GA-T-S云推理網(wǎng)絡(luò)板形模式識別的DSP實現(xiàn)
2016-10-10 05:12:45李海濱高武楊來永進張秀玲
中國機械工程 2016年17期
李海濱 高武楊 來永進 張秀玲
1.燕山大學(xué)河北省工業(yè)計算機控制工程重點實驗室,秦皇島,066004 2.燕山大學(xué)國家冷軋板帶裝備及工藝工程技術(shù)研究中心,秦皇島,066004
?
GA-T-S云推理網(wǎng)絡(luò)板形模式識別的DSP實現(xiàn)
李海濱1,2高武楊1來永進1張秀玲1,2
1.燕山大學(xué)河北省工業(yè)計算機控制工程重點實驗室,秦皇島,066004 2.燕山大學(xué)國家冷軋板帶裝備及工藝工程技術(shù)研究中心,秦皇島,066004
針對現(xiàn)有神經(jīng)網(wǎng)絡(luò)大多是在軟件的基礎(chǔ)上進行仿真,訓(xùn)練時間長,不利于工程實際應(yīng)用的問題,提出了GA-T-S云推理網(wǎng)絡(luò)板形模式識別的DSP實現(xiàn)方法。首先以設(shè)計的板形模式識別GA-T-S云推理網(wǎng)絡(luò)模型為基礎(chǔ), 利用TI TMS320F2812完成T-S云推理網(wǎng)絡(luò)的DSP 設(shè)計;然后利用MATLAB遺傳算法工具箱離線優(yōu)化T-S云推理網(wǎng)絡(luò)參數(shù),將優(yōu)化后的網(wǎng)絡(luò)參數(shù)存入DSP中,進而分別在MATLAB與DSP上運行該網(wǎng)絡(luò);最后將運行結(jié)果分別進行顯示與對比分析。實驗結(jié)果證實了基于GA-T-S云推理網(wǎng)絡(luò)的板形模式識別模型有較高的板形識別精度,能夠正確識別出板形缺陷的類型,同時驗證了GA-T-S云推理網(wǎng)絡(luò)在硬件TI TMS320F2812上實現(xiàn)的可行性與快速性,從而為神經(jīng)網(wǎng)絡(luò)推廣應(yīng)用到實際工程中提供了依據(jù)。
T-S云推理網(wǎng)絡(luò);板形識別;數(shù)字信號處理器;硬件實現(xiàn);遺傳算法
0 引言
近十年來,我國冷軋板帶生產(chǎn)需求一直呈現(xiàn)非常旺盛的局面,現(xiàn)代工業(yè)的發(fā)展對板材的平整度即板形有了更高的要求[1]。板形是板帶鋼的一個重要質(zhì)量指標(biāo),板形研究的最終目的在于解決板形質(zhì)量問題。板形模式識別是板形控制的關(guān)鍵環(huán)節(jié),其主要任務(wù)是根據(jù)板形儀檢測的板形應(yīng)力信號,識別出當(dāng)前帶鋼中存在的板形缺陷類型,為消除或減小板形缺陷、實現(xiàn)板形控制提供依據(jù)。隨著人工智能技術(shù)的快速發(fā)展,許多高效率的算法被應(yīng)用于板形模式識別。文獻[2]提出了一種基于MLSSVR的板形模式識別智能方法,不僅提高了識別的速度和精度,而且具有很強的泛化能力;文獻[3-4]引入了萬有引力算法,該算法泛化能力強,訓(xùn)練速度快;文獻[5]將PID神經(jīng)網(wǎng)絡(luò)用于板形模式識別,仿真結(jié)果顯示PID神經(jīng)網(wǎng)絡(luò)能以較高的精度識別出板形缺陷類型;但以上算法識別精度有限,都是進行軟件仿真,不能直接用于工程實際。
在概率論和模糊數(shù)學(xué)的基礎(chǔ)上,Li等[6]提出了一種新模型——云模型。黃景春等[7]用正態(tài)云模型代替?zhèn)鹘y(tǒng)模糊集理論中的高斯隸屬度函數(shù),結(jié)合T-S模糊神經(jīng)網(wǎng)絡(luò),提出了多輸入單輸出的T-S云推理網(wǎng)絡(luò)。文獻[8]提出了多輸入多輸出的T-S云推理網(wǎng)絡(luò),并用最速下降法辨識網(wǎng)絡(luò)中的參數(shù)。文獻[9]設(shè)計了基于T-S云推理網(wǎng)絡(luò)的板形模式識別模型,同時用遺傳算法(GA)優(yōu)化網(wǎng)絡(luò)中的參數(shù),進而在MATLAB的基礎(chǔ)上進行了仿真驗證,雖然該模型的識別精度高,能夠正確識別出板形缺陷的類型,但這只是軟件仿真驗證,尚不能直接應(yīng)用到工程實際。針對該問題,本文在文獻[9]的基礎(chǔ)上設(shè)計了基于DSP的T-S云推理網(wǎng)絡(luò),將通過GA離線優(yōu)化的網(wǎng)絡(luò)參數(shù)存入DSP程序中,并在DSP中運行該網(wǎng)絡(luò)。實驗結(jié)果證實了基于GA-T-S云推理網(wǎng)絡(luò)的板形模式識別模型在硬件DSP上有較高的板形識別精度,能夠正確識別出板形缺陷的類型;驗證了GA-T-S云推理網(wǎng)絡(luò)在硬件TITMS320F2812上實現(xiàn)的可行性與快速性,為神經(jīng)網(wǎng)絡(luò)更多地應(yīng)用到實際工程中提供了依據(jù)。
1 GA-T-S云推理網(wǎng)絡(luò)設(shè)計
1.1云模型
定義1[10]設(shè)U是一個用精確數(shù)值表示的定量論域,C是U上的定性概念,若定量值x∈U,且x是定性概念C上的一次隨機實現(xiàn),x對C的確定度μ(x)∈[0,1]是有穩(wěn)定傾向的隨機數(shù),即
?x∈Ux→μ(x)
則x在論域U上的分布稱為云,每一個x稱為一個云滴。

(1)
則x在論域U上的分布稱為正態(tài)云。
期望Ex(expectedvalue)、熵En(entropy)和超熵He(hyperentropy)這3個數(shù)字特征被用來表征云這個概念。正態(tài)云模型以及它的3個數(shù)字特征如圖1所示。
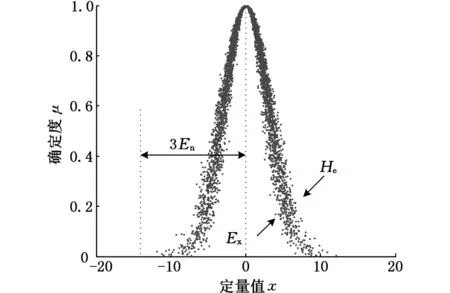
圖1 正態(tài)云模型及其3個數(shù)字特征
期望Ex代表云滴在論域空間中的分布期望值,可以說是云的最典型樣本。熵En一方面是定性概念模糊性的度量,反映論域空間中被概念采納的云滴數(shù)量上的范圍;另一方面又是定性概念隨機性的度量,反映了可以代表該定性概念的云滴的分散程度。超熵He是熵的不確定性度量,即熵的熵。
1.2T-S云推理網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計
日本學(xué)者Takagi和Sugeno于1985年提出了T-S模糊神經(jīng)網(wǎng)絡(luò),該網(wǎng)絡(luò)由模糊邏輯和神經(jīng)網(wǎng)絡(luò)共同構(gòu)成,具有知識存儲、自組織自學(xué)習(xí)和處理不確定性信息的能力,廣泛應(yīng)用于模式識別和智能控制領(lǐng)域,給模糊控制理論的研究和應(yīng)用帶來了深遠(yuǎn)的影響。
在T-S模糊神經(jīng)網(wǎng)絡(luò)中,經(jīng)常選擇高斯函數(shù)作為模糊推理的隸屬度函數(shù)。高斯函數(shù)的表達式為
(2)
高斯隸屬度函數(shù)的形狀和分布如圖2所示。在本文中,用正態(tài)云模型來取代高斯隸屬度函數(shù),云隸屬度函數(shù)的形狀和分布如圖3所示。
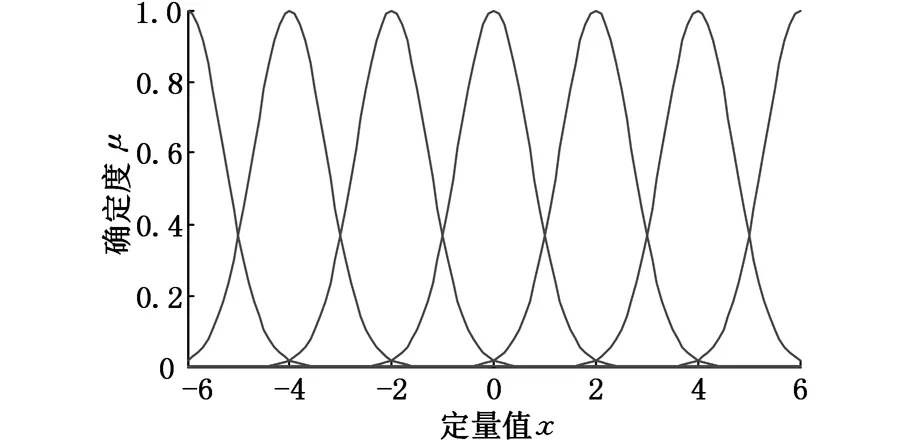
圖2 高斯隸屬度函數(shù)的形狀和分布

圖3 云隸屬度函數(shù)的形狀和分布
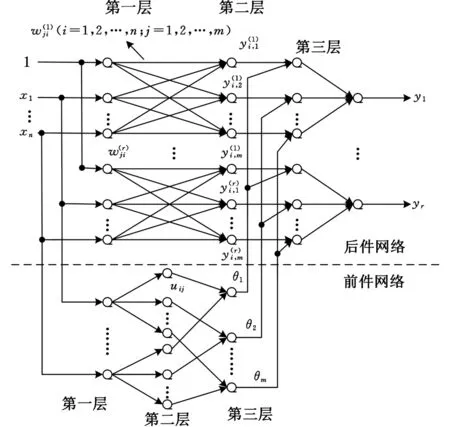
圖4 T-S云推理網(wǎng)絡(luò)結(jié)構(gòu)
由圖2和圖3可以看出,高斯隸屬度函數(shù)和云隸屬度函數(shù)是非常相似的,云模型的引入是為了加強了網(wǎng)絡(luò)處理不確定性信息的能力,這是因為云模型不僅可以反映模糊性,而且可以描述隨機性以及模糊性和隨機性之間的關(guān)聯(lián)性。在此基礎(chǔ)上,本文設(shè)計了T-S云推理神經(jīng)網(wǎng)絡(luò)。T-S云推理神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)如圖4所示。前件網(wǎng)絡(luò)有以下三層。
(1)第一層為輸入層,該層是把輸入變量引到前件網(wǎng)絡(luò),其中節(jié)點的數(shù)量為n。
(2)第二層為云化層,該層的任一節(jié)點都表示一個正態(tài)的云模型,作用是把輸入變量云化。任一個輸入變量的云化劃分?jǐn)?shù)為m,總節(jié)點數(shù)量為mn。
(3)第三層為云推理層,即云規(guī)則層。該層的任一個節(jié)點代表一條云準(zhǔn)則,它的功能是用來配合云規(guī)則的前件,計算每條準(zhǔn)則的適用度,一般用代數(shù)乘積表示(該層的節(jié)點數(shù)量為m),即
(3)
后件網(wǎng)絡(luò)層與層之間成線性的關(guān)系,算法容易,隱含層的輸出為
(4)
x0=1k=1,2,…,rj=1,2,…,m
式中,r為網(wǎng)絡(luò)輸出量的維數(shù)。
網(wǎng)絡(luò)的總輸出為
(5)
當(dāng)?shù)趐個樣本輸入網(wǎng)絡(luò)中時,誤差為網(wǎng)絡(luò)輸出的誤差平方之和:
(6)
式中,dk為期望輸出。
所有待學(xué)習(xí)樣本輸入網(wǎng)絡(luò)后,總誤差E為網(wǎng)絡(luò)優(yōu)化的目標(biāo)函數(shù):
(7)
1.3T-S云推理網(wǎng)絡(luò)的GA優(yōu)化
云推理網(wǎng)絡(luò)的GA優(yōu)化流程如圖5所示。
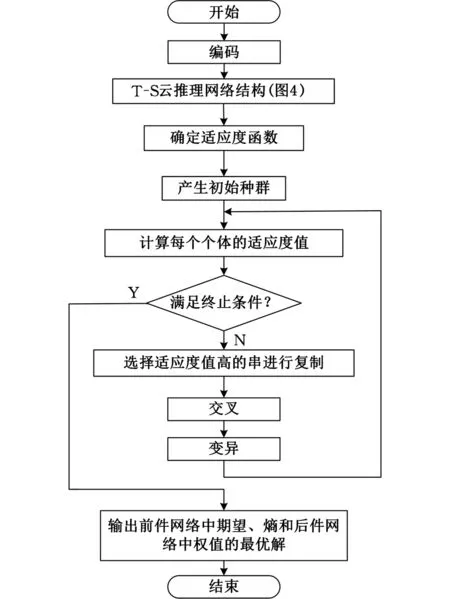
圖5 云推理網(wǎng)絡(luò)的GA優(yōu)化流程
GA是模擬自然界中的生物進化過程慢慢演化而來的隨機化搜索算法[11],它模擬自然界中選擇和生物遺傳過程中交叉、變異現(xiàn)象,在迭代的過程中保留一組候選的解,按照某種指標(biāo)選取比較好的個體,利用遺傳算子對這些個體進行重組,產(chǎn)生新的種群,重復(fù)上述過程,直至滿足指標(biāo)。
采用GA優(yōu)化T-S云推理網(wǎng)絡(luò),選擇式(7)作為適應(yīng)度函數(shù),選取多個樣本來進行網(wǎng)絡(luò)訓(xùn)練。在超熵He已經(jīng)確定的條件下,優(yōu)化前件網(wǎng)絡(luò)中云模型的數(shù)字特征期望Ex、熵En和后件網(wǎng)絡(luò)中的網(wǎng)絡(luò)權(quán)值w。
2 T-S云推理網(wǎng)絡(luò)的板形模式識別
2.1板形信號的基本模式
板形識別的目的是根據(jù)實際測量到的板形離散信號分辨出當(dāng)前帶鋼中存在的板形缺陷類型是由哪一種或幾種板形缺陷基本模式以何種組合而來。常見的板形識別信號基本模式包括左邊浪、右邊浪、中間浪、雙邊浪、右三分浪、左三分浪、四分浪和邊中浪[12],殘余應(yīng)力沿板寬方向的分布曲線如圖6所示。
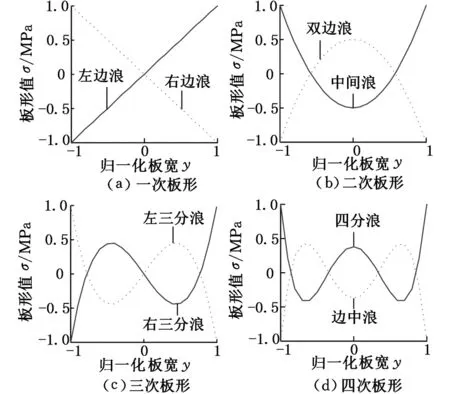
圖6 板形基本模式
軋制后帶鋼板形殘余應(yīng)力值必須滿足在板寬橫向方向積分值大小為零,即板形性質(zhì)。基本模式的歸一化方程為[13-14]如下。
左邊浪的標(biāo)準(zhǔn)歸一化方程為
新型職業(yè)農(nóng)民培育工程系統(tǒng)的數(shù)據(jù)表分析主要包含培訓(xùn)業(yè)務(wù)、培訓(xùn)業(yè)務(wù)單位、培訓(xùn)過程和系統(tǒng)監(jiān)管等信息表的設(shè)計。其中,針對培訓(xùn)業(yè)務(wù)單位的設(shè)計內(nèi)容主要包含工程縣編碼、村稱呼、人口數(shù)量、主要行業(yè)、主管單位和所屬區(qū)域等,其中工程縣編碼為主要工作;針對培訓(xùn)業(yè)務(wù)的設(shè)計內(nèi)容主要涵蓋所有業(yè)務(wù)編號、名稱、日期、人數(shù)和參與人員等,其中業(yè)務(wù)編號為主要工作;針對培訓(xùn)過程的設(shè)計內(nèi)容主要涉及過程編號、時間、授課教師、總?cè)藬?shù)等,其中過程編號為重點工作;針對系統(tǒng)監(jiān)管的設(shè)計內(nèi)容主要為用戶名稱、密碼、聯(lián)系方式以及郵件的主題、發(fā)件人、內(nèi)容和收件人等,其核心工作為用戶名稱。
(8)
式中, y為帶材橫向板寬。
右邊浪的標(biāo)準(zhǔn)歸一化方程為
(9)
中間浪的標(biāo)準(zhǔn)歸一化方程為
(10)
雙邊浪的標(biāo)準(zhǔn)歸一化方程為
(11)
右三分浪標(biāo)準(zhǔn)歸一化方程為
(12)
左三分浪標(biāo)準(zhǔn)歸一化方程為
(13)
四分浪的標(biāo)準(zhǔn)歸一化方程為
(14)
邊中浪的標(biāo)準(zhǔn)歸一化方程為
(15)
軋后板形可表示為板形基本模式的線性組合:
f(y)=a1Y1+a3Y3+a5Y5+a7Y7
(16)
因為ai(i=1,3,5,7)都是可正可負(fù)的,所以上述方程實際上表示了8種板形基本模式的線性組合[15]。a1、a3、a5、a7分別代表一次、二次、三次、四次板形偏差的隸屬度,其大小代表各次板形偏差的含量,符號表示板形缺陷的類型。
2.2板形模式識別的T-S云推理網(wǎng)絡(luò)模型結(jié)構(gòu)設(shè)計

(17)
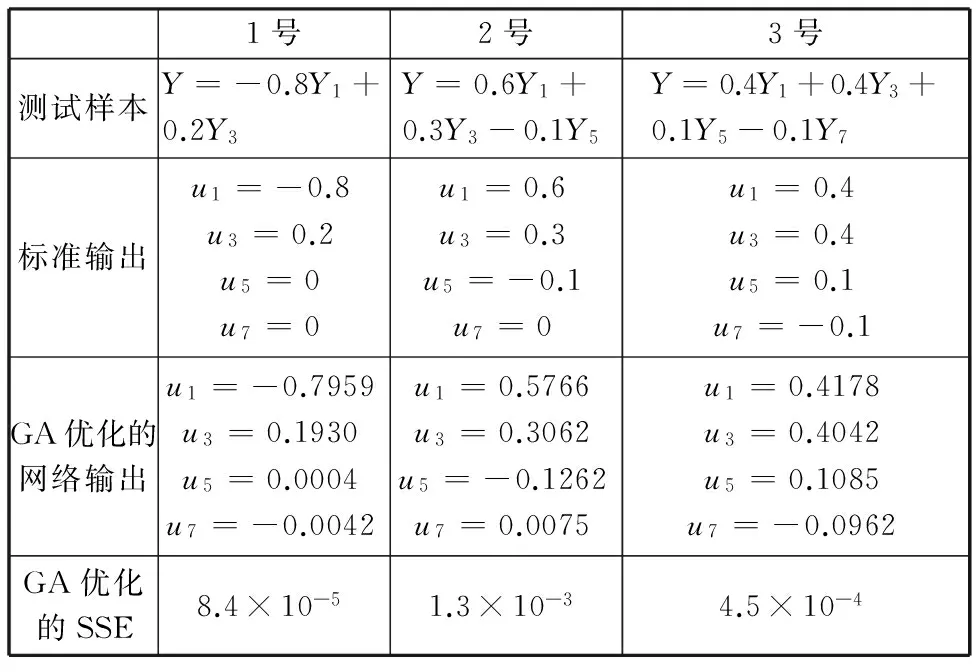
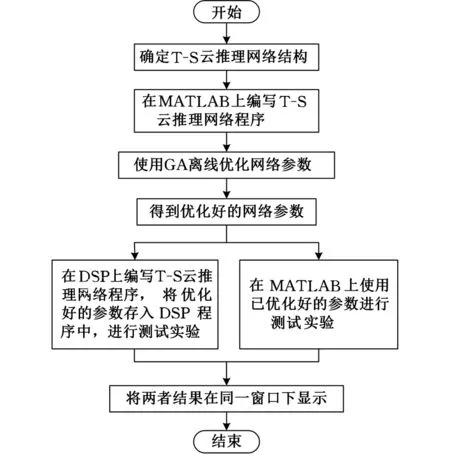
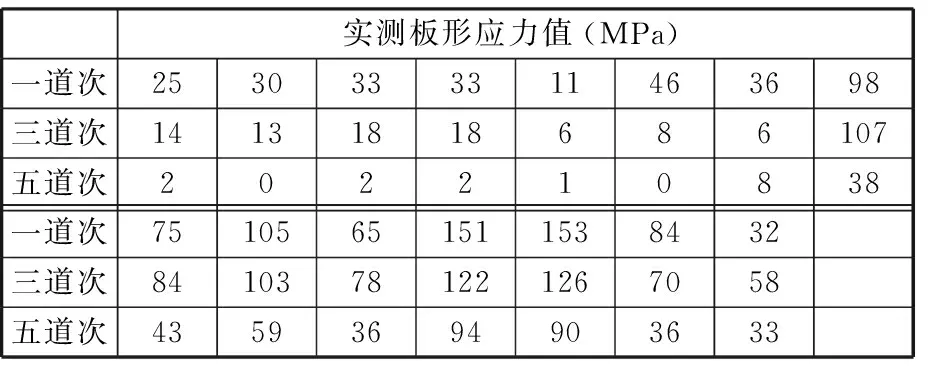
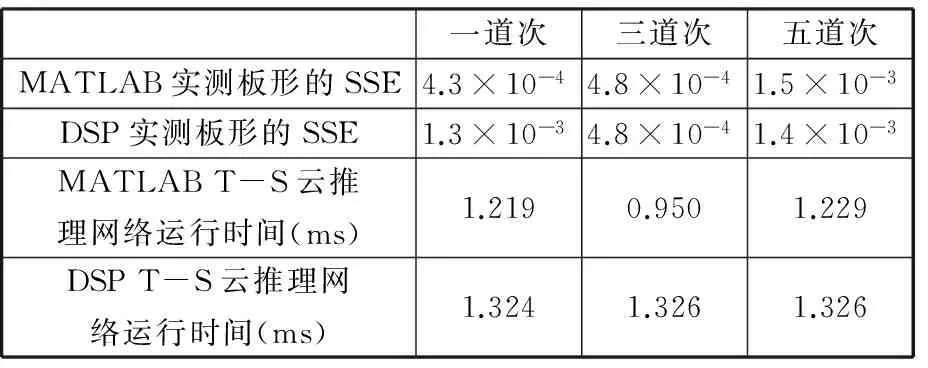
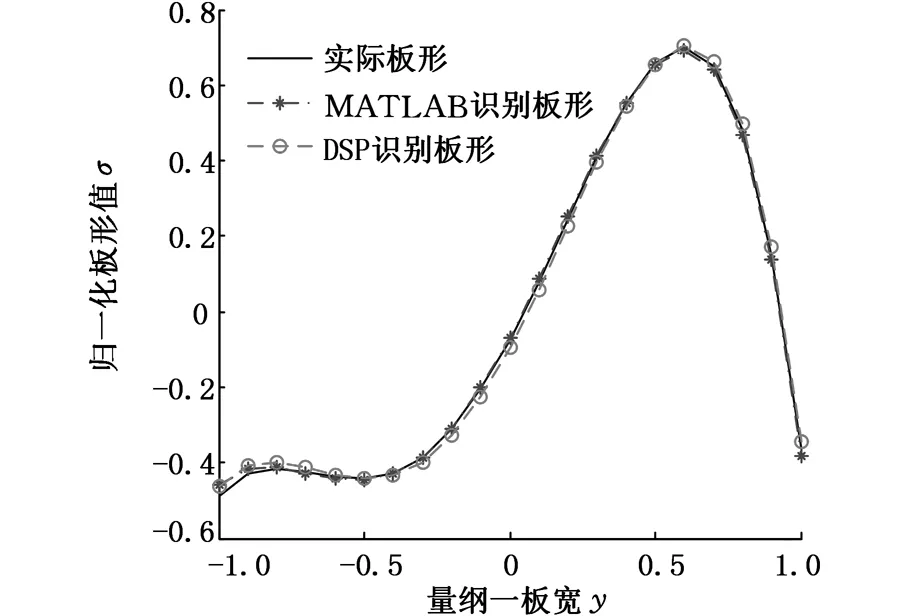
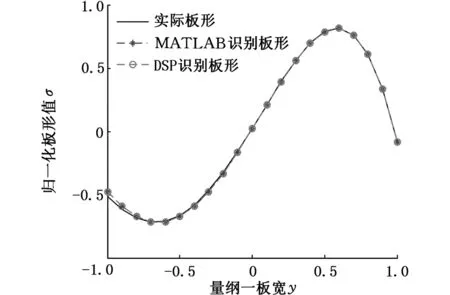
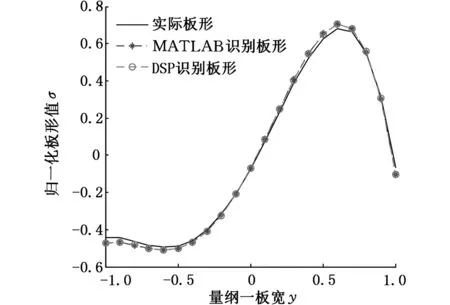
根據(jù)軋機執(zhí)行機構(gòu)的要求[16],識別出的板形基本模式中不能同時存在左邊浪和右邊浪、中間浪和雙邊浪、右三分浪和左三分浪、四分浪和邊中浪。設(shè)Dk、Dk+1為將要識別的樣本和2個互反基本模式之間的歐氏距離,如果Dk 若D1 若D3 若D5 若D7 在確定了板形模式識別的T-S云推理網(wǎng)絡(luò)模型之后,利用GA優(yōu)化實現(xiàn)板形識別的T-S云推理網(wǎng)絡(luò)參數(shù),即前件網(wǎng)絡(luò)中的期望Ex、熵En和后件網(wǎng)絡(luò)中的權(quán)值,共56個。GA使用實數(shù)編碼方式,碼串個數(shù)為56,設(shè)置起始種群的大小為20,選擇交叉概率為0.8,變異概率為0.2,適應(yīng)度函數(shù)為識別結(jié)果與標(biāo)準(zhǔn)輸出的誤差平方和,如式(7)所示,優(yōu)化目標(biāo)為使適應(yīng)度函數(shù)值達到最小。適應(yīng)度函數(shù)的GA優(yōu)化過程及最佳個體如圖7所示。 圖7 適應(yīng)度函數(shù)的GA優(yōu)化過程及最佳個體 網(wǎng)絡(luò)優(yōu)化訓(xùn)練完成后,用測試樣本來測試其板形識別能力,板形識別結(jié)果見表1。其中,SSE表示識別結(jié)果與標(biāo)準(zhǔn)輸出的誤差平方和。 3.1GA-T-S云推理網(wǎng)絡(luò)DSP實現(xiàn)的背景 人工神經(jīng)網(wǎng)絡(luò)具有很強的非線性擬合能力,可映射任意復(fù)雜的非線性關(guān)系[18],而且學(xué)習(xí)規(guī)則簡單,便于計算機實現(xiàn),具有很強的魯棒性、記 表1 板形識別結(jié)果 憶能力、非線性映射能力以及強大的自學(xué)習(xí)能力,因此,廣泛應(yīng)用于模式識別、圖像識別、智能機器人、預(yù)測估計、系統(tǒng)辨識等領(lǐng)域。但神經(jīng)網(wǎng)絡(luò)算法至今卻較少能夠成功應(yīng)用到實際工程中,分析其原因,主要為以下兩點: (1)神經(jīng)網(wǎng)絡(luò)的計算量比較大,使用軟件編程的方式在基于馮·諾依曼結(jié)構(gòu)的處理器上實現(xiàn)神經(jīng)網(wǎng)絡(luò)的功能很難滿足工程中實時性的指標(biāo)要求,同時軟件編程的方式只是在進行軟件仿真實驗,不能將神經(jīng)網(wǎng)絡(luò)直接應(yīng)用到實際工程中。 (2)即使現(xiàn)在芯片生產(chǎn)廠商正努力研制各種針對神經(jīng)網(wǎng)絡(luò)的專用芯片,但這些芯片價格較高,同時研制處于初級階段,到實際應(yīng)用還需一段時間。 隨著微電子技術(shù)的蓬勃發(fā)展,出現(xiàn)了非馮·諾依曼結(jié)構(gòu)的微處理器,TI公司推出的DSP就是其中的代表產(chǎn)品。DSP一改傳統(tǒng)的馮·諾依曼結(jié)構(gòu),采用了先進的哈佛總線結(jié)構(gòu)[19]。哈佛總線結(jié)構(gòu)的出現(xiàn)使數(shù)據(jù)的吞吐率高了一倍。DSP的出現(xiàn)使一些由于受傳統(tǒng)微處理器速度和結(jié)構(gòu)限制難以實現(xiàn)復(fù)雜算法運算速度要求的場合得以實現(xiàn),且DSP能與外圍設(shè)備相連,實現(xiàn)對外圍設(shè)備的控制。 3.2GA-T-S云推理網(wǎng)絡(luò)板形識別的DSP設(shè)計實現(xiàn) 能否有效地將理論成果運用到實際中的一個重要因素就是神經(jīng)網(wǎng)絡(luò)的實現(xiàn)問題。關(guān)于神經(jīng)網(wǎng)絡(luò)的實現(xiàn)以及如何將仿真中得到的網(wǎng)絡(luò)結(jié)構(gòu)運用到實際控制系統(tǒng)中也有許多方式。這使得神經(jīng)網(wǎng)絡(luò)在實際工程中得到廣泛的運用。神經(jīng)網(wǎng)絡(luò)的實現(xiàn)分為硬件和軟件實現(xiàn)兩種方式。采用軟件方法實現(xiàn)的神經(jīng)網(wǎng)絡(luò)算法,其運算速度受計算機主頻的限制,同時不能與復(fù)雜的外圍設(shè)備相連,因此,尚不能應(yīng)用在工程中。而采用硬件方式實現(xiàn)將能有效地加快其運算速度,且硬件能夠與外圍設(shè)備相連,實現(xiàn)對外圍設(shè)備的控制,故能夠應(yīng)用到實際工程中。 在本文所研究的GA-T-S云推理網(wǎng)絡(luò)板形模式識別的DSP實現(xiàn)中,選用TI 公司推出的32位定點DSP芯片TMS320F2812。它不僅具有強大的數(shù)字信號處理能力,而且具有較為完善的時間管理能力和嵌入式控制功能,被廣泛應(yīng)用于工業(yè)控制,特別是應(yīng)用在處理速度、精度方面要求較高的領(lǐng)域。 在GA-T-S云推理網(wǎng)絡(luò)的DSP實現(xiàn)中,首先根據(jù)T-S云推理網(wǎng)絡(luò)結(jié)構(gòu)編寫基于MATLAB的T-S云推理網(wǎng)絡(luò)程序,其次利用GA對T-S云推理網(wǎng)絡(luò)參數(shù)進行離線優(yōu)化辨識,再次根據(jù)T-S云推理網(wǎng)絡(luò)結(jié)構(gòu)編寫基于DSP的T-S云推理網(wǎng)絡(luò)C語言程序,最后將用GA優(yōu)化好的56個T-S云推理網(wǎng)絡(luò)參數(shù)存入DSP中,運行DSP程序,則該程序能夠進行板形識別,GA-T-S云推理網(wǎng)絡(luò)板形識別的DSP設(shè)計與實現(xiàn)流程如圖8所示。 圖8 GA-T-S云推理網(wǎng)絡(luò)板形識別的DSP設(shè)計與實現(xiàn)流程圖 應(yīng)用DSP實現(xiàn)T-S云推理網(wǎng)絡(luò)板形識別,其實質(zhì)就是給設(shè)計優(yōu)化好的T-S云推理網(wǎng)絡(luò)一個待識別輸入信號,對該網(wǎng)絡(luò)進行推理運算,其主要運用的正是DSP最擅長的乘法和加法運算。 3.3實驗結(jié)果分析 將GA-T-S云推理板形模式識別模型應(yīng)用在某900HC六輥可逆冷軋機中,最大軋制力為8000 kN,板帶材軋制規(guī)格為2.2mm×662mm→0.247mm×662mm,材質(zhì)為SPHC。軋制參數(shù)見表2。采用接觸式板形儀,沿板寬方向共有15個測量端,其主要參數(shù)B為來料板寬,Bi(i=1,2,…,15)為第i段上板帶材的寬度。用板形儀實際測得的數(shù)據(jù)訓(xùn)練該模型,然后對一、三、五道次的實測板形進行識別。待識別樣本見表3。 表2 某900HC六輥可逆冷軋機的軋制參數(shù) 表3 待識別的樣本 將樣本的應(yīng)力值按式(17)轉(zhuǎn)化為歐氏距離,然后做對應(yīng)處理,作為板形識別模型的輸入。MATLAB實測板形與DSP實測板形識別結(jié)果對比見表4。 表4 MATLAB、DSP實測板形識別結(jié)果對比 分別將MATLAB程序和DSP程序識別出的板形和實際板形進行對比,相同道次在同一圖中,板形曲線如圖9所示。 表4和圖9表明:基于GA-T-S云推理網(wǎng)絡(luò)的板形識別模型可以很好地反映出板形缺陷的類型,與實際缺陷類型相比,識別精度較高;該網(wǎng)絡(luò)在MATLAB與DSP環(huán)境下的運行結(jié)果相差很小,驗證了GA-T-S云推理網(wǎng)絡(luò)在硬件DSP上實現(xiàn)的可行性;T-S云推理網(wǎng)絡(luò)在MATLAB與DSP環(huán)境下運行時間相差很小,在DSP中運行時間約1.32 ms,能夠滿足多數(shù)實際應(yīng)用場合(如板形識別)實時性的要求。 圖9 MATLAB、DSP一道次板形對比曲線 圖10 MATLAB、DSP三道次板形對比曲線 圖11 MATLAB、DSP五道次板形對比曲線 (1)基于GA-T-S云推理網(wǎng)絡(luò)的板形模式識別模型有較高的板形識別精度,能夠正確識別出板形缺陷的類型。 (2)通過實驗驗證了GA-T-S云推理網(wǎng)絡(luò)在TI TMS320F2812上實時實現(xiàn)的可行性及有效性,說明基于DSP的T-S云推理網(wǎng)絡(luò)實時實現(xiàn)在板形識別等實際應(yīng)用領(lǐng)域具有廣闊的前景。 (3)MATLAB與DSP有機結(jié)合可以充分發(fā)揮兩者的優(yōu)點,完成神經(jīng)網(wǎng)絡(luò)的優(yōu)化設(shè)計與硬件實現(xiàn),為神經(jīng)網(wǎng)絡(luò)普及推廣到實際工程中提供了新方法。 [1]Zhang Yun, Yang Quan, Wang Xiaochen. Control Strategies of Asymmetric Strip Shape in Six-high Cold Rolling Mill [J]. Journal of Iron and Steel Research, International, 2011, 18(9): 27-32. [2]張秀玲,張少宇,趙文保,等.板形模式識別的多輸出最小二乘支持向量回歸機新方法[J].中國機械工程,2013, 24(2): 258-262. Zhang Xiuling, Zhang Shaoyu, Zhao Wenbao,et al.A Novel Method for Flatness Pattern Recognition via MLSSVR[J]. China Mechanical Engineering, 2013, 24(2): 258-262. [3]牛培峰,李鵬飛,李國強,等.基于萬有引力優(yōu)化的支持向量機模型在板形識別中的應(yīng)用[J].鋼鐵,2012,47(12): 45-49. Niu Peifeng, Li Pengfei, Li Guoqiang,et al. Application of GSA-SVR Model in Flatness Pattern Recognition[J].Iron and Steel, 2012, 47(12): 45-49. [4]Rashedi E, Nezamabadi-Pour H, Saryazdi S. GSA: a Gravitational Search Algorithm[J]. Intelligent Information Management, 2012, 4(6):390-395. [5]張秀玲,徐騰,趙亮,等.基于GA-PID神經(jīng)網(wǎng)絡(luò)的板形模式識別方法[J].沈陽大學(xué)學(xué)報(自然科學(xué)版), 2013, 25(3): 209-214. Zhang Xiuling, Xu Teng, Zhao Liang,et al. Method of Flatness Pattern Recognition Based on GA-PID Neural Network[J].Journal of Shenyang University(Natural Science Edition),2013, 25(3): 209-214. [6]Li Deyi, Liu Changyu, Liu Luying. Study on the Universality of the Normal Cloud Mode [J]. Engineering Sciences, 2004, 6(8): 18-24. [7]黃景春,肖建,周聰.一種基于T-S云模型的非線性系統(tǒng)的控制[J].電機與控制學(xué)報,2009,13(1):149-156. Huang Jingchun, Xiao Jian, Zhou Cong.T-S Cloud Model for Nonlinear Systems Control[J].Electric Machines and Control,2009,13(1):149-156. [8]張秀玲,趙文保,張少宇,等. 基于改進T-S云推理網(wǎng)絡(luò)的板形模式識別方法[J].中南大學(xué)學(xué)報(自然科學(xué)版), 2013, 44(2): 580-586. Zhang Xiuling, Zhao Wenbao, Zhang Shaoyu,et al. Method of Flatness Pattern Recognition Based on Improved T-S Cloud Inference Network[J].Journal of Zhongnan University(Natural Science Edition), 2013, 44(2): 580-586. [9]Zhang X, Zhao L, Zang J, et al. Hybrid MATLAB and LabVIEW with T-S Cloud Inference Neural Network to Realize a Flatness Intelligent Control System[J]. Steel Research International, 2014, 85(12): 1639-1652. [10]李德毅,杜鹢.不確定性人工智能[M].北京:國防工業(yè)出版社,2005. [11]雷英杰. MATLAB遺傳算法工具箱及應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2004. [12]單修迎,劉宏民,賈春玉.含有三次板形的新型板形模式識別方法[J].鋼鐵,2010,45(8):56-60. Shan Xiuying, Liu Hongmin, Jia Chunyu. A Recognition Method of New Flatness Pattern Containing the Cubic Flatness[J]. Iron and Steel,2010,45(8):56-60. [13]張秀玲,劉宏民.板形模式識別的GA-BP模型和改進的最小二乘法[J].鋼鐵,2003,38(10):29-34. Zhang Xiuling, Liu Hongmin.GA-BP Model of Flatness Pattern Recognition and Improved Least-Squares Method[J]. Iron and Steel,2003,38(10):29-34. [14]何海濤,李楠.基于SVM的改進RBF網(wǎng)絡(luò)板形模式識別方法[J].自動化儀表,2007,28(5):1-8. He Haitao, Li Nan.The Improved RBF Network Approach to Flatness Pattern Recognition Based on SVM[J]. Process Automation Instrumentation,2007,28(5):1-8. [15]Jung J Y, Im Y T. Simulation of Fuzzy Shape Control for Cold-rolled Strip with Randomly Irregular Strip Shape[J]. Materials Processing Technology,1997,63 (1/3):248-253. [16]Xu Lejiang. Flatness Control in Cold Strip Polling and Mill Type Selection[M].Beijing:Metallurgical Industry Press,2007. [17]Peng Yan, Liu Hongmin, Wang Dongcheng. Simulation of Type Selection for 6-high Cold Tandem Mill Based on Shape Control Ability[J].Journal of Central South University of Technology, 2007, 14(2): 278-284. [18]陳麗安.基于DSP的BP神經(jīng)網(wǎng)絡(luò)實時實現(xiàn)[C]//中國自動化學(xué)會華東地區(qū)第十九屆學(xué)術(shù)年會.青島,2006:124-126. [19]顧衛(wèi)鋼.手把手教你學(xué)DSP——基于TMS320X-281X[M].北京:北京航空航天大學(xué)出版社,2011. (編輯陳勇) FlatnessPatternRecognitionviaGA-T-SCloudInferenceNetworkImplementedbyDSP LiHaibin1,2GaoWuyang1LaiYongjin1ZhangXiuling1,2 1.KeyLaboratoryofIndustrialComputerControlEngineeringofHebeiProvince,YanshanUniversity,Qinhuangdao,Hebei,066004 2.NationalEngineeringResearchCenterforEquipmentandTechnologyofColdStripRolling,YanshanUniversity,Qinhuangdao,Hebei,066004 Theexistingneuralnetworkswearemostlysoftwaresimulationandthetrainingtimewaslong,thusthatwouldnotconducivetoengineeringapplications.Inviewoftheaboveproblems,flatnesspatternrecognitionviaGA-T-ScloudinferencenetworkimplementedbyDSPwaspresentedherein.Firstly,theDSP’sdesignofT-ScloudinferencenetworkwasimplementedbyusingTITMS320F2812onthebasisofflatnesspatternrecognitionviaGA-T-Scloudinferencenetwork.ThenT-ScloudinferencenetworkparameterswereoptimizedthroughgeneticalgorithmtoolboxofMATLABinoff-linemannerandtheseparametersweretransmittedtoDSPlater.ThenetworkwasrunonMATLABandDSPseparately.Finally,thetworesultsofT-Scloudinferencenetwork,whichwasrunonMATLABandDSPrespectively,werecomparedandanalyzed.ExperimentalresultsconfirmthatGA-T-Scloudinferencenetworkhavehighaccuracyintermsofflatnesspatternrecognition,itcanidentifythedefecttypesofflatnesscorrectly.Atthesametime,theexperimentalresultsverifythattheT-ScloudinferencenetworkcanrunonthehardwareTITMS320F2812inafastspeedanditprovidesabasisforneuralnetworksappliedtopracticalengineering. T-Scloudinferencenetwork;flatnessrecognition;digitalsignalprocessor(DSP);hardwareimplementation;geneticalgorithm(GA) 2015-10-22 國家自然科學(xué)基金資助項目(61007003);河北省自然科學(xué)基金-鋼鐵聯(lián)合研究基金資助項目(E2015203354);河北省教育廳科學(xué)研究計劃;河北省高等學(xué)校自然科學(xué)研究重點項目(ZD2016100) TP273 10.3969/j.issn.1004-132X.2016.17.012 李海濱,男,1978年生。燕山大學(xué)電氣工程學(xué)院教授、博士研究生導(dǎo)師。主要研究方向為航天測控技術(shù)、自主機器人視覺重建、工業(yè)過程智能控制。獲省級科技進步三等獎1項、儀器儀表科學(xué)技術(shù)獎1項。發(fā)表論文40余篇。高武楊,男,1991年生。燕山大學(xué)電氣工程學(xué)院碩士研究生。來永進,男,1990年生。燕山大學(xué)電氣工程學(xué)院碩士研究生。張秀玲,女,1968年生。燕山大學(xué)電氣工程學(xué)院教授、博士。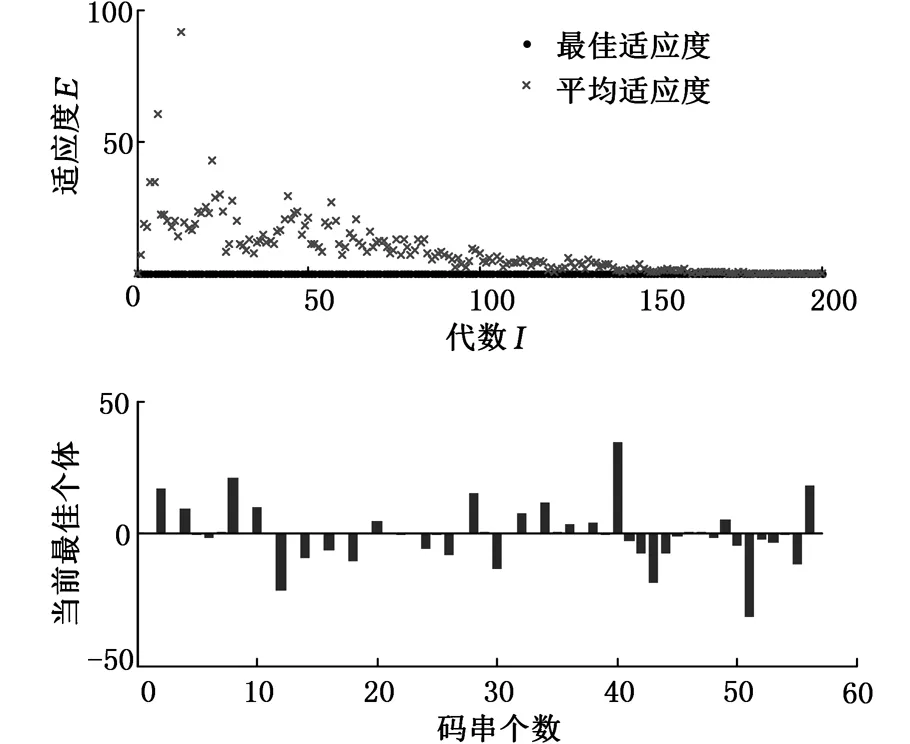
3 GA-T-S云推理網(wǎng)絡(luò)板形識別的DSP實現(xiàn)

4 結(jié)論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24電子測試(2017年23期)2017-04-04 05:06:50智能系統(tǒng)學(xué)報(2017年5期)2017-01-22 11:21:30光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
