基于MatLab/Simulink的EPS系統參數的優化仿真
2016-09-06 02:19:35賈滿滿
商丘師范學院學報 2016年9期
賈滿滿
(商丘師范學院 物理與電氣信息學院 河南 商丘 476000)
?
基于MatLab/Simulink的EPS系統參數的優化仿真
賈滿滿
(商丘師范學院 物理與電氣信息學院 河南 商丘 476000)
大多數汽車電動助力轉向系統(EPS)控制器使用PID控制,而控制器參數設計通常使用試湊法反復試驗來確定,所以汽車操縱的輕便性和靈活性不可能達到最優.針對這種情況,提出了用單純形法設計EPS系統控制器參數,尋找優化設計的目標函數.運用MatLab控制工具箱建立系統模型并進行了Simulink仿真實驗研究,仿真實驗結果表明.運用單純形法設計EPS系統控制器能夠較大的提高其時域響應,提高了汽車操縱的輕便性和靈活性,并為優化設計提供了理論依據.
電動助力轉向;單純形;PID;Simulink仿真
0 引 言
電動助力轉向系統(EPS)是靠電動機來提供輔助助力,助力的大小受電子控制單元(ECU)控制,從而控制電動機的輸出力矩實現轉向助力.EPS控制系統的參數優化設計是在被控對象和控制器已知的條件下,經過在線調節控制器的參數,使EPS控制系統達到優化的目的.本文為了提高EPS系統的時域響應,提高汽車操縱的跟蹤性和輕便性,避免控制器參數優化設計使用試湊法反復試驗來確定的弊端,通過分析EPS系統并依據牛頓定理建立其數學模型,然后采用單純形法對EPS的PID控制器參數進行優化設計.
1 EPS數學模型的建立
EPS的機械部分如圖1所示,簡化后由電機組件、方向盤轉向柱組件和齒輪齒條組件組成.忽略各種非線性摩擦并根據牛頓運動定律建立運動方程,得到整個系統的數學模型[1,2].
(1)
(2)
(3)
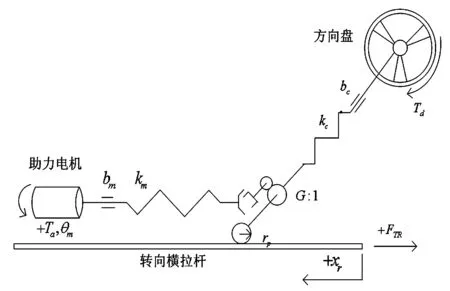
圖1 EPS系統動態結構模型
對上式進行變量定義.Jc與Jm分別是轉向盤轉向柱轉動慣量與電機子系統轉動慣量;θc與θm分別是轉向盤轉動的角度與助力電機的轉動角度;kc與km分別是轉向柱剛度與電動機系統管柱剛度;xr和m是轉向橫拉桿的位移和質量;bc、bm和b分別是轉向盤轉向柱子系統阻尼系數、電機系統阻尼系數及轉向橫拉桿系統阻尼系數;rp是轉向小齒輪的半徑;G是齒輪傳動比;FTR為轉向橫拉桿作用力;Td與Tm分別為方向盤輸入扭矩、電動機輸出扭矩[3-5].
2 電動助力轉向系統控制器參數優化
2.1傳統PID控制參數確定方法
PID控制器是把偏差的比例P、積分I與微分D由線性組合組成控制量,對被控對象進行相應的控制.其控制規律為:
(4)
式中比例環節成比例地反映控制信號的偏差信號e(t),如果偏差出現,控制器會產生控制作用來減少偏差.積分環節可以消除靜差,積分時間常數TI決定積分環節的強弱,當TI越大時,積分作用會越弱.微分環節決定偏差信號的變化速率,會在偏差信號變的太大前在控制系統中加入修正信號,進而減小調節時間.
由于EPS是有差系統,為了保持系統的靜差,在應用中控制器采用不完全的PID控制,也即P控制或PD控制.當比例系數太大時,系統可能發生等幅振蕩,甚至出現發散振蕩;反之,系統會越穩定.微分輸出的方向會阻止被控變量的變化,使偏差不變,因此,當被控變量發生劇烈的變化時,能在劇烈變化發生瞬間,提供較大的調節作用,減少被控變量的波動幅度.
控制器參數確定的方法通常有經驗法、半經驗法、反應曲線法和理論計算法.
(1)經驗法可先設置比例度,確定系統的振蕩周期Tp,接著根據被控過程的特點,當采用PI控制時,設置Ti=(0.5-1)Tp;對成分、溫度等被控過程,可采用PID控制,設置Td=(0.25-0.5)Ti.即比例度從大到小搜索,直到過渡過程符合控制要求.
(2)半經驗法先用單純P作用搜索,得到所需衰減比的響應曲線,接著根據相應的振蕩周期和參數等數據,用半經驗公式計算PI或PID控制器的參數.
(3)反應曲線法和理論計算法得出控制器參數.
經驗法和半經驗法通過閉環運行觀察系統的響應曲線,通過反復試湊參數達到滿意的結果,確定PID的控制參數.此方法有一定的局限性,因為需要反復試驗,控制效果也可能達不到最優.反應曲線法和理論計算法通過大量計算得到控制器參數,參數最優值的確定有一定的困難.通過目標函數對控制系統PID參數的優化能解決參數最優問題,本文EPS系統的PID控制器參數的確定采用單純形法尋優.
2.2目標函數的選取
單純形是變量空間內最簡單的規則形體.在如圖2所示的二維空間取平面上的三個點構成單純形.單純形的尋優過程為[7]:
(1)△XYZ的X點是壞點,便拋棄X點,并把三角形YZ沿邊翻轉,可得到新△X1YZ.不斷重復此過程,就是拋棄壞點,并建立新點.如果壞點重復,就拋棄次壞點,并接著上述過程.
(2)當三角形接近峰頂(即最優值)時,會發生三角形繞相同“好點”轉圈的情況,即好點重復出現.假如單純形繞最優點翻轉的次數用T表示,變量的維數用N表示,當T≥1.65N時表示三角形達到峰頂.
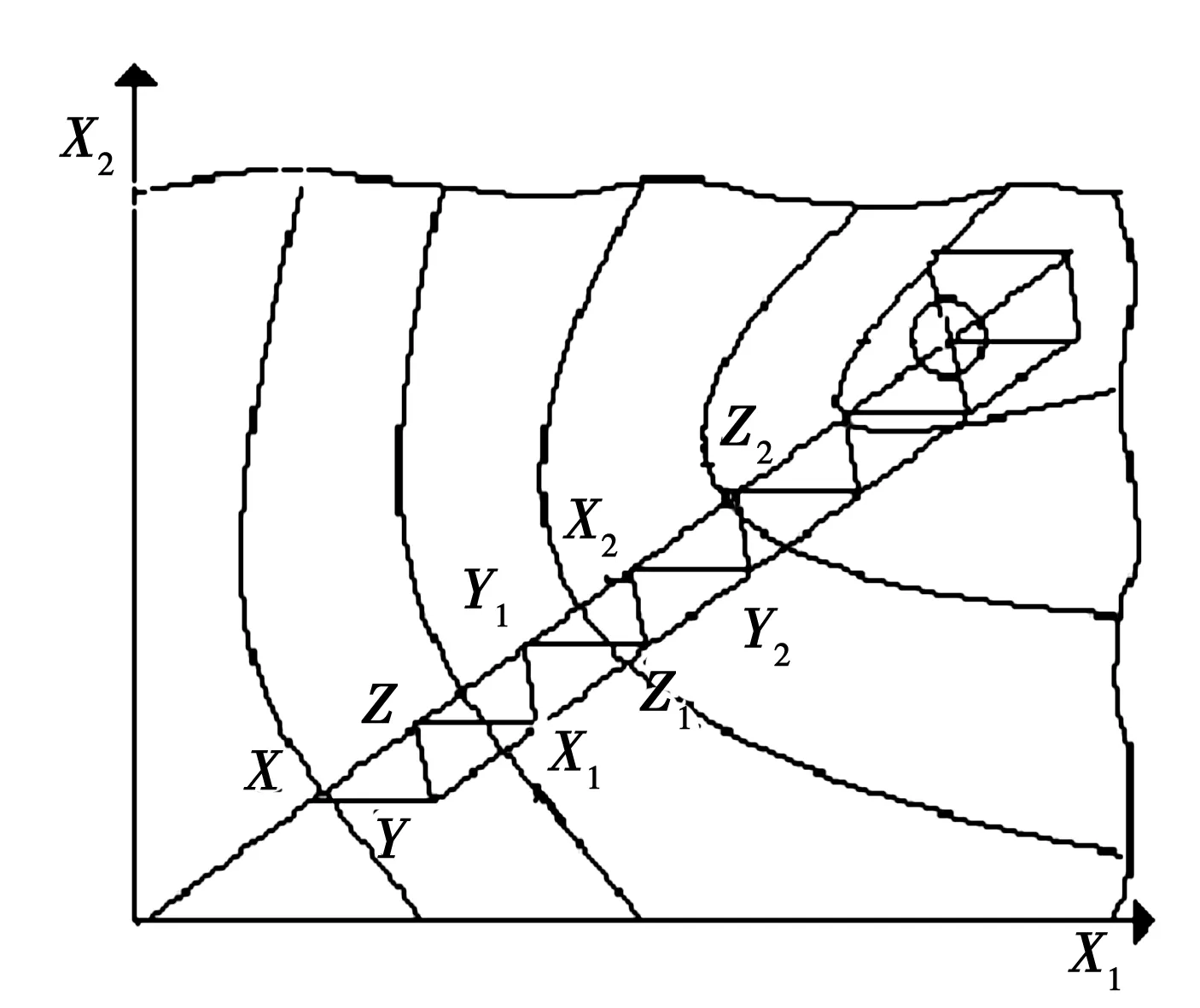
圖2 單純形法尋優原理
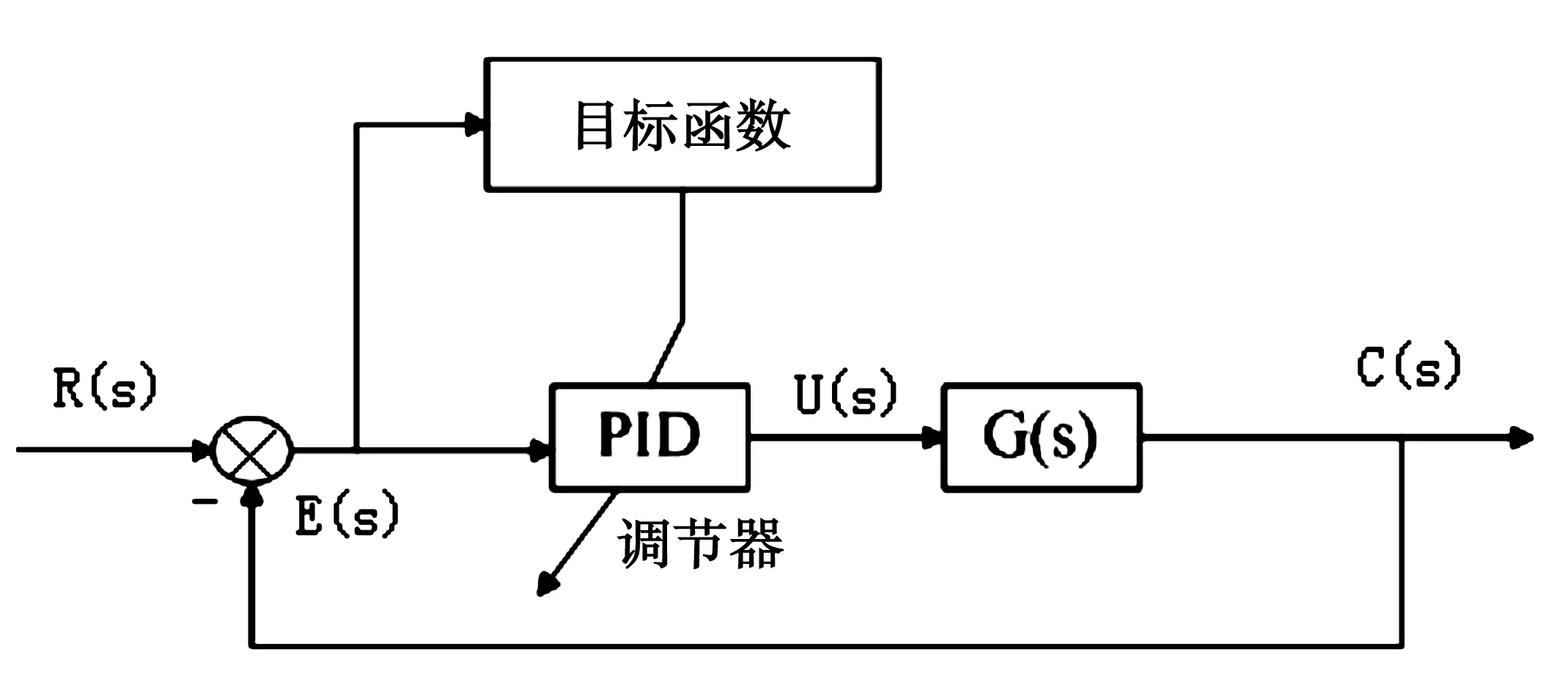
圖3 控制系統調節器參數優化設計原理圖
(3)假如對變量的精度要求比較高,可先把單純的邊長值縮小,然后接著尋優過程,一直到滿意的參數.單純形法求出的“好點”為最優設計方案,求出的變量值即為最優參數.

(5)
EPS系統利用單純形法仿真流程圖如下圖4所示:
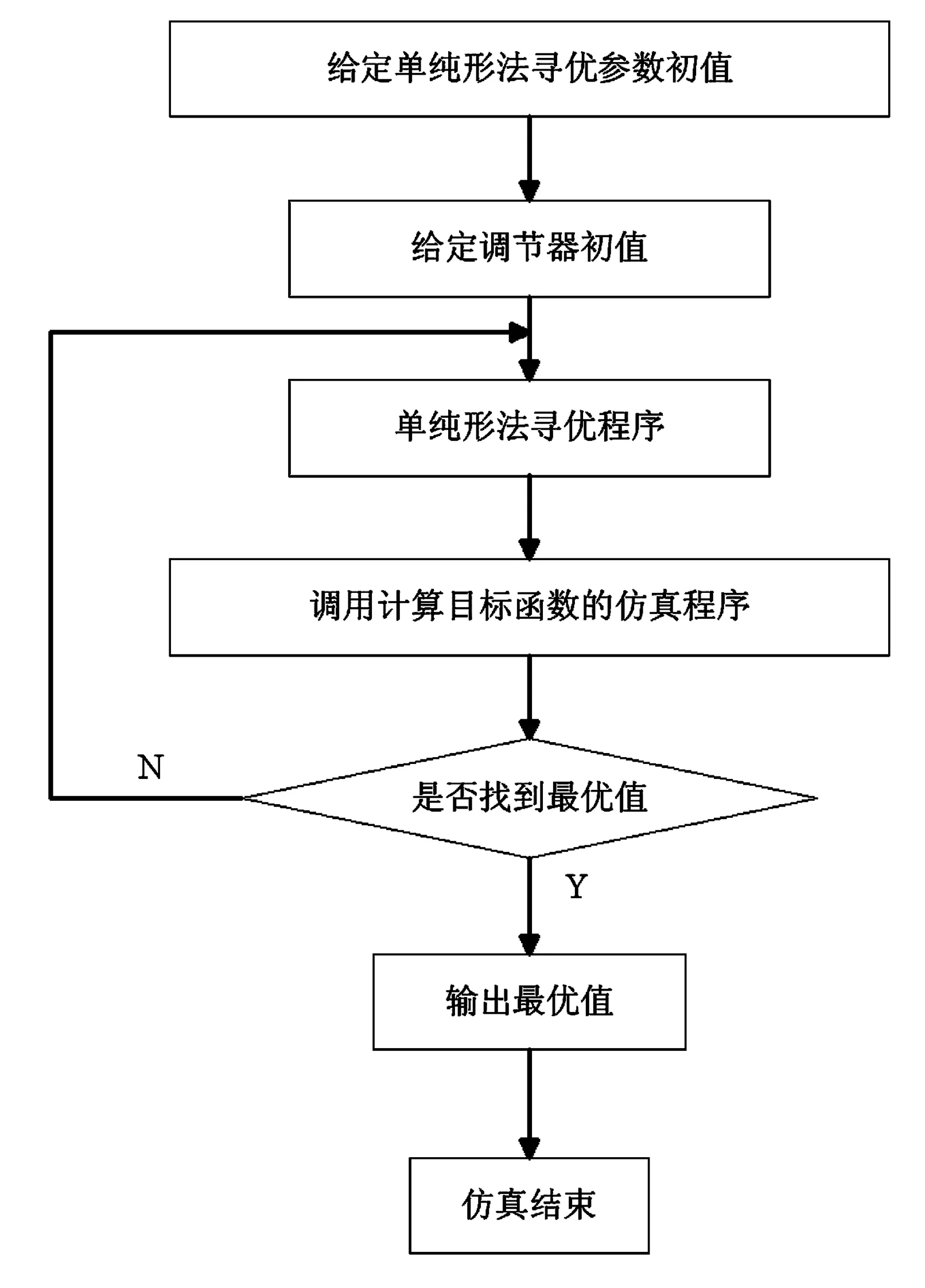
圖4 單純形法參數尋優程序框圖
3 仿真實驗結果分析
在SIMULINK中搭建EPS系統的仿真模型并進行仿真分析,如圖5所示.
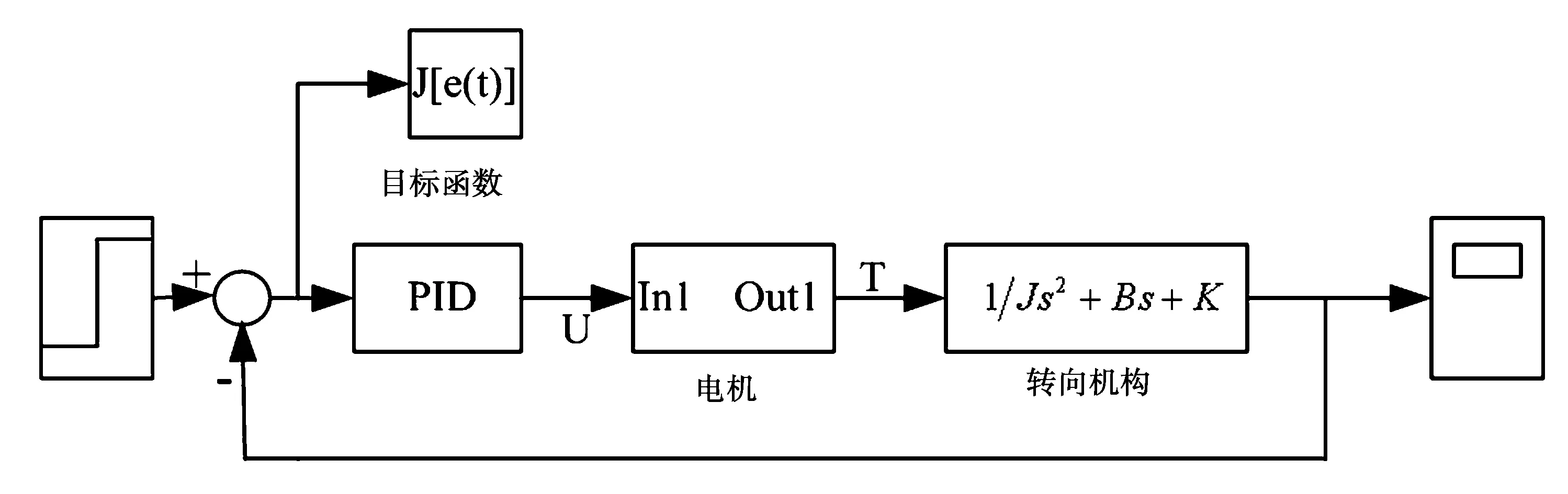
圖5 EPS系統仿真模型
在MATLAB的命令窗口中運行程序可以得到優化后的參數,如表1所示.

表1 目標函數優化后所得系統參數
當采用比例微分控制時,選取kp=20,kd=1.在原來機械轉向系統中加入了比例控制和比例微分控制,并分別用單純形法進行參數的優化設計.其仿真曲線如圖6所示,可以看出,優化后EPS系統的仿真曲線減小了超調量,系統的穩定時間也縮短了.仿真曲線結果表明EPS系統具有良好的跟蹤性和穩定性.
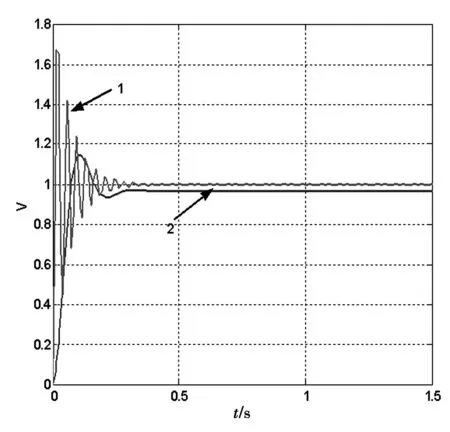
圖6 比例微分控制下系統的階躍響應(1是優化前,2是優化后)
4 結 論
EPS系統的助力性能直接關系到汽車的轉向操縱性能.EPS系統的助力性能影響轉向行駛的安全性,轉向助力性能的好壞是由跟蹤性與穩定性決定的.本文將單純形法的尋優原理與PID控制相結合應用于EPS控制系統,仿真結果表明,設計的PID參數優化控制器可使EPS系統具有良好的跟蹤性與穩定性,同時也為EPS系統的設計提供了理論依據.
[1]孟濤,陳慧,余卓平,等.電動助力轉向系統的回正與主動阻尼控制策略研究[J].汽車工程,2006, 28(12):1125-1128.
[2]趙萬忠,施國標.基于實時小波去噪方法的EPS電流跟蹤控制[J].汽車工程,2008,30(3):227-230.
[3]Ji-Hoon Kim, Jae-Bok Song.Control logic for an electric power steering system using assist motor[J].Mechatronics,2002,12(5):447-459.
[4]周洪彥,楊潤生,周發琳,等.模糊神經網絡在發電機勵磁控制中的應用[J].軍械工程學院學報, 2008, 20(5):58-62.
[5]尚喆,許鎮琳,王豪.基于神經網絡的電動轉向系統助力特性研究[J].汽車工程,2004,26(3):319-321.
[6]劉照,楊家軍,廖道訓.基于混合靈敏度方法的電動助力轉向系統控制[J].中國機械工程,2003(5):874-876.
[7]劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業出版社,2003:49-59.
[責任編輯:徐明忠]
Optimal simulation of EPS system parameter based on MatLab/Simulink
JIA Manman
(College of Physics and Electrical Information, Shangqiu Normal University, Shangqiu 476000,China)
PID control is used by most of the electric power steering controllers, parameters design of controllers is determined by making experiments again and again, so portability and flexibility of vehicle steerering is probably unable to achieve optimization.To deal with this situation, a method is presented for designing parameters of system controller using simplicity shape algorithm, and looking for self-optimizing objective function.Using matlab control toolbox to establish the system model and simulation experiments on simulink.The result of simulation experiments showed that using simplicity shape algorithm to design EPS controller can enormously improve the time domain performance, can improve portability and flexibility of vehicle steerering, and provide a theoretical basis for optimal design.
electric power steering; simplicity shape algorithm; PID; simulink simulation
2016-01-09
商丘師范學院青年科研基金(2011QN13);河南省教育廳科學技術研究重點項目(12B140012,13B140191).
賈滿滿(1983-),女,河南商丘人,商丘師范學院助教,碩士,主要從事控制理論與應用的研究.
TP391.9
A
1672-3600(2016)09-0030-03
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
