基于h/q分解和貝葉斯迭代分類的跑道檢測算法
2016-09-07 01:09:06石慶研
系統(tǒng)工程與電子技術(shù) 2016年9期
韓 萍, 常 玲, 程 爭, 石慶研
(中國民航大學(xué)智能信號(hào)與圖像處理天津市重點(diǎn)實(shí)驗(yàn)室, 天津 300300)
?
基于h/q分解和貝葉斯迭代分類的跑道檢測算法
韓萍, 常玲, 程爭, 石慶研
(中國民航大學(xué)智能信號(hào)與圖像處理天津市重點(diǎn)實(shí)驗(yàn)室, 天津 300300)
提出一種無監(jiān)督分類的機(jī)場跑道檢測方法。首先利用h/q分解對(duì)原圖像中所有像素點(diǎn)進(jìn)行粗分類,建立初始樣本模板;利用初始樣本模板對(duì)原圖像進(jìn)行貝葉斯迭代分類,得到分類圖;結(jié)合跑道的極化散射特性、弱回波特性及形態(tài)學(xué)處理方法,從分類圖中提取出疑似跑道區(qū)域;最終應(yīng)用跑道的結(jié)構(gòu)特征進(jìn)一步辨識(shí)疑似跑道區(qū)域,檢測出真實(shí)機(jī)場跑道目標(biāo)。通過美國UAVSAR系統(tǒng)采集的多組全極化合成孔徑雷達(dá)(synthetic aperture radar,SAR)實(shí)測數(shù)據(jù)驗(yàn)證本文算法的有效性,實(shí)驗(yàn)結(jié)果說明,所提算法能有效、正確地檢測出復(fù)雜場景下極化SAR圖像中的機(jī)場跑道區(qū)域,且結(jié)構(gòu)完整清晰,虛警率低。
h/q分解; 貝葉斯迭代分類; 極化合成孔徑雷達(dá)圖像; 跑道檢測; 極化散射特性
0 引 言
機(jī)場是一種重要的交通設(shè)備和軍用設(shè)備,自身包含著大量信息,其自動(dòng)檢測技術(shù)的研究已日漸成為目標(biāo)檢測領(lǐng)域中的熱點(diǎn)問題。跑道是機(jī)場區(qū)域內(nèi)顯著特征之一,可將對(duì)檢測跑道的研究作為識(shí)別機(jī)場區(qū)域的基礎(chǔ)。現(xiàn)存可查閱的機(jī)場跑道檢測文獻(xiàn)很多,但大多數(shù)方法是應(yīng)用于紅外[1]、光學(xué)[2-6]和傳統(tǒng)單極化合成孔徑雷達(dá)(synthetic aperture radar, SAR)圖像[7-17],涉及全極化SAR圖像的機(jī)場跑道檢測算法很少。與傳統(tǒng)的單極化SAR相比,全極化SAR系統(tǒng)采集的數(shù)據(jù)包含了目標(biāo)的極化散射特性,能夠獲得表征地物目標(biāo)形狀、分布、粗糙度等更為豐富的特征信息。因此利用全極化SAR圖像來研究機(jī)場跑道目標(biāo)的檢測具有很廣闊的應(yīng)用前景。
目前針對(duì)單極化或多極化SAR圖像的跑道目標(biāo)檢測算法可歸結(jié)為兩種:第一種是直接從圖中提取代表跑道的直線作為檢測特征,這種方法對(duì)圖像分辨率要求高且計(jì)算量大,且由于SAR圖像中存在固有相干斑,導(dǎo)致跑道邊緣模糊,影響檢測質(zhì)量;第二種是利用圖像分割或分類的方法,首先提取出疑似跑道的感興趣區(qū)域(region of interest,ROI),然后對(duì)ROI做進(jìn)一步判別,確定出跑道區(qū)域,這種方法計(jì)算量相對(duì)較少,對(duì)圖像細(xì)節(jié)要求較低,但是ROI提取嚴(yán)重依賴前期分割或分類效果的好壞。文獻(xiàn)[18]采用了有監(jiān)督的分類方法提取疑似跑道ROI,這種方法需要利用先驗(yàn)信息,使得其應(yīng)用受到了一定程度的限制。
針對(duì)上述問題,本文提出一種基于h/q分解和貝葉斯迭代分類的無監(jiān)督分類算法進(jìn)行跑道檢測。首先利用h/q分解對(duì)原圖像每個(gè)像素點(diǎn)進(jìn)行分類,提取初始樣本模板;然后利用初始樣本模板,根據(jù)貝葉斯迭代分類方法得到分類圖;再利用跑道的極化散射特性、弱回波特性和形態(tài)學(xué)處理從分類圖中獲得疑似ROI;最終應(yīng)用跑道目標(biāo)的結(jié)構(gòu)特征進(jìn)一步辨識(shí)疑似ROI,檢測出真實(shí)跑道區(qū)域。
1 h/q分解和貝葉斯分類
1.1h/q分解
極化SAR圖像中,地物目標(biāo)的極化散射類型可用極化散射熵H和極化散射角α來表征。文獻(xiàn)[19]提出用參數(shù)h、q替代H、α,參數(shù)h、q計(jì)算公式為
(1)
(2)
式中,Tij為相干矩陣T的第i行j列的值。與H/α平面劃分圖一樣,h/q平面區(qū)域劃分圖也由8個(gè)區(qū)域構(gòu)成,如圖1所示,每個(gè)區(qū)域代表特定的散射機(jī)制類型,其區(qū)域邊界比H/α平面的邊界更穩(wěn)定,且更能準(zhǔn)確地指定地物目標(biāo)的極化散射機(jī)制。

圖1 h/q平面區(qū)域劃分圖Fig.1 Zoning figure of h/q plane
1.2貝葉斯分類
極化相干矩陣T的概率密度分布函數(shù)服從復(fù)Wishart分布[20]:
(3)

貝葉斯分類器是基于貝葉斯準(zhǔn)則,且分類錯(cuò)誤概率最小的分類方法,也是具有最小類間誤差的判別準(zhǔn)則,常將其應(yīng)用于極化SAR圖像地物分類中。這里令Y={ys,s∈S}為待測圖像,X={xs; xs∈{1,2,…,K},s∈S}為整幅圖像中像素點(diǎn)的類別標(biāo)號(hào),K表征類別數(shù),S是待測圖像中所有像素點(diǎn)的集合,并結(jié)合最大后驗(yàn)概率(maximumaposterioriprobability,MAP)準(zhǔn)則,得到貝葉斯分類公式:
(4)
根據(jù)極化相干矩陣T的統(tǒng)計(jì)特征,結(jié)合式(4),可得應(yīng)用于極化SAR圖像分類的貝葉斯分類器:
(5)
2 本文方法
本文利用地物的不同散射特性和物理結(jié)構(gòu)特性,尋求合適的分類方法和判別方法提取機(jī)場跑道區(qū)域。首先利用基于h/q分解和貝葉斯迭代分類的無監(jiān)督分類算法從原圖像中得到分類圖;再利用跑道的極化散射特性、弱回波特性和形態(tài)學(xué)處理,從分類圖中獲得疑似ROI;最終應(yīng)用跑道目標(biāo)的結(jié)構(gòu)特征進(jìn)一步辨識(shí)疑似ROI,檢測出真實(shí)機(jī)場跑道區(qū)域。算法流程圖如圖2所示。
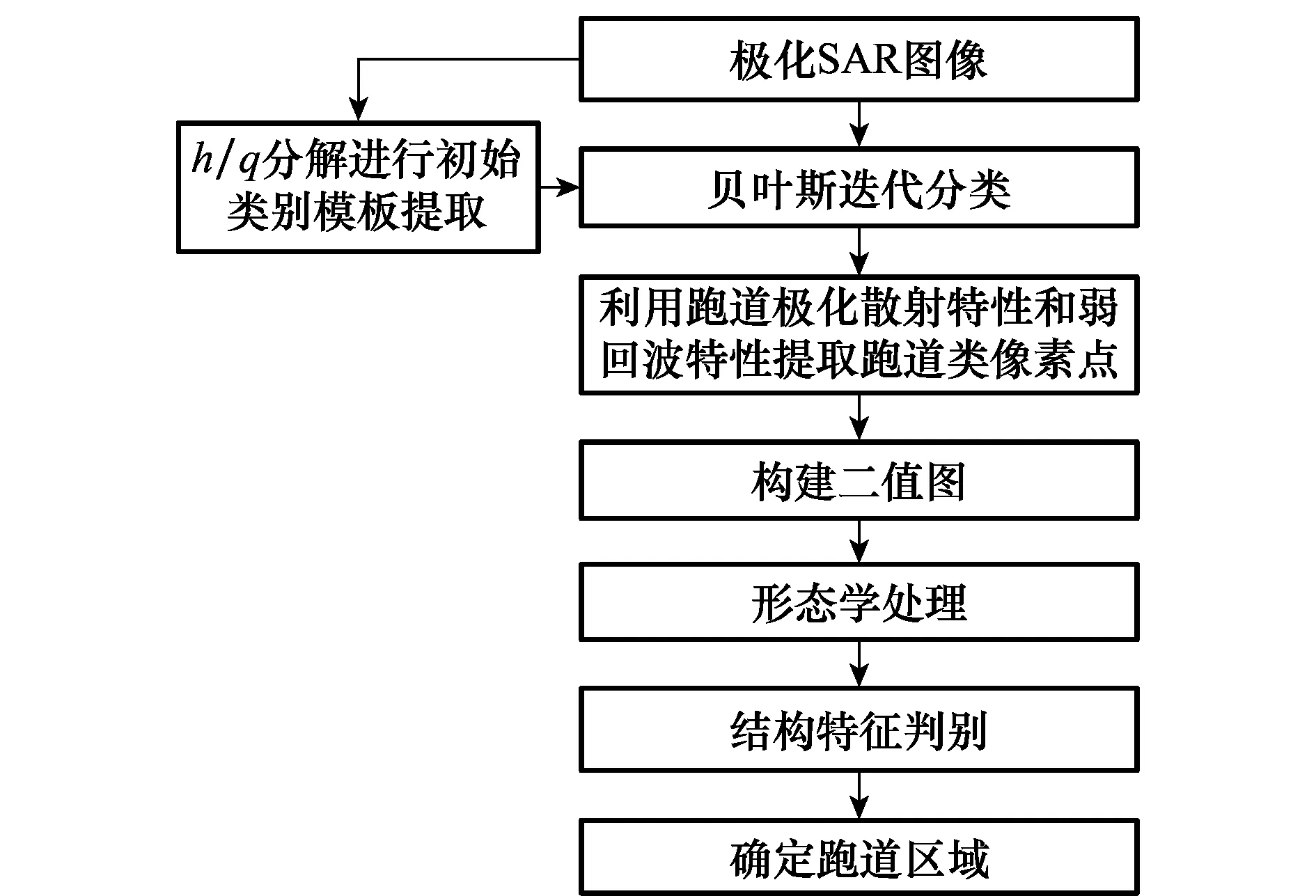
圖2 算法流程圖Fig.2 Flowchart of proposed algorithm
2.1提取初始樣本模板

(6)
式中,Nl是第l類中包含的像素?cái)?shù)目(l=1,2,…,8);Tl,n是第l類第n個(gè)像素點(diǎn)的極化相干矩陣。
2.2貝葉斯迭代分類
結(jié)合貝葉斯分類公式,貝葉斯迭代分類過程如下:


2.3提取跑道類像素點(diǎn)
在極化SAR圖像中,跑道類地物滿足下面兩個(gè)特征:
(1) 跑道類地物的散射機(jī)制類型是中、低熵表面散射;
(2) 跑道表面光滑,回波很弱,即跑道類地物的散射功率span很小。
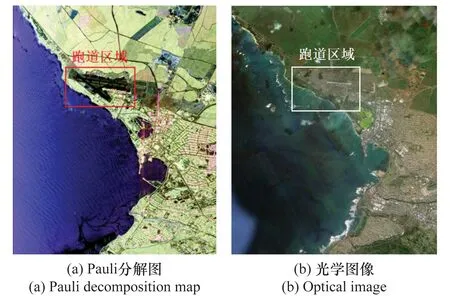
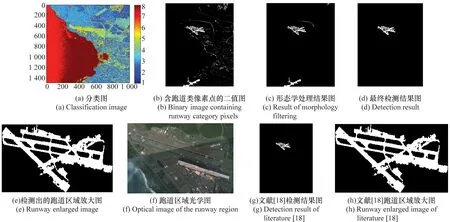
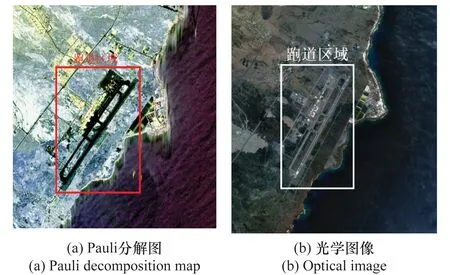
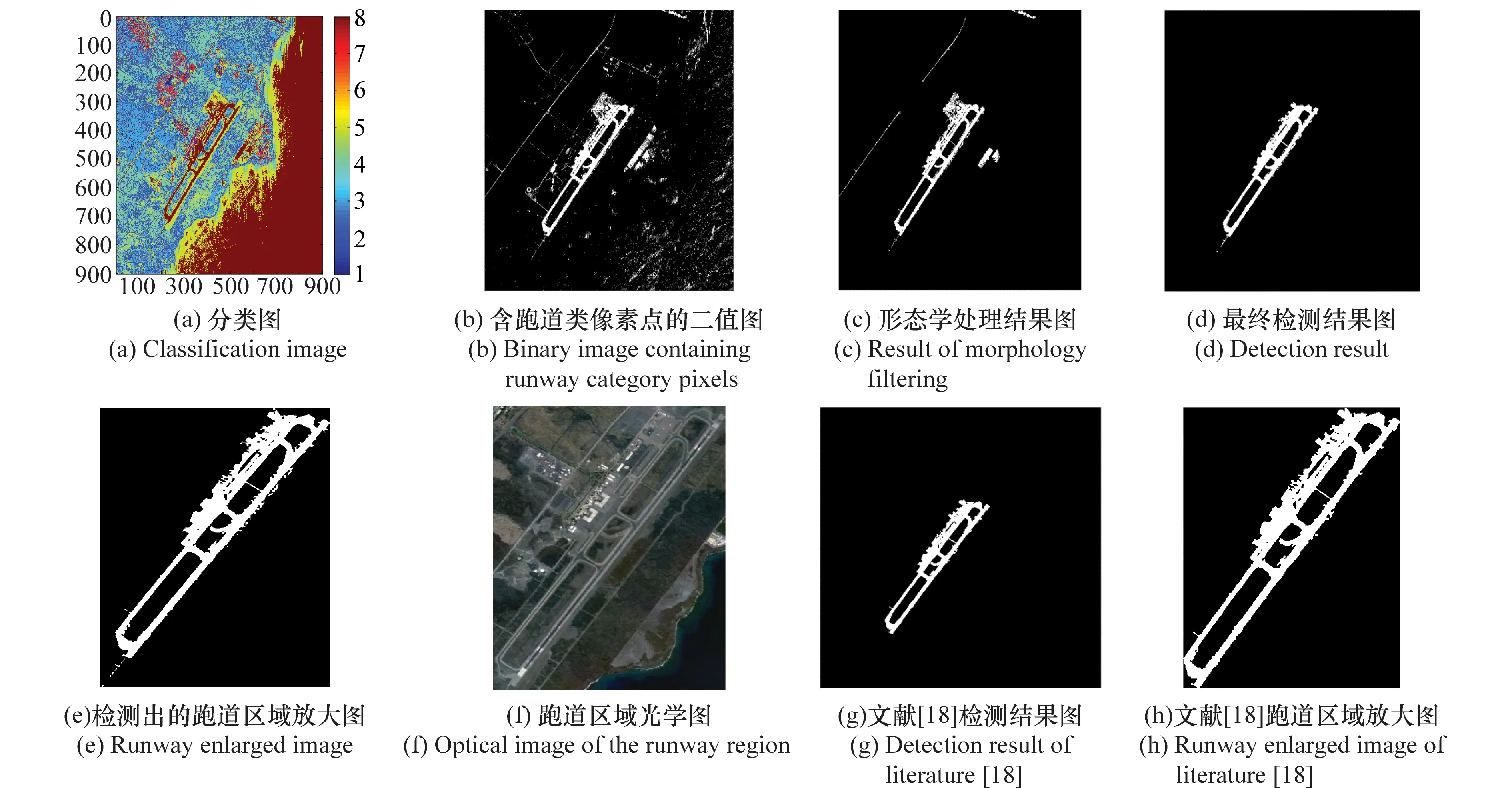
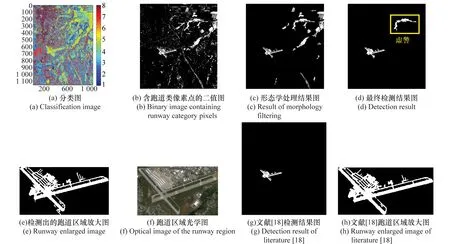
所以可從第2.2節(jié)中的分類結(jié)果圖中提取出散射機(jī)制類型為中、低熵表面散射機(jī)制且散射功率span 2.4形態(tài)學(xué)處理提取疑似跑道區(qū)域 第2.3節(jié)中得到的含有跑道類像素點(diǎn)的二值圖中,包含大量的孤立小區(qū)域(包括離散像素點(diǎn)和不符合跑道尺寸特征的小區(qū)域),為了去除這些孤立小區(qū)域,本文采用形態(tài)學(xué)處理操作,具體步驟如下: 步驟 1由民用機(jī)場跑道尺寸標(biāo)準(zhǔn)[22](跑道長度范圍:900~4 200 m;跑道寬度范圍:18~100 m)和圖像分辨率,可計(jì)算出圖像中最小跑道區(qū)域的面積閾值Th0。 步驟 2對(duì)第2.3節(jié)中得到的二值圖進(jìn)行連通區(qū)域標(biāo)記處理,并計(jì)算出每個(gè)連通區(qū)域中所包含的像素點(diǎn)個(gè)數(shù)Num; 步驟 3將每個(gè)連通區(qū)域的像素點(diǎn)個(gè)數(shù)Num代入式(7),滿足式(7)則將該連通區(qū)域所有像素點(diǎn)置為“0”,否則不作任何處理。 Num (7) 通過上述處理可去除二值圖中大量孤立的小區(qū)域,得到含有疑似跑道區(qū)域的二值圖。 2.5疑似跑道區(qū)域辨識(shí) 機(jī)場跑道有一定的尺寸標(biāo)準(zhǔn)和結(jié)構(gòu)特征,可用這些特征對(duì)各個(gè)疑似跑道區(qū)域進(jìn)行進(jìn)一步辨識(shí),以確定真實(shí)跑道區(qū)域。本文選用了跑道的拓?fù)洹⑵叫芯€以及對(duì)比度特征來判別疑似ROI,具體判別流程圖如圖3所示。 圖3 疑似跑道區(qū)域辨識(shí)流程圖Fig.3 Flowchart of the discrimination of suspected runway areas 下面對(duì)本文中選用的3個(gè)跑道結(jié)構(gòu)特征進(jìn)行詳細(xì)描述: (1) 拓?fù)涮卣鱗17]。拓?fù)涮卣饔脷W拉數(shù)E來表征,歐拉數(shù)E的值等于連通分量個(gè)數(shù)與空洞個(gè)數(shù)的差值。連通分量數(shù)是二值圖中標(biāo)記為“1”的像素點(diǎn)構(gòu)成的連通區(qū)域個(gè)數(shù);空洞數(shù)是指標(biāo)記為“1”的連通區(qū)域中包圍的標(biāo)記為“0”的像素點(diǎn)構(gòu)成的連通區(qū)域的個(gè)數(shù)。跑道區(qū)域中間有很多草坪或裸地構(gòu)成的空洞,因此對(duì)比河流、公路等疑似跑道區(qū)域,跑道的歐拉數(shù)較小。 (2) 平行線特征。平行線特征用平行線對(duì)數(shù)Dis表征。本文檢測出的跑道區(qū)域含有主跑道、副跑道、滑行道和停機(jī)坪,在用Hough變換提取滿足長度要求的長直線后,再用跑道寬度特征提取出滿足要求的平行線對(duì),并計(jì)算平行線對(duì)數(shù)。跑道區(qū)域的平行線對(duì)數(shù)明顯大于河流、公路等疑似跑道區(qū)域。 (3) 對(duì)比度特征。對(duì)比度D等于S1/S2,其中S1表示二值圖中標(biāo)記為“1”的像素點(diǎn)個(gè)數(shù),S2表示二值圖中標(biāo)記為“1”的像素點(diǎn)構(gòu)成的連通區(qū)域內(nèi)包圍的標(biāo)記為“0”的像素點(diǎn)個(gè)數(shù)。由于跑道區(qū)域中含有大塊草坪或裸地區(qū)域,因此跑道區(qū)域的S2值比其他疑似跑道區(qū)域要大,所以對(duì)比度D的數(shù)值較小。 用上述3個(gè)結(jié)構(gòu)特征對(duì)各疑似跑道區(qū)域進(jìn)行辨識(shí),以確定跑道區(qū)域,判別過程如下: (1) 對(duì)上述第2.4節(jié)中得到的疑似跑道區(qū)域進(jìn)行連通區(qū)域標(biāo)記,并計(jì)算出每個(gè)連通區(qū)域的最小外接矩形的尺寸,并利用尺寸結(jié)果對(duì)圖像進(jìn)行裁剪,即可獲得各個(gè)獨(dú)立的疑似跑道區(qū)域; (2) 計(jì)算每個(gè)獨(dú)立疑似跑道區(qū)域的歐拉數(shù)E、平行線對(duì)數(shù)Dis和對(duì)比度D,判斷其是否滿足閾值限制,滿足則不作處理,為真實(shí)跑道區(qū)域,不滿足則將該區(qū)域置為“0”,為非跑道區(qū)域。 通過上述處理后即可確定真實(shí)跑道區(qū)域。 為了驗(yàn)證本文算法的有效性,對(duì)多組含有民用機(jī)場跑道的全極化數(shù)據(jù)進(jìn)行了實(shí)驗(yàn),并與文獻(xiàn)[18]算法的實(shí)驗(yàn)結(jié)果進(jìn)行對(duì)比。本文選擇3個(gè)具有代表性的實(shí)驗(yàn)結(jié)果進(jìn)行分析。 實(shí)驗(yàn) 1實(shí)驗(yàn)數(shù)據(jù)是利用美國UAVSAR系統(tǒng)采集于Hawaii區(qū)域上空L波段全極化數(shù)據(jù),經(jīng)過4視處理。圖像大小為1 500像素×1 000像素,如圖4(a)、圖4(b)所示。場景中除包括Kauluhi機(jī)場區(qū)域外,還有海洋、公路、城區(qū)、草地、田地等地物。圖像方位向和距離向分辨率分別是4.9 m和7.2 m。 實(shí)驗(yàn)參數(shù)設(shè)置如下:散射功率閾值Th為0.01;根據(jù)圖像的分辨率可計(jì)算出形態(tài)學(xué)處理閾值Th0=450;歐拉數(shù)E、平行線對(duì)數(shù)Dis和對(duì)比度D的閾值E0、Dis0、D0分別為0、10、0.4。圖5給出了實(shí)驗(yàn)結(jié)果圖。 圖4 Kahului機(jī)場場景Fig.4 Scenes of Kahului airport 圖5 Kahului機(jī)場場景實(shí)驗(yàn)結(jié)果Fig.5 Results of Kahului airport scenes 由圖5(a)分類圖可以看出,跑道區(qū)域是一種顏色,屬于中熵表面散射,滿足跑道類像素點(diǎn)的散射機(jī)制類型為中低熵表面散射這一特征,為上述第2.3節(jié)中提取跑道類像素點(diǎn)的特征(1)作了論證。圖5(b)是利用跑道類地物的極化散射特性和弱回波特性從分類結(jié)果圖中提取的含有跑道類像素點(diǎn)的二值圖,與圖4比較可知,圖5(b)中包含完整的跑道區(qū)域,說明這兩個(gè)特征是從分類結(jié)果圖中提取跑道區(qū)域的有效特征。圖5(c)是形態(tài)學(xué)處理結(jié)果圖,可以看到,通過形態(tài)學(xué)處理,去除了大量的孤立小區(qū)域(包括離散像素點(diǎn)和不符合跑道尺寸特征的小區(qū)域),大大減少了后期疑似跑道區(qū)域結(jié)構(gòu)判別的計(jì)算量。圖5(d)為最終檢測結(jié)果圖,從圖中可以看出經(jīng)過結(jié)構(gòu)特征判別后,真實(shí)跑道區(qū)域?yàn)楸A粝碌奈ㄒ粎^(qū)域,說明了本方法能完整地檢測出該地區(qū)中的機(jī)場跑道區(qū)域,且無虛警。對(duì)比圖5(e)跑道區(qū)域放大圖和圖5(f)對(duì)應(yīng)的光學(xué)圖,同時(shí)說明,本方法檢測出的跑道區(qū)域結(jié)構(gòu)完整,邊緣細(xì)節(jié)保持良好。 將本文算法實(shí)驗(yàn)結(jié)果圖5(d)、圖5(f)與文獻(xiàn)[18]的實(shí)驗(yàn)結(jié)果圖5(g)、圖5(h)對(duì)比可見,兩種算法均能有效檢測出真實(shí)跑道區(qū)域,檢測出的跑道區(qū)域細(xì)節(jié)都保持良好。本文方法在沒有用到樣本信息的情況下檢測出的跑道區(qū)域與文獻(xiàn)[18]結(jié)果一樣,足以說明本文算法比文獻(xiàn)[18]算法更優(yōu)。 實(shí)驗(yàn) 2實(shí)驗(yàn)數(shù)據(jù)是利用美國UAVSAR系統(tǒng)采集于美國Big Island區(qū)域上空全極化數(shù)據(jù)(同實(shí)驗(yàn)1一樣為L波段4視數(shù)據(jù))。圖像大小為900像素×900像素,如圖6(a)、圖6(b)所示。場景中除包括Kona國際機(jī)場外,還含有多種復(fù)雜地物,包括建筑物、農(nóng)田、森林、灌木、草地、裸地等。圖像分辨率為7.2 m(距離向),4.9 m(方位向)。 實(shí)驗(yàn)參數(shù)設(shè)置:根據(jù)圖像的分辨率可計(jì)算出形態(tài)學(xué)處理閾值Th0=459;其余參數(shù)設(shè)置和實(shí)驗(yàn)1相同。實(shí)驗(yàn)結(jié)果如圖7所示。 圖6 Kona國際機(jī)場場景Fig.6 Scenes of Kona international airport 實(shí)驗(yàn)2的實(shí)驗(yàn)結(jié)果分析過程與實(shí)驗(yàn)1相同,這里不在詳述。從圖7(d)檢測結(jié)果圖中看到,真實(shí)跑道區(qū)域?yàn)楸A粝碌奈ㄒ粎^(qū)域,同樣說明了本文方法能完整地檢測出該地區(qū)中機(jī)場跑道區(qū)域,且無虛警。對(duì)比圖7(e)和圖7(f),說明本文方法檢測出的跑道區(qū)域結(jié)構(gòu)完整,邊緣細(xì)節(jié)保持良好。 將本文算法實(shí)驗(yàn)結(jié)果圖7(d)、圖7(f)與文獻(xiàn)[18]的實(shí)驗(yàn)結(jié)果圖7(g)、圖7(h)對(duì)比同樣可見,兩種算法均能有效檢測出真實(shí)跑道區(qū)域,檢測出的跑道區(qū)域細(xì)節(jié)都保持良好。兩種算法檢測結(jié)果一樣,但本文方法克服了文獻(xiàn)[18]對(duì)樣本的依賴性,說明本文算法比文獻(xiàn)[18]算法更優(yōu)。 實(shí)驗(yàn) 3實(shí)驗(yàn)數(shù)據(jù)為UAVSAR系統(tǒng)采集于美國San Andreas Fault區(qū)域上空的全極化數(shù)據(jù)(同樣為L波段4視數(shù)據(jù))。圖像大小為1 051像素×1 151像素,如圖8(a)、圖8(b)所示。場景中除了包含Watsonville Municipal機(jī)場外,還有建筑物、道路、農(nóng)田、河流、草地等地物。圖像方位向和距離向分辨率分別是4.9 m和7.2 m。。 實(shí)驗(yàn)參數(shù)設(shè)置:根據(jù)圖像的分辨率可計(jì)算出形態(tài)學(xué)處理閾值Th0=459;其余參數(shù)設(shè)置和實(shí)驗(yàn)1相同。實(shí)驗(yàn)結(jié)果如圖9所示。 圖7 Kona國際機(jī)場實(shí)驗(yàn)結(jié)果圖Fig.7 Results of Kona international airport scenes 圖8 Watsonville Municipal機(jī)場場景Fig.8 Scenes of Watsonville Municipal airport 實(shí)驗(yàn)3的實(shí)驗(yàn)結(jié)果分析過程同上面兩個(gè)實(shí)驗(yàn)一樣,這里不在詳述。從圖9(d)檢測結(jié)果圖中看到,真實(shí)跑道區(qū)域被完整地保留下來,存在一個(gè)虛警區(qū)域,說明了本文方法能完整地檢測出該機(jī)場跑道區(qū)域。對(duì)比圖9(e)和圖9(f),說明本文方法能有效地檢測出跑道區(qū)域,且跑道目標(biāo)結(jié)構(gòu)完整、細(xì)節(jié)信息保存良好。虛警區(qū)域的存在是由于本文選用的跑道結(jié)構(gòu)特征無法去除所有非跑道區(qū)域,后期將尋找更有效的結(jié)構(gòu)特征用于判別疑似跑道區(qū)域作為研究重點(diǎn)。 將本文算法實(shí)驗(yàn)結(jié)果圖9(d)、圖9(f)與文獻(xiàn)[18]的實(shí)驗(yàn)結(jié)果圖9(g)、圖9(h)對(duì)比同樣可見,兩種算法均能有效檢測出真實(shí)跑道區(qū)域,檢測出的跑道區(qū)域細(xì)節(jié)都保持良好。文獻(xiàn)[18]中應(yīng)用有監(jiān)督分類提取疑似跑道區(qū)域,去除了大部分非跑道區(qū)域,檢測結(jié)果中虛警率很低,但本文方法在沒有用到樣本的情況下,仍能完整地檢測出跑道區(qū)域。總體而言本文方法實(shí)用范圍更廣,比文獻(xiàn)[18]算法更具研究意義。 圖9 Watsonville Municipal機(jī)場場景實(shí)驗(yàn)結(jié)果圖Fig.9 Results of Watsonville Municipal airport scenes 將本文方法應(yīng)用于其余12組由美國UAVSAR系統(tǒng)采集的L波段4視全極化數(shù)據(jù)(含機(jī)場跑道),檢測結(jié)果說明:本文方法能完整、有效地檢測出極化SAR圖像中的機(jī)場跑道區(qū)域,無漏警,虛警率低,且檢測出的跑道結(jié)構(gòu)完整,細(xì)節(jié)清晰,存在虛警的有1個(gè)場景(虛警的存在同樣是因?yàn)檫x用的跑道結(jié)構(gòu)特征沒有去除所有非跑道區(qū)域)。 本文采用h/q分解和貝葉斯迭代分類相結(jié)合的無監(jiān)督分類方法粗提取出疑似跑道ROI,再利用跑道的極化散射特性、弱回波特性、尺寸特征以及結(jié)構(gòu)特性精確提取真實(shí)跑道區(qū)域。通過多組全極化SAR實(shí)測實(shí)驗(yàn)數(shù)據(jù)的驗(yàn)證,本文方法能夠正確、完整地檢測出機(jī)場跑道區(qū)域,同時(shí)檢測結(jié)果中跑道邊緣細(xì)節(jié)信息保存良好,虛警率低。相比于文獻(xiàn)[18]應(yīng)用有監(jiān)督分類方法進(jìn)行機(jī)場跑道檢測,本文將無監(jiān)督分類方法應(yīng)用到疑似跑道ROI提取中,無需先驗(yàn)知識(shí),應(yīng)用范圍廣,且適用于極化SAR圖像分類和其他目標(biāo)檢測,因此本文算法更具有推廣性。 [1] Ni W P, Yan W D, Wu J Z, et al. Detection of airport runway based on the orientation and width spectrums of images[J].InfraredandLaserEngineering,2014,43(11):3655-3662.(倪維平,嚴(yán)衛(wèi)東, 吳俊政, 等. 應(yīng)用圖像方向和寬度譜檢測機(jī)場跑道[J].紅外與激光工程, 2014, 43(11):3655-3662.) [2] Aytekin O, Zongur U, Halici U. Texture-based airport runway detection[J].IEEEGeoscienceandRemoteSensingLetters, 2013, 10(3):471-475. [3] Tripathi A K, Swarup S. Shape and color features based airport runway detection[C]∥Proc.ofthe3rdIEEEInternationalAdvanceComputingConference, 2013: 836-841. [4] Zhuang H L, Low K S. Real time runway detection in satellite images using multi-channel PCNN[C]∥Proc.ofthe9thIEEEConferenceonIndustrialElectronicsandApplications, 2014: 253-257. [5] Cao S X, Jiang J, Zhang G J, et al. Runway detection using line segment statistical model[C]∥Proc.ofthe3rdInternationalConferenceonIntelligentControlandInformationProcessing, 2012: 601-604. [6] Ugur Z, Ugur H, Orsan A, et al. Airport runway detection in satellite images by Adaboost learning[C]∥Proc.oftheImageandSignalProcessingforRemoteSensingXV, 2009:1-12. [7] Pi Y M, Fan L H, Yang X B. Airport detection and runway recognition in SAR images[C]∥Proc.oftheIEEEInternationalGeoscienceandRemoteSensingSymposium, 2003: 4007-4009. [8] Wang W, Liu L, Hu C B, et al. Airport detection in SAR image based on perceptual organization[C]∥Proc.oftheInternationalWorkshoponMulti-Platform/Multi-SensorRemoteSensingandMapping, 2011:1-5. [9] Fu Y L, Xing K, Han X W, et al. Airfield runway detection from synthetic aperture radar image[C]∥Proc.ofthe1stInternationalCongressonImageandSignalProcessing, 2008: 798-801. [10] Xiong W, Zhong J J, Zhou Y. Automatic recognition of airfield runways based on Radon transform and hypothesis testing in SAR images[C]∥Proc.ofthe5thGlobalSymposiumonMillimeterWaves, 2012:462-465. [11] Zhang L P, Zhang H, Wang C, et al. An improved method of airport detection in SAR images[C]∥Proc.oftheSPIEInternationalSocietyforOpticalEngineering, 2009:1-8. [12] Zhang S M, Lin Y, Zhang X H, et al. Airport automatic detection in large space-borne SAR imagery[J].JournalofSystemsEngineeringandElectronics, 2010,21(3):390-396. [13] Luo T W, Li D J, Yang G, et al. Recognition of airport runways in SAR imagery[C]∥Proc.ofthe2ndInternationalConferenceonPrecisionMechanicalInstrumentsandMeasurementTechnology, 2014: 1912-1915. [14] Zhou N, Chen W, Zhao H, et al. Airport detection algorithm in large area satellite borne SAR images[J].SystemsEngineeringandElectronics, 2009, 31(8): 1870-1873. (周諾,陳偉,趙暉,等.大幅面星載SAR圖像中機(jī)場檢測算法[J].系統(tǒng)工程與電子技術(shù),2009,31(8):1870-1873.) [15] Pan C, Dai X Y. Detection of airport ROI in SAR image based on CV model[J].RadioEngineering, 2012, 42(7): 10-13. (潘誠,戴曉燕.基于CV模型的SAR圖像機(jī)場感興趣區(qū)域檢測[J].無線電工程,2012,42(7):10-13.) [16] Wang D, Chen Y Y, Qin P. Airport objects extraction from SAR based on ICA and SNF[J].ComputerEngineering, 2009,35(24):1-3. (王棟,陳映鷹,秦平.基于ICA和SNF的SAR機(jī)場目標(biāo)提取[J].計(jì)算機(jī)工程,2009,35(24):1-3.) [17] Zhang L P, Zhang H, Wang C, et al. A fast method of airport detection in large-scale SAR image with high resolution[J].JournalofImageandGraphics, 2010, 15(7): 1112-1120.(張立平, 張紅, 王超, 等.大場景高分辨率SAR圖像中機(jī)場快速檢測方法[J].中國圖象圖形學(xué)報(bào),2010,15(7):1112-1120.) [18] Han P, Xu J S. PolSAR image runways detection based on multi-stage classification[J].SystemsEngineeringandElectronics, 2014, 36(5): 866-871. (韓萍,徐建颯.基于多級(jí)分類的PolSAR圖像機(jī)場跑道檢測[J].系統(tǒng)工程與電子技術(shù),2014,36(5):866-871.) [19] An W T, Cui Y, Yang J. Fast alternatives to H/α for polarimetric SAR[J].IEEETrans.onGeoscienceandRemoteSensing, 2010,7(2):343-347. [20] Lee J S,Pottier E.Polarimetricradarimaging:frombasicstoapplications[M].Florida: CRC Press, 2009:66-240. [21] Wu Y H, Ji K F, Li Y, et al. Segmentation of multi-look fully polarimetric SAR images based on Wishart distribution and MRF[J].ActaElectronicaSinica, 2007,35(12):2302-2306. (吳永輝,計(jì)科峰,李禹,等.基于Wishart分布和MRF的多視全極化SAR圖像分割[J].電子學(xué)報(bào),2007,35(12):2302-2306.) [22] Liu D Y.Thecivilaviationstudies(Revisededition)[M].Beijing: China Civil Aviation Press, 2005: 202-204. (劉得一.民航概論(修訂版)[M].北京:中國民航出版社,2005:202-204.) Runways detection based onh/qdecomposition and iterative Bayesian classification HAN Ping, CHANG Ling, CHENG Zheng, SHI Qing-yan (TianjinKeyLabforAdvancedSignalProcessing,CivilAviationUniversityofChina,Tianjin300300,China) A new algorithm of runways detection based on unsupervised classification is proposed. Firstly, initial sample templates are constructed from the original image withh/qdecomposition. Then, the pixels in the original image are classified again with Bayesian classifier based on the initial sample templates. Thirdly,combining the property of polarization scattering and the weak backscattering feature of runways with Morphology filtering, suspected runway areas will be extracted from the above classification image. Using the runways structural features to identify suspected runway areas, the real runway area is detected finally. Multi-look fully polarimetric synthetic aperture radar (SAR) data acquired by U.S.UAVSAR systems is used to test the proposed algorithm. Experimental results show that the novel algorithm can detect runways effectively from complex scenes of the polarimetric SAR image and has a low false alarm rate and the detected results keep an intact structure and clear outlines. h/qdecomposition; iterative Bayesian classification; polarimetric synthetic aperture radar (SAR) image; runways detection; polarimetric scattering property 2015-12-03; 2016-02-22;網(wǎng)絡(luò)優(yōu)先出版日期:2016-06-08。 國家自然科學(xué)基金(61571442, 61471365, 61231017);中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金(3122014C004)資助課題 TP 753 A 10.3969/j.issn.1001-506X.2016.09.12 韓萍(1966-),女,教授,博士,主要研究方向?yàn)閿?shù)字信號(hào)處理、模式識(shí)別。 E-mail:hanpingcauc@163.com 常玲(1989-),女,碩士研究生,主要研究方向?yàn)闃O化合成孔徑雷達(dá)圖像處理。 E-mail:13865752908@163.com 程爭(1990-),男,碩士研究生,主要研究方向?yàn)闃O化合成孔徑雷達(dá)圖像處理。 E-mail:15202281737@163.com 石慶研(1977-),女,講師,博士,主要研究方向?yàn)殛嚵行盘?hào)處理、盲信號(hào)處理。 E-mail:qyshi@cauc.edu.cn 網(wǎng)絡(luò)優(yōu)先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160608.0840.002.html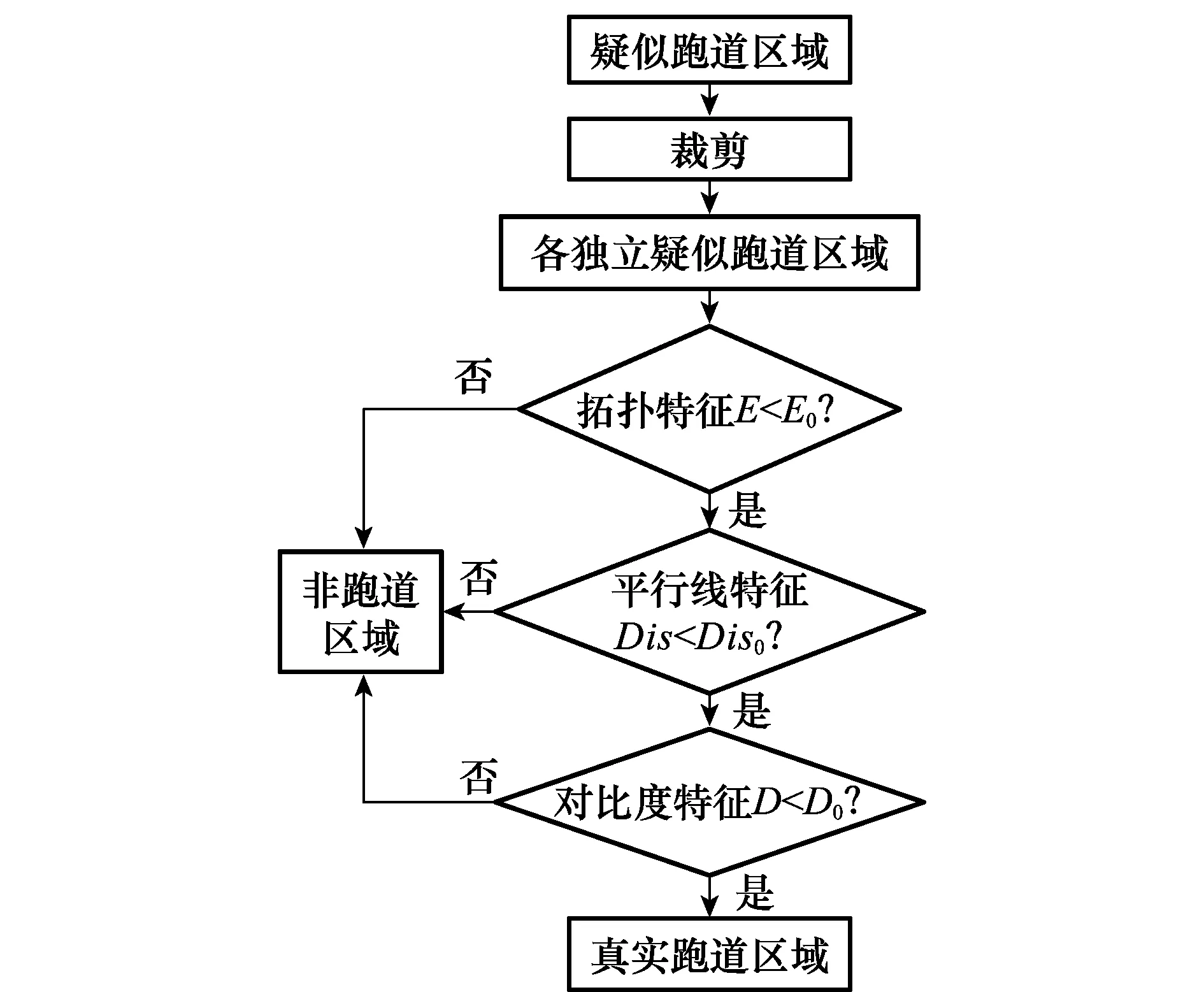
3 實(shí)驗(yàn)結(jié)果及分析

4 結(jié) 論
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52太空探索(2016年5期)2016-07-12 15:17:55中國科技博覽(2016年2期)2016-04-25 20:32:39小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44