基于SAW原理汽車轉向扭矩測量的研究*
2016-10-26 07:45:30李志鵬李曉英
傳感技術學報 2016年5期
李志鵬,李曉英
(東北林業大學交通學院,哈爾濱150040)
基于SAW原理汽車轉向扭矩測量的研究*
李志鵬*,李曉英
(東北林業大學交通學院,哈爾濱150040)
針對市場上已有的電動助力轉向EPS(Electric Steering System)扭矩測量裝置存在的易受噪聲干擾、壽命較短、構造復雜且供電困難等缺點[1],提出基于聲表面波SAW(Surface Acoustic Wave)原理對轉向扭矩進行測量的方案,能夠進一步實現EPS系統扭矩測量裝置的輕型化和數字化。基于COMSOL軟件強大的物理分析功能,對測量方案中關鍵的主軸和壓電基片進行理論和仿真研究,并且基于Matlab軟件對仿真結果進行統計和分析,驗證了該方案的可實施性。
物理量傳感器;轉向扭矩;聲表面波原理;COMSOL;Matlab
EEACC:7230doi:10.3969/j.issn.1004-1699.2016.05.024
電動助力轉向系統EPS(Electric Power Steering)是目前應用于汽車轉向控制最為常見的系統,EPS系統是由轉向扭矩傳感器來感知駕駛員的轉向意圖,ECU根據檢測的扭矩信號進行計算,進而控制電機提供給相應的輔助轉向動力,然后通過減速機構來提高助力轉矩和降低轉速,從而實現駕駛者在駕駛過程中靈活轉向的目標。由此可知,扭矩傳感器是汽車轉向系統最重要的部件之一,其輸出特性直接影響到EPS系統的控制性能,因此,對扭矩傳感器的研究和開發對汽車轉向行業具有重大的意義。
目前,電動助力轉向系統的常用扭矩測量裝置主要分為電位計式、光式、電磁感應式以及霍爾式等。電位計式扭矩測量裝置成本較低,但由于屬于接觸式裝置,工作時產生的磨損造成其壽命較短且測量精度容易受到影響;光電式扭矩測量裝置,測量精度高,響應速度快,但安裝密封性要求較高且價格較貴;電磁感應式扭矩測量裝置結構簡單,利于集成化,但由于自身攜帶的永磁體容易受到外界磁場的影響;霍爾式扭矩測量裝置的靈敏度和線性度都較好,但其本身攜帶的磁性元件,測量結果容易受溫度的影響且結構復雜[1]。因此,電位計式、光式、電磁感應式以及霍爾式都因其技術上存在的不足,將逐漸被新的扭矩測量方式取代。聲表面波技術是電子學、聲學、光學、半導體平面工藝和微細工藝相結合產生的一種新興的科學技術領域,其特點是沿著壓電材料表面傳播,且該機械波對壓電材料表面的擾動十分敏感,易于獲得較高的靈敏度[2-3],應用于扭矩測量的新型測量技術。本文針對汽車轉向扭矩的測量環境和要求,基于應變片工作原理和聲表面波傳播理論,提出基于聲表面波原理對轉向扭矩進行測量的方案,并對方案中的主軸和壓電基片進行理論和仿真分析,驗證了方案的可實施性。
1 理論依據
根據材料力學相關理論[4],最大剪切應力與轉向軸輸入扭矩的關系為

其中,τmax為軸面上最大剪應力,R為轉軸半徑。由切應力互等定理可知,軸體上的單元體四個側面受力大小相等,處于純剪切狀態[4]。同取軸體上的單元體A如圖1,進行平面二向力狀態分析,假定斜截面的面積為dA,與y軸夾角為α,根據法向力和切向力平衡,可知轉軸上任意橫截面所受應力為
因此,當α=±45 °時,正應力σa=±τmax,而切應力τq為零。因此,壓電基片沿著軸向45°和軸向135°進行粘貼,此處位置只收到最大的拉應力和壓應力。軸體上,拉應變和壓應變為
其中,E為材料的彈性模量,u為材料的泊松比。所以,通過檢測出軸向±45 °方向的應變,即可得到轉軸的扭矩M。

圖1 轉向軸力學理論分析
2 彈性體的設計
本文基于聲表面波諧振器設計的轉向扭矩傳感器,彈性軸是扭矩傳感器的重要部件之一,其彈性軸體材料的選擇直接影響著傳感器的測量精度以及準確性。汽車轉向扭矩傳感器的工作范圍為-40 N/m~+40 N/m,圓軸作為彈性體,軸體材料選擇為60Si2Mn彈簧鋼,能夠承受較大的變形,具有良好的工藝性和力學性能,彈性模量為206 MPa,泊松比為0.26,最大許用應力為1 200 MPa,材料密度為7 800 kg/m3[5],根據理論計算和汽車轉向扭矩傳感器的實際工作環境,確定軸體直徑為10 mm。根據國內外對SAW壓電材料的研究[6-9],本文中壓電基片材料選定為石英晶體,切型為ST,材料的特性參數見參考文獻[10]。借助于COMSOL Multiphysics 5.0的力學仿真模塊,對彈性軸體和壓電晶片一體化仿真。
圖2為彈性體軸受到最大扭矩40 N/m時的應力分布云圖,軸體表面受力較為均勻,無應力集中現象,應力最大值3.57×108N/m2均勻分布在軸體表面,軸心處應力為0 N/m2,與理論計算值基本一致。本文通過對轉向扭矩傳感器整體機械結構的優化,最后采用的軸體結構如圖3所示,在軸體表面兩側,加工出20 mm×6 mm的平面,向軸體直徑方向銑入的深度為1 mm,選定其中一面作為工作平面,粘貼壓電晶片,施加最大扭矩40 N/m時,彈性軸體應力最大值為8.42× 108N/m2,小于許用應力值1 200 MPa,且變形范圍為0~0.07 mm,沿著軸向45°和軸向135°分布的壓電晶片受力均勻,應力值分布在5.883×108Pa左右,沿著晶片電軸的應變范圍為0.06%~0.76%,且壓電晶片中間區域應變分布均勻,將叉指換能器的位置安排在受力均勻的區域,其應變值隨著扭矩的變化而成線性變化。
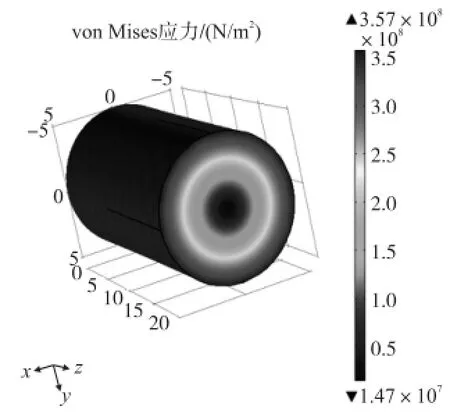
圖2 M=40 N/m,彈性軸體的應力分布云圖
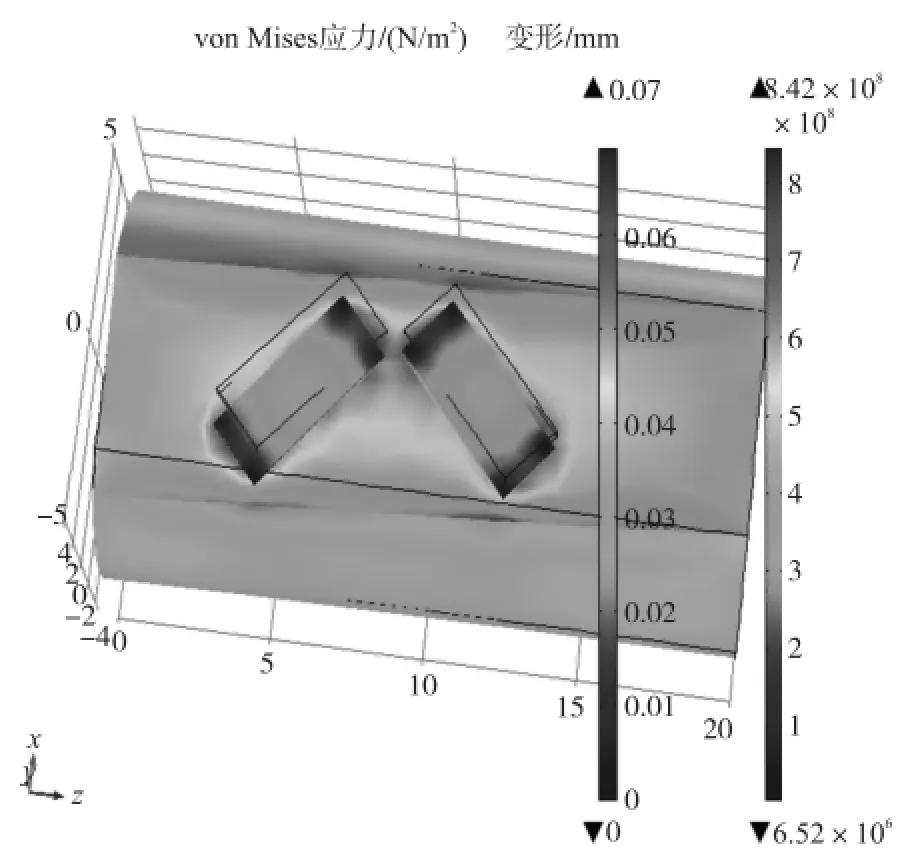
圖3 M=40 N/m,彈性軸體和壓電晶片一體化應力分布云圖
3 SAW器件二維仿真分析
3.1模型建立
有限元分析中,模態是機械結構的固有振動特性,每個模態具有相對應的特征頻率和模態振型,基于COMSOL軟件,可以對SAW器件進行有限元分析,從而仿真出其頻率特性[11]。
聲表面波器件二維簡化仿真模型以及邊界的條件設定如圖4所示。二維模型各參數如表1所示。
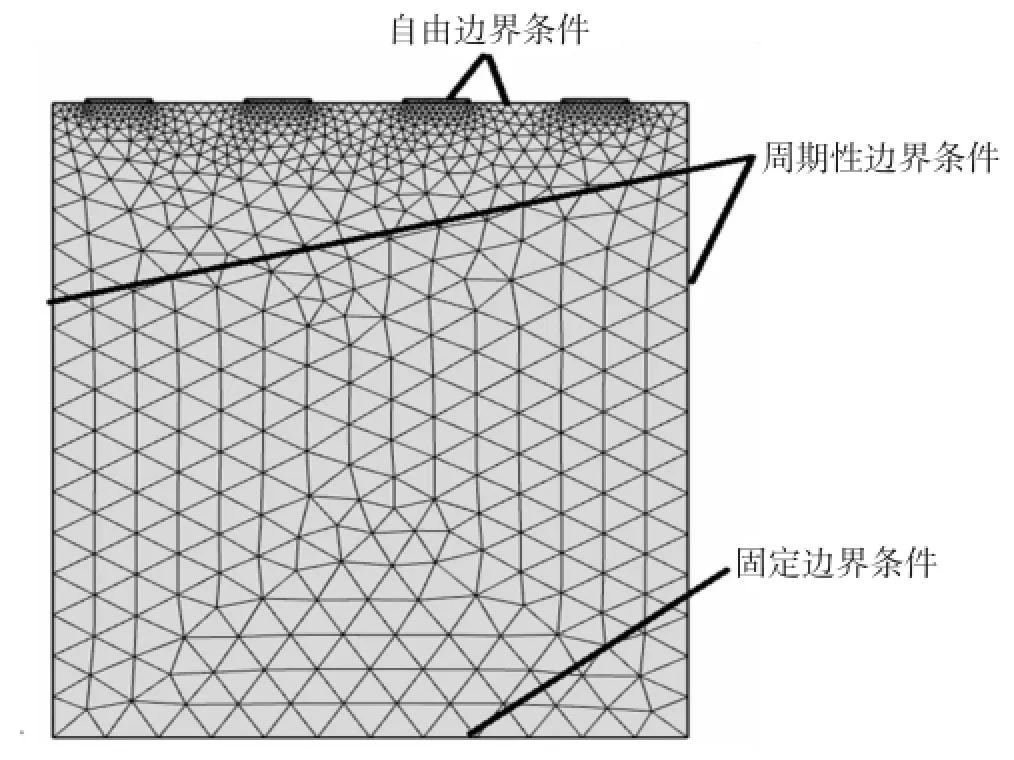
圖4 SAW器件二維分析模型
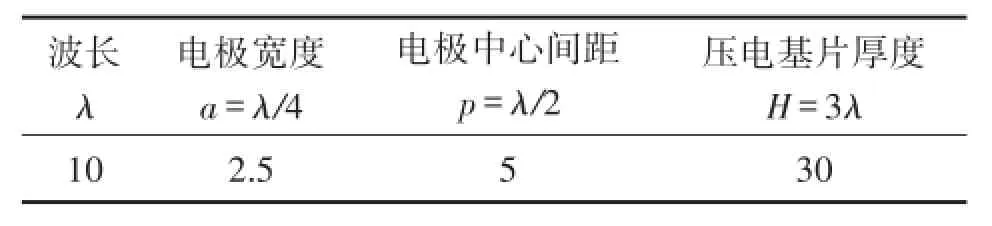
表1 SAW器件二維模型基本參數單位∶μm
3.2叉指電極結構的設計
聲表面波器件的工作原理是利用叉指換能器激發并接收聲表面波,從而達到信號的傳遞和截取[12],在COMSOL軟件的特征頻率分析模塊中,叉指電極厚度從0 um到2 um以0.2 um的間隔增加,依次做11組仿真實驗,仿真結果如表2所示,當叉指電極厚度為0,即壓電基片沒有叉指電極薄膜時,只存在唯一的聲表面波振型,當壓電基片上沉積叉指電極時,利用COMSOL軟件進行有限元分析過程中,能夠提取出兩個符合聲表面波振型的特征頻率,分別定義為正特征頻率fsc+以及反特征頻率fsc-,從仿真數據結果可知,隨著叉指厚度的增加,正、反特征頻率向低頻轉移,為了達到更好的聲學性能,后續的SAW器件二維應變仿真中,叉指厚度h定為0.2 um,本文研究的SAW器件,選用均勻叉指換能器,因此叉指寬度d=a=λ/4固定不變,即忽略外界壓力對叉指的影響。
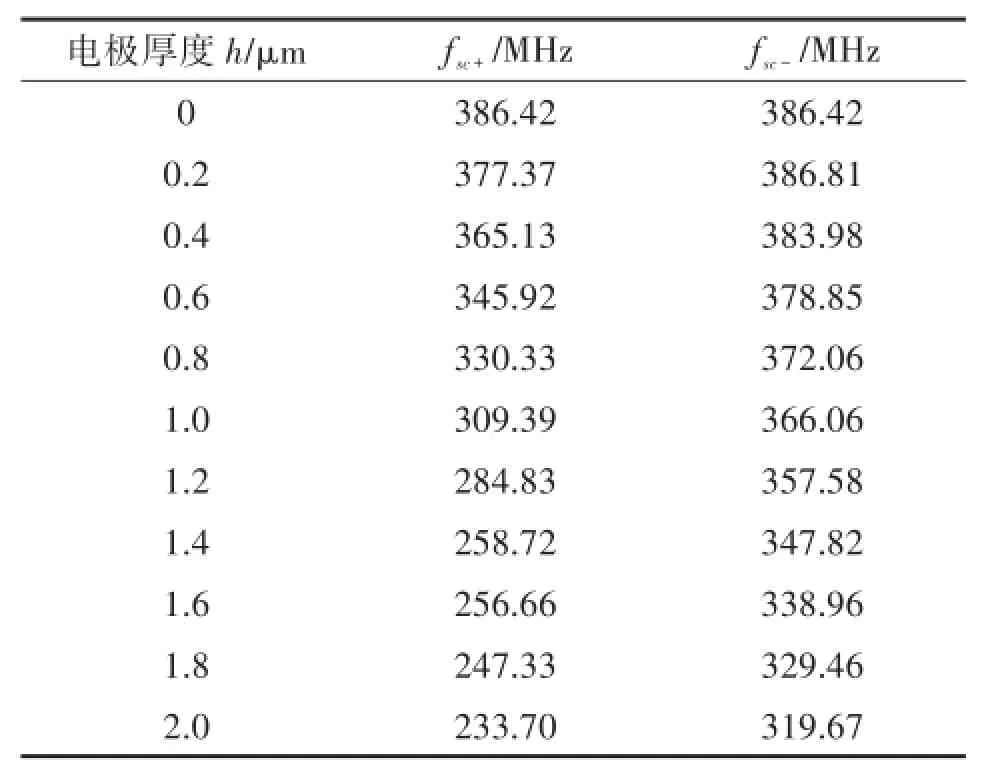
表2 聲表面波特征頻率隨電極厚度h的變化
3.3SAW器件的應變分析
由前面的彈性軸體的靜態分析可知,沿著軸向45 °和軸向135 °分布的壓電基片受力均勻,且大小基本一致,與理論分析相符合,產生的應變大小相等,方向相反,具體計算過程可見參考文獻[13]。通過對SAW器件靜態力學的多次仿真,可知,壓電晶片應變隨著拉應力或壓應力的增大(減小)而呈線性增大(減小),因此,在SAW器件的二維仿真模型中,為了獲得理想的聲表面波振型,對壓電晶片施加拉應力和壓應力,使壓電晶片產生均勻的應變,同時進行穩態以及頻域特征的求解,如圖5、圖6所示,應變為+20%時,正特征頻率316.31 MHz和反特征頻率321.99 MHz的振型圖,從圖中,可知聲表面波的能量主要集中在表面下1個~2個波長范圍內,振動最大的位移分別為1.26×10-3μm和4.58×10-3μm,聲表面波特征頻率隨著應變的具體變化如表3所示。
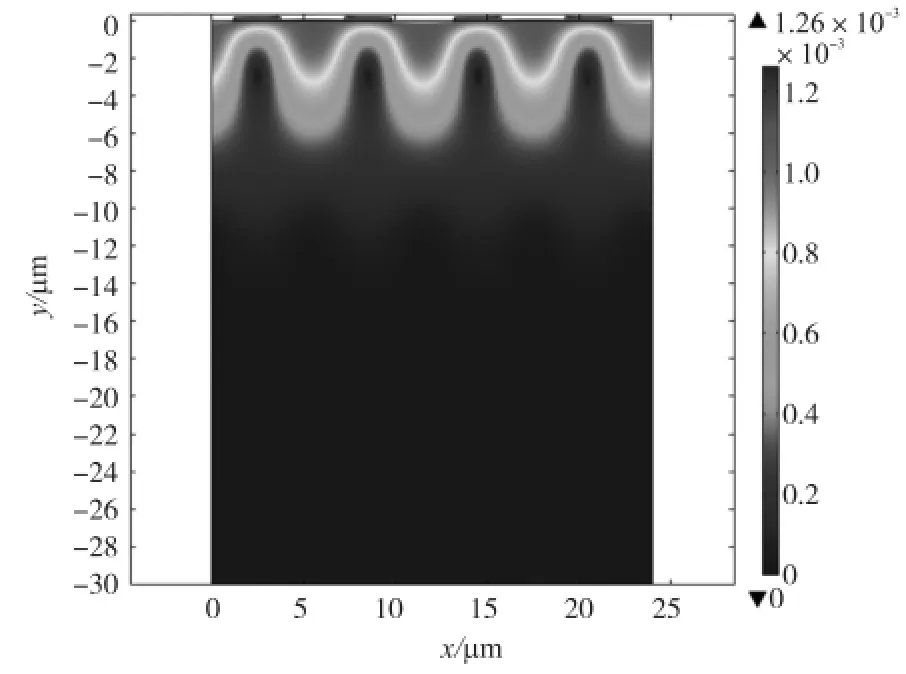
圖5 應變ε=20%,正特征頻率fsc+=316.31 MHz振型圖
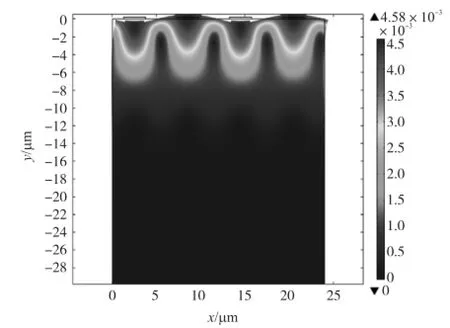
圖6 應變ε=20%,反特征頻率fsc-=321.99 MHz振型圖
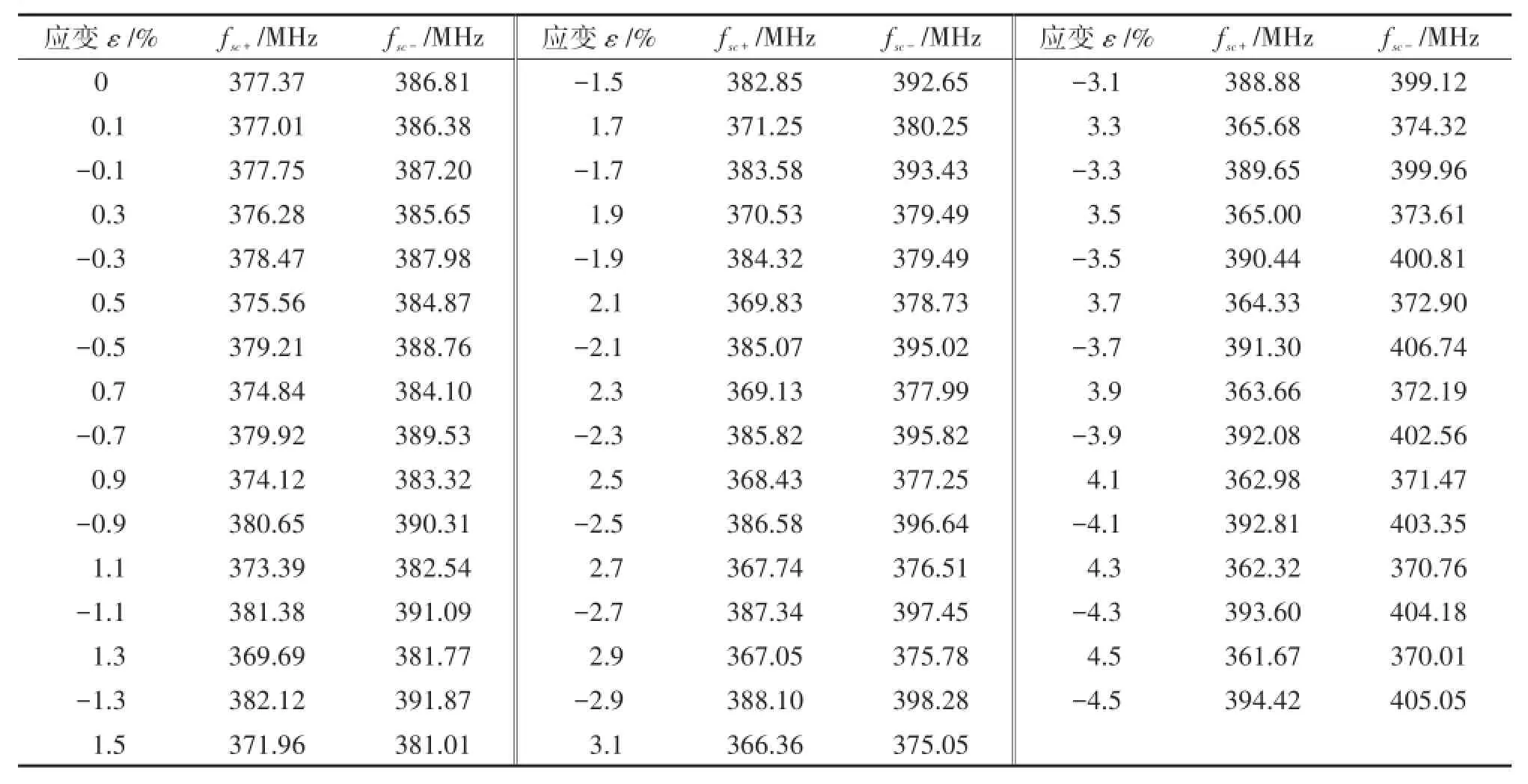
表3 聲表面波頻率隨應變的變化
3.4溫度影響的消除
汽車轉向扭矩傳感器在工作的時候會受到環境的影響,環境的變化會干擾扭矩檢測的結果,本文采用差動結構(見圖3)來測量扭矩,差動結構由兩個諧振器組成,兩個聲表面波諧振器性能相似,感受相反的應變量ε和相同的環境變量δ[14-15],即

式(5)、式(6)進行多項式展開,忽略高階項保留二次項,即
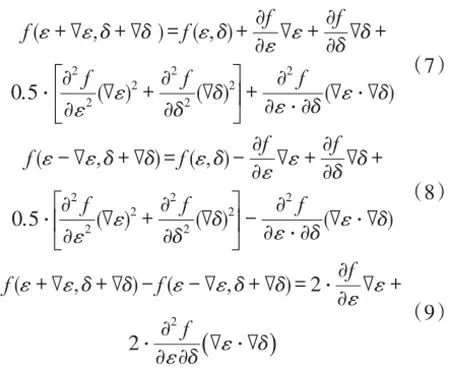
彈性軸體的應變與環境影響之間的關系可認為為相互獨立且線性無關的,則因此,采用差動結構時,統計兩個聲表面波器件的頻率差即可消除溫度對扭矩檢測的影響,同時被測量的輸出信號差提高一倍,頻率檢測范圍降低一個級別,能夠有效的降低后續信號檢測電路成本[15]。將前面的仿真數據進行統計,并利用Matlab軟件中曲線擬合箱cftool進行數據分析,圖7為統計分析擬合的線性曲線圖,由圖7可以看出,正特征頻率差?fsc+和反特征頻率差?fsc-都隨著應變的增加而成線性增加,二者擬合公式近似為

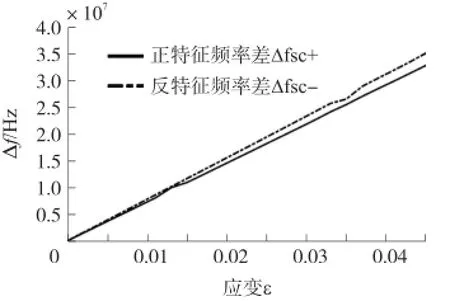
圖7 SAW器件的特征頻率分析
4 結論
本文基于對汽車轉向扭矩傳感器以及聲表面波器件的研究與學習,提出一種新型的聲表面波式轉向扭矩傳感器,并通過COMSOL軟件,對軸體和壓電基片進行力學分析。然后對SAW器件進行簡化,通過COMSOL軟件的特征頻率分析模塊對SAW器件進行二維的叉指厚度仿真分析以及應變仿真分析。仿真結果如下:①壓電基片沿著軸向45°和軸向135°粘貼在軸體上時,壓電基片以及軸體在受到外界扭矩作用時,彈性軸體表面應力分布均勻,沿著軸向45°和軸向135°分布的壓電晶片受力均勻,應力值分布在5.883×108Pa左右,沿著晶片電軸的應變范圍為0.06%~0.76%,且與輸入的扭矩成線性變化關系;②叉指換能器的電極效應會產生正、反兩種聲表面波特征頻率,并且隨著叉指電極厚度的增加,器件的兩種特征頻率整體向低頻轉移,為了達到更好的聲叉指厚度h定為0.2 μm;③本文采用差動結構進行扭矩的測量,經過計算表明,差動結構可以有效的抑制溫度對轉向扭矩測量的影響,輸出信號的范圍降低一個級別,能夠降低后續的信號檢測成本,通過Matlab軟件中曲線擬合箱cftool進行數據分析,正特征頻率差?fsc+和反特征頻率差?fsc-都隨著應變的增加而成線性增加,二者擬合公式分別近似為?fsc+=7.27×102·ε+0.022 5和?fsc-=7.75×102·ε-0.124 9;④通過對彈性軸體和壓電基片一體化的仿真分析以及SAW器件的二維仿真分析,驗證了輸入扭矩與差動結構輸出信號及SAW頻率差是呈線性變化的,因此,差動結構可通過測量兩個SAW器件的頻率差,從而測出扭矩的值,整體驗證了該方案的可行性,為后面的方案整體的系統設計奠定基礎,便于進一步的優化設計。
[1]王巖,儲江偉.扭矩測量方法現狀及發展趨勢[J].林業機械與木工設備,2010,11:14-18.
[2]雷聲,陳大競,陳裕泉,等.基于MWCNTs/Nafion復合膜的高性能聲表面波濕敏傳感器研究[J].傳感技術學報,2011,24(6):813-817.
[3]郭珂君,彭斌,張萬里.一種聲表面波無線傳感器的小型化微帶天線[J].傳感技術學報,2013,26(10):1453-1456.
[4]陳忠安,王靜.材料力學[M].北京:北京大學出版社,2009.
[5]申麗娟,程光輝,耿艷玲,等.60Si2Mn彈簧鋼失效機理分析[J].熱加工工藝,2013,14:192-193.
[6]Bhasker R V,Harpreet S,Nimalb A T.Origin and Role of Elasticity in the Enhanced DMMP Detection by ZnO/SAW Sensor[J].Sen?sors and Actuators B:Chemical,Volume 207,Part A,February,2015:375-382.
[7]Chen Haosen,Wei Weiyi,Liu Jinxi,et al.Dynamic Conducting Crack Propagation in Piezoelectric Materials:Mode-II Problem[J].Science China(Technological Sciences),2015(5):769-774.
[8]Yu Jing,Guo Junhong,Pan Ernian,et al.General Solutions of Plane Problem in One-Dimensional Quasicrystal Piezoelectric Ma?terials and Its Application on Fracture Mechanics[J].Applied Mathematics and Mechanics(English Edition),2015(6):793-814.
[9]Du Yanliang,Liu Shuhong,Duan Shijie,et al.Electro-Elastic Fields of Piezoelectric Materials with An Elliptic Hole under Uni?form Internal Shearing Forces[J].Chinese Journal of Mechanical Engineering,2013(3):454-461.
[10]潘峰.聲表面波材料與器件[M].北京:科學出版社,2012.
[11]阮鵬,陳智軍,付大豐,等.基于COMSOL的聲表面波器件仿真[J].測試技術學報,2012(5):422-428.
[12]何鵬舉,張朋,陳明,等.聲表面波網絡傳感器及其在國防工業中的應用[M].西安:西北工業大學出版社,2011.
[13]胡德福.應變式扭矩傳感器的設計技術[J].船舶工程,2011(4):96-99.
[14]任姝.聲表面波扭矩傳感器結構設計及信號提取方法研究[D].上海:上海交通大學,2013.
[15]徐繼輝.應用于船舶傳動軸扭矩檢測的聲表面波傳感器設計[D].上海:上海交通大學,2013.

李志鵬(196-),男,東北林業大學交通學院,教授,博士生導師。研究方向為汽車電子控制技術,13946124010@163.com;

李曉英(1991-),女,碩士生。東北林業大學交通學院,載運工具運用工程,研究方向為汽車轉向扭矩的測量研究,2014672300@qq.com。
Research on the Measurement of Vehicle Steering Torque Based on SAW Principle*
LI Zhipeng*,LI Xiaoying
(Traffic College Northeast Forestry University,Haerbin 150040,China)
According to the faults including susceptible to noise,short service life,complex structure and the diffi?culty of power supply of Electric power steering system[1],based on surface acoustic wave principle to measure the Steering torque,that can realize the EPS System of light-duty and digital further.Based on COMSOL software power?ful physical analysis,the main shaft and piezoelectric substrate have got a theory and simulation research,and make statistics and analysis on the results of simulation based on Matlab software,the validation of the proposed scheme can be implemented according that.
Physical sensor;Steering torque;Surface acoustic wave;COMSOL;Matlab
TM571.2
A
1004-1699(2016)05-0764-05
項目來源:黑龍江省科學技術基金項目(E050301)
2015-08-28修改日期:2016-01-18
猜你喜歡
電子器件(2021年4期)2021-10-26 12:27:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年8期)2018-11-25 07:42:16
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電子工業專用設備(2016年8期)2016-08-24 09:39:59
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04