基于自適應神經模糊推理系統的刀具磨損監測
2016-10-20 10:26:16朱永猛吳超勇蘇永衡
兵器裝備工程學報 2016年9期
朱永猛,吳 軍,吳超勇,蘇永衡
(華中科技大學 船舶與海洋工程學院,武漢 430074)
?
【機械制造與檢測技術】
基于自適應神經模糊推理系統的刀具磨損監測
朱永猛,吳軍,吳超勇,蘇永衡
(華中科技大學 船舶與海洋工程學院,武漢430074)
為精確地監測高速銑床刀具在加工過程中的刀具磨損量,通過采集高速銑床加工過程中的振動信號、電流信號和噪聲信號,經數據預處理與數據融合,建立基于自適應神經模糊推理系統的刀具磨損過程變化模型,實現在高速銑床不停機的前提下對銑床刀具進行狀態監控。實驗結果顯示:針對銑床刀具磨損量的監測平均準確率為95.21%,最大監測準確率為99.74%。這表明文中所采用的方法具有較高的可行性。
銑床;刀具磨損監測;ANFIS
高速銑床作為一種較為先進的智能制造裝備,在加工過程中,刀具加工工件,產生磨損,影響最后的成品品質。刀具的磨損受到科研人員的極大關注,曾嘗試用各種不同的方法監測刀具的磨損。
1 國內外研究現狀
早期的科研人員利用單一傳感器采集到的信號數據,如噪聲信號[1]、振動信號[2]和切削力信號[3],進行刀具的狀態監控(toolconditionmonitoring,TCM)。伴隨著科學技術的不斷發展,一些通過建立刀具磨損動力學模型進行刀具磨損量監測的方法,顯示了廣闊的適用性。對于模型的建立,一般有2種:① 假設可以完全通過數學模型描述刀具磨損過程中所有的物理規律,基于這種假設提出“白盒子”方法[4];② 假設刀具磨損過程為不可知,也沒有任何的先驗知識,但可以通過采集數據獲得未知模型的輸入、輸出關系,實現對未知過程的認知,這樣的方法稱為“黑盒子”方法。“黑盒子”方法最大的優點,是可以在不需要對磨損過程中的物理意義有任何了解的前提下,通過采集準確的實驗過程數據,進行磨損過程模型的搭建[5],最大的缺點是對磨損過程中物理意義的認知缺乏。實際應用過程中,最好是將2種方法進行融合,得到“灰盒子”方法[6]。但是,在復雜的工況下,難以采集準確的過程數據,以及缺乏經驗知識,都對刀具磨損過程的動力學模型正確搭建造成不良影響。
Jang于1991年提出了基于模糊神經網絡的自適應模糊推理,1993年又撰文將之前提出的算法稱為自適應神經模糊推理系統(adaptivenetwork-basedfuzzyinferencesystem,ANFIS)。模糊推理系統使得顯性知識更加詳盡和精確,神經網絡通過學習算法建立數學模型解釋隱性知識,這使得模糊神經網絡的優勢更加凸顯,這也是模糊神經網絡被廣泛應用到刀具磨損量監測領域的原因。ChenSL等人則利用多個傳感器數據,如振動信號和切削力信號,提出新的數據融合算法,結合ANFIS進行刀具磨損狀態的監測[7];UrosZ等人利用切削力信號,對比了三角形隸屬度函數和梯形隸屬度函數應用到ANFIS中的刀具磨損量監測結果[8];GillSS等人利用經過低溫處理的M2高速鋼車刀在加工過程中的切削速度、工作時間和低溫浸泡均熱溫度等參數,結合ANFIS進行刀具磨損量的監測[9];RizalM等人利用刀具切削速度、切削深度、進給速率和融合系數等參數,結合ANFIS進行刀具磨損量的監測[10]。
本文利用高速銑床加工過程中的主軸和工作臺振動信號、主軸直流電流和交流電流信號、主軸與工作臺噪聲信號,結合自適應神經模糊推理系統ANFIS,實現對刀具磨損量的監測。實現過程中,首先對傳感器信號進行預處理和特征融合,再經過Takagi-Sugeno模糊推理進行模糊規則劃分和隸屬度函數的計算,最后利用神經網絡訓練模型,實現刀具磨損量監測。
2 基于ANFIS的刀具磨損監測模型
ANFIS模型如圖1,等價于Takagi-Sugeno模糊推理與人工神經網絡相結合的結構模型。為了更方便介紹ANFIS模型,設特征參數集{x1…xi…xn},i=2,3,…,n-1作為模型輸入量, f作為模型輸出值,系統模型中包含如下模糊規則:
記Ok(k=1,2,3,4,5)表示第k層的某個節點輸出。每一層的功能及意義介紹如下:
Layer1:模糊化層。每個節點代表一個語言變量值,它的作用是計算每個輸入分量屬于各語言變量值模糊集合的隸屬度函數,若隸屬度函數采用高斯函數表示的鈴型函數,則:
(1)
式中,aj和cj分別表示隸屬度中心的作用半徑和隸屬度函數的中心。
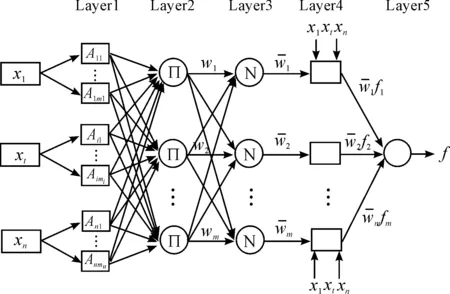
圖1 基于Takagi-Sugeno模糊推理的ANFIS網絡
Layer 2:計算規則使用度。每個節點代表一條模糊規則,它的作用是用來匹配模糊規則的前件,每一個節點的輸出是所有輸入信號的乘積,計算出每個規則的適用度,則:
(2)
式中,j1={1,2,…,m1},ji={1,2,…,mi},…,jn={1,2,…,mn},i={2,…,n-1},mi(mi=1,2,…)為第i個特征參數的聚類簇的個數。
Layer 3:歸一化適用度。計算第l個節點的規則適用度與所有規則適用度之和的比值:
(3)
Layer 4:Takagi-Sugeno輸出。計算每條模糊規則的輸出:

(4)

Layer 5:總輸出。計算所有傳遞過來的信號之和作為總輸出,總輸出為:
(5)
由以上分析和定義可得一個與基于Takagi-Sugeno模糊模型的神經網絡相等價的ANFIS模型。在實際應用中,可以合并不同的分層構建不同的ANFIS模型。
3 實例分析
本研究采用一個實際的銑床監測數據集[11],數據集包含16組刀具全壽命周期,共167個運行次數的銑床刀具磨損實驗數據。文中選擇第13組刀具全壽命周期數據實現刀具磨損量監測算法。在刀具正常運行過程中,傳感器每次采集數據可得到9 000個數據點,去空值和去奇異點后,繪制主軸直流電流信號如圖2。
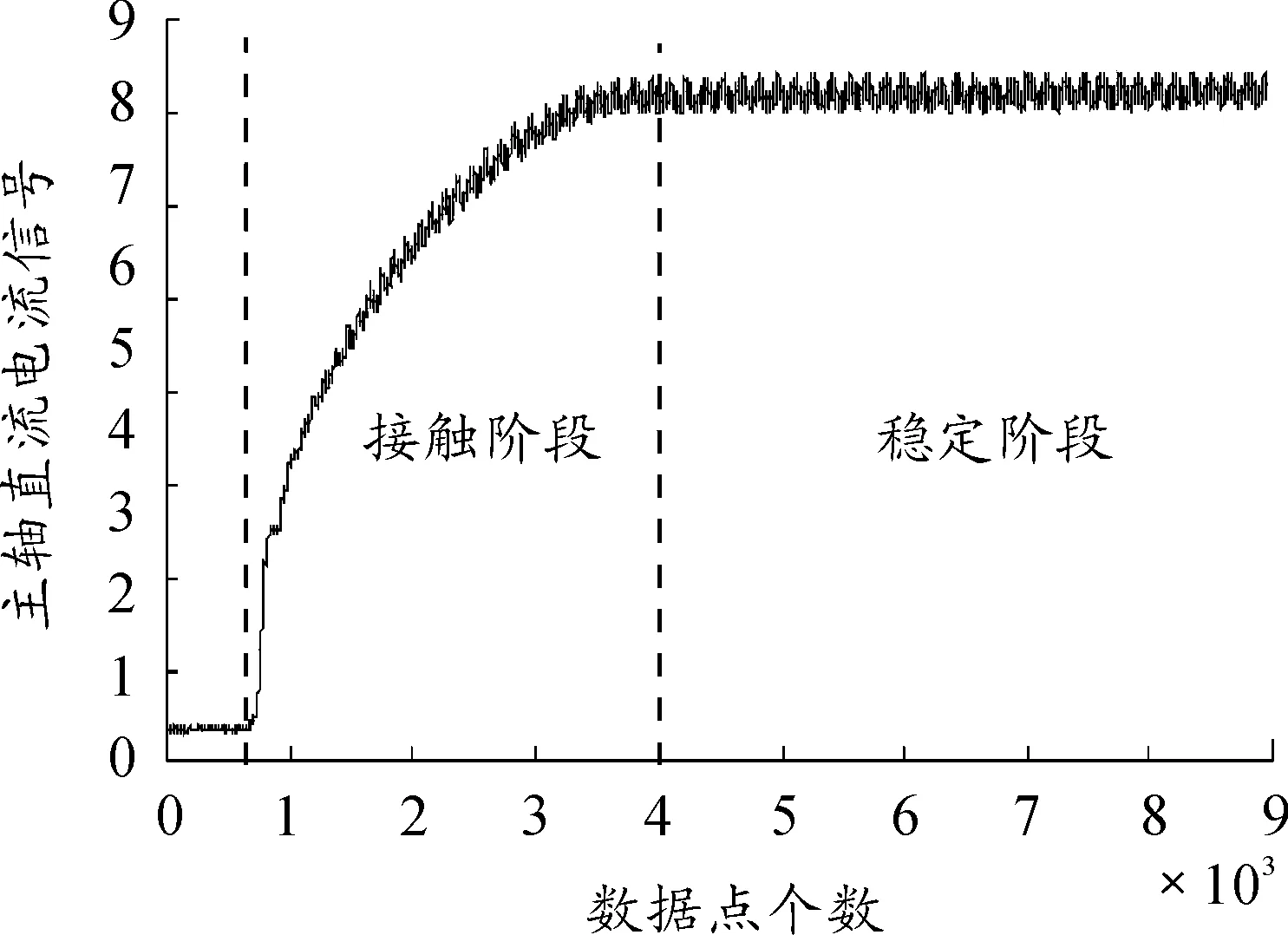
圖2 主軸直流電流信號
從圖2中曲線可以發現,信號數據有很明顯的階段性特征,包括空轉階段、接觸階段和穩定階段。為了使實驗過程更具代表性、監測結果更具準確性,本文選取第4 500個點后的穩定階段的信號作為原始數據。提取均值、均方差、方根幅值、均方根、最大值、偏斜度、峭度、峰值因子和裕度因子9種時域特征參數,并歸一化。
針對不同傳感器計算得到的時域特征,利用式(6)進行相關性分析,式中,X表示時域特征參數,Y表示刀具磨損量,Cov(X,Y)為X和Y的協方差,D(X)為X的方差,D(Y)為Y的方差。
(6)
利用式(7)進行殘差分析,式中,S1(x)和S2(x)是根據特征值點擬合的曲線,N為數據點個數。結果如表1、表2。表1中NaN表示非數字,即Not a Number,當分母為0時,計算結果為NaN。首先,保留皮爾遜相關系數大于0.8的強相關特征參數。其次,在保留下來的特征參數中,選取殘差值最小[12]的特征參數組成最終的特征參數集,獲得的特征參數集為:主軸噪聲信號的方根幅值、工作臺噪聲信號的均方差、主軸交流電流信號的最大值和主軸直流電流信號的均方根。
(7)
在實驗獲得的第13組的13個數據點中,選擇8個數據點作為訓練數據,5個數據點作為校驗數據,同種工況下采集的4個數據點作為驗證數據。將融合得到的特征參數集輸入到ANFIS網絡進行刀具磨損量監測,結果如表3所示。
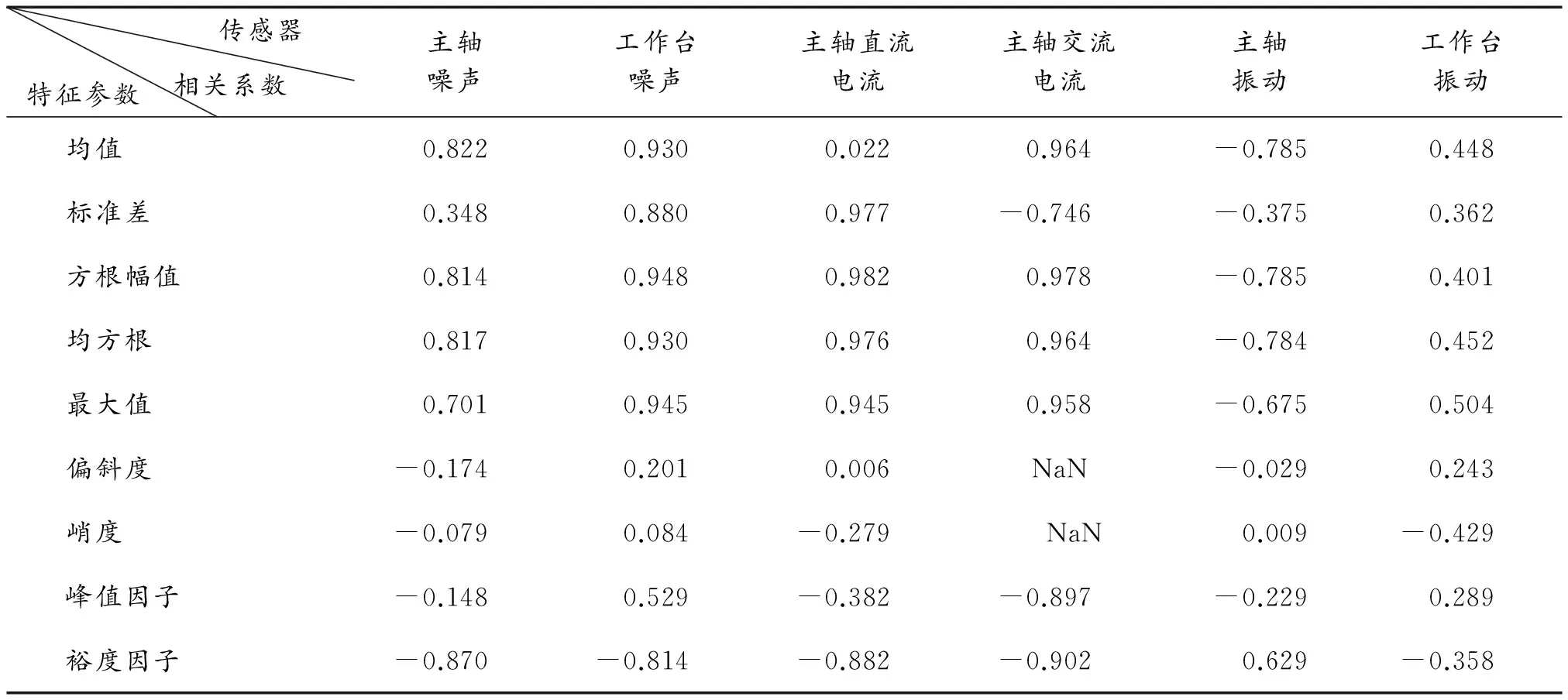
表1 各時域特征與磨損量的皮爾遜相關系數

表2 各時域特征自身間的殘差值

表3 實際值與模型監測值的結果對比
4 結束語
銑床刀具作為工業生產中與被加工件直接接觸的部分,刀具的磨損會直接影響被加工件的成品品質,降低企業的經濟收益。本研究提出的刀具磨損監測方法,可以在銑床正常運行過程中進行刀具磨損監測,為企業提供刀具更換與維修的依據。
[1]HAYASHI S R,THOMAS C E,WILDES D G,et al.Tool Break Detection by Monitoring Ultrasonic Vibrations[J].CIRP Annals-Manufacturing Technology,1988,37(1):61-64.
[2]TARNG Y S.Measurement of quasi-mean resultant force using the vibrational signal of spindle in milling[J].International Journal of Machine Tools & Manufacture,1991,31(3):295-304.
[3]ALTINTAS Y,YELLOWLEY I.In-Process Detection of Tool Failure in Milling Using Cutting Force Models[J].Journal of Engineering for Industry,1989,111(2):149-157.
[4]LJUNG L.System identification:Theory for the user.Upper Saddle River:Prentice-Hall,1999.
[5]SJ?BERG J,ZHANG Q,LJUNG L,et al.Nonlinear black-box modeling in system identification:a unified overview[J].Automatica,1995,31(95):1691-1724.
[6]BOHLIN T.A case study of grey box identification[J].Automatica,1994,30(94):307-318.
[7]CHEN S L,JEN Y W.Data fusion neural network for tool condition monitoring in CNC milling machining[J].International Journal of Machine Tools & Manufacture,2000,40(3):381-400.
[8]UROS Z,FRANC C,EDI K.Adaptive network based inference system for estimation of flank wear in end-milling[J].Journal of Materials Processing Technology,2009,209(3):1504-1511.
[9]GILLSS,SINGHR,SINGHJ,etal.Adaptiveneuro-fuzzyinferencesystemmodelingofcryogenicallytreatedAISIM2HSSturningtoolforestimationofflankwear[J].ExpertSystemswithApplications,2012,39(4):4171-4180.
[10]RIZALM,GHANIJA,NUAWIMZ,etal.Onlinetoolwearpredictionsystemintheturningprocessusinganadaptiveneuro-fuzzyinferencesystem[J].AppliedSoftComputing,2013,13(4):1960-1968.
[11]AGOGINOA,GOEBELK.MillDataSet[EB/OL].BESTlab,UCBerkeley,NASAAmesPrognosticsDataRepository,http://ti.arc.nasa.gov/project/prognostic-data-repository,NASAAmes,MoffettField,CA,2007.
[12]李斌,劉紅奇,毛新勇,等.一種數控機床銑削加工刀具破損監測方法[P].中國專利:CN103324139A,2013-09-25.
[13]柯曉龍,黃海濱,劉建春. 基于精密磨削的振動監測技術研究與應用[J].重慶理工大學學報(自然科學),2013(12):77-81.
(責任編輯唐定國)
ResearchonMethodofToolWearMonitoringBasedonANFIS
ZHUYong-meng,WUJun,WUChao-yong,SUYong-heng
(SchoolofNavalArchitectureandOceanEngineering,HuazhongUniversityofScienceandTechnology,Wuhan430074,China)
Inordertomonitorthetoolwearofamillingmachineaccurately,thesignalsoftableandspindlevibration,thesignalsofspindleACandDCcurrent,andthesignalsoftableandspindleacousticemissionwerecollectedtoestablishamodelofthetoolwearprocessvariationsbasingonANFIS.Atlast,theestablishedmodelwillbeusedtomonitorthemillingmachinetoolwearwithoutthemachinestoprunning.Accordingtotheoutputofthemodel,theaveragemonitoringaccuracyis95.21%,andthehighestmonitoringaccuracyisupto99.74%,whichmeansthemethodofthepaperproposedhasahighfeasibility.
millingmachine;toolwearmonitoring;ANFIS
2016-05-13;
2016-05-28
國家自然科學基金面上項目(51475189);中央高校基本科研業務費專項資金資助(2016YXMS050)
朱永猛(1990—),男,碩士,主要從事裝備故障檢測與剩余壽命研究。
10.11809/scbgxb2016.09.027
format:ZHUYong-meng,WUJun,WUChao-yong,etal.ResearchonMethodofToolWearMonitoringBasedonANFIS[J].JournalofOrdnanceEquipmentEngineering,2016(9):115-118.
TG501
A
2096-2304(2016)09-0115-05
本文引用格式:朱永猛,吳軍,吳超勇,等.基于自適應神經模糊推理系統的刀具磨損監測[J].兵器裝備工程學報,2016(9):115-118.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
