訊控制模塊Servo120。該模塊在大眾211項目中得到驗證并廣泛應用。程序模塊Servo120運行穩定可靠、兼容性好、并且擴展性強。項目中廣泛的應用使得項目調試進度大大提高,并減少了出錯率,提高了控制系統伺服驅動部分的穩定性,充分體現了模塊化程序的優越性。該模塊會為帶有S120伺服驅動模塊的項目,在實施中提供了一務快捷、可靠的解決方案。
[1] 阮毅.陳伯時.電力拖動自動控制系統--運動控制系統[M].北京:機械工業出版社,2009.
Siemens S7-300 program modules design based on 111 packets of S120 servo system
GAO Ting, ZHU Xiao-min, ZHANG Xi, CHENG Jin
TP23
B
1009-0134(2016)10-0067-03
2016-08-15
高挺(1980 -),男,哈爾濱人,工程師,本科,主要從事流體傳動系統與汽車制造裝備的設計研究工作。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電信科學(2016年10期)2016-11-23 05:11:56