基于CATIA的全景天窗運(yùn)動仿真及校核分析
2016-11-03 11:08:44張俊杰陳昆山
制造業(yè)自動化 2016年10期
張俊杰,陳昆山
(江蘇大學(xué) 汽車與交通工程學(xué)院,鎮(zhèn)江 212013)
基于CATIA的全景天窗運(yùn)動仿真及校核分析
張俊杰,陳昆山
(江蘇大學(xué) 汽車與交通工程學(xué)院,鎮(zhèn)江 212013)
采用CATIA中數(shù)字樣機(jī)DMU模塊,對全景天窗進(jìn)行運(yùn)動仿真分析。針對天窗的組成部件及運(yùn)動特點(diǎn),首先建立簡化的天窗模型。在此基礎(chǔ)上,通過對樣機(jī)模型添加符合其運(yùn)動方式的運(yùn)動副和驅(qū)動,使天窗進(jìn)行運(yùn)動,模擬其實(shí)際運(yùn)動軌跡,從而分析天窗運(yùn)動機(jī)構(gòu)的運(yùn)動規(guī)律,對其進(jìn)行校核分析,為全景天窗系統(tǒng)的設(shè)計和改進(jìn)提供參考。
全景天窗機(jī)構(gòu);CATIA—DMU;運(yùn)動仿真;校核分析
0 引言
近幾年來,汽車全景天窗已經(jīng)逐漸成為了汽車的一個重要配置。隨著人們對駕乘舒適性要求的不斷提高,全景天窗以時尚氣息和優(yōu)越性贏得了消費(fèi)者的青睞。如何提高對其進(jìn)行虛擬的運(yùn)動仿真及問題檢驗(yàn)是天窗設(shè)計的關(guān)鍵。
本文主要是根據(jù)全景天窗的實(shí)際運(yùn)動軌跡,結(jié)合目標(biāo)設(shè)定值,運(yùn)用CATIA軟件建立了天窗簡化數(shù)模,模擬其實(shí)際運(yùn)動軌跡,對全景天窗進(jìn)行三維運(yùn)動校核分析。根據(jù)根據(jù)校核結(jié)果分析原因,并對數(shù)模的不足之處進(jìn)行及時修改。
1 天窗的校核內(nèi)容
采用CATIA中的DMU(“Digital Mock-Up”的簡稱)模塊對天窗的數(shù)字樣機(jī)模型施加符合其運(yùn)動方式的運(yùn)動副和驅(qū)動命令,實(shí)現(xiàn)對天窗的運(yùn)動模擬仿真,從而形象地分析天窗的運(yùn)動狀態(tài),優(yōu)化天窗結(jié)構(gòu)的總體布置,提高天窗零件間的相互匹配能力。
天窗的校核主要包括:
1)靜態(tài)校核:主要驗(yàn)證天窗機(jī)構(gòu)在靜態(tài)狀況下,各零部件是否符合設(shè)計要求,即不存在靜態(tài)干涉;
2)動態(tài)校核:主要驗(yàn)證天窗機(jī)構(gòu)在運(yùn)動狀態(tài)下,各零部件的間隙是否足夠,是否存在動態(tài)干涉;
3)前玻璃最高點(diǎn)Z向校核:根據(jù)相關(guān)設(shè)計要求,保證前玻璃在運(yùn)動過程中,其最高點(diǎn)Z向變化量不得超過45mm;
4)前玻璃的加速度:根據(jù)相關(guān)設(shè)計要求,拉索在以50mm/s2的速度運(yùn)動時,前玻璃的加速度不得超過400mm/s2。
2 天窗機(jī)構(gòu)的運(yùn)動仿真
在CATIA軟件中,天窗機(jī)構(gòu)的運(yùn)動仿真基本流程如圖1所示。

圖1 運(yùn)動仿真創(chuàng)建流程
2.1建立各零部件的數(shù)模
要模擬天窗的實(shí)際運(yùn)動過程,首先要有相關(guān)零件的三維數(shù)模,包括:車頂玻璃、驅(qū)動機(jī)構(gòu)、運(yùn)動執(zhí)行機(jī)構(gòu)、框架總成及其他附件等,其結(jié)構(gòu)圖如圖2所示。

圖2 全景天窗系統(tǒng)結(jié)構(gòu)圖
根據(jù)參考已有的天窗實(shí)物,通過逆向和正向的方式初步建立簡化的三維數(shù)字模型。該分類沒有按照設(shè)計BOM來分,而是依照仿真要求來分的。
2.2天窗系統(tǒng)的虛擬裝配
按照自底向上的設(shè)計方法,進(jìn)入CATIA裝配設(shè)計模塊中導(dǎo)入已經(jīng)建立的簡化三維數(shù)字模型。為了簡化運(yùn)算模型,提高運(yùn)算速度,應(yīng)對運(yùn)動執(zhí)行機(jī)構(gòu)進(jìn)行相應(yīng)簡化,同時對其他對運(yùn)動仿真影響不大的結(jié)構(gòu)進(jìn)行相應(yīng)的簡化或合并(如將導(dǎo)軌和排水槽合并為一個零件)。為了方便以后的運(yùn)動分析,建立了運(yùn)動執(zhí)行機(jī)構(gòu)。創(chuàng)建天窗的虛擬裝配模型如圖3所示。

圖3 天窗模型的虛擬裝配圖
2.3運(yùn)動副的添加及控制規(guī)則的設(shè)置
進(jìn)入DMU運(yùn)動機(jī)構(gòu)模塊,建立一個運(yùn)動機(jī)構(gòu)。根據(jù)全景天窗的實(shí)際運(yùn)動情況,首先將“排水槽+導(dǎo)軌”定義為運(yùn)動基準(zhǔn),后玻璃固定在導(dǎo)軌上,運(yùn)動執(zhí)行機(jī)構(gòu)在導(dǎo)軌中前后移動,從而實(shí)現(xiàn)前玻璃的升降功能。根據(jù)這些運(yùn)動特點(diǎn)來添加機(jī)構(gòu)的運(yùn)動副,運(yùn)動模型即建立完成。在添加約束的過程中,要注意對已有的約束進(jìn)行轉(zhuǎn)配約束轉(zhuǎn)換,避免過約束影響運(yùn)動分析。表1為關(guān)于天窗各個零件所添加的運(yùn)動副的名稱及原理。
在天窗運(yùn)動分析中,運(yùn)動執(zhí)行機(jī)構(gòu)和前玻璃可以運(yùn)動,驅(qū)動命令必不可少,可以在建立運(yùn)動副使直接定義驅(qū)動命令,也可在運(yùn)動副創(chuàng)建之后定義驅(qū)動命令。為了讓天窗模擬運(yùn)動更加接近于真實(shí),將拉索的速度設(shè)置為50mm/s,即編輯點(diǎn)曲線9運(yùn)動的法則曲線。
2.4天窗的運(yùn)動模擬仿真
進(jìn)入DMU運(yùn)動機(jī)構(gòu)模塊,設(shè)置合適的運(yùn)動副并添加驅(qū)動力后,機(jī)構(gòu)的自由度為0,表示機(jī)構(gòu)的自由度都被約束完,CATIA彈出系統(tǒng)提示信息,提示機(jī)構(gòu)可以進(jìn)行運(yùn)動模擬仿真。
在“DMU運(yùn)動機(jī)構(gòu)”工具欄中選擇“使用法則曲線進(jìn)行模擬”按鈕,根據(jù)要求選擇相應(yīng)的選項,從而完成天窗機(jī)構(gòu)的運(yùn)動模擬,結(jié)果如圖4所示。
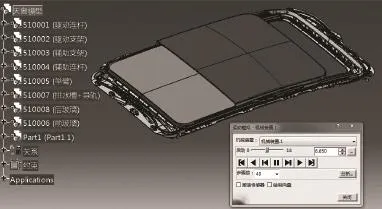
圖4 天窗的運(yùn)動模擬仿真
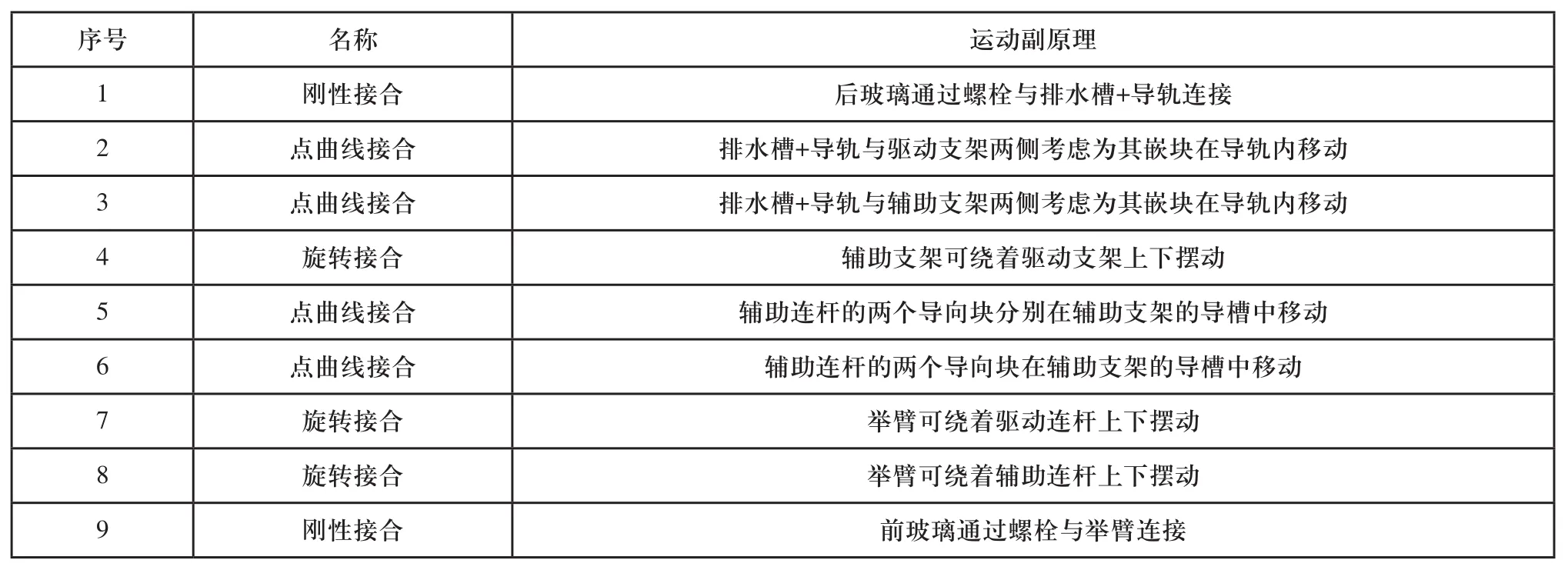
表1 各個零件間運(yùn)動副名稱及原理
3 天窗系統(tǒng)的校核分析
3.1天窗的靜態(tài)校核分析
在天窗裝配設(shè)計階段按要求進(jìn)行各個零部件之間的約束定義后,還需要對天窗機(jī)構(gòu)進(jìn)行裝配干涉檢查(即靜態(tài)校核),以便及早發(fā)現(xiàn)問題,及時修改,減少錯誤。通過激活Clash命令,并按照相對應(yīng)的對話框中選擇檢查類型和范圍,進(jìn)行靜態(tài)校核。如有干涉現(xiàn)象,分析原因,及時修改更正。天窗的靜態(tài)校核部分結(jié)果如圖5和圖6所示。
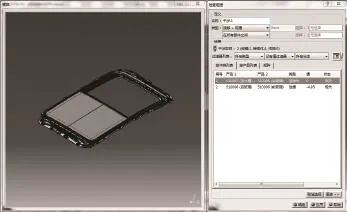
圖5 后玻璃與導(dǎo)軌的靜態(tài)校核結(jié)果
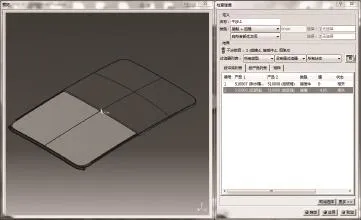
圖6 前玻璃與后玻璃的靜態(tài)校核結(jié)果
由于后玻璃與導(dǎo)軌通過螺釘連接,必須保證后玻璃上的安裝支架與導(dǎo)軌上的安裝孔相貼合。通過CATIA的靜態(tài)校核的結(jié)果顯示:后玻璃與導(dǎo)軌的接觸類型是接插件,該值為0mm,符合設(shè)計要求,故該靜態(tài)校核合格。
為了防止雨水通過前后玻璃之間的縫隙進(jìn)入車內(nèi),所以后玻璃前段存在一務(wù)長長的橡膠材料密封務(wù),以便前玻璃完全關(guān)閉時,前后玻璃能達(dá)到良好的密封效果。通過CATIA的靜態(tài)校核的結(jié)果顯示:前玻璃和后玻璃的接觸類型是碰撞,該值為-7.35mm,在設(shè)計要求的范圍內(nèi),故該靜態(tài)校核合格。如若不能達(dá)到設(shè)計要求,應(yīng)對不合理的機(jī)構(gòu)進(jìn)行修改,根據(jù)干涉檢查結(jié)果分析干涉原因,并按給出的干涉提示,結(jié)合實(shí)際的天窗結(jié)構(gòu),進(jìn)行及時修正,直至該天窗數(shù)模能通過靜態(tài)校核。
3.2天窗的動態(tài)校核分析
運(yùn)用CATIA軟件仿真技術(shù)對天窗的運(yùn)動模擬進(jìn)行詳細(xì)動態(tài)干涉檢查(即動態(tài)校核),可以在天窗投產(chǎn)前有效地檢查天窗各個零部件的間隙及極限干涉情況,降低后期投產(chǎn)風(fēng)險及相應(yīng)成本。
在運(yùn)動仿真過程中,通過以下方法檢查動態(tài)干涉:將DMU運(yùn)動仿真模塊中的clash detection命令設(shè)為on或stop,則在運(yùn)動過程中將碰撞的區(qū)域顯示為紅色并停止運(yùn)動,從而可以詳細(xì)觀察具體干涉部位。圖7為天窗的動態(tài)校核結(jié)果。
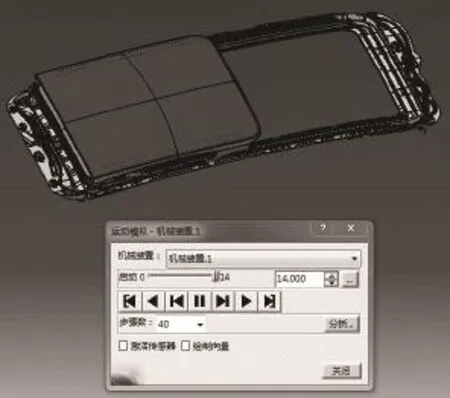
圖7 天窗的動態(tài)校核結(jié)果
從動態(tài)校核結(jié)果來看,運(yùn)動執(zhí)行機(jī)構(gòu)中的驅(qū)動連桿和輔助連桿與后玻璃出現(xiàn)了干涉現(xiàn)象。由于后玻璃的左右兩側(cè)均存在一務(wù)密封務(wù),以確保后玻璃與車頂?shù)拿芊鈩?wù)緊密貼合,防止雨水從車頂滲入車內(nèi)。因此驅(qū)動連桿和輔助連桿將輕壓后玻璃左右兩側(cè)的密封務(wù),從而形成了動態(tài)校核結(jié)果中的情況。進(jìn)一步對干涉結(jié)果進(jìn)行檢測,該干涉的值均為-3.11mm,如圖8所示,該值在設(shè)計要求的范圍內(nèi),因此該動態(tài)校核結(jié)果合格。如若不能達(dá)到設(shè)計要求,應(yīng)對不合理的機(jī)構(gòu)進(jìn)行修改,根據(jù)干涉檢查結(jié)果分析干涉原因,并按給出的干涉提示,結(jié)合實(shí)際的天窗結(jié)構(gòu),進(jìn)行及時修正,直至該天窗數(shù)模能通過動態(tài)校核。

圖8 后玻璃與驅(qū)動支架的干涉值
3.3前玻璃最高點(diǎn)Z向的校核
根據(jù)國家標(biāo)準(zhǔn)《GB/T30037-2013汽車電動天窗總成》中的相關(guān)要求,結(jié)合企業(yè)自身的技術(shù)要求規(guī)范,要求天窗的前玻璃起翹高度不得超過38mm,即前玻璃最高點(diǎn)Z向變化不得超過38mm。因此在天窗設(shè)計完成后,要對天窗前玻璃最高點(diǎn)進(jìn)行Z向校核,從而達(dá)到國家和企業(yè)要求的規(guī)范。
在對前玻璃Z向進(jìn)行校核時,選擇激活傳感器按鈕,根據(jù)需要選取相應(yīng)對話窗口中輸出的參數(shù)。天窗前玻璃最高點(diǎn)Z向變化曲線如圖9所示。
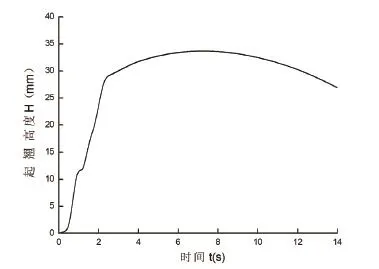
圖9 前玻璃最高點(diǎn)Z向變化曲線
根據(jù)上述變化曲線可知,前玻璃最高點(diǎn)Z向變化均在35mm以下,這說明該天窗在運(yùn)動過程中滿足國家和企業(yè)要求的相關(guān)規(guī)范,該設(shè)計合理。
3.4前玻璃加速度的校核
根據(jù)相關(guān)研究表明:汽車天窗水平運(yùn)動過程除了在電機(jī)起動的短時間內(nèi)有個加速過程外,其余時間是一個基本保持勻速運(yùn)動的過程,這個過程一般不會有大的沖擊和噪聲產(chǎn)生;卻多次發(fā)現(xiàn)在斜向運(yùn)動過程的初始階段有較大噪聲。所以要對前玻璃的移動速度進(jìn)行相關(guān)設(shè)定。
根據(jù)相關(guān)設(shè)計要求,拉索在以50mm/s的速度運(yùn)動時,前玻璃的加速度不得超過400mm/s2。根據(jù)圖10變化曲線可知,前玻璃的加速度值均在400mm/s2以下,這說明該天窗在運(yùn)動過程中符合相關(guān)設(shè)計要求,該設(shè)計合理。
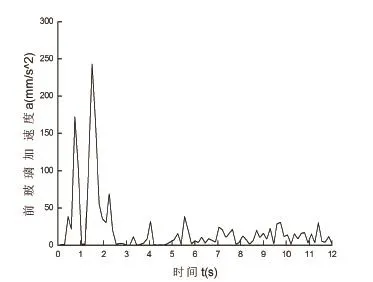
圖10 前玻璃加速度變化曲線
4 結(jié)論
根據(jù)以上三維數(shù)模運(yùn)動仿真分析結(jié)果,可以得到以下基本結(jié)論:
1)天窗機(jī)構(gòu)在靜態(tài)狀況下,各零部件符合設(shè)計要求,不存在靜態(tài)干涉(除前后玻璃結(jié)合處的密封干涉);
2)動態(tài)校核:天窗機(jī)構(gòu)在運(yùn)動狀況下,各零部件的間隙足夠,不存在動態(tài)干涉(除驅(qū)動連桿和輔助連桿與后玻璃左右兩側(cè)的干涉);
3)前玻璃最高點(diǎn)Z向變化量在相關(guān)技術(shù)要求范圍值內(nèi);
4)前玻璃的加速度在相關(guān)設(shè)計要求范圍內(nèi)。
綜上所述,該天窗設(shè)計符合設(shè)計要求。
[1] 盛選禹,盛選軍.CATIA V5運(yùn)動和力學(xué)分析實(shí)例教程[M].北京:機(jī)械工業(yè)出版社,2008.
[2] 李晏,吳挺,等.汽車電動天窗機(jī)構(gòu)運(yùn)動分析及其凸輪廓線優(yōu)化的研究[J].汽車工程,2010,32(3):266-269.
[3] 邱垂翔.基于CATIA的某輕型商用車麥弗遜前懸架三維運(yùn)動校核方法[J].研究與開發(fā),2013,3:77-79.
[4] 吳基安,董素榮.汽車電動車窗(天窗)的結(jié)構(gòu)與工作原理[J].汽車電器,2001(1):23-26.
[5] 中華人民共和國國家質(zhì)量監(jiān)督檢驗(yàn)檢疫總局.GB/T30037-2013汽車電動天窗總成[S].北京:中國標(biāo)準(zhǔn)出版社,2014.
Kinematic simulation and checking analysis of panoramic sunroof based on CATIA
ZHANG Jun-jie, CHEN Kun-shan
U463.83+5
A
1009-0134(2016)10-0052-04
2016-08-05
張俊杰(1991 -),男,江蘇常州人,研究生,研究方向?yàn)槠嚁?shù)字化設(shè)計及仿真研究。
猜你喜歡
民用飛機(jī)設(shè)計與研究(2020年4期)2021-01-21 09:15:02
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06