基于LFM的雙波段雷達(dá)航跡起始方法
2016-09-13 01:50:45鄭嘯宇王建衛(wèi)
現(xiàn)代雷達(dá) 2016年8期
鄭嘯宇,王建衛(wèi)
(南京電子技術(shù)研究所, 南京 210039)
?
·數(shù)據(jù)處理·
基于LFM的雙波段雷達(dá)航跡起始方法
鄭嘯宇,王建衛(wèi)
(南京電子技術(shù)研究所,南京 210039)
線性調(diào)頻(LFM)信號是一種重要的脈沖壓縮信號。由于其具有眾多優(yōu)良性能,在工程實(shí)踐中得到廣泛應(yīng)用。在不同工作頻率下,LFM信號具有不同的距離多普勒耦合系數(shù),脈壓后帶來的不同測距誤差給雙波段雷達(dá)的航跡起始帶來困難。針對該問題,首先分析了多普勒耦合系數(shù)對雙波段雷達(dá)測距的影響,導(dǎo)出了雙波段雷達(dá)的非線性量測方程組;然后,采用加權(quán)最小二乘(高斯-牛頓迭代)法對運(yùn)動目標(biāo)進(jìn)行定位;最后,提出了雙波段雷達(dá)下的航跡起始方法。蒙特卡洛仿真結(jié)果表明:該方法可以在不同波段測量模式下有效提高目標(biāo)航跡起始的準(zhǔn)確率。
線性調(diào)頻;雙波段雷達(dá);航跡起始;距離多普勒耦合
0 引 言
線性調(diào)頻脈沖壓縮技術(shù),可以解決信號同時具有大時寬和大帶寬的矛盾,同時,由于其對多普勒頻移不敏感,即使對高速目標(biāo)匹配濾波仍能起到壓縮作用。因此,實(shí)際工程中廣泛采用線性調(diào)頻信號作為雷達(dá)信號[1-2]。雙波段雷達(dá)采用不同波段同時對運(yùn)動目標(biāo)進(jìn)行探測,具有各自獨(dú)立的收發(fā)系統(tǒng),在數(shù)據(jù)處理階段對兩部雷達(dá)進(jìn)行點(diǎn)跡融合,得到目標(biāo)運(yùn)動軌跡。相比于傳統(tǒng)單波段雷達(dá),雙波段雷達(dá)具有眾多優(yōu)勢:增大目標(biāo)量測的數(shù)據(jù)率,提高弱小目標(biāo)甚至隱身目標(biāo)被檢測概率,增強(qiáng)雷達(dá)的抗干擾能力,擴(kuò)大系統(tǒng)的作用距離和角度分辨率等[3-5]。
線性調(diào)頻信號的雙波段雷達(dá)可以同時獲得雙波段探測和線性調(diào)頻技術(shù)的優(yōu)良特性,但線性調(diào)頻信號經(jīng)過脈沖壓縮后,由于工作中心頻率不同會產(chǎn)生不同的多普勒耦合系數(shù),使雙波段雷達(dá)量測得到的目標(biāo)距離存在一定偏差(與雙波段雷達(dá)耦合系數(shù)和目標(biāo)徑向速度相關(guān)),給運(yùn)動目標(biāo)的航跡起始帶來困難。當(dāng)偏差較大時,甚至無法起始,而航跡起始是目標(biāo)探測和跟蹤的前提條件。為了解決多普勒耦合系數(shù)對測距的影響,常規(guī)單波段雷達(dá)常采用三種方法:(1)純粹數(shù)據(jù)處理方法[6-7],先不考慮耦合影響,Kalman濾波器直接在有距離偏移的條件下進(jìn)行濾波和估計,根據(jù)濾波得到的目標(biāo)徑向速度和距離多普勒耦合系數(shù)對濾波距離進(jìn)行修正;(2)測速方法[8-9],對目標(biāo)速度進(jìn)行精確測量,在耦合系數(shù)已知的情況下對距離走動直接進(jìn)行修正;(3)正負(fù)斜率法[10-11],利用調(diào)頻斜率互為相反數(shù)的脈沖使得距離走動量值相等,符號相反,進(jìn)而通過算術(shù)運(yùn)算消除距離走動。這些方法在單波段雷達(dá)和一定條件下,可以發(fā)揮較好性能,但對于雙波段雷達(dá)有必要對航跡起始困難的問題進(jìn)行深入研究。
為此,本文首先給出了線性調(diào)頻信號距離多普勒走動系數(shù)的一般表達(dá)式;其次,在雙波段(S波段和X波段)背景下,分析了不同走動系數(shù)對雷達(dá)測距的影響,導(dǎo)出了帶走動系數(shù)的雙波段雷達(dá)非線性量測方程組;然后,選取初值運(yùn)用高斯-牛頓迭代法對目標(biāo)初始運(yùn)動狀態(tài)進(jìn)行估計,在此基礎(chǔ)上提出雙波段雷達(dá)下的航跡起始方法;最后,進(jìn)行相關(guān)仿真驗證。
1 問題描述
當(dāng)運(yùn)動目標(biāo)在雷達(dá)探測徑向上存在速度時,采用線性調(diào)頻技術(shù)的回波信號就會發(fā)生多普勒頻移,產(chǎn)生多普勒失配現(xiàn)象,導(dǎo)致接收端匹配濾波的輸出波形在時間軸上發(fā)生一定偏移,其偏移量與目標(biāo)徑向速度、信號帶寬、脈沖寬度和信號中心頻率有關(guān)。雷達(dá)測距主要利用發(fā)射和接收間的時間差,時間軸上的偏移會給雷達(dá)測距帶來誤差。引入誤差項的目標(biāo)距離表達(dá)式
(1)
式中:r′為雷達(dá)的距離測量值;r為目標(biāo)實(shí)際距離;Δr為距離誤差項;f0為發(fā)射信號中心頻率;τ為脈沖寬度;B為信號帶寬;v為目標(biāo)徑向速度。由式(1)可以看出,距離誤差可以表示為目標(biāo)徑向速度與走動系數(shù)的乘積,定義雷達(dá)距離-多普勒耦合系數(shù)(走動系數(shù))
(2)
由式(2)可知,不同波段的雷達(dá)距離走動系數(shù)不同,這會給航跡起始以及目標(biāo)運(yùn)動狀態(tài)估計帶來困難。本文以S波段和X波段的雙波段雷達(dá)為例研究帶走動系數(shù)的航跡起始方法,表1給出了S波段和X波段的走動系數(shù)。
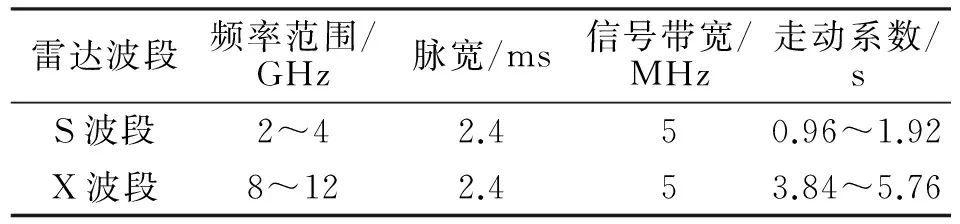
表1 S波段和X波段雷達(dá)走動系數(shù)
假設(shè)S波段雷達(dá)的走動系數(shù)為λS,X波段雷達(dá)的走動系數(shù)為λX。t0時刻由S波段雷達(dá)觀測到運(yùn)動目標(biāo)的量測為(r0a0e0)T,其中,r0為距離量測值,a0為方位角量測值,e0為俯仰角量測值;t1時刻由X波段雷達(dá)觀測到運(yùn)動目標(biāo)的量測為(r1a1e1)T。假設(shè)目標(biāo)做勻速直線運(yùn)動,t0時刻的初始狀態(tài)為X0=(x0,y0,z0,vx0,vy0,vz0)T,其中,x0、y0、z0分別為直角坐標(biāo)系下運(yùn)動目標(biāo)的位置坐標(biāo),vx0、vy0、vz0分別為直角坐標(biāo)系下運(yùn)動目標(biāo)的速度分量。按照勻速直線運(yùn)動模型,在t1時刻運(yùn)動目標(biāo)狀態(tài)X1=(x1,y1,z1,vx1,vy1,vz1)T中各分量可表示為
x1=x0+(t1-t0)vx0
(3)
y1=y0+(t1-t0)vy0
(4)
z1=z0+(t1-t0)vz0
(5)
vx1=vx0
(6)
vy1=vy0
(7)
vz1=vz0
(8)
設(shè)定S波段雷達(dá)和X波段雷達(dá)同址分布(忽略兩部雷達(dá)間實(shí)際距離)。由式(1)可以推導(dǎo)出兩部雷達(dá)帶走動系數(shù)的量測方程,式(1)中徑向速度v可表示為距離r對時間的導(dǎo)數(shù),即v=dr/dt。因此,可以得出t0時刻和t1時刻S波段雷達(dá)和X波段雷達(dá)的兩組量測方程
(9)
(10)
(11)
(12)
(13)
(14)
式中:(εrS,εaS,εeS)為S波段雷達(dá)在距離、方位角和俯仰角上的量測隨機(jī)誤差,且滿足
E[(εrS,εaS,εeS)T(εrS,εaS,εeS)]=
(15)
式中:σrS、σaS、σeS分別表示S波段雷達(dá)在距離、方位角、俯仰角上隨機(jī)誤差的標(biāo)準(zhǔn)差。與S波段雷達(dá)相對應(yīng),(εrS,εaS,εeS)為X波段雷達(dá)的隨機(jī)誤差,且滿足
E[(εrX,εaX,εeX)T(εrX,εaX,εeX)]=
(16)
式中:σrX、σaX、σeX表示X波段雷達(dá)在距離、方位角、俯仰角上隨機(jī)誤差的標(biāo)準(zhǔn)差。
運(yùn)動目標(biāo)初始狀態(tài)X0=(x0,y0,z0,vx0,vy0,vz0)T為需要求解的未知量,包含六個未知數(shù),利用式(3)~式(8)對式(9)~式(14)進(jìn)行化簡,消去X1中的分量,得到關(guān)于X0的六個方程。接著,可以根據(jù)t0時刻和t1時刻的兩組量測,即式(9)~式(14)對運(yùn)動目標(biāo)的初始狀態(tài)進(jìn)行求解。
2 目標(biāo)初始狀態(tài)求解
t0時刻和t1時刻兩組量測的六個方程為非線性方程組,本文采用加權(quán)最小二乘法(高斯-牛頓迭代法)對式(9)~式(14)求解,但仍需要選取合適的初值。可以通過假定λS、λX、εrS、εaS、εeS、εrX、εaX、εeX=0求解迭代初值,即
x0=r0cosa0cose0
(17)
y0=r0sina0cose0
(18)
z0=r0sine0
(19)
vx0=(r1cosa1cose1-x0)/(t1-t0)
(20)
vy0=(r1sina1cose1-y0)/(t1-t0)
(21)
vz0=(r1sine1-z0)/(t1-t0)
(22)
求出迭代初值后,再以x0、y0、z0、vx0、vy0、vz0為變量求出式(9)~式(14)的雅克比矩陣
(23)
得出目標(biāo)初始狀態(tài)的高斯-牛頓迭代公式[12]

(24)
式中:X′n為六維列向量,是第n次迭代求得的目標(biāo)狀態(tài)向量,且X′n已通過式(17)~式(22)得出;R為6×6維的量測噪聲矩陣;Q為目標(biāo)量測值;h(X′n)可以通過式(9)~式(14)求出。通過式(24),不僅可以求得目標(biāo)初始狀態(tài)的估計,也可以對目標(biāo)初始協(xié)方差矩陣進(jìn)行估計,即P0=(JTR-1J)-1。
本節(jié)通過高斯-牛頓迭代法對運(yùn)動目標(biāo)的初始狀態(tài)和量測方程的初始協(xié)方差矩陣進(jìn)行估計,在此基礎(chǔ)上,下文將通過卡爾曼濾波算法對t2時刻的目標(biāo)量測值和協(xié)方差矩陣進(jìn)行外推,接著與t2時刻真實(shí)量測相結(jié)合,利用相關(guān)波門對運(yùn)動目標(biāo)進(jìn)行航跡起始。
3 雙波段雷達(dá)航跡起始
按照勻速直線運(yùn)動模型,t2時刻目標(biāo)的狀態(tài)轉(zhuǎn)移矩陣為
(25)
利用第二節(jié)求得的目標(biāo)初始狀態(tài)X0和初始協(xié)方差矩陣P0,外推t2時刻的目標(biāo)量測值和協(xié)方差矩陣,得
X2=FX0
(26)
P2=FP0FT
(27)
k+1時刻量測的預(yù)測值為
Z(k+1/k)=h(k+1,X(k+1/k))
(28)
k+1時刻預(yù)測量測協(xié)方差矩陣為
(29)
式中:h()和hx()分別表示k+1時刻的量測方程及其雅克比矩陣。
通過式(28)、式(29)可以得到t2時刻的估計量測Z(t2/t0)和估計協(xié)方差矩陣P(t2/t0),且該時刻由S波段雷達(dá)觀測到的目標(biāo)量測值為Z(t2)。根據(jù)文獻(xiàn)[13],選取橢圓波門作為起始波門,可以得出雙波段雷達(dá)的航跡起始判別依據(jù)
vT(t2)S(t2)-1v(t2)≤γ
(30)
式中:v(t2)表示t2時刻的新息,且v(t2)=Z(t2)-Z(t2/t0);S(t2)為t2時刻的新息協(xié)方差,且S(t2)=P(t2/t0)+R(t2),R(t2)為t2時刻的量測噪聲。參數(shù)γ滿足χ2分布(卡方分布),其大小的選擇可以根據(jù)χ2分布表查得。至此,本文給出了有關(guān)雙波段雷達(dá)航跡起始的具體方法,總結(jié)歸納如圖1所示。
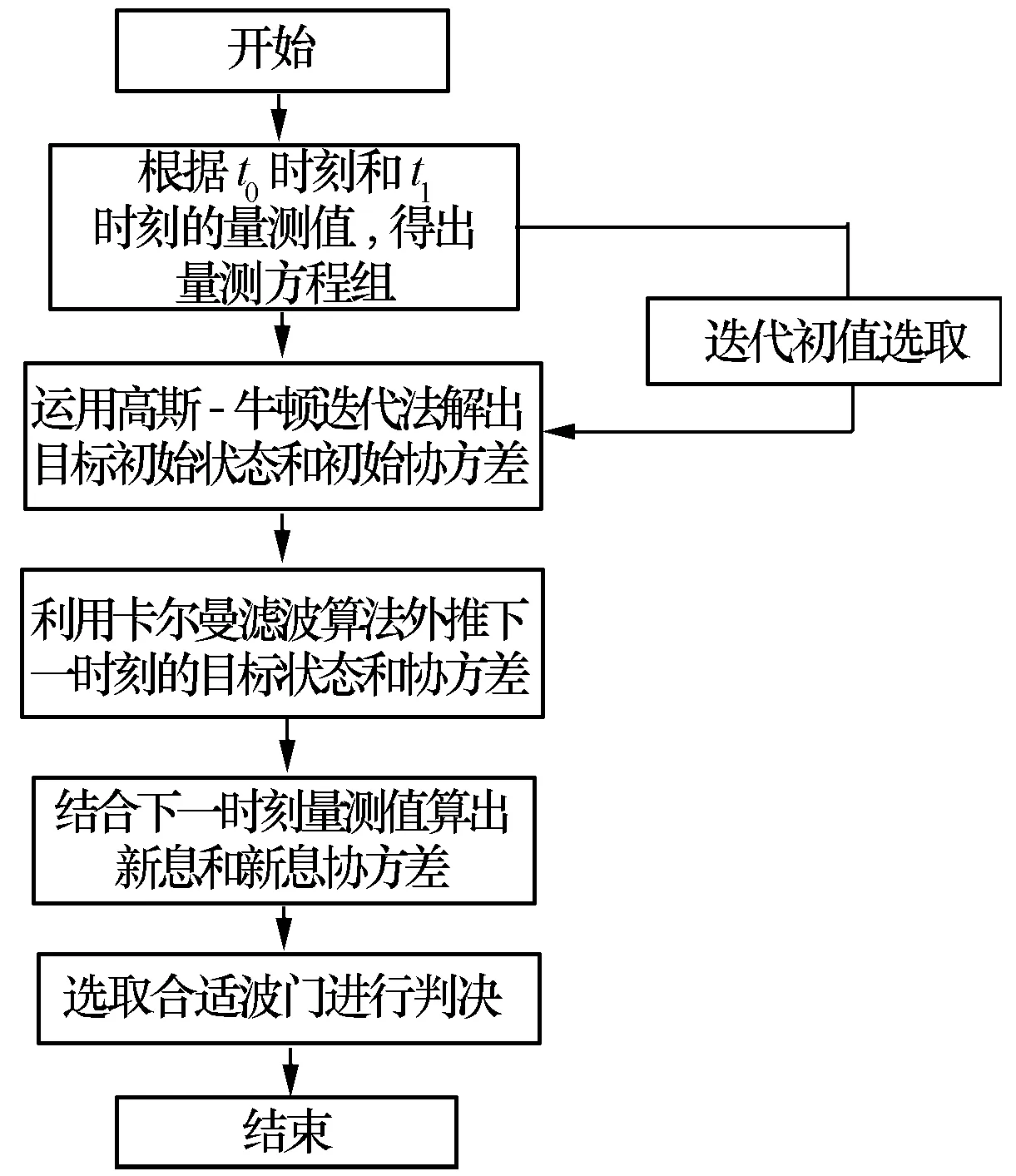
圖1 雙波段雷達(dá)航跡起始
首先,根據(jù)t0時刻S波段雷達(dá)和t1時刻X波段雷達(dá)兩組量測值得到有關(guān)目標(biāo)初始狀態(tài)的六個非線性方程,即式(9)~式(14);其次,假設(shè)λS、λX、εrS、εaS、εeS、εrX、εaX、εeX=0求解式(9)~式(14),得到下一步的迭代初值,即式(17)~式(22);接著,利用高斯-牛頓迭代式(24)解出目標(biāo)的初始運(yùn)動狀態(tài)和初始量測協(xié)方差矩陣,其迭代次數(shù)由雷達(dá)量測精度和計算機(jī)處理性能決定;然后,結(jié)合卡爾曼濾波算法對t2時刻的量測和量測協(xié)方差矩陣進(jìn)行外推,即式(25)~式(29),并與該時刻實(shí)際量測相結(jié)合,算出量測新息和新息協(xié)方差;最后,依據(jù)航跡起始判別式(30)進(jìn)行判決,得出結(jié)論,航跡起始結(jié)束。
4 仿真
仿真中,設(shè)定雙波段雷達(dá)量測方程中隨機(jī)誤差滿足高斯分布,且S波段雷達(dá)距離誤差σrS=10 m,方位角誤差σaS=0.3,俯仰角誤差σeS=0.4,多普勒耦合系數(shù)λS=1.92 s;X波段雷達(dá)距離誤差σrX=12.24 m,方位角誤差σaX=0.2,俯仰角誤差σeX=0.2,多普勒耦合系數(shù)λX=5.76 s。以雙波段雷達(dá)為坐標(biāo)原點(diǎn)的目標(biāo)運(yùn)動方程為
(31)
S波段和X波段量測點(diǎn)跡等時間間隔分布,即Δt=t2-t1=t1-t0=1 s;按照本文方法得出目標(biāo)t0、t1、t2時刻點(diǎn)跡并與未修正距離多普勒耦合的常規(guī)方法得到的量測點(diǎn)跡進(jìn)行對比,結(jié)果如圖2所示。
由圖2可以看出,由于雙波段雷達(dá)的多普勒耦合系數(shù)不同,在點(diǎn)跡融合時,不同波段雷達(dá)測量得到的點(diǎn)跡位置會產(chǎn)生一定偏差,影響航跡起始的準(zhǔn)確率,進(jìn)而無法完成目標(biāo)定位和跟蹤。采用本文方法對多普勒耦合系數(shù)進(jìn)行修正,得出的點(diǎn)跡與目標(biāo)真實(shí)點(diǎn)跡基本吻合。在此基礎(chǔ)上進(jìn)行航跡起始,蒙特卡洛仿真結(jié)果(航跡起始成功率)如表2所示,γ為卡方分布參數(shù)。
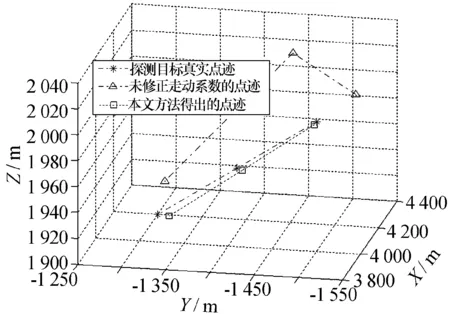
圖2 運(yùn)動目標(biāo)t0、t1、t2時刻點(diǎn)跡位置

γ取值1234常規(guī)方法000.020.05本文方法0.560.820.940.99
表2中數(shù)據(jù)表明:本文提出的基于線性調(diào)頻信號的雙波段雷達(dá)航跡起始方法可以解決不同波段多普勒耦合系數(shù)給目標(biāo)航跡起始帶來的困難,有效提高運(yùn)動目標(biāo)航跡起始的成功率。
5 結(jié)束語
當(dāng)探測目標(biāo)存在徑向速度時,采用線性調(diào)頻技術(shù)的雷達(dá)回波會發(fā)生多普勒耦合。因雙波段雷達(dá)工作頻率的不同,使其具有不同的多普勒耦合系數(shù),造成航跡起始準(zhǔn)確率較低,甚至無法起始,給目標(biāo)跟蹤帶來困難。為解決該問題,本文首先分析了多普勒耦合對距離量測的影響,并結(jié)合S波段雷達(dá)和X波段雷達(dá),推導(dǎo)出帶有多普勒耦合系數(shù)的雙波段雷達(dá)非線性量測方程組,選取合適初值并利用加權(quán)最小二乘法解算目標(biāo)初始運(yùn)動狀態(tài);然后,提出了雙波段雷達(dá)航跡起始的3/3準(zhǔn)則,并進(jìn)行了總結(jié)歸納,給出了基于線性調(diào)頻信號的雙波段雷達(dá)航跡起始方法;最后,相關(guān)仿真表明了本文方法可以有效提高雙波段雷達(dá)航跡起始的準(zhǔn)確率。對于工程中多目標(biāo)和雜波區(qū)的航跡起始,可以在本文方法的基礎(chǔ)上,通過最近鄰或多假設(shè)方法解決。
[1]向敬成, 張明友.雷達(dá)系統(tǒng)[M].北京:電子工業(yè)出版社,2001.
XIANG Jingcheng, ZHANG Mingyou.Radar systems[M].Beijing:Publishing House of Electronics Industry,2001.
[2]趙敏, 吳衛(wèi)山. 線性調(diào)頻信號特性分析[J]. 航空兵器,2009(1): 25-29.
ZHAO Min,WU Weishan.Analysis of linear frequency modulated signal[J].Aero Weaponry,2009(1): 25-29.
[3]BRENNER T, KUSCHEL H, OLSEN K E. Multiband radar modeling[C]// 2006 International Radar Symposium. Krakow, Poland: IEEE Press, 2006: 1-7.
[4]FONTANA W J, KRUEGER K H. AN/SPY-3: the navy's next-generation force protection radar system[C]// 2003 IEEE International Symposium on Phased Array Systems and Technology. [S.l.]: IEEE Press, 2003: 594-603.
[5]吳永亮. 美國海軍艦載雙波段系列雷達(dá)的發(fā)展[J]. 國防科技, 2012, 33(4): 14-20.
WU Yongliang.The development of US navy′s dual band radar family[J].National Defense Science and Technology, 2012, 33(4): 14-20.
[6]WONG W K, BLAIR W D. Steady-state tracking with LFM waveforms[J]. IEEE Transactions on Aerospace & Electronic Systems, 2000, 36(2): 701-709.
[7]王建國,何佩琨,龍騰.徑向速度測量在Kalman濾波中的應(yīng)用[J].北京理工大學(xué)學(xué)報,2002,22(2):226-228.
WANG Jianguo,HE Peikun,LONG Teng.Use of radial velocity measurements in Kalman filter[J].Journal of Beijing Institute of Technology,2002,22(2):226-228.
[8]ABATZOGLOU T J, GHEEN G O. Range, radial velocity, and acceleration MLE using radar LFM pulse train[J]. IEEE Transactions on Aerospace & Electronic Systems, 1998, 34(4):1070-1083.
[9]趙鋒,王雪松,肖順平.高耦合系數(shù)條件下徑向速度估計的新方法[J].電子學(xué)報,2005,33(9):1571-1575.
ZHAO Feng,WANG Xuesong,XIAO Shunping.A new method of radial velocity estimation for hish coupling coefficient[J].Acta Electronica Sinica,2005,33(9):1571-1575.
[10]康麗艷, 蘇濤, 牛亞莉. 基于正負(fù)斜率線性調(diào)頻脈沖信號的一種新的測速方法[J]. 火控雷達(dá)技術(shù), 2006, 35(9): 14-18.KANG Liyan,SU Tao,NIU Yali.A new algorithm of measuring velocity based on chirp up and chirp down signals[J].Fire Control Radar Technology, 2006, 35(9): 14-18.
[11]俸玉祥, 林基明, 鄭霖. 基于正負(fù)斜率調(diào)頻多帶Chirp信號的移動目標(biāo)參數(shù)估計[J]. 重慶郵電大學(xué)學(xué)報(自然科學(xué)版), 2014, 26(3): 339-345.FENG Yuxiang,LIN Jiming,ZHENG Lin.Parameters estimation of a moving target with multi-band chirp signal[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2014, 26(3): 339-345.
[12]王建衛(wèi). 分布式雷達(dá)系統(tǒng)誤差修正[J]. 現(xiàn)代雷達(dá), 2011, 33(11): 52-55.
WANG Jianwei.A registration algorithm for distributed radars system[J]. Modern Radar,2011, 33(11): 52-55.
[13]何友,修建娟,張晶煒,等.雷達(dá)數(shù)據(jù)處理及應(yīng)用[M].北京:電子工業(yè)出版社,2006.
HE You,XIU Jianjuan,ZHANG Jingwei,et al.Radar data processing with applications[M].Beijing:Publishing House of Electronics Industry,2006.
[14]喬慧, 戴霄. 一種多雷達(dá)多目標(biāo)抗系統(tǒng)誤差航跡起始方法[J]. 火力與指揮控制, 2014, 39(2): 98-100.
QIAO Hui,DAI Xiao.An approach of multi-target track initiation in multi-radar net with system bias[J]. Fire Control & Command Control, 2014,39(2): 98-100.
[15]湯兵. P波段多雷達(dá)點(diǎn)跡融合精度分析[J]. 現(xiàn)代雷達(dá), 2014, 36(3): 6-10.
TANG Bing.Analysis of point fusion precision for multiple P-band radars[J]. Modern Radar,2014, 36(3): 6-10.
鄭嘯宇男,1990年生,碩士研究生。研究方向為雷達(dá)數(shù)據(jù)處理、目標(biāo)跟蹤等。
王建衛(wèi)男,1974年生,博士,研究員級高級工程師。研究方向為雷達(dá)數(shù)據(jù)處理、數(shù)據(jù)融合等。
The Algorithm of Track Initiation for Dual-band Radar Based on LFM Signal
ZHENG Xiaoyu,WANG Jianwei
(Nanjing Research Institute of Electronics Technology, Nangjing 210039, China)
The signal using linear frequency modulation technology is an important pulse compression signal. Because of its various excellent properties, it has been widely used in the actual engineering project. As a result of carriers at different frequencies, chirp signals will have different range-Doppler coupling coefficient. After the pulse compression, the ranging error caused by dual-band radar will make track initiation difficult. In order to deal with this problem, this article explains the influence of different range-Doppler coupling coefficient in the measurement of the dual-band radar, and exports the nonlinear equations of the dual-band radar measurement. Then the weighted least squares (Gauss-Newton iteration) algorithm is applied to calculate the initial state of moving radar target. Finally, the algorithm of track initiation for the dual-band radar based on LFM signal is proposed. Monte-Carlo simulation results show that this method can effectively improve the accuracy rate of moving target track initiation when the radar works under different wavelengths mode.
linear frequency modulation; dual-band radar; track initiation; range-Doppler coupling
10.16592/ j.cnki.1004-7859.2016.08.013
鄭嘯宇Email:15996256971@163.com
2016-04-26
2016-06-29
TN957.52
A
1004-7859(2016)08-0054-05