水下探測中繼平臺系統研究
2016-09-07 06:23:15隋元杰王耀賓崔志光
聲學技術 2016年1期
隋元杰,王耀賓,崔志光
?
水下探測中繼平臺系統研究
隋元杰,王耀賓,崔志光
(中國科學院聲學研究所北海研究站,山東青島 266023)
水下升降中繼控制系統能夠依照控制策略實現天線倉的升降過程,通過水聲通信機、衛星天線實現潛標與遠程指揮機的周期性數據上傳及指令下載。設計了系統的結構與通信方案,解決了水下小型排纜絞車、深水直流小功率電機、升降控制策略及通信協議等關鍵技術問題。介紹了錨系系統設計方案、工作流程、每個結構部分的功能需求及系統應用;通過預先設定的中繼控制倉時間表,控制天線倉的升降,完善可靠的升降控制過程及通信協議,為系統功能的實現提供了條件。
中繼平臺;潛標;控制系統;水下探測
0 引言
海洋定點數據的采集是一個長期連續的過程,水下信息收集設備如潛標,能獲取水下不同深度的長期連續的數據,由于它的浮體一般位于水面以下,因此具有很好的安全性和隱蔽性[1]。
然而,由于工作在水面以下,水下探測設備與遠程岸基之間的數據實時交換受到制約[2],為了改善水下探測及信息收集系統數據的實時通訊性能,經過多次試驗、改進,設計出一套實用水下探測中繼平臺系統。該平臺系統能夠搭載水聲設備,能夠存儲、處理設備數據,使用水下絞車機械裝置收放繩纜,控制天線倉的升降,實現水下設備與遠程岸基之間的數據交換。
1 設計方案及結構
1.1 系統整體設計方案
中繼平臺系統(結構示意圖1)主要包括:衛星天線倉、平臺浮體及升降裝置、中繼控制倉三部分。
潛標系統整體通過釋放器與重塊連接,錨碇在海底。平臺浮體及升降裝置可以工作于水深100 m以下,中繼控制倉與潛標之間采用線纜進行通信,與天線倉之間采用水聲通信機進行通信。水下小型排纜絞車與衛星天線倉之間用細繩連接,通過收放細繩進而實現衛星天線倉的升降。由于電池電量的限制,潛標系統在水下的最長工作時間為一個月,工作任務設為每天升降一次并完成各種指令及數據的通信。
在非數據通信工作時間內,系統隱藏在海面以下,具有隱蔽性,到達預設上浮工作時間時,中繼控制倉喚醒天線倉并根據一定的控制策略控制電機工作,從而將天線倉釋放出海面。天線倉露出海面后,如果姿態不平穩可以通過水聲通信機給中繼倉發指令,請求繼續放纜;之后天線倉可以跟岸基指揮機通過衛星進行指令及數據信息通信,潛標及中繼平臺的信息也可以通過水聲通信機上傳至天線倉。完成通信后,天線倉進入休眠狀態;當中繼倉時間表回收時間到,中繼倉控制電機轉動將天線倉回收到一定的深度并等待下一次任務。
衛星天線倉配備有浮體及衛星天線,獨立電池供電,能夠掛載CTD,水聲通信機,也可以掛載各種自容式設備,升降過程中測試各種海洋環境參數的周期變化規律,衛星天線倉需要進行配重調整,使其露出海面后能夠保持比較好的姿態以便進行衛星通信;平臺浮體及升降裝置主要包括:不銹鋼框架結構,深水浮體材料,水密電機,水下小型排纜絞車和其他機械傳動裝置,以及水下鋰電池組等;水下鋰電池為單體不銹鋼密封殼體結構,電量為24V70AH,可以將水下鋰電池并聯連接增大儲備電量,可以同時給電機、中繼控制倉、CTD及水聲通信機供電;中繼控制倉主要為一套電路系統,根據通信協議存儲轉發指令及數據,并可以根據策略控制電機的正反轉實現天線倉升降,可以掛載CTD,及其他水聲設備。
1.2 衛星天線倉設計
圖2為衛星天線浮體露出水面的姿態圖,采用圓柱型浮體結構,電子倉安裝在浮體中間,使重心保持較低,當露出水面進行無線電通信時,天線倉保持較好的動態穩定性。
天線倉內安裝有一套衛星通信電路,能處理多種外設數據。同時天線倉具備衛星信標的功能,當潛標系統浮出海面,或者出現異常,天線倉在非設定時間內露出海面,均可以自動連續向指揮機發送定位信息,報告所處的位置坐標。圖3是2015年1月湖試測試的天線倉深度隨時間變化曲線。
1.3 絞車及升降機械設計
驅動電機為自行設計加工的深水直流小功率電機,電機輸出功率為30 W,供電電壓為24 V,額定電流為2.2 A。可以驅動水下小型排纜絞車,最大驅動負載為30 kg。電機帶停電制動功能,可以防止絞車在天線倉正浮力的作用下轉動,導致天線倉異常浮出海面。
水下小型排纜絞車采用新穎的結構形式。電機驅動齒輪轉動的過程中,絲杠推動纜筒在滑動軸上做往復運動,同時滑動軸驅動纜筒做旋轉運動,而出纜口的位置保持不動,始終處在絞車的中間部位。這樣可以將纜筒限制在較小的空間里,纜繩在不受力的情況下不容易松動纏繞。絞車采用不銹鋼材料加工,齒輪為尼龍材質,旋轉活動部位均采用陶瓷軸承結構,減小了滾動摩擦力,同時具有耐腐蝕的作用。絞車結構如圖4所示,圖5是絞車的實物圖片。
圖4 絞車結構示意圖
Fig.4 Schematic diagram of winch structure
由于需要長期工作于水下,為了防止海生物的附著生長,可以將絞車整體用不銹鋼薄板外殼罩住,只保留出纜孔,這樣在基本密閉的空間內可以有效防止海生物附著生長。
在上浮的過程中,絞車在天線倉正浮力的拉力下,電流很小,為0~0.2 A;在回收天線倉的過程中,電流會比較大,特別是天線倉入水的過程中,由于受到海水阻力、海流以及海面涌浪的影響,會出現電流比較大的情況,入水之后同樣也會受到海流和海水阻力的影響。為了防止長時間過載,中繼控制模塊會根據控制策略,進行過流保護,如2015年湖試過流保護參數為2 A,大于2 A會停機保護,間隔一段時間并多次嘗試回收天線倉。
1.4 中繼控制單元設計
中繼倉結構如圖6所示,采用MSP430處理器,具有4通道外圍通信能力,具有RTC時鐘單元[3-4],外擴1 G Flash存儲電機驅動及能耗測量部分。由于需要長期工作于水下,能耗是至關重要的問題;每天大部分時間處于非工作狀態,在此期間系統處于休眠狀態。其他掛載設備也是需要工作期間才供電,非工作期間則斷電處理。盡量減少電量浪費。
中繼控制倉起著承上啟下的重要作用,向下通過線纜與水下潛標倉進行通信,向上通過水聲通信機與天線倉進行通信。能夠將接收到的潛標數據經水聲通信、衛星天線上傳至遠程岸基;遠程岸基指令經衛星、衛星天線至水聲通信機,信息經中繼控制倉解析,指令下載到潛標中。同時中繼控制倉可以檢測自身深度的變化,并根據時間表控制電機的轉動實現天線倉的升降過程。中繼控制倉在系統中具備很好的獨立性,可以根據控制策略自行判斷并實現升降過程,以及放纜、回收任務。另外中繼控制倉兼有水下平臺作用,具有多個接口能夠掛載多種水下儀器及傳感器。
1.5 通信及控制
通訊結構設計中包括地面指揮機、天線倉、中繼控制倉和潛標電子倉。其中地面指揮機與天線倉之間使用衛星通訊方式,天線倉與中繼控制倉之間使用RS232接口的水聲通訊機通訊,中繼控制倉與潛標電子倉之間為RS422/485方式的線纜連接通訊方式。
為了實現單元間的可靠通信,高效合理的通信協議是至關重要的,本設計根據實際情況結合前期經驗,制定了一套通信協議。經實測能夠很好地應用于本系統。其中幾項關鍵內容點如下:
(1) 基本數據幀格式
圖7為基本數據幀格式。傳輸報文以啟動字符開始,以結束字符作為報文結束。數據幀中包含收發方的地址,便于本單元判別、解析、執行或轉發。
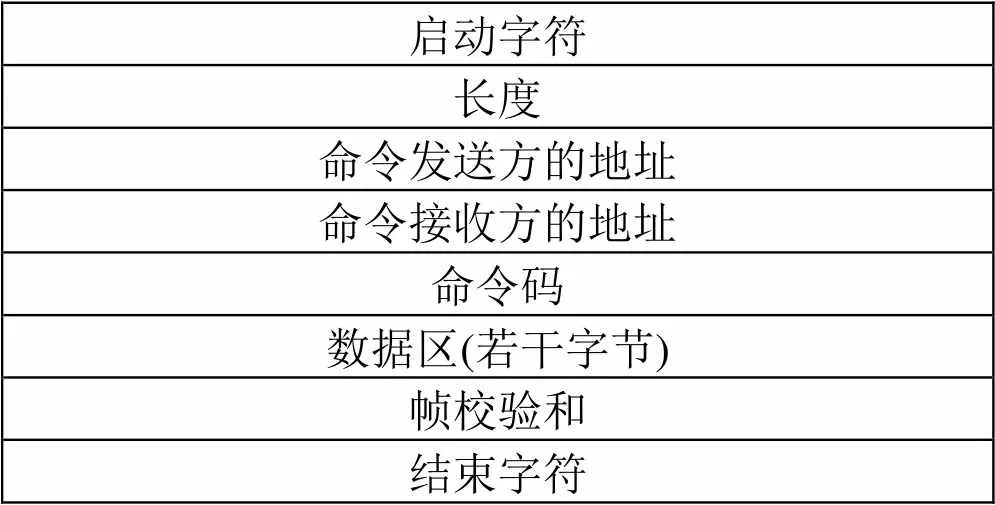
啟動字符 長度 命令發送方的地址 命令接收方的地址 命令碼 數據區(若干字節) 幀校驗和 結束字符
(2) 上行下行定義
下行:地面指揮機→天線倉→中繼倉→潛標
上行:潛標→中繼倉→天線倉→地面指揮機
(3) 指令應答方式
為了增加通信的可靠性,每條指令都采取應答的通信方式。
其中,天線倉與中繼倉之間以北斗方式進行通信,考慮到天線倉在海面姿態等因素,尤其要注意通信的可靠性。
下行的指令傳輸過程中,命令發起方發送指令后,接收方會發送指令應答。若在一定時間內,命令發起方沒有收到指令應答,則認為發送失敗,重新發送指令,最多重發一次。若仍發送失敗則記錄為異常狀態,通過上行通道向地面指揮機報告(當天線倉位于水面時)。
(4) 通信指令
升降控制通訊協議中包括通訊命令格式,主要通訊命令包括:狀態申請、深度查詢、參數更改、任務時間表更改及讀取、定位信息獲取等。
2 系統應用
本文設計的水下探測中繼平臺系統前期進行過相應的測試,并于2015年進行了湖試,圖8是千島湖70 m深段,一個升降周期的電流曲線。
經測試,在天線倉凈浮力為13 kg的情況下,一個升降來回耗電量為0.2 Ah;上浮過程電流為0.2~0.5 A,回收過程電流為0.8~1.7 A。負載為20 kg情況下,一個升降來回耗電量為0.35 Ah;上浮過程電流為0.1~0.5 A,回收過程電流為0.8~2.5 A。天線倉最大深度為40 m,升降速度約為6.5 m/min。
3 結語
本文設計的系統具有一定的通用性,能夠滿足海洋定點數據的存儲、處理,能夠以升降天線的方式,采用衛星通信的方式,將潛標數據上傳到遠程岸基,同時接收下達岸基任務。也可以通過使用該系統實現海洋定點海洋環境參數的長期周期性測量并可以實現實時監測。
[1] 周陽. 海洋定點監測升降式浮標控制系統研制[D]. 杭州: 杭州電子科技大學, 2012, 12: 1-2.
ZHOU Yang. The design of lift buoy control system for marine fixed-poin data monitoring[D]. Hangzhou: Hangzhou Dianzi University, 2012, 12: 1-2.
[2] 夏凡壹. 海底觀測網岸基數據局域網的設計與實現[D]. 杭州: 浙江大學, 2013: 2-5, 11-12.
XIA Fanyi. The design and implementation of shore local area network data system of seafloor observatory[D]. Hangzhou: Zhejiang University, 2013: 2-5, 11-12.
[3] Texas Instruments.MSP430x5xx and MSP430x6xx Family User’s Guide[EB/OL].2008-6[2014-6].http://www.ti.com.cn/product/cn/msp430f5438
[4] Texas Instruments. MSP430F543xA, MSP430F541xA Mixed-Signal Microcontrollers(Rev.E)[EB/OL]. 2010-1[2014-10]. http://www.ti.com/product/msp430f5438a
Study of relay console system for underwater detection
SUI Yuan-jie, WANG Yao-bin, CUI Zhi-guang
(Qingdao Acoustics Laboratory, Institute of Acoustics, Chinese Academy of Sciences, Qingdao 266023, Shandong, China)
The underwater lifting relay control system can implement the process of antenna lifting according to control parameters. The periodic data transmission and instruction downloading from submerged buoy to remote command module can be executed by underwater communications equipment and satellite antenna. The systemic structure and corresponding scheme are designed. The key technical problems on underwater mini-winch for laying cable, deepwater low-power DC generator, lifter controlling parameters and communication protocols are solved. The design scheme and working flow in the anchor system are introduced, the functional requirements for structure sections and the system applications are also recommended. The antenna lifter can be controlled by a pre-established relay console schedule. The perfect manipulative process and communication protocol can provide the conditions for achieving the system functions.
relay console, submerged buoy, control system, underwater detection
TB533
A
1000-3630(2016)-01-0011-04
10.16300/j.cnki.1000-3630.2016.01.003
2015-01-19;
2015-04-30
中國科學院聲學研究所所長擇優基金項目
隋元杰(1981-), 男, 山東萊陽人, 工程師, 研究方向為水聲實驗技術研究及海試設備的研制。
隋元杰, E-mail: suiyuanjie@mail.ioa.ac.cn
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:28
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
北京航空航天大學學報(2017年5期)2017-11-23 05:54:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
衛星與網絡(2016年12期)2016-02-05 09:23:28