控制方向未知的輸入受限非線性系統自適應模糊反步控制
2016-09-07 03:17:29王永超張勝修曹立佳扈曉翔
系統工程與電子技術 2016年9期
王永超, 張勝修, 曹立佳, 扈曉翔
(火箭軍工程大學自動控制工程系, 陜西 西安 710025)
?
控制方向未知的輸入受限非線性系統自適應模糊反步控制
王永超, 張勝修, 曹立佳, 扈曉翔
(火箭軍工程大學自動控制工程系, 陜西 西安 710025)
針對一類輸入受限控制方向未知的非線性系統,提出一種基于Lipschitz條件的自適應模糊反步控制器的設計方法。在控制器的設計過程當中,通過變換系統形式和采用Butterworth低通濾波器解決控制方向未知的問題;采用模糊系統對不確定非線性函數進行在線逼近;利用雙曲正切函數和Nussbaum函數對系統輸入飽和函數進行處理;將動態面法與反步法相結合解決“計算膨脹”的問題。運用Lyapunov理論分析證明設計的控制律能夠使閉環系統所有信號半全局一致有界(semi-globallyuniformlyultimatelybounded,SGUUB)。該方法的有效性在一類通用的高超聲速飛行器的攻角控制仿真中得到了驗證。
輸入受限;非線性系統;自適應模糊;反步法;高超聲速飛行器
0 引 言
輸入受限問題普遍存在于控制系統工作過程中。近年來,引起了廣大學者的普遍關注。基于小波網絡,文獻[1]設計出了一種抗飽和自適應控制器。文獻[2]針對線性自抗擾控制(linearactivedisturbancerejectioncontrol,LADRC)執行機構的飽和約束問題,提出了兩種抗飽和補償方案。文獻[3]提出了一種針對控制受限問題的時變滑模控制方案。文獻[4]提出了一種利用神經網絡在線逼近補償執行機構的飽和非線性智能自適應滑模控制方法。文獻[5-6]利用雙曲正切函數解決輸入飽和受限問題,引入Nussbaum增益函數應對未知項,基于反步法設計出了魯棒控制器。文獻[7-8]利用線性矩陣不等式(linearmatrixinequation,LMI)設計出了對飽和進行實時補償的控制器。文獻[9-10]將系統輸入幅值受限問題轉化為預測控制框架中待求解目標函數的約束條件。
1991年,由Kokotovic等人首次提出反步法[11]。反步法實際上是一種由前向后遞推的方法,所以又稱逐步后推法,在解決具有純反饋形式的非線性系統控制器設計問題上,具有明顯的優勢。但是傳統的反步法,虛擬控制器需要反復求導,計算量隨著階數的增加呈指數增長,這使得控制器難以工程化實現。為了有效應對這種被Bellman稱為“微分爆炸”的難題,文獻[12]引入了一階濾波器,首先提出了稱之為動態面控制(dynamicalsurfacecontrol,DSC)的方法,避免了虛擬控制量的反復求導。伴隨著模糊理論的發展,自適應模糊反步法已經廣泛應用于非線性系統控制器的設計[12-13]。這一類的控制算法具備以下所列出的顯著優勢:①無需被控系統滿足匹配條件;②無需被控系統的未知非線性函數能夠參數線性化。故自適應模糊反步法在針對非線性不確定系統控制器設計上應用非常普遍。
近年來針對不滿足匹配條件的非線性系統輸入受限問題,許多學者將反步法與模糊逼近相結合進行了比較深入的研究[5,14-15]。但這些研究成果在處理控制方向問題上,一般采用假設已知控制方向的做法。控制方向未知的非線性系統控制器設計有待進一步解決。
本文針對一類輸入受限的單輸入單輸出(singleinputsingleoutput,SISO)系統,提出一種基于Lipschitz條件的自適應模糊反步控制方法。在設計虛擬控制律的過程中,通過變換系統形式和采用Butterworth低通濾波器解決控制增益方向未知的問題,運用帶有中心平均解模糊器的模糊系統在線逼近系統中包含不確定參數的函數。將雙曲正切函數和Nussbaum函數有機結合,應對輸入飽和和補償所引起的未知項。系統的閉環系統穩定性能通過Lyapunov經典穩定理論進行詳細地分析證明。
1 問題描述及模糊邏輯系統建立
1.1問題描述
考慮如式(1)所示的一類SISO非線性系統:
(1)
式中,xi(t)=[x1(t),…,xi(t)]T∈Ri是狀態向量;y∈R是輸出量;fi(·)和gi(·)均為未知的光滑非線性函數;v(t)為系統控制器輸入量;d(t)為系統受到的外界干擾;u(v(t))為具有飽和約束性質的輸出控制量,其表達式為
(2)
式中,uM是系統式(1)中控制器的輸出上界值。
定義雙曲正切函數h(v(t))(v(t)記為v,其他變量和狀態作類似處理)為
(3)
則飽和函數可以表示為

(4)
式中,w(v)=sat(v)-h(v)為有界函數,其界限值表示為
(5)
文中的目的是通過設計魯棒控制器使得式(1)中的輸出y能夠穩定跟蹤參考指令yr。
根據控制器設計和穩定性證明過程中的實際需求,作出如下合理的假設、定義和引理。
假設 1參考信號yr及其n階導數已知且有界。
定義 1如果連續函數N(s)滿足如下性質:
則稱N(s)為Nussbaum函數。
引理 1[15]V(·)和χ(·)均為定義在區間[0,tf)上的光滑函數,且?t∈[0,tf),V(t)≥0,N(χ)為Nussbaum增益函數。如果如式(6)所示不等式成立,則函數V(·)和χ(·)在[0,tf)必有界。
(6)
式中,C,M,γχ>0均為常數;ζ為一正變量。
1.2模糊邏輯系統建立
模糊器、知識庫、模糊推理機和解模糊器構成模糊邏輯函數這個有機整體。依賴于經驗知識建立的知識庫是模糊系統的核心。知識庫包含如下所示的IF-THEN模糊規則:

假設 2[16]文中建立的一系列IF-THEN模糊規則中,模糊集Bl為標準模糊集。
根據假設2,建立的模糊基函數表示為
(7)
(8)
引理 2[17]如果F(x)(x∈Rn)是緊集Ω上的一個連續函數。?ε>0,必將存在FLS使得
(9)
定義最優估計參數集
(10)
假設 3存在未知有界常數ε*>0,使得模糊逼近誤差ε(x)=F(x)-θTξ(x),滿足|ε(x)|≤ε*。
2 控制器設計及穩定性分析
根據式(3),系統等效為
(11)

(12)
式中,HL(s)為Butterworth低通濾波器(lowpassfilter,LPF)。
(13)
式中,‖·‖表示向量的2-norm范數。
假設 5[18-20]執行器具有低通特性,即使得xi,f=HL(s)·xi≈xi。故存在一常數βi,0使得不等式|xi-xi,f|≤βi,0成立。
需要說明的是,假設5中xi,f≈xi,uf≈h(v)是合理的,因為大多數控制系統的執行器具有低通特性[18-20]。
下面將結合反步法和DSC開展受限控制器的設計工作。
步驟 1定義
z1=x1-yr
則z1關于時間t的導數為
(14)

(15)

式中,τ1為一階濾波器的時間常數。
定義
(16)
(17)
根據式(17),κ1關于時間t的導數為
(18)

根據式(14)~式(16),z1關于時間t的導數為
(19)
選擇Lyapunov函數為
(20)

(21)
將式(19)代入式(21),得
(22)
引理 3對于?D>0,|x|-xtanh(x/D)≤0.278 5D=D′成立。
(23)
(24)
(25)
式中,c1>0為常數。
采用投影法[16],引入參數的自適應律為
(26)
式中,M1為設定的最大值。根據文獻[16]可知,估計參數θ1滿足‖θ1‖≤M1,并且使得
(27)
則根據式(23)~式(27),式(22)可變換為
(28)
根據Young’s不等式,假設4和假設5可得
(29)
(30)
(31)
則式(28)可變換為
(32)
步驟 i(2≤i≤n-1)定義
(33)
(34)
(35)
(36)
zi關于時間t的導數為
(37)
同時對式(35)求導,得
(38)
選擇Lyapunov函數Vi為
(39)
式中,ri1,ri2>0。則Vi關于時間t的導數為
(40)
根據引理3,式(40)可變換為
(41)
選取參數自適應律:
(42)
(43)
(44)
式中,ci>0為常數。
并根據上述參數自適應律和Young’s不等式以及假設4和假設5,式(41)可變換為
(45)
步驟 n定義
(46)
(47)
(48)
(49)
式(46)和式(48)關于時間t的導數分別為
(50)
(51)
選擇Lyapunov函數Vn為
(52)
式中,rn1,rn2>0。則Vn關于時間t的導數為
(53)
根據引理3,式(53)可變換為
(54)
選擇參數自適應律:
(55)
(56)
(57)
式中,cn>0為常數。
并根據上述參數自適應律和Young’s不等式以及假設4和假設5,式(54)可變換為
(58)
步驟 n+1定義

(59)

(60)
(61)
(62)

(63)
選擇Lyapunov函數
(64)
則Vn+1關于時間t的導數為
(65)
為了保證閉環系統所有信號的有界性,選取Lyapunov函數Vsum
(66)

根據式(32),式(45),式(58)和式(66),函數Vsum關于時間t的導數為
(67)
式中
對式(68)積分,得
(68)
依據引理1和式(69)可以得到Vsum和χ有界的結論,且跟蹤誤差滿足不等式:
(69)
(70)
從式(72)中不難得到閉環系統的跟蹤誤差終值有界。
根據以上Lyapunov穩定性理論的推倒證明,得到定理1。
定理 1對于控制方向未知的非線性系統式(1),依據反步法和模糊系統理論,設計出如式(59)所示的控制器和如式(24)~式(26)、式(42)~式(44)和式(55)~式(57)所示的自適應律。則形成的閉環系統所有信號半全局最終一致有界(semi-globallyuniformlyultimatelybounded,SGUUB)。
3 仿真分析
本文以一種吸氣式高超聲速飛行器在速度V=4 590.3m/s,高度h=33 528m的飛行條件下攻角的跟蹤控制為對象,對控制系統進行仿真研究。
首先建立縱向特性方程[6,20]:
(71)
式中,α,q分別表示氣動攻角和俯仰姿態角;m,V依次為高超聲速飛行器的質量和沿機體軸向速度;L,T,Myy依次為施加在機體上的升力,推力和縱向俯仰力矩。式中所涉及的氣動力與氣動力矩計算表達式為
(72)
式(73)中氣動參數的具體表達形式及參數的不確定度詳見文獻[21]。
由于舵面的偏轉受到幅值限制,同時機體還會受到外界干擾的影響,故可將式(72)轉換為
(73)

控制器參數分別為c1=13,c2=18,c3=7,c=6,γχ=0.008,τ1=0.015,τ2=0.045,χ(0)=0.4。
仿真中給定的攻角參考指令信號為yr=-22.5°cost+22°,設定飛行器舵偏角的偏轉范圍為±30°[6],取俯仰軸上受到的諧波干擾力矩大小為3×106sin(2t)。
圖1中虛線表示為給定的攻角參考指令信號曲線,實線表示的為系統實際的跟蹤響應曲線。從圖中可以看出,在所設計的控制器的作用下,系統能夠對給定的指令信號實現很好的跟蹤,且跟蹤誤差一直保持在0的一個很小的鄰域內。圖2中舵偏角的輸入信號用虛線表示,實線表示控制器舵偏角信號。圖中顯示不論舵輸入信號發生多大的角度變化,舵偏角一直處于幅值范圍內,并且能夠實現對指令信號的跟蹤。充分驗證了本文設計方法在系統存在參數不確定和較大外界干擾時具有很強的魯棒性能。
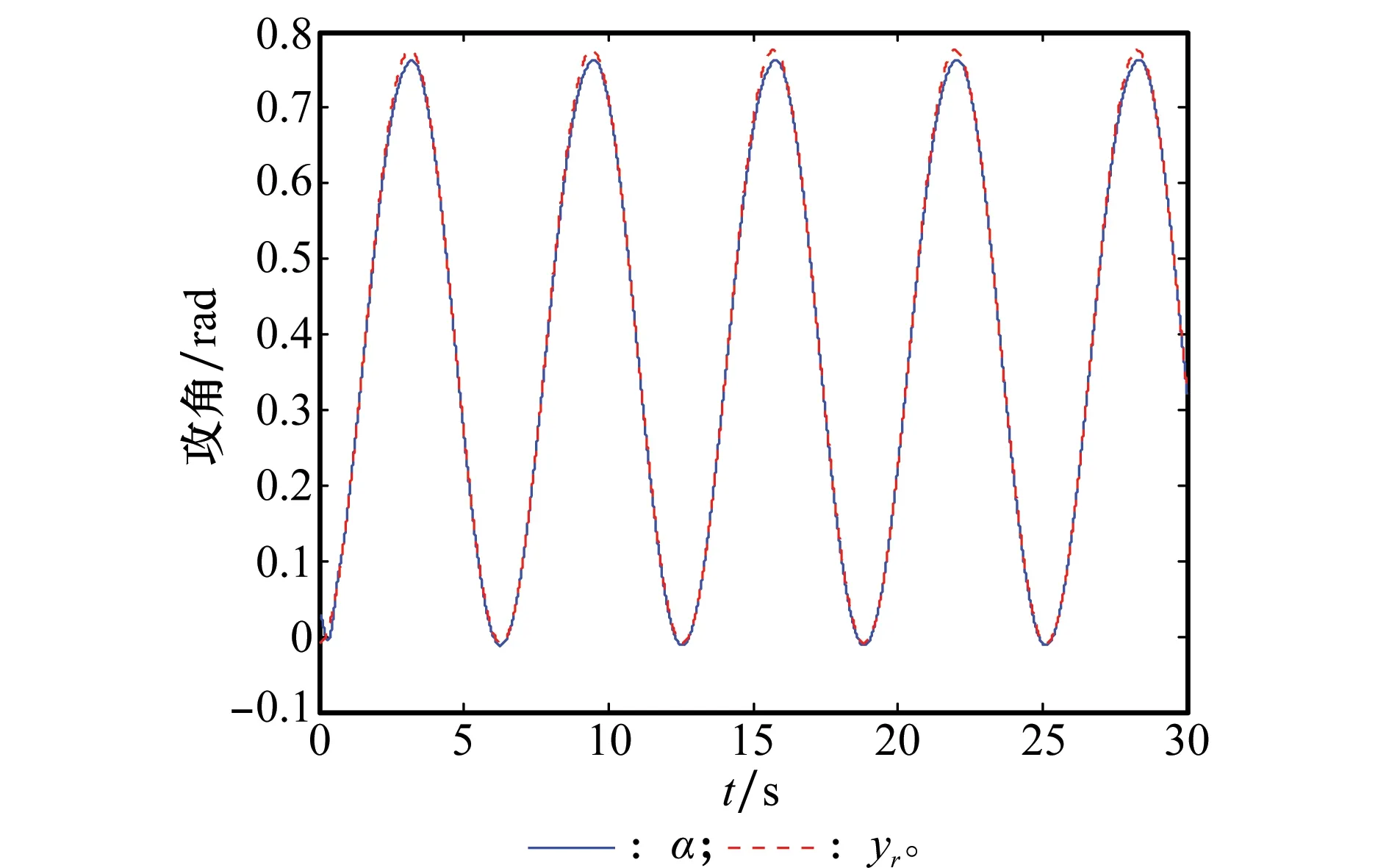
圖1 輸出響應曲線Fig.1 Curves of output response
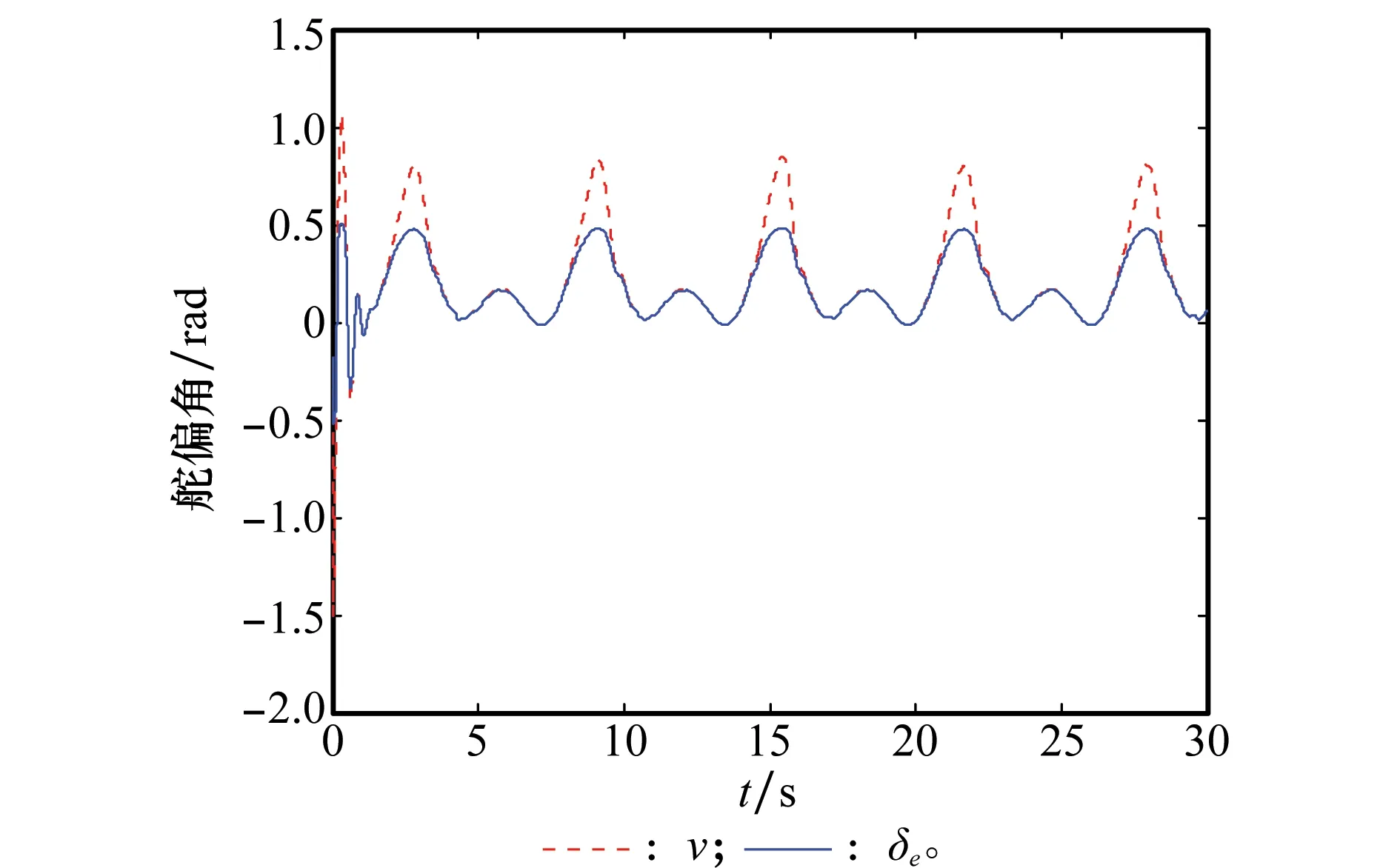
圖2 系統控制信號Fig.2 Curves of control signals
4 結 論
文中針對一類不確定非線性系統設計了一種約束反步控制方法。首先通過變換系統形式和采用Butterworth低通濾波器解決了受控系統控制增益方向未知的問題,將反步法與DSC相結合,不但非常有效地解決了“微分爆炸”的難題,而且使得中間控制變量變得更加簡潔,利于工程化的實現。引入雙曲正切函數和Nussbaum增益函數有效地應對了普遍存在于非線性系統中的幅值約束問題。通過選取Lyapunov函數分析證明了系統中的所有信號是SGUUB。最后,依據本文提出的控制算法在高超聲速飛行器的攻角跟蹤控制回路上進行仿真驗證,最終的結果驗證了本文方法的有效性。
[1] Sonneveldt L, Chu Q P, Mulder J A. Nonlinear flight control design using constrained adaptive backstepping[J].JournalofGuidance,Control,andDynamics,2007, 30(2):322-336.
[2] Zhou H, Tan W. Anti-windup schemes for linear active disturbance rejection control[J].ControlTheory&Applications, 2014, 31(11): 1457-1463. (周宏, 譚文. 線性自抗擾控制的抗飽和補償措施[J]. 控制理論與應用, 2014, 31(11): 1457-1463.)
[3] Jin Y Q, Liu X D, Qiu W, et al. Time-varying sliding mode control for a class of uncertain MIMO nonlinear system subject to control input constraint[J].ScienceChina(InformationSciences), 2010, 53(1): 89-100.
[4] Hu Q L, Zhang A H, Jiang C P, et al. Attitude control of satellite in process of orbit transfer with constraint input[J].JournalofHarbinInstitudeofTechnology, 2013, 45(5): 1-6.(胡慶雷, 張愛華, 姜成平, 等. 控制受限的衛星軌道轉移過程中的姿態控制[J]. 哈爾濱工業大學學報, 2013, 45(5): 1-6.)
[5] Li Y M, Tong S C, Li T S. Direct adaptive fuzzy backstepping control of uncertain nonlinear systems in the presence of input saturation[J].NeuralComputation&Applications, 2013, 23(5): 1207-1216.
[6] Zhou Y L, Chen M. Robust control of nonlinear systems with input constraint based on disturbance observer[J].JournalofNanjingUniversityofScienceandTechnology, 2014, 38(1): 40-47.(周硯龍, 陳謀. 基于干擾觀測器的輸入受限非線性系統魯棒控制[J]. 南京理工大學學報, 2014, 38(1): 40-47.)
[7] Liu J K, Wang M Z. Anti-windup control based on LMI and vibration suppression for the flexible spacecraft[J].ElectricMachinesandControl, 2014, 18(3):79-84.(劉金錕, 王明釗. 撓性航天器LMI抗飽和控制及模態振動抑制[J]. 電機與控制學報, 2014, 18(3):79-84.)
[8] Huang X L, Ge D M. Robust gain-scheduling control of hypersonic vehicle subject to input constraints[J].SystemsEngineeringandElectronics,2011,33(8):1829-1836.(黃顯林,葛東明.輸入受限高超聲速飛行器魯棒變增益控制[J].系統工程與電子技術,2011, 33(8): 1829-1836.)
[9] Kurtz M J, Henson M A. Input-output linerizing control of constrained nonlinear processes[J].JournalofProcessControl, 1997, 7(1): 3-17.
[10] Kong X B, Liu X J. Continuous-time nonlinear model predictive control with input/output linearization[J].ControlTheory&Applications, 2012, 29(2): 217-224.(孔小兵, 劉向杰. 基于輸入輸出線性化的連續系統非線性模型預測控制[J]. 控制理論與應用, 2012, 29(2):217-224.)
[11] Kanellakopoulos I, Kokotovic P V, Morse A S. Systematic design of adaptive controller for feedback linearizable systems[J].IEEETrans.onAutomaticControl,1991,36(11):1241-1253.
[12] Swaroop D, Hedrick J K, Yip P P, et al. Dynamic surface control for a class of nonlinear systems[J].IEEETrans.onAutomaticControl, 2000, 45(10): 1893-1899.
[13] Chen B, Tong S C, Liu X P. Fuzzy approximate disturbance decoupling of MIMO nonlinear systems by backstepping approach[J].FuzzySetsandSystems, 2007, 158(10): 1097-1125.
[14] Zhang T P, Wen H, Zhu Q. Adaptive fuzzy control of nonlinear systems in pure feedback form based on input-to-state stability[J].IEEETrans.onFuzzySystems, 2010, 18(1):80-93.
[15] Wen C Y, Zhou J, Liu Z T. Robust adaptive of uncertain nonlinear systems in the presence of input saturation and external disturbance[J].IEEETrans.onAutomaticControl, 2011, 56(7): 1672-1678.
[16] Wang L X. Stable adaptive fuzzy control of nonlinear systems[J].IEEETrans.onFuzzySystems, 1993, 1(2):146-155.
[17] Wang L X.Adaptivefuzzysystemsandcontrol——designandstabilityanalysis[M]. Beijing: National Defence Industry Press, 1995.(王立新. 自適應模糊系統與控制——設計與穩定性分析[M]. 北京:國防工業出版社, 1995.)
[18] Zou A M, Hou Z G. Adaptive control of a class of nonlinear pure-feedback systems using fuzzy backstepping approach[J].IEEETrans.onFuzzySystems, 2008, 16(4): 886-897.
[19] Kim E, Sungryul L. Output feedback tracking control of MIMO systems using a fuzzy disturbance observer and its application to the speed control of a PM synchronous motor[J].IEEETrans.onFuzzySystems, 2005, 13(6): 725-741.
[20] Tong S C, Li Y M. Observer-based adaptive fuzzy backstepping control of uncertain nonlinear pure-feedback systems[J].ScienceChina(InformationSciences), 2014, 57(1): 1-14.
[21] Xu H J, Mirmirani M D, Ioannou P A. Adaptive sliding mode control design for a hypersonic flight vehicle[J].JournalofGuidance,Control,andDynamics, 2004, 27(5): 829-838.
Adaptivefuzzybacksteppingcontrolfornonlinearsystemwithunknowncontroldirectionandinputsaturation
WANGYong-chao,ZHANGSheng-xiu,CAOLi-jia,HUXiao-xiang
(Department of Automatic Control Engineering,Rocket Force Engineering University, Xi’an 710025, China)
AnadaptivefuzzybacksteppingcontrollerdesignmethodbasedonLipschitzconditionisdeve-lopedtodealwiththenonlinearsystemwithinputsaturationandunknowncontroldirection.Alongthecontrollerdesignprocess,thetransformedstyleandButterworthlowpassfilterareusedtosolvetheproblemoftheunknowncontroldirection.Byusingthefuzzylogicsystemtoidentifytheuncertainnonlinearfunctionsonline.ThehyperbolictangentfunctionandNussbaumareusedtohandletheinputsaturation.Thebacksteppingapproachiscombinedwiththedynamicsurfacecontroltechniquetosolvetheproblemof“explosionofcomplexity”.ItisshownwithLyapunovstabilitytheoremthattheproposedcontrolmethodcanguaranteethatallthesignalsoftheresultingclosed-loopsystemaresemi-globallyuniformlyultimatelybounded(SGUUB)inprobability.Finally,themethodisappliedforthecontroldesignoftheattackangleofthehypersonicvehicle.Simulationresultsshowtheeffectivenessofthepresentedmethod.
inputsaturation;nonlinearsystem;adaptivefuzzy;backsteppingapproach;hypersonicvehicle
2015-02-06;
2015-08-24;網絡優先出版日期:2016-01-14。
國家自然科學基金(61304001,61304239)資助課題
TP273.2
ADOI:10.3969/j.issn.1001-506X.2016.09.26
王永超(1991-),男,博士研究生,主要研究方向為智能魯棒控制。
E-mail:wyc031566@163.com
張勝修(1963-),男,教授,博士研究生導師,博士,主要研究方向為組合導航與飛行器制導控制。
E-mail:zsx1963@aliyun.com.cn
曹立佳(1982-),男,講師,博士,主要研究方向為飛行器控制、仿真與決策。
E-mail:caolijia82@gmail.com
扈曉翔(1982-),男,講師,博士,主要研究方向為非線性系統魯棒控制。
E-mail:hxx820605@163.com
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160114.1658.008.html
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16