基于分層結構的智能車系統架構
2016-09-22 02:54:16李明喜黃向東劉志峰
軍事交通學院學報 2016年6期
袁 一,李明喜,黃向東,劉志峰
(1.軍事交通學院 軍用車輛系,天津 300161; 2.廣州汽車集團股份有限公司,廣州 511400)
?
● 車輛工程Vehicle Engineering
基于分層結構的智能車系統架構
袁一1,李明喜1,黃向東2,劉志峰2
(1.軍事交通學院 軍用車輛系,天津 300161; 2.廣州汽車集團股份有限公司,廣州 511400)
為研究國內外智能車系統架構,分析了國外典型智能車的系統架構及其優缺點。對軍事交通學院的智能車軟硬件系統架構進行介紹,利用分層技術對智能車硬件系統和軟件系統分層結構的物理與邏輯關系進行設計,使其具備良好的容錯性和可伸縮性,并在實際實施中得到良好的驗證。
分層結構;智能車;系統架構
系統架構是智能車輛的感知、決策、控制等功能模塊的物理設備與軟件模塊之間的邏輯結構與內在聯系的組織與構成方式。智能車需要強大的環境感知能力、信息處理能力和實時決策與控制能力,這些能力是由多種復雜的硬件群和軟件群共同組成和實現的。這些硬件群和軟件群的邏輯結構與組織方式的優劣將在很大程度上決定智能車輛的功能實現和性能的優劣(如可靠性、可擴展性、可移植性等)。隨著硬件(如傳感器、計算機等)和軟件技術(如人工智能技術)等的不斷發展,智能車輛的系統架構也在不斷地發展和進步。
1 國外典型智能車系統架構
在智能車技術的研究方面,國外起步較早,典型的研究代表如美國卡耐基梅隆大學NavLab系列智能車、美國斯坦福大學智能車、意大利帕爾馬大學The ARGO vehicle智能車、谷歌公司的Google Driverless Car等。
1.1卡耐基梅隆大學BOSS智能車系統架構
卡耐基梅隆大學的機器人研究所研發的NavLab系列智能車,早在1995年6月便進行了穿越美國的實驗,行程4 587 km,其中自主駕駛部分占98.2%,最長自主駕駛距離為111 km,全程平均速度為102.72 km/h[1],在2007年美國舉行的智能車挑戰賽中取得了冠軍。
圖1為Boss智能車系統架構示意圖,該系統架構基于自動駕駛的任務被劃分成5大模塊[2]。

圖1 Boss智能車系統架構
機械電子模塊:是智能車的硬件組成,機械設計和電子設計是實現無人駕駛的基礎。
任務規劃模塊:主要功能是根據路網文件(RNDF)所提供的知識信息來估算智能車所承擔的時間成本和風險成本,并且計算出車輛要到達的下一個檢測點,這些信息還會包含車輛所選擇行駛路徑的交通擁堵狀況、限速情況等。
行為決策模塊:是通過狀態機的方法實現的,它首先將智能車自主駕駛任務分解成一系列的自主駕駛行為(比如車輛跟隨行駛、換道行駛、路口行駛、自主停車等),然后根據車輛當前的行駛狀態通過狀態機來觸發不同的駕駛行為。
動作執行模塊:即車輛運動的控制,車輛駕駛行為的實現最終表現為車輛運動的控制,主要包括車輛運動姿勢的調整與控制、對障礙物的處理等。
環境感知與空間建模:該模塊通過對多種傳感器(GPS、雷達、相機等)的信息進行融合處理,對車輛行駛的道路環境進行三維重構,為其他模塊的運行提供信息參考。
1.2斯坦福大學智能車系統架構
2005年,斯坦福大學的Stanley智能車在美國智能車挑戰賽中取得了第1名;2007年,斯坦福大學的Junior智能車在城市挑戰賽中摘取了第2名[3]。該智能車系統由大約30個并行執行的模塊構成。系統分為6層,分別為傳感器接口層、環境感知層、決策控制層、車輛接口層、用戶界面層與全局服務層[4](如圖2所示)。
傳感器接口層:包含一系列傳感器信息接收模塊。這個模塊與標記所有傳感器數據的接收和時間有關,還包含一個具有道路坐標信息的數據庫服務器(RDDF文件)。
環境感知層:將傳感器數據映射到內部模型上。這一層的基本模型是基于Kalman濾波的車輛狀態檢測器,可以計算出車輛的坐標、方向和速度。基于激光、相機和雷達系統的3種不同的映射模塊建立出二維環境地圖,尋路模塊用激光源地圖檢測道路的邊界,使車輛可以通過橫向控制保持在道路中央。最后,路面評估模塊通過提取當前路面的相關參數以確定車輛行駛的安全速度。
決策控制層:負責調節車輛的轉向、油門和剎車。路徑規劃模塊確定車輛的行駛軌跡,傳遞給兩個閉環軌跡跟蹤控制器,一個用于轉向控制,一個用于剎車和油門控制。這兩個控制器都將控制命令發送到執行機構用于駕駛動作的執行。控制層有一個高級控制模塊,作為一個簡單的有限狀態自動機,這一層根據接收到的用戶指令決定車輛行駛的基本模式,指令來自車載觸屏或者緊急停車搖控裝置。
車輛接口層:作為智能車線控系統的接口,它包括通向車輛剎車、油門和轉向輪的所有接口以及車輛許多系統的電源接口。

圖2 斯坦幅大學Junior智能車系統架構
用戶界面:用戶界面包括遠程緊急停車和遠程啟動的觸摸屏模塊。
全局服務層:全局服務層提供所有軟件模塊的基本服務。通信服務由卡耐基梅隆大學的進程間通信工具包提供。參數服務器維持一個包含所有車輛參數的數據庫并以標準的協議更新所屬車輛。系統異常檢測模塊監控所有系統組件的運行狀況并在必要時重新啟動個別子系統。時鐘的同步通過時間服務器實現。數據日志服務器時時記錄傳感、控制和診斷數據以便回顧和分析。
1.3國外智能車系統架構分析
(1)研究機構對智能車的架構問題是作為關鍵技術進行重點研究的,均以模塊功能為重點劃分結構單元,這樣的架構設計對智能車的各個技術領域的任務分工建立了明確的邊界,有效地保證了各個任務單元的獨立性,對于整體項目的組織實施帶來了便利[3-4]。
(2)架構均建立了感知、決策、控制、車輛、用戶界面等基本子系統單元,斯坦福大學的智能車架構中還增加了全球服務層,用以滿足系統的運行檢測和數據日志記錄功能[5-6]。
上述的智能車在比賽中的成績證明了他們的系統架構是能夠滿足智能車設計的需要,但是這些架構仍然存在著一些不足:一是架構設計過于宏觀。上述架構雖能呈現智能車系統架構的主要方面,但是對子系統間的聯系并沒有給出明確的定義,架構設計圖很難與具體的模塊實現相互映射,必然造成系統接口的混亂和冗余[7]。二是系統硬件技術滯后。智能車的傳感器技術是一個高速發展的領域,傳感器技術的性能直接影響系統的架構特征,上述智能車采用的傳感器嚴重超出車輛外部尺寸限制要求,對車輛的外形造成明顯的影響。
2 軍事交通學院智能車的系統架構
軍事交通學院的智能車(下稱“軍交智能車”)已經研發到第五代[1],系統架構經過多次測試和調整,能夠較好地適應結構化的道路環境,圖3為采用該系統架構的猛獅號智能車硬件架構。

圖3 軍交智能車硬件架構
2.1硬件架構
軍交智能車的硬件架構中,硬件平臺可以分為底層、交換層、感知層、計算層。其中底層指智能車平臺的執行機構驅動控制層,包括轉向驅動、油門驅動、擋位、制動驅動、信號燈驅動、汽車相關附件的驅動(如雨刮、喇叭等控制)。
2.1.1智能車底層硬件設計
軍交智能車底層驅動電路包括3種控制電路:執行機構控制電路(包括轉向控制電路、油門控制電路、抽動控制電路)、燈光音響等信號控制電路和電源及中央控制管理電路。
中央控制管理電路相當于智能車的小腦,它能夠獨立控制智能車輛其他系統的能源,實現對2臺工控機、64線雷達、GPS/慣導、毫米波雷達、四線雷達、一線雷達等車載傳感器的電源控制,并保證在上位機系統失效時使智能車能夠安全停止。該電路的可靠性很高,功耗極低,始終處于工作狀態。
執行機構控制電路分別實現線控轉向、線控油門和線控制動控制。線控轉向電路可以接收CAN總線的角度位置和轉向速度的指令,實現轉向盤位置的實時控制;油門控制電路能夠以4096級的精度對發動機的油門開度進行精確調節;制動電路通過PWM調壓方式對液壓馬達轉速控制,實現了制動由緩到急的多級控制效果,同時檢測液壓制動回路制動油壓作為反饋信息。
信號控制電路實現大燈、轉向燈、制動燈、雨刮及噴水、喇叭的控制。
2.1.2智能車感知系統設計
軍交智能車的感知系統,針對越野道路環境的要求,以三維激光雷達作為主要的感知手段,輔助以4線激光雷達和一線激光雷達,同時以GPS、北斗、GNSS衛星接收儀器作為定位裝置,提供3~5 m精度的位置信息,實現了越野道路環境的初步感知(如圖4所示)。軍交智能車傳感器系統的配置和感知能力描述見表1。

圖4 軍交智能車的傳感器安裝與感知范圍

項 目參 數 傳感器配置2臺視覺攝像頭1臺一線sick激光雷達1臺三維64線激光雷達1臺4線激光雷達1臺GPS定位系統1臺光纖慣性導航系統感知范圍64線:5~70m@360°,精度210cm前方視覺:0~30m@60°,精度0~2m前方4線:0~100m@110°,精度20cm前方1線:0~50m@180°,精度20cm
2.1.3智能車計算與網絡平臺
軍交智能車采用2臺core i5的工控機作為計算平臺,計算機具有4 G內存,128 G硬盤,2個千兆網口,4個串口,2個485接口,2個CAN接口,4個1394接口。2臺計算機之間,以及計算機與傳感器之間通過千兆交換機實現數據交換。計算機與底層控制系統通過CAN總線進行數據交換。
2.2軟件架構
軍交系列智能車軟件系統根據分層、隔離、模塊化的設計思路,將整個系統分解為傳感器層、感知層、規劃與決策、控制層、人機交互層、公共層、執行層(如圖5所示)。
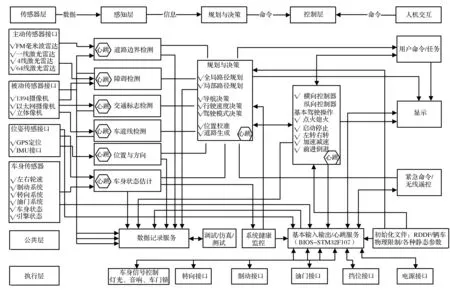
圖5 軍交智能車系統架構
傳感器層:由雷達傳感器、視覺傳感器、GPS、車身傳感器等組成,主要完成采集傳感器數據任務。其中為實現傳感器即插即用,需要規范各類傳感器的標準數據格式。這一層將采集到的傳感器數據送入感知模塊處理。
感知層:主要完成分析傳感器數據,實現道路邊界檢測、障礙檢測、交通標識檢測、車身狀態估計等,為智能車規劃決策做準備。
規劃與決策:主要完成路徑規劃和導航。通過分析從感知模塊得到的環境數據和自身數據,在精細電子地圖上確定車輛位置,并根據目標點坐標生成行駛軌跡,決策出智能車的駕駛模式。
控制層:依據軌跡數據和當前車輛狀態,控制車輛按軌跡行駛。同時,接收人為干預指令,進行加減速和轉向操作。該層直接將控制指令輸出至車輛的油門、制動和轉向控制器。
人機交互層:接收駕駛員的觸摸指令和緊急制動指令,輸出至控制層。同時,也可以通過聲音和圖像反饋環境和車輛自身信息,供駕駛員參考。
公共層:為以上各層服務,包括數據通信、數據記錄、地圖文件讀寫等。
執行層:直接關聯車輛的電控模塊,接收控制指令,完成駕駛動作,如加減油門、電動轉向操作、電源控制等。
2.3軍交智能車系統架構分析
軍交智能車的架構設計自2009年開始至今,共經歷了五代的改進和完善,并在10臺以上不同類型的智能車平臺上得到實現。
(1)系統架構明確地劃分為2個部分:硬件部分和軟件部分。這樣的劃分方法,目的在于實現軟件的平臺無關性,保證系統軟件能夠適應不同硬件配置的要求,從而降低開發成本并降低調試時間。
(2)系統采用分層結構思想,將系統分為7大子系統層:傳感器層、感知層、規劃與決策層、控制層、人機交互層、公共層和執行層。層與層之間相互關聯并相互通信,具有完善的反饋機制,定義了用于信號交換的完備的信號流圖。
(3)系統在架構級別定義了各系統的心跳檢測機制,用以反映各個子系統的運行狀態,在決策層完成智能駕駛系統的狀態檢測和故障判斷。該機制是軍交智能車在實際實現中保證系統可靠性和穩定性的重要創新點,在系統的調試和開發過程中發揮了重要作用。
3 結 語
合理的系統架構是確保智能車實現其功能的基礎,軍事交通學院智能車所采用的系統架構在國內多次比賽中均表現出較為明顯的優勢[1]:一是系統具備較好的可靠性和穩定性;二是系統具備可伸縮性,能夠根據不同的任務要求,進行合理的裁剪和調整;三是系統使冗余和備份得到合理的結合,在降低系統耦合性的同時,實現了系統自備份和和可靠性保證。目前,軍事交通學院智能車架構更多地針對三維激光傳感器進行優化設計,而針對低成本傳感器方面尚未進行系統優化,試驗還不夠充分,這是以后需要研究的重要工作。
[1]徐友春, 王榮本, 李兵,等. 世界智能車輛近況綜述[J].汽車工程, 2001,23(5):289-295.
[2]HERMANCE D,SASAKI S. Hybrid electric vehicles take to the Street[J]. IEEE Spectrum, 1999, 162(3): 387-401.
[3]POWELL B K, BAILEY K E, CIKANEK S R. Dynamic modeling and control of hybrid electric vehicle powertrain system[J]. Control Systems Magazine IEEE, 1998, 142(3): 32-40.
[4]YOU F, WANG R B, ZHANG R H. Algorithm on Lane Changing and Tracking Control Technology for Intelligent Vehicle[C]. Sanya: Proceedings of the 2007 IEEE International Conference on Robot Smart Tech, 2007:1888-1893.
[5]BABER J , KELODKO J, NOEL T.Cooperative autonomous driving intelligent vehicles sharing city roads[J]. IEEE Robotics &Automation Magazine, 2005, 12(1):44-49.
[6]MARTA C Mora, RIEARDO P T. Multi-obstacle tracking and path planning for intelligent vehicles[J]. Turkey: Proceedings of the 2007 IEEE Intelligent Vehicles, 2007:172-177.
[7]MICHEL P C Q,MARY P. Navel self organizing fuzzy neural rule based pilot system for automated vehicles[J]. Neural Networks, 2001, 1(14):1099-1112.
(編輯:史海英)
Hierarchy-Based Architecture of Intelligent Vehicle System
YUAN Yi1,LI MingXi1,HUANG XiangDong2,LIU ZhiFeng2
(1.Military Vehicle Department, Military Transportation University, Tianjin 300161, China;2.Guangzhou Automobile Group Co., Ltd., Guangzhou 511400, China)
To obtain an overall view of the architecture of the intelligent vehicle system, this paper, with an analysis of its advantages and disadvantages, reviews the architecture of the typical intelligent vehicle systems in other countries. Then, the software and the hardware architecture of the intelligent vehicle developed by Military Transporation University is introduced. It is verified that the fault tolerance and scalability of the intelligent vehicle are improved by using hierarchical technology in the design of its hardware and software system hierarchy physical and logical relations.
hierarchy; intelligent vehicle; system architecture
2015-02-10;
2016-04-20.
廣州市市級科技計劃項目(2014Y2-00013).
袁一(1963—),男,碩士,副教授.
10.16807/j.cnki.12-1372/e.2016.06.009
TP242.6
A
1674-2192(2016)06- 0037- 06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32