輪式移動仿人護理機器人運動穩定性分析
2016-10-10 05:05:08贠今天鄧利浩桑宏強
中國機械工程 2016年17期
贠今天 鄧利浩 桑宏強
1.天津市現代機電裝備技術重點實驗室,天津,300387 2.天津工業大學,天津,300387
?
輪式移動仿人護理機器人運動穩定性分析
贠今天1,2鄧利浩1,2桑宏強1,2
1.天津市現代機電裝備技術重點實驗室,天津,3003872.天津工業大學,天津,300387
針對護理機器人腰臂配合抱起病人時容易發生傾翻和側滑的問題,以自主研發的全方位移動仿人護理機器人為研究對象,從靜態和動態兩個方面研究機器人此階段的運動穩定性。在沒有負載或低速運動工況下,利用重心投影法,分析其靜態穩定性;在有負載變化情況下,利用零力矩點理論并結合遞歸牛頓-歐拉算法,分析其動態穩定性。最后運用ADAMS仿真軟件對護理機器人運動過程進行仿真分析,為確保護理機器人的運動穩定性提供理論依據。
護理機器人;運動穩定性;重心投影法;零力矩點;遞歸牛頓-歐拉算法
0 引言
近年來隨著環境的不斷惡化,疫情爆發的概率及規模明顯增大。應對疫情過程中,醫護人員需要接觸感染了傳染疾病的患者,易受感染[1]。社會老齡化和高齡化程度不斷加深,根據國家統計局《2014年國民經濟和社會發展統計公報》,2014年中國13.67億人口中,60歲及以上的老人2.12億人,占總人口比例為15.5%,由此帶來的護理任務越來越繁重,因此代替或輔助醫護人員對病人進行護理的機器人成為目前機器人研究的熱點[2-3]。另外,在護理工作中,病人的轉移是一個最耗體力的任務,尤其在醫護人員短缺的情況下形勢更加嚴峻。為加強醫務人員的防護和彌補護理人員的短缺,科研人員針對護理機器人輔助醫護人員對病人進行護理這一課題做了大量的研究工作,并取得了一定成果。國內的研究中,沈陽自動化研究所對研發的三點支撐的輪式仿人機器人采用零力矩點(zero moment point,ZMP)理論分析穩定性,但其分析只考慮了零負載工況[4-5];澳門大學機器人實驗室對輪式移動仿人機器人作了穩定性研究,但只是側重于靜態穩定性分析[6]。這些研究都沒有分析機器人與病人接觸過程中的穩定性。國外的研究中,橫濱大學通過在足底安裝傳感器測得機器人受到的來自接觸面的反作用力,從而獲得ZMP位置信息[7],但該方法并不適用于麥克納姆輪;日本RTC實驗室研發了能夠抱起病人的RIBA 機器人,并作了碰撞穩定性相關研究[8-9]。然而當前對護理機器人進行運動穩定性分析時,很少考慮與病人接觸前后外載荷變化的影響,采用的穩定性判據較為單一,不能真實反映護理機器人運動穩定情況。
護理機器人抱起病人的整個運動過程中,最不穩定的階段就是護理機器人在移動平臺靜止時腰臂配合抱起/放下病人,此階段很容易發生傾翻危險。本文主要針對這一階段,分析護理機器人在有無負載不同工況下的運動穩定性,并提出相關穩定性判定依據。
1 護理機器人的機械結構特點
護理機器人工作面向對象是人,故不同于一般的工業機器人,其最大的特點在于人機接口的柔順性和工作安全穩定性,護理機器人要求運行平穩、回轉半徑小,有足夠的力將目標抱起或托起,適應家庭和病房等非結構護理環境。
為滿足上述要求,我們設計了全方位移動仿人護理機器人,此機器人高1.35 m,由麥克納姆輪(4個)、移動平臺、腰部、軀干、雙臂、靈巧手等部分組成,其機械結構如圖1所示。護理機器人是一個多自由度、非線性復雜剛柔混合多體系統,共有15個自由度,包括整體縱向移動、橫向移動和回轉3個自由度、腰部1個俯仰自由度,頭頸部1個回轉自由度,每條手臂有5個自由度(包括肩部2個自由度、肘部1個自由度、腕部2個自由度)。
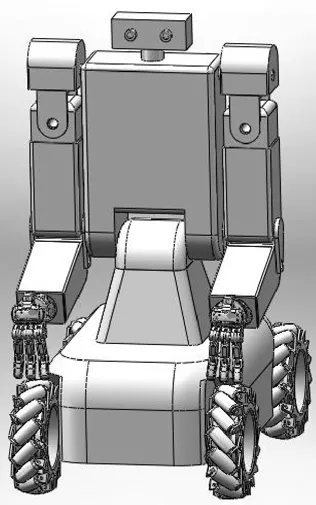
圖1 機器人結構簡圖
護理機器人雙臂與移動基座的配合,可極大拓展其操作范圍。寬大的機械臂結構與病人有較大的接觸面積,能平穩地抱起病人并將其放入輪椅或實現病人在病床與病床之間的平穩轉移,防止病人皮膚二次損傷和身體跌落的危險。采用麥克納姆輪的移動平臺具有全向移動能力,非常適合在病房轉運空間有限、病床與病床之間通道狹窄的環境工作,具有非常靈活的運動能力及很強的適應性,在提高病人轉移效率、增加病房有限空間利用率以及降低醫護成本等方面具有明顯的效果。
2 護理機器人穩定性分析
全方位移動仿人護理機器人在非結構復雜環境下工作,需要考慮多種不確定性因素,如各構件間的關節摩擦干擾、運動路況、外載荷變化、慣性力、外界環境干擾等,這些因素都影響著護理機器人的運動穩定性。然而當前在對護理機器人進行運動穩定性分析時,面對不同的運動工況,對影響其穩定性的因素考慮得不夠全面,采用的穩定性判據較為單一,得到的結果一般較為片面,與實際情況有較大的出入。因此,在對護理機器人的運動穩定性進行分析時,要全面綜合考慮影響其穩定性的因素,根據不同的工況采用相應的一種或多種方法相結合的穩定性判據,從而盡可能地獲得貼近實際情況的結果。本文重點對護理機器人的靜態和動態穩定性兩方面進行分析研究,根據不同的工況提出相應的穩定性判據。
針對護理機器人在移動平臺靜止時腰臂配合抱取目標物(如老年人或病人)這一任務階段,為方便護理機器人的運動學和動力學分析,可以考慮簡化模型,忽略相對作用和慣量較小的頭頸部和腕部關節,利用D-H法運動學建模[10],以移動平臺中心為坐標系的原點,建立機器人D-H坐標系,如圖2所示。由圖2可以看出其復雜的樹形結構,左右嚴格對稱,以右臂為例,其連桿參數如表1所示。其中,ai(i=1,2,3,4)為沿著xi-1軸從zi-1軸到zi軸的距離;αi為繞著xi-1軸從zi-1軸到zi軸的距離的角度;di為沿著zi軸從xi-1軸到xi軸的距離;θi為繞著zi軸從xi-1軸到xi軸的角度;q1代表腰部關節;q2代表右臂肩部旋轉關節;q3代表右臂肩部擺動關節;q4代表右臂肘部關節; HL代表右臂腕部關節。
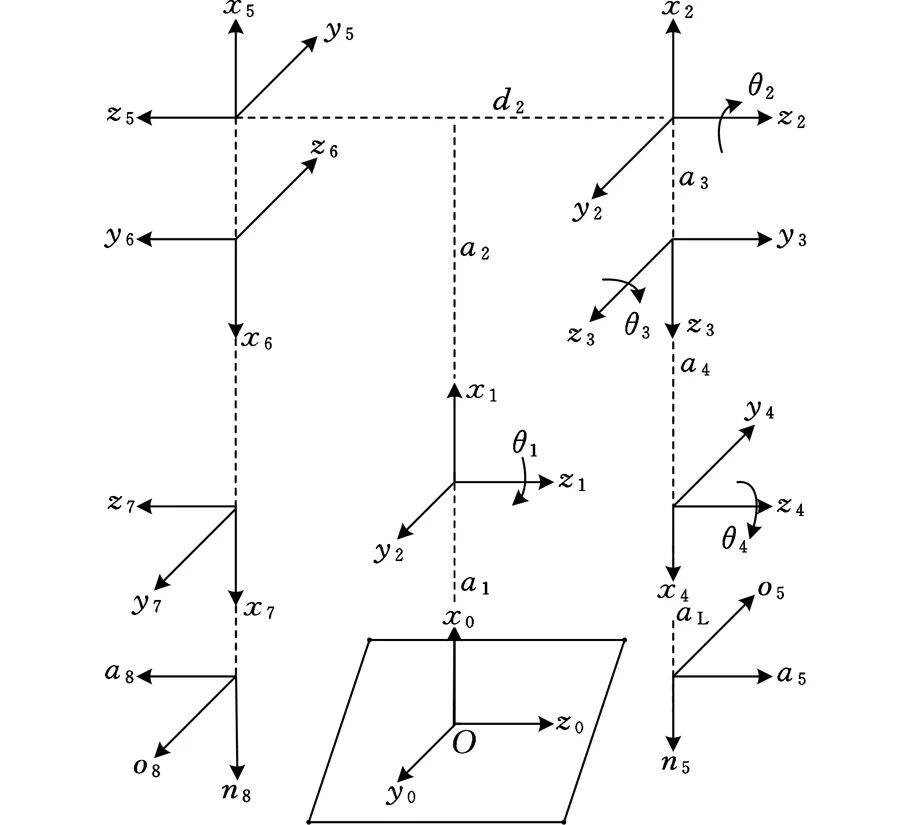
圖2 機器人D-H坐標系

關節αi(rad)ai(m)θi(rad)di(m)q100.51200q200.45600.26q3-π/2-0.13-π0q4-π/20.38300HL00.29800
2.1零負載工況下護理機器人穩定性分析
本文研究的護理機器人工況設定在路面相對平整的醫院環境下,由于工作對象為病人,為防止對病人產生二次傷害,要求護理機器人各關節運動平緩穩定。護理機器人在零負載和低速狀態下,其動態穩定性問題可以看成各個時刻的靜態穩定性問題。穩定的支撐是獲得理想運動的重要條件,當機器人系統的重心在水平方向投影位于穩定區域內時,機器人即處于穩定狀態,穩定區域即機器人各輪與地面的接觸點構成的凸多邊形在水平方向上的投影。機器人的質心(xc,yc,zc)的各分量為:
(1)

將設計的護理機器人三維模型采用 Parasolid 文件格式導入ADAMS虛擬仿真軟件,末端不施加作用力,定義剛體屬性、添加約束,然后對其進行運動仿真分析。
各關節驅動STEP函數如下:
腰部關節:STEP(time,0,0d,8,40d)+STEP(Time,8,0d,18,-40d)+STEP(time,18,0d,28,40d)+STEP(time,28,0d,36,-40d);
右肩關節:STEP(time,0,0d,6,-70d)+STEP(time,6,0d,10,0d)+STEP(time,10,0d,18,30d)+STEP(tIme,18,0d,28,-30d)+STEP(time,30,0d,36,70d);
左肩關節:STEP(time,0,0d,8,50d)+STEP(time,8,0d,10,0d)+STEP(time,10,0d,18,-30d)+STEP(time,18,0d,28,30d )+STEP(time,28,0d,36,-50d);右擺件關節:STEP(time,0,0d,8,-8d)+STEP(time,8,0d,28,0d)+STEP(time,28,0d,36,8d);
左擺件關節:STEP(time,0,0d,60,0d);
右肘部關節:STEP(time,0,0d,8,-20d)+STEP(time,8,0d,18,5d)+STEP(time,18,0d,28,-5d)+STEP(time,28,0d,36,15d);
左肘部關節:STEP(time,0,0d,8,13d)+STEP(time,8,0d,28,0d)+STEP(time,28,0d,36,-16d);
運動仿真時間36 s,步長0.06 s,仿真過程如圖3所示。
在護理機器人接觸病人之前,其機械臂末端沒有負載,各構件運動平緩,圖4和圖5分別為各構件質心在Z軸和Y軸方向上的軌跡,根據重心投影法穩定判據,將質心軌跡代入式(1)可得到護理機器人機械系統整體重心的軌跡,由圖6和圖7可以看出機械系統整體重心軌跡在Z軸、Y軸方向上的值一直在機器人各輪與地面的接觸點構成的穩定區域(長680 mm,寬510 mm的矩形)內,故護理機器人處于靜態穩定狀態。
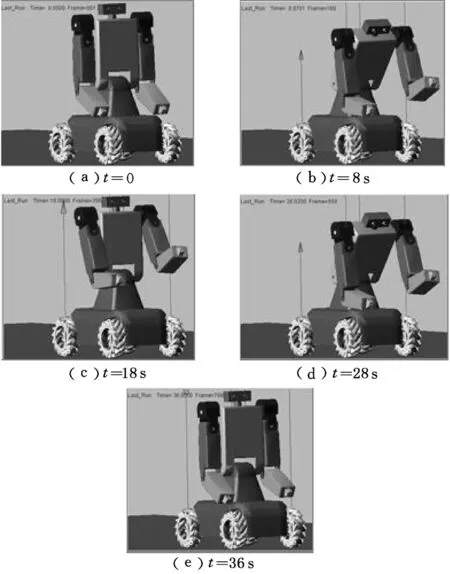
圖3 護理機器人仿真流程圖
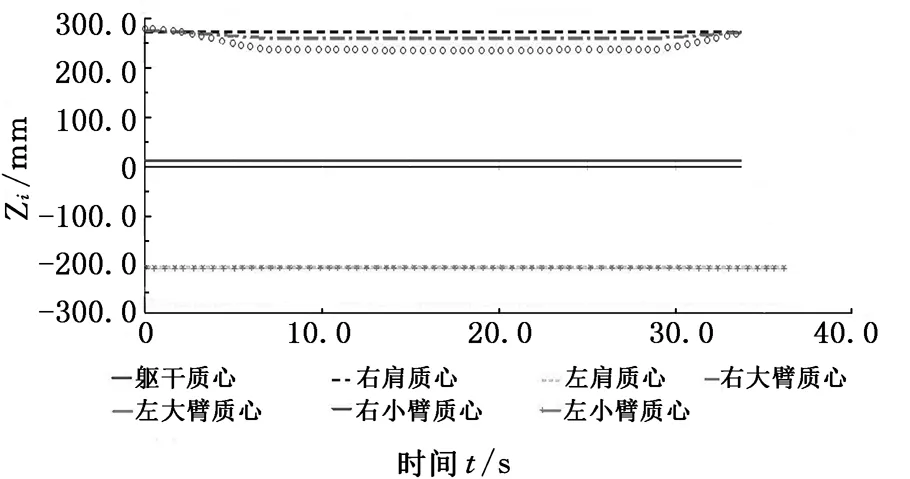
圖4 各構件質心在z軸方向上的軌跡
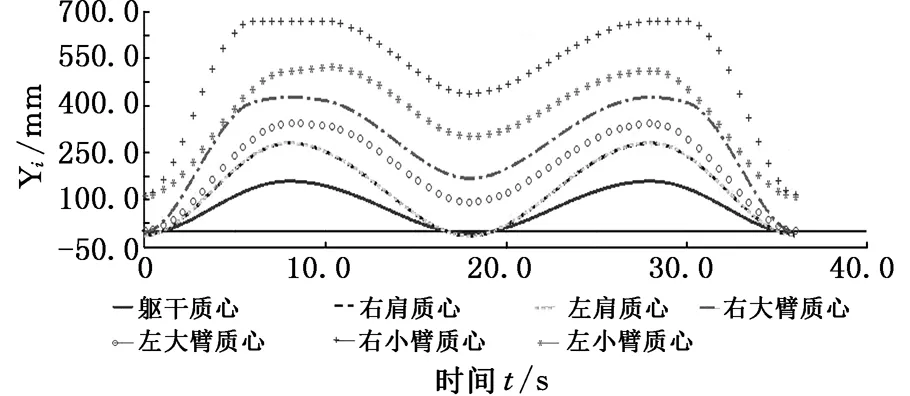
圖5 各構件質心在y軸方向上的軌跡
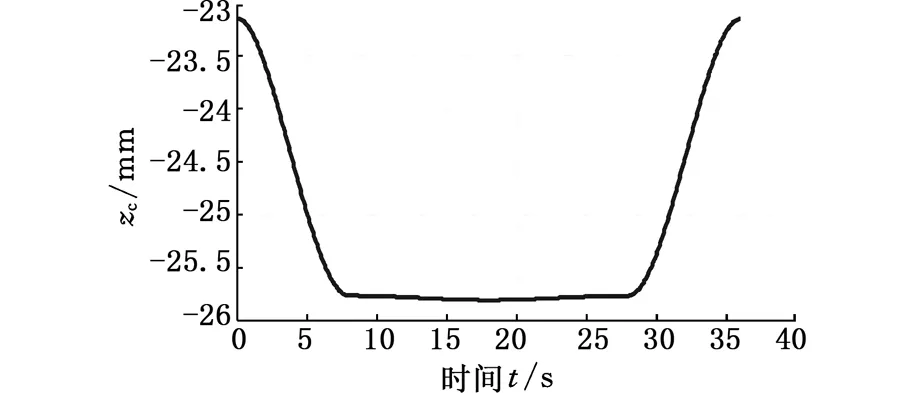
圖6 護理機器人重心在z軸方向上的軌跡
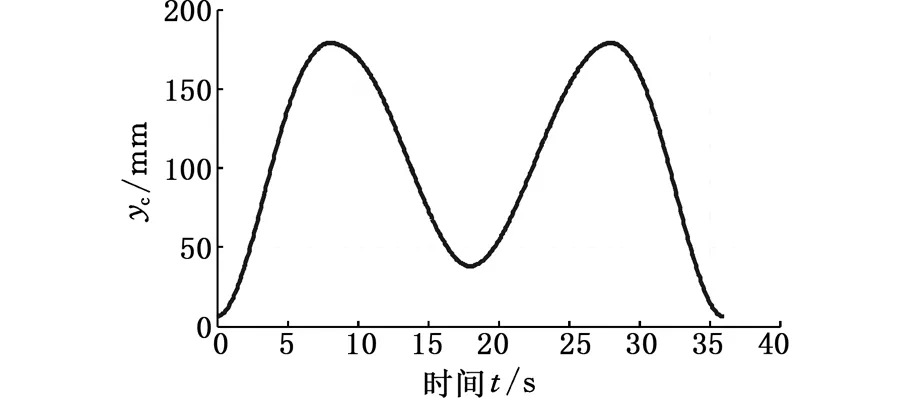
圖7 護理機器人重心在y軸方向上的軌跡
2.2有負載情況下護理機器人穩定性分析
當護理機器人雙臂末端施加負載時,重心投影法已不再適用此情況。為真實反映護理機器人的運動情況,本文采用ZMP理論[11], 只要ZMP位于輪子與地面接觸點形成的支撐多邊形(穩定區域)內,護理機器人即處于動態穩定。由ZMP理論可以得到關于路面上任一點P的力矩平衡式如下:
(2)

由式(2)可以看出,傳統的ZMP建模中各參數是以絕對坐標系為基準的,計算量大且非常復雜,不利于實時計算調整各關節位姿狀態,為此將遞推牛頓-歐拉算法與傳統ZMP算法相結合,采用迭代的方式計算ZMP,方便編程計算。
遞推牛頓-歐拉算法如下:
(1)向外遞推計算構件速度、加速度(i:0→n-1)。
(2)向內遞推計算力、力矩(i:n→1)。
旋轉矩陣
迭代初始條件
首先,根據護理機器人不同運動情況來設定迭代初始條件,利用上述遞推公式求得護理機器人雙臂分別施加到軀干上的力和力矩,再根據護理機器人軀干受力動態平衡求出移動平臺(底座)受到的上一構件的力。此方法和靜力內推方法的不同之處在于,此方法考慮了機構運動過程中產生的慣性力和力矩,更加真實反映了機構受力情況,移動平臺受力如圖8所示。

圖8 移動平臺受力分析
由此可得求解護理機器人ZMP(xZMP、yZMP、zZMP)的簡化計算公式為
(3)
考慮到護理機器人在類似于醫院的復雜非結構環境下工作,受到各種不確定因素的影響,設計中應該留出一定的安全余量,確保護理機器人在運動過程中時刻保持動態穩定性。護理機器人的4個麥克納姆輪與地面的接觸點圍成一個矩形,以矩形中心為原點,以原點到矩形輪廓邊界的最小距離r0為半徑的圓,此區域我們定義為有效穩定安全區域。護理機器人在運動過程中,若護理機器人系統的ZMP位于有效穩定安全區域內,則護理機器人處于動態穩定,若處于有效穩定安全區域外,則無法保證其是否處于穩定狀態,需要調整各構件的運動參數來使系統的ZMP處于穩定有效區域內,判定公式為
(4)
模擬護理機器人抱起體重80kg的人,為方便研究將人體假設為剛體,同樣將護理機器人以及人體模型導入ADAMS虛擬仿真軟件,如圖9所示,定義剛體屬性、添加約束、接觸參數等,采用STEP驅動函數與零負載工況設定相同。
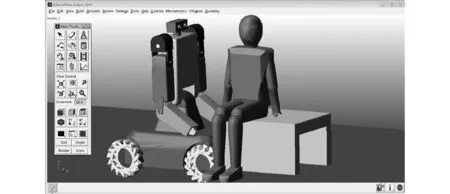
圖9 ADAMS仿真初始位置
運動仿真時間36s,步長0.06,仿真過程如圖10所示。

圖10 護理機器人仿真流程圖


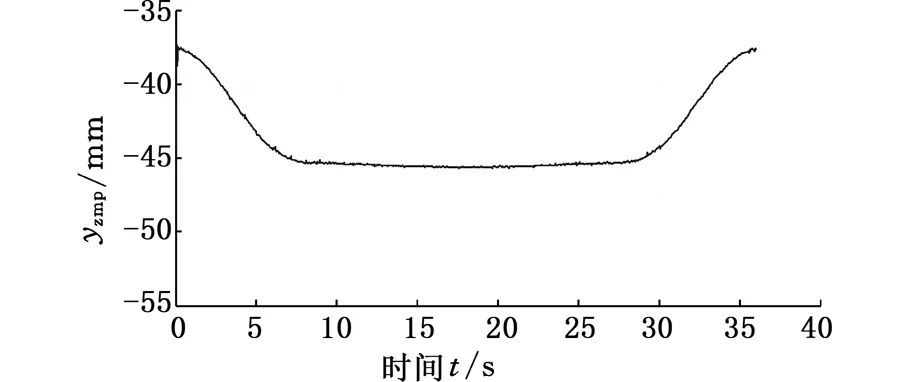
圖11 ZMP在y軸方向上的軌跡
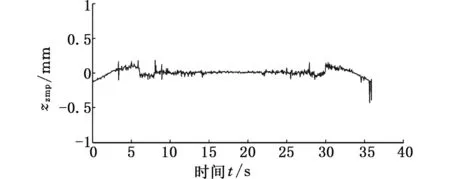
圖12 ZMP在z軸方向上的軌跡
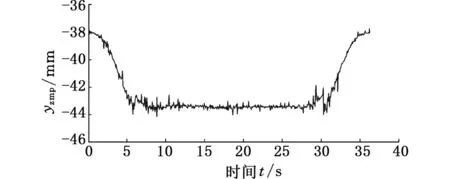
圖13 ZMP在y軸方向上的軌跡

圖14 ZMP在z軸方向上的軌跡
3 結語
本文針對有負載和無負載的不同工況,采用相應的穩定判定依據,從靜態和動態兩方面分析了護理機器人的穩定性,并利用ADAMS仿真軟件模擬護理機器人的運動情況,分析護理機器人的穩定性,并提出相關穩定性判定依據,為分析護理機器人的結構合理性和驗證其方案可行性提供了相關理論依據。在非結構環境下,由于受環境的不確定性和運動復雜性等因素的影響,護理機器人在某個運動瞬間極易產生突變,嚴重影響系統的穩定性,因此,非線性系統中的自身擾動和外部干擾對護理機器人穩定性影響將是以后研究的重點方向。
[1]郭新,安軍防,黃詠梅.戰場傷員轉運擔架的研究進展[J]. 醫療衛生裝備, 2010,31(11): 40-41.
GuoXin,AnJunfang,HuangYongmei.ResearchProgressofBattlefieldTransferLitterforWounded[J].ChineseMedicalEquipment, 2010, 31(11): 40-41.
[2]嵇鵬程,沈惠平. 服務機器人的現狀及其發展趨勢[J]. 常州大學學報(自然科學版), 2010,22(2):73-78.
JiPengcheng,ShenHuiping.CurrentSituationandDevelopmentTrendofServiceRobot[J].JournalofChangzhouUniversity(NaturalScienceEdition), 2010,22(2):73-78.
[3]黃敦華,李勇,陳容紅. 醫療服務機器人應用與發展研究報告[J]. 機電產品開發與創新,2014,27(03):6-8.
HuangDunhua,LiYong,ChenRonghong.TheApplicationsandDevelopmentReportofMedicalServiceRobot[J].Development&InnovationofMachinery&ElectricalProducts, 2014,27(3):6-8.
[4]李艷杰,鐘華. 輪式仿人機器人的ZMP建模及動態穩定判據[J]. 沈陽理工大學學報, 2009,28(1):79-84.
LiYanjie,ZhongHua.TheZMPModelingandtheDynamicStabilityCriterionoftheWheelBasedHumanoidRobot[J].TransactionsofShenyangLigongUniversity, 2009,28(1):79-84.
[5]李艷杰,吳鎮煒,鐘華. 一種基于反作用力的仿人機器人ZMP建模與測量[J]. 儀器儀表學報,2006, (S2):1094 - 1096.
LiYanjie,WuZhenwei,ZhongHua.MedelingandMeasurementofZMPofaHumanoidRobotBasedonReaetion[J].ChineseJournalofScientificInstrument, 2006, (S2):1094-1096.
[6]WangJingguo,LYangmin.StaticForceAnalysisforaMobileHumanoidRobotMovingonaSlope[C]//IEEEInt.Conf.onRoboticsandBiomim-etics.Bangkok,Thailand, 2009:371-376.
[7]ErbaturK,OkazakiA.AStudyontheZeroMomentPointMeasurementforBipedWalkingRobots[C]//IEEE7thInternationalWorkshoponAdvancedMotionControl.Harbin, 2002: 431-436.
[8]MingD,YukiM.Lift-upMotionGenerationofNursing-careAssistantRobotBasedonHumanMuscleForceandBodySoftnessEstimation[C]// 2014IEEE/ASMEInternationalConferenceonAdvancedIntelligentMechatronics(AIM).Besan?on, 2014:1302-1307.
[9]ToshiharuM,ShinyaH.Whole-BodyContactManipulationUsingTactileInformationfortheNursing-CareAssistantRobotRIBA[C]//2011IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems.SanFrancisco, 2011:25-30.
[10]蔡自興.機器人學[M].北京:清華大學出版社,2009.
[11]張濤.機器人引論[M].北京:機械工業出版社,2010.
(編輯華中平)
Analysis of Motion Stability of a Mobile Humanoid Nursing Robot
Yun Jintian1,2Deng Lihao1,2Sang Hongqiang1,2
1. Advanced Mechatronics Equipment Technology Tianjin Area Major Laboratory,Tianjin, 300387 2. Tianjin Polytechnic University, Tianjin, 300387
When a nursing robot assisted medical staff to take good care of the patients, the motion stability of the robot was the most concern, which was directly related to the success or failure of the nursing tasks. When the nursing robot lifted the patients with arm and waist, tilting and sliding would most likely to occur. Herein, an omni-directional mobile humanoid nursing robot was taken as the research object, and the motion stability was analyzed from two aspects of static and dynamic. Under the conditions of no load and low speed motion, centre of gravity projection method was used to analyze the static stability; under the load conditions, the theory of ZMP combined with the theory of recursive Newton Euler algorithm was used to analyze the dynamic stability. ADAMS was used to simulate the robot’s movement process, which provides the theoretical and simulation basis for the nursing robot stability.
nursing robot; motion stability; centre of gravity projection method; zero moment point(ZMP); recursive Newton-euler algorithm
2015-10-27
國家自然科學基金資助項目(51205287);天津市高等學校科技發展基金計劃資助項目(20110402)
TP242.6
10.3969/j.issn.1004-132X.2016.17.006
贠今天,男,1970年生。天津工業大學天津市現代機電裝備技術重點實驗室教授、博士。研究方向為多體動力學與控制。鄧利浩,男,1989年生。天津工業大學機械工程學院碩士研究生。桑洪強,男,1978年生。 天津市現代機電裝備技術重點實驗室教授。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華養生保健(2020年7期)2020-11-16 01:14:02
家庭醫學(下半月)(2019年9期)2019-10-12 08:04:18
經濟技術協作信息(2018年20期)2019-01-19 02:56:26
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國衛生(2016年2期)2016-11-12 13:22:32
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
中國中醫藥現代遠程教育(2014年20期)2014-03-01 04:31:38
終身教育研究(2014年5期)2014-02-28 01:23:06
