5-UPS/PRPU冗余驅動并聯機床彈性動力學分析
2016-09-05 05:35:29許允斗姚建濤鄭魁敬趙永生
中國機械工程 2016年9期
周 鑫 許允斗 姚建濤 鄭魁敬 趙永生
1.燕山大學河北省并聯機器人與機電系統實驗室,秦皇島,0660042.燕山大學先進鍛壓成形技術與科學教育部重點實驗室,秦皇島,066004
?
5-UPS/PRPU冗余驅動并聯機床彈性動力學分析
周鑫1,2許允斗1,2姚建濤1,2鄭魁敬1,2趙永生1,2
1.燕山大學河北省并聯機器人與機電系統實驗室,秦皇島,0660042.燕山大學先進鍛壓成形技術與科學教育部重點實驗室,秦皇島,066004
結合有限元法和子結構法建立了5-UPS/PRPU冗余驅動并聯機床的彈性動力學模型。首先,將系統劃分為不同的子結構,根據空間柔性梁理論求出單元動力學方程,根據關節特點將各個梁單元組裝成各個驅動分支;根據分支與動平臺的運動學/動力學約束,將各個分支進行裝配,從而得到系統動力學方程。以5-UPS/PRPU冗余驅動并聯機床作為算例,求出其動平臺中心的動態響應特性。通過比較5-UPS/PRPU冗余驅動并聯機床及5-UPS/PRPU非冗余驅動并聯機床動平臺的動態響應,可以得到結論:冗余驅動可以明顯改善該機床彈性動力學特性,從而減小因彈性變形引起的誤差。研究結果為結構設計人員進行結構設計及優化提供可靠的依據。
并聯機床;冗余驅動; 彈性動力學;動態特性比較
0 引言
并聯機器人具有剛度高、承載能力強以及模塊化程度高[1-3]等特點,廣泛應用于航空航天、國防軍事等領域。然而,由于并聯機器人的工作空間小、容易產生奇異位型等缺點,在實際生產中往往通過引入冗余驅動的概念去解決這些問題。
高速、輕型化是并聯機器人發展的主要趨勢。然而,當輕型化的機器人在重載且高速的環境下工作時,往往會由于各個分支的彈性變形影響其運動及動力學性能,從而降低機器人的精度。因此,有必要對并聯機器人進行彈性動力學分析,并通過結構優化提高其動力學特性。Liu等[4]通過考慮連桿的變形,分析了3-RRS并聯機構的動力學特性。胡俊峰等[5]提出了一種簡單而精確的彈性動力學建模方法,并通過實例進行了驗證。文獻[6-9]分別針對不同的機構建立了彈性動力學模型,并且進行了相應的動力學分析。陳修龍等[10]基于機構的彈性動力學模型提出了一種優化方法。Cammarata等[11]提出了一種約束優化方法,該方法改善了3T1R并聯機器人的彈性動力學性能;Alberto等[12]采用一種新的重力補償方法,分析了四桿機構的彈性動力學特性;Zhang等[13]以3-PRS為例,通過建立其彈性動力學模型提出了一種能夠分析其關節約束反力的方法。文獻[14-16]分別從結構、理論方法以及控制的角度對3-PRR 柔性并聯機器人進行了深入的分析。綜上所述,現有文獻大多針對非冗余驅動并聯機構進行彈性動力學分析,而對于冗余驅動并聯機構的分析并不多。Zhao等[17]比較了6-PSS與8-PSS冗余驅動并聯平臺的彈性動力學特性。除此之外,鮮有文獻對冗余驅動并聯機構的彈性動力學進行研究,對于通過將主動副代替被動副從而實現驅動冗余機構的相關研究更是鮮有報道。
本文對5-UPS/PRPU冗余驅動并聯機構的彈性動力學性能進行了分析。首先通過結合子結構法和有限單元法,建立了空間單元的彈性動力學模型;然后根據各個關節的運動特性,將單元動力學模型進行組裝,并根據機構的運動學/動力學約束,得到系統總體的彈性動力學模型;最后以相應的5-UPS/PRPU冗余驅動并聯機床為算例,通過與相應的5-UPS/PRPU非冗余驅動并聯機床動平臺中心的彈性位移進行比較,證明冗余驅動對機床性能的改善。
1 動力學建模
5-UPS/PRPU五自由度冗余驅動并聯機床如圖1所示,它由定平臺、動平臺以及6條驅動分支等組成。機床的加工運動可以通過5條結構相同的UPS驅動分支及PRPU分支(冗余分支)的移動副共同實現。各個移動副的運動主要通過滾珠絲杠/螺母實現。此外,沿動平臺中心的法線方向的轉動被PRPU分支所約束,因此,PRPU分支也可以稱為約束分支。R、U、S、P分別代表轉動副、虎克鉸、球副以及移動副。由于機床動平臺能夠實現運動的自由度數目是5,而驅動數目為6,故機床表示為5-UPS/PRPU五自由度冗余驅動并聯機床。
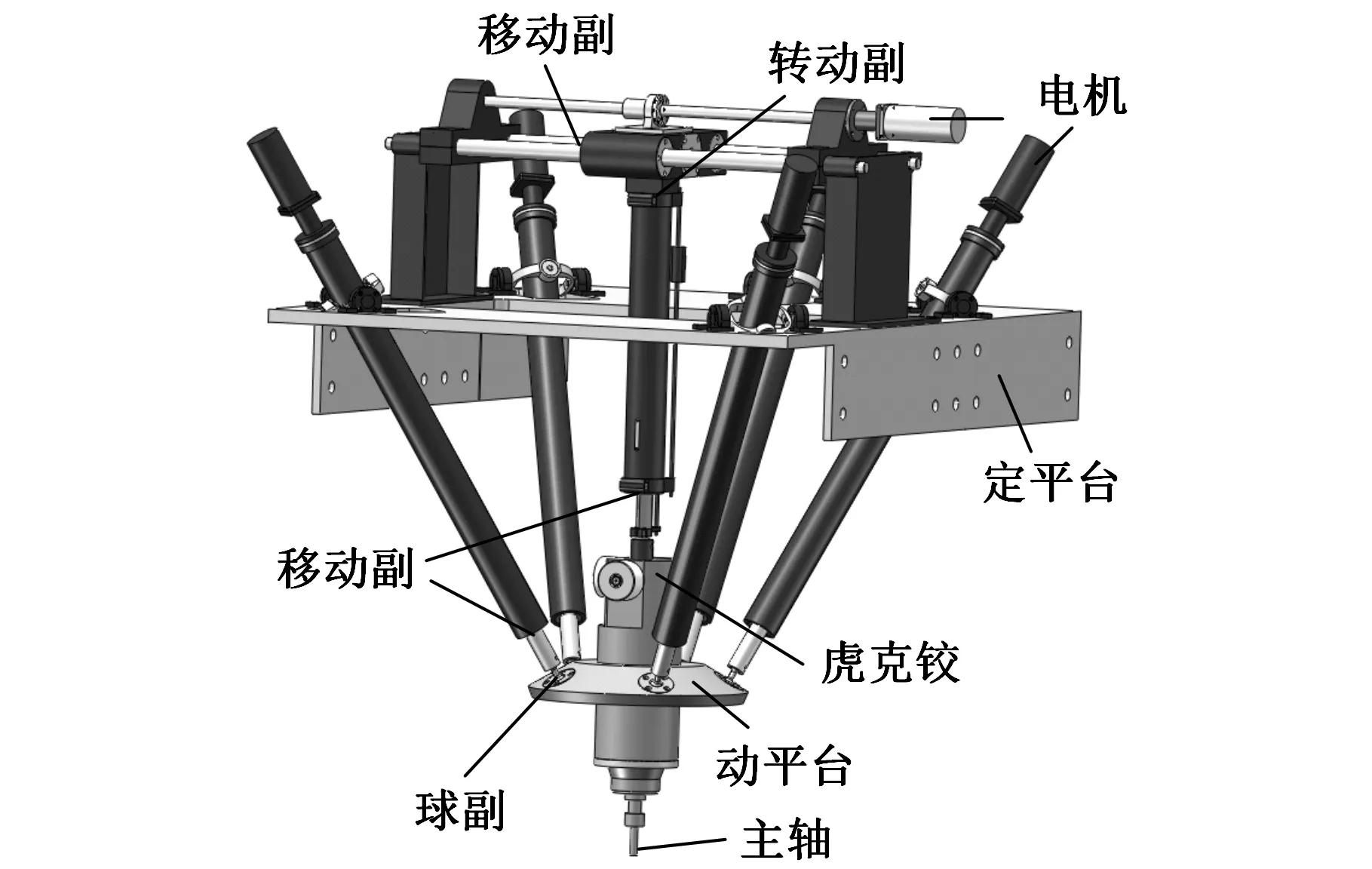
圖1 5-UPS/PRPU機床模型結構圖
機床結構簡圖如圖2所示。對于該冗余驅動五自由度并聯機床,由于機床動平臺以及定平臺剛度很大,故忽略其彈性變形,在此假設其為剛形體;由于滑塊剛度很大,同樣將其考慮成剛體,忽略其彈性變形。因此,在本文分析過程中考慮5個UPS驅動分支的彈性變形;另外,將PRPU分支的RPU分支部分視為彈性體。
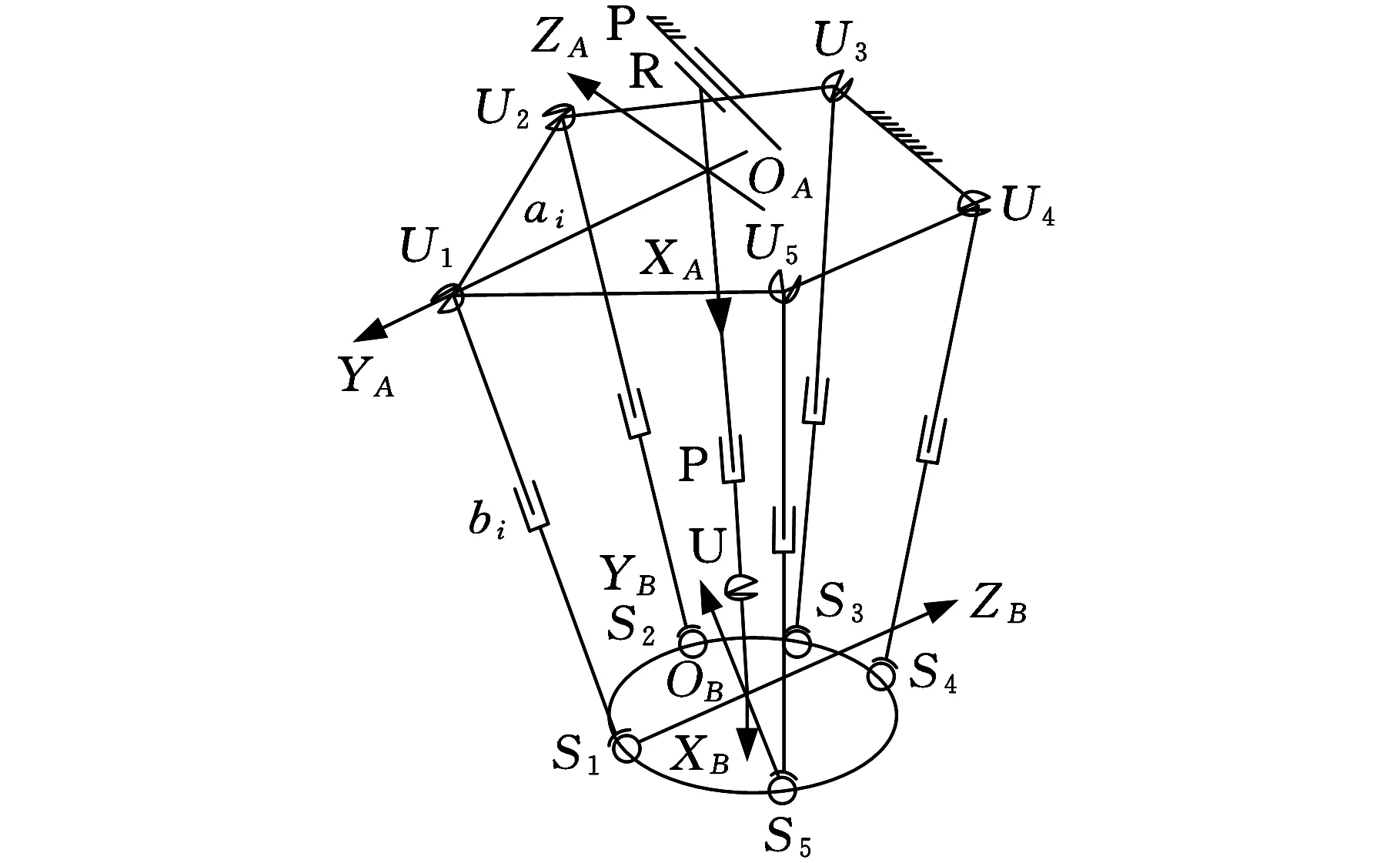
圖2 5-UPS/PRPU機床結構簡圖
1.1單元動力學方程
根據機床分支實際結構,將空間柔性梁單元模型等效為圓柱形截面,如圖3所示。該空間兩單元兩端坐標分別表示為δ1,δ2,δ3和δ10,δ11,δ12,δ4,δ5,δ6和δ13,δ14,δ15,δ7,δ8,δ9和δ16,δ17,δ18,即該梁單元的彈性位移、彈性轉角以及曲率。單元E′處的彈性位移以及彈性轉角可以表示為
(1)
式中,NT(x)為空間梁單元的位移形函數;δ為梁單元的廣義坐標,δ=[δ1δ2…δ18]。
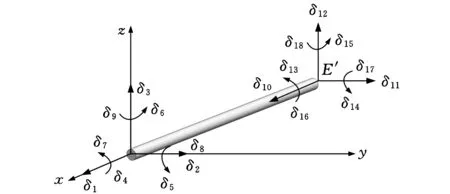
圖3 空間柔性梁單元模型
將空間梁單元的動能表示為
(2)
式中,L、ρ、A、IP分別為梁單元的長度、密度、截面面積以及慣性矩。
將空間梁單元的勢能表示為
(3)
式中,E、G、Iy、Iz分別為梁單元的拉壓彈性模量、剪切彈性模量以及對y軸和z軸的主慣性矩。
將式(2)、式(3)分別代入以下拉格朗日方程:
(4)
可以得到空間梁單元的動力學方程:
(5)
其中,Me、Ke分別為單元質量矩陣及單元剛度矩陣;Fe表示單元所受外力,包括梁單元實際受到的載荷、與其他單元的相互作用力以及其慣性力。1.2分支及動平臺的動力學方程[18]
首先分別將UPS分支以及PRPU分支等效為懸臂梁。對于PRPU分支,則將R0點考慮為固定端,故其彈性位移及轉角均為0;對于P0點,由于該點(移動副)鏈接的兩個單元分屬不同的構件,故應當設置不同的彈性位移;對于U0處(虎克鉸)可以等效成兩個匯交不共面的轉動副,所以,U0處對應的兩個曲率也為0。對于UPS分支,同樣將Ui(i=1,2,…,5)點考慮為懸臂梁的固定端,那么其彈性位移及轉角均為零;由于Pi點連接兩個不同的構件,故也設置不同的彈性位移;對應Si處為球鉸,因此,沿三個方向的曲率也為零。各個分支的系統坐標系設置如圖4所示。
對于PRPU分支,如果假設構件R0P0與坐標系R0xyz中的y軸夾角為θ01;對于各UPS分支,構件RiPi中的y、z軸夾角為θi2、θi3(i=1,2,…,5),那么,PRPU分支的局部坐標系與參考坐標系AXYZ的旋轉變換矩陣即可表示為
(6)
UPS分支的局部坐標系與參考坐標系AXYZ的旋轉變換矩陣可以表示為
(7)
可以根據分支局部坐標系與參考坐標系的旋轉變換矩陣將空間梁單元組裝成支鏈,并且完成相應坐標系的轉換。那么,機床各個分支的動力學方程可以表示為
(8)
U0=[u1u2…u22]T
Ui=[ui1ui2…ui21]Ti=1,2,…,5
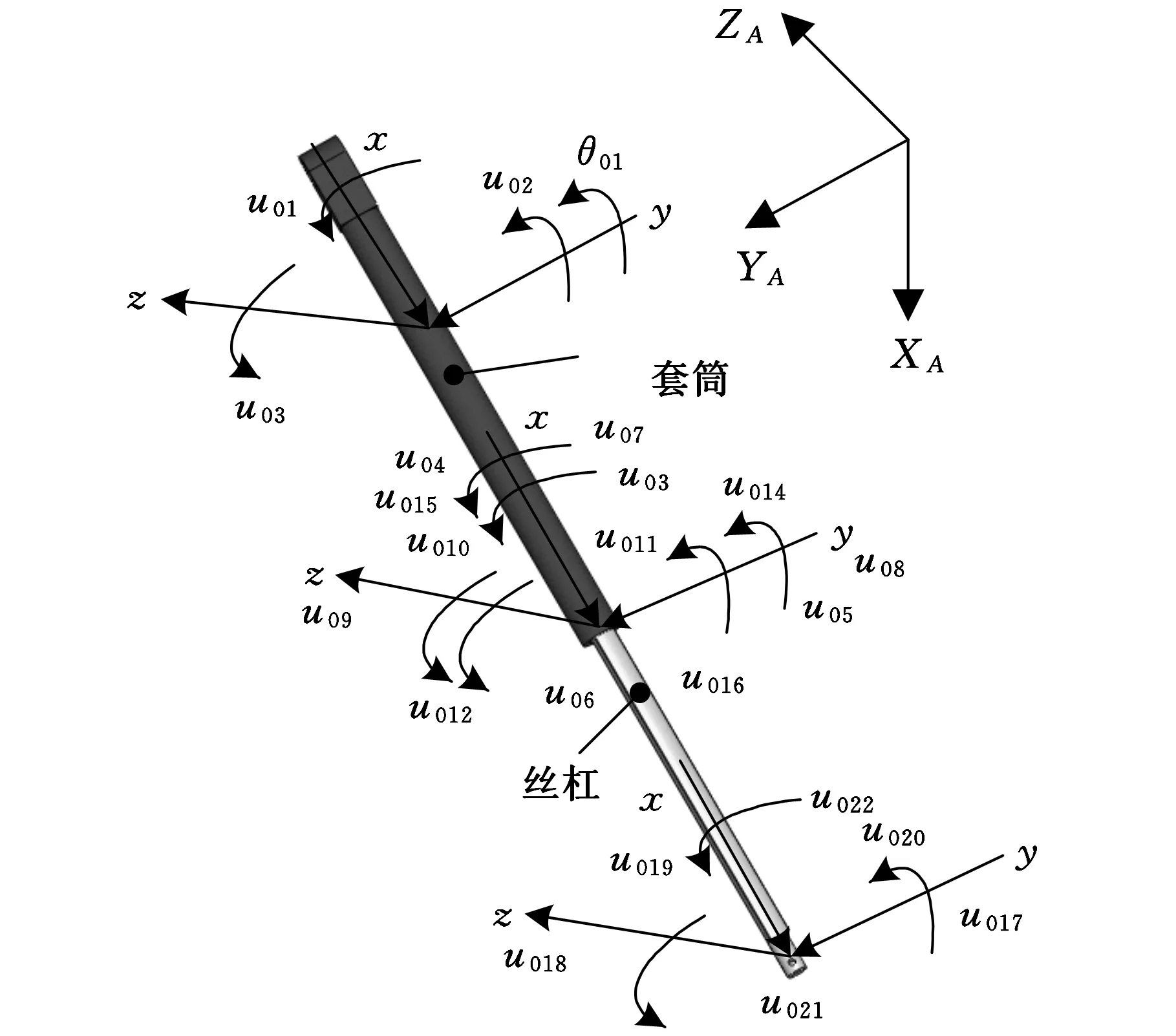
(a)PRPU分支在參考坐標下的廣義坐標
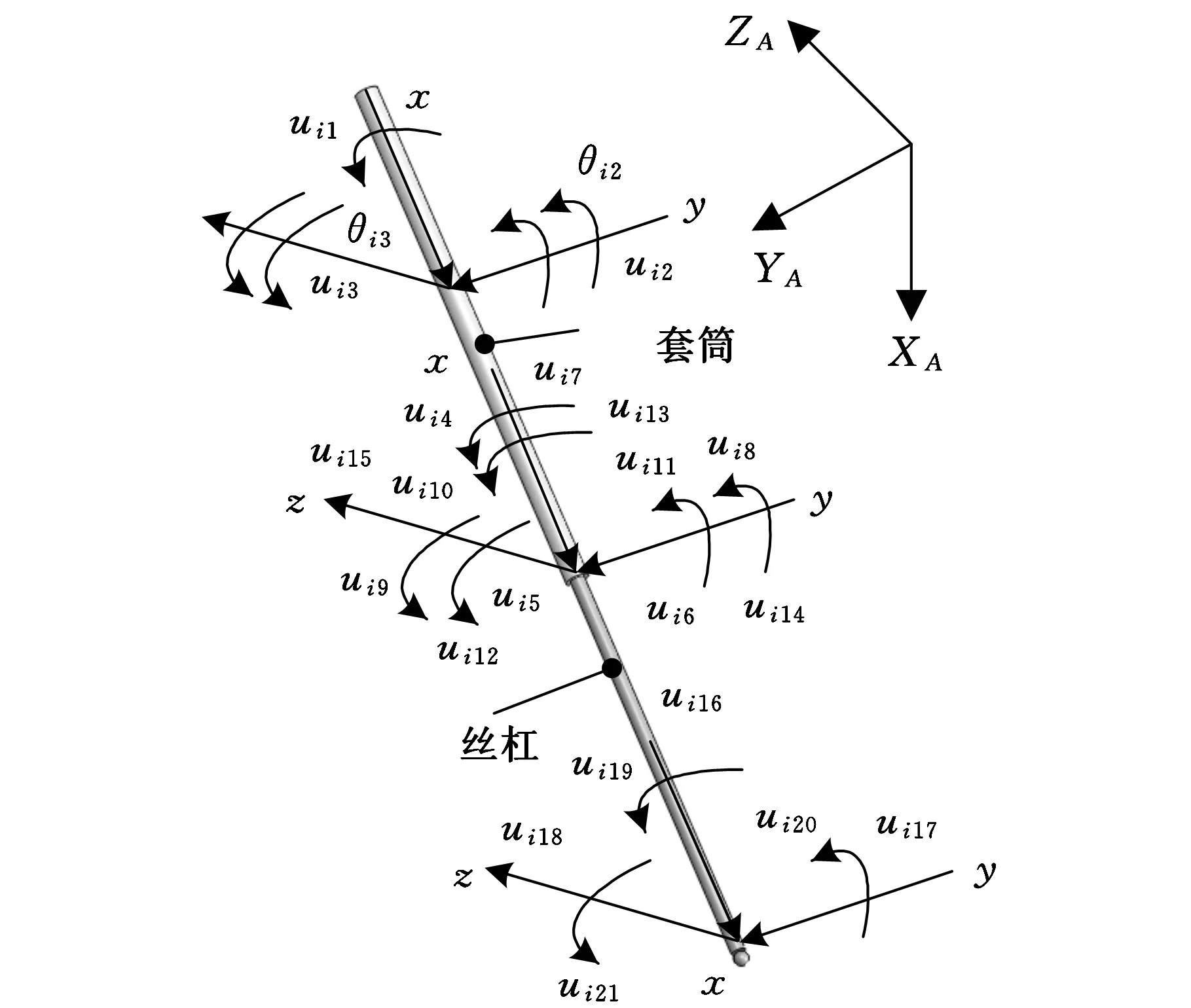
(b)UPS分支在參考坐標下的廣義坐標圖4 分支在參考坐標系下的廣義坐標
其中,Mi、Ki、Fi分別為分支的質量矩陣、剛度矩陣以及分支所受的外載荷向量。U表示由各個分支在參考坐標系中的坐標所組成的向量。
1.3動平臺動力學方程
根據前文的假設,由于動平臺的剛度很大,故考慮成剛體,則動平臺與各個驅動分支連接結點不是獨立的。因此,假設動平臺與各個驅動分支連接結點一致,且各驅動分支對動平臺的力與作用在動平臺的外力相平衡,由此可以分別得到系統的運動學約束方程及其動力學方程。
根據對動平臺的動力學分析作為系統的動力學約束,有
(9)

1.4系統動力學方程的裝配
將分支系統中的質量矩陣、剛度矩陣分解成以下形式:
通過將各個分支動力學方程(式(8))與動平臺動力學方程(式(9))結合,再結合文獻[19]中的運動約束方程即可得到5-UPS/PRPU冗余驅動并聯機床整體彈性動力學方程:
(10)
U=[U0U1…U5u1u2…u6]T
C=λ1M+λ2K
M=
式中,M、C、K分別為系統的整體質量矩陣、阻尼矩陣以及剛度矩陣;F為系統所受到的外力的合力;λ1、λ2分別為系統的剛度阻尼及其質量阻尼的系數。
構造冗余驅動并聯機構的方法有三種:①將被動運動副替換為主動運動副,即關節式的冗余驅動;②支鏈式的冗余驅動,即通過添加一條或多條驅動支鏈從而使機構的實際驅動鏈數目超過其運動所需的支鏈數目;③以上兩種方法的綜合。5-UPS/PRPU冗余驅動并聯機床屬于第一種類型,即通過添加冗余電機從而構造出冗余驅動。值得注意的是,冗余電機的添加,使得整個系統具有6個驅動輸入。理論上而言,機床的任意位姿都對應著無窮多組解。因此,在確定各個分支的驅動力時,允許根據不同的優化目標通過采用不同的優化算法優化機床分支的驅動力。考慮到實際的加工問題,本文采用文獻[20]中的優化方法,根據達朗伯原理求解冗余分支的驅動力,從而以使冗余分支的大滑塊能夠更好地跟隨動平臺運動為優化目標。另外,對于非冗余驅動并聯機床的驅動力,則可根據拉格朗日方程直接求出。機床剛體動力學的部分不再贅述。
2 動態響應分析
2.1機床動態響應特性分析
為了分析系統的動態響應特性,令5-UPS/PRPU五自由度冗余驅動并聯機床的動平臺中心的運動軌跡為
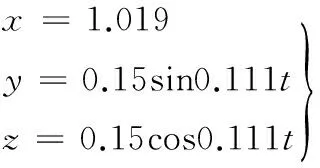
(11)

(12)
可以根據式(10)求出系統的動態響應特性。機床的基本尺寸及結構參數見表1~表3。
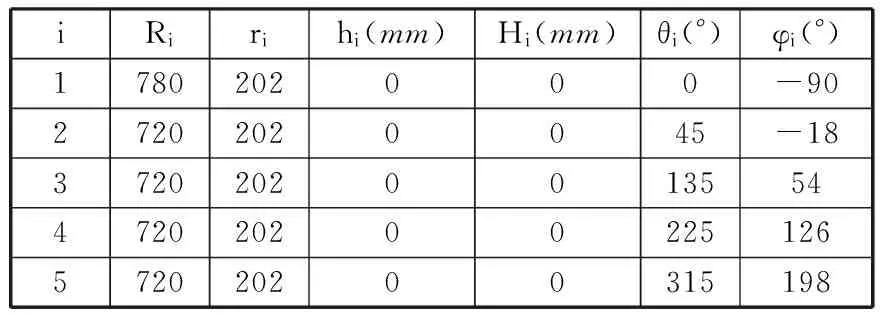
表1 機床基本結構參數
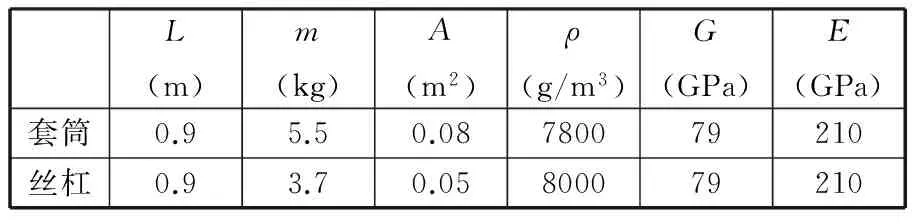
表2 UPS 分支基本結構參數
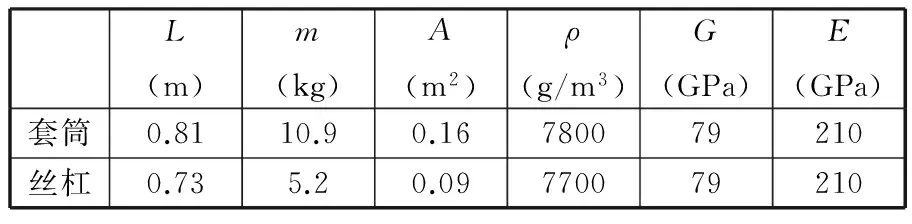
表3 PRPU 分支基本結構參數
動平臺的質量為45 kg, 密度為 7800 kg/m3, 剪切彈性模量為79 GPa, 拉壓彈性模量為210 GPa。
為了比較機床在冗余驅動與非冗余驅動的動態響應特性,分別計算了5-UPS/PRPU冗余驅動并聯機床與其相應的5-UPS/PRPU非冗余驅動并聯機床動平臺中心的彈性位移以及對應的剛性位移。如圖5~圖10所示,實線部分表示冗余驅動并聯機床動平臺中心的彈性位移,虛線部分表示非冗余驅動并聯機床動平臺中心的彈性位移。
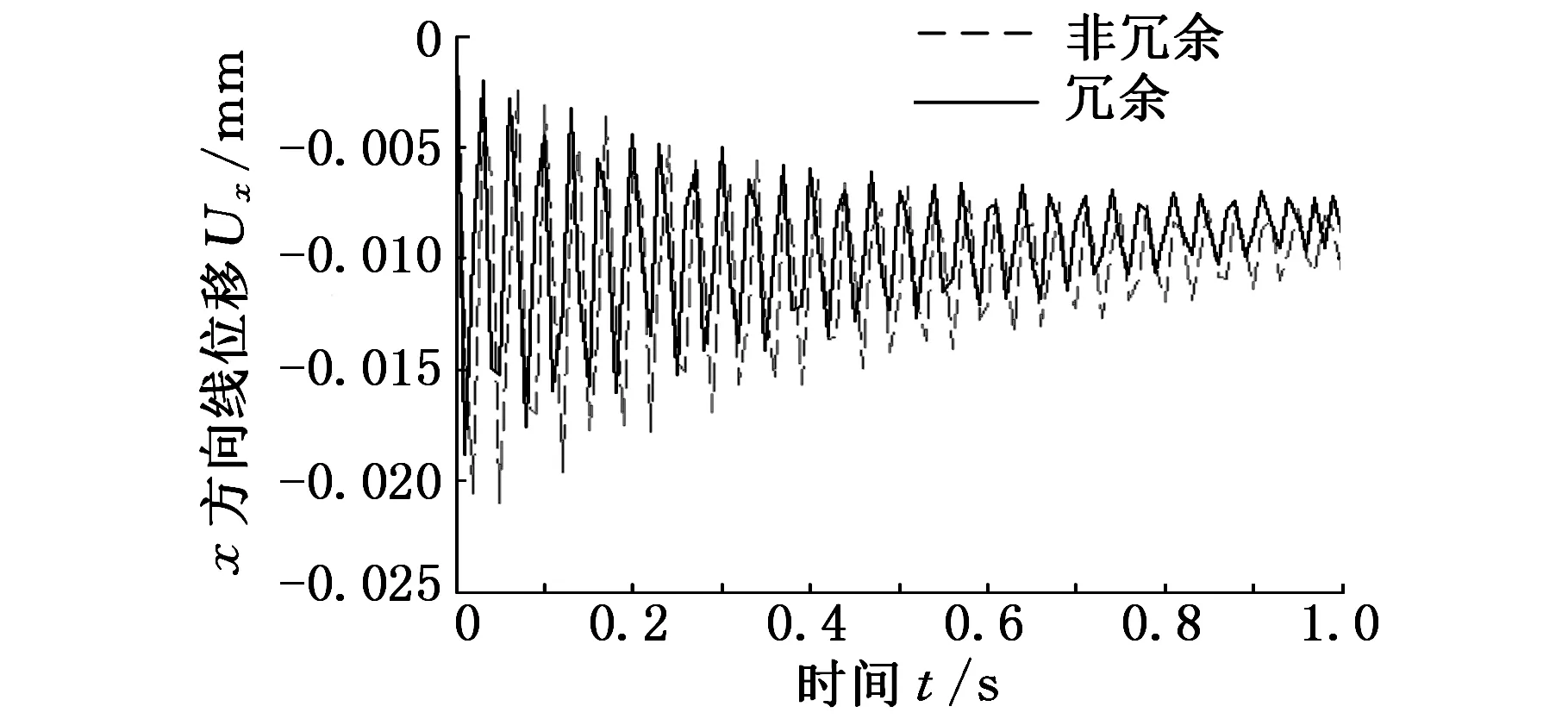
圖5 沿x軸方向的線位移
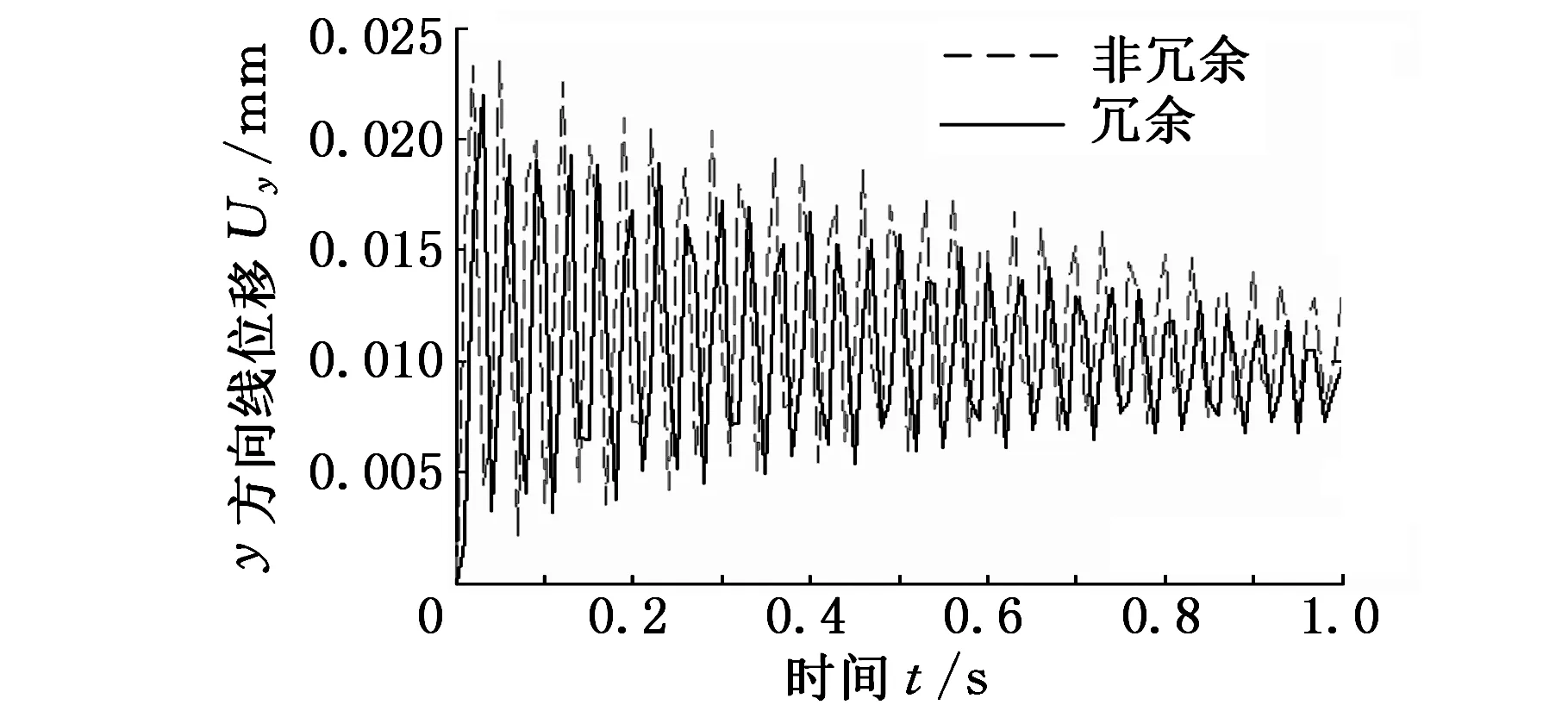
圖6 沿y軸方向的線位移

圖7 沿z軸方向的線位移
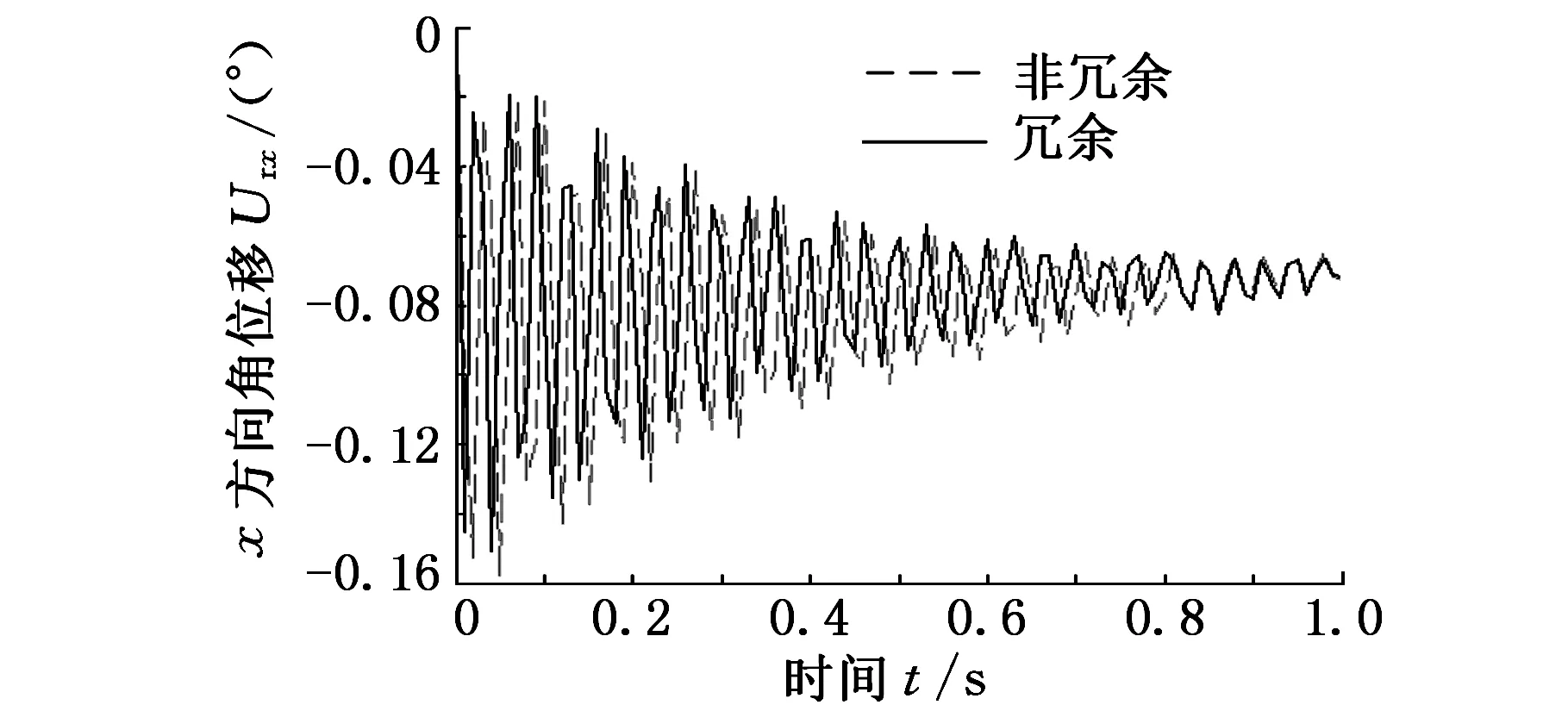
圖8 沿x軸方向的角位移
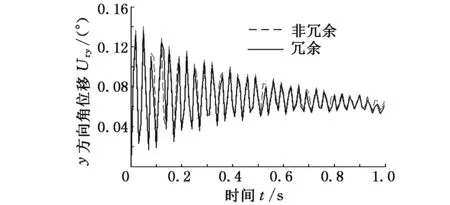
圖9 沿y軸方向的角位移
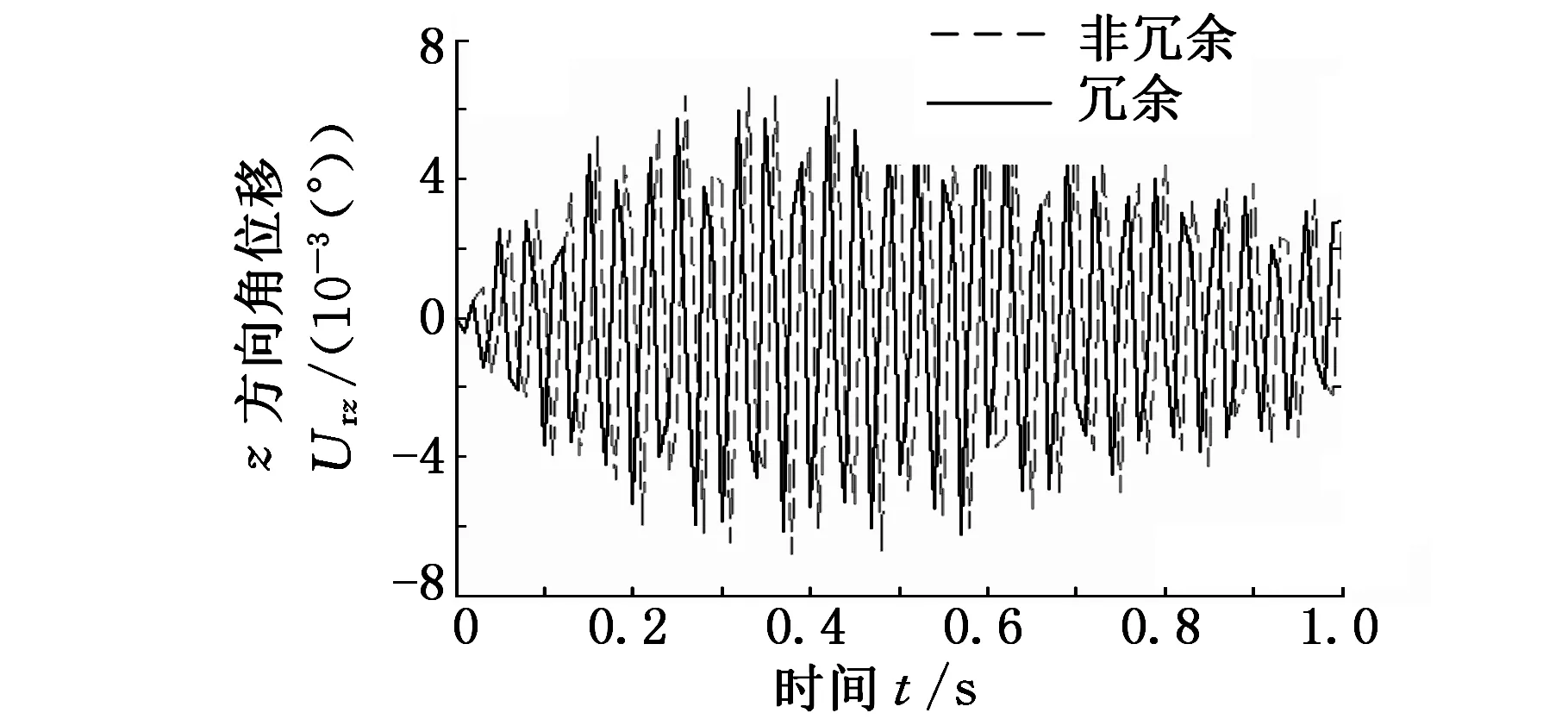
圖10 沿z軸方向的角位移
比較分析圖5~圖10可知冗余驅動對機床整體動態響應的影響情況。對于冗余驅動并聯機床,由分支變形引起平臺中心在x、y、z方向的線/角位移的最大誤差值分別為-0.0189 mm、0.0219 mm、0.1008 mm; -0.1507°、 0.1361°、0.0064°。而對于非冗余驅動并聯機床,各個方向的最大誤差值分別為-0.021 mm、0.0236 mm、0.1114 mm;-0.1581°、0.1403°、0.0068°。由此可見,無論是對于冗余驅動還是非冗余驅動并聯機床,最大移動誤差均沿z方向,轉動方向的最大誤差值均沿x方向。除此之外,可以看出該冗余驅動并聯機床在x、y、z三個方向的移動誤差及x、y方向的轉動誤差均小于其非冗余驅動并聯機床,且最大移動誤差減小了0.0106 mm, 最大轉動誤差減小了0.042°。因而可以得出冗余驅動可以改善機床的動態響應特性的結論。
需要說明的是,由于各個方向的實際位移均以某一數值為中心往復波動,說明其動平臺中心點由于各個驅動分支變形所引起的彈性位移是以某一點為中心的彈性振動。
2.2仿真驗證
該冗余驅動并聯機床的固有頻率由下式得到:
det(-ω2M+K)=0
(13)

圖11 冗余驅動并聯機床各階固有頻率仿真結果
通過觀察式(13)不難發現,該機床的整體質量矩陣和剛度矩陣均與機床的位姿相關,因此,計算了機床在不同位姿下的固有頻率,并通過有限元軟件中的模態分析進行驗證。圖11所示為機床在初始位姿時各階固有頻率在有限元仿真軟件中的計算結果,比較分析可知,本文理論模型所得結果與有限元仿真結果的變化趨勢一致,可以在一定程度上證明本文模型的有效性。
3 結論
(1)本文結合有限單元法與子結構法推導了5-UPS/PRPU冗余驅動并聯機床的彈性動力學模型。
(2)比較了5-UPS/PRPU冗余驅動并聯機床與其非冗余驅動并聯機床的動態響應特性。
(3)冗余驅動可以在一定程度上改善冗余驅動并聯機床的動態響應特性。此外,可以采用本文的方法對系統結構進行優化;通過理論分析找到機床誤差最小的位置,從而進行軌跡規劃,提高機床加工精度。
[1]馬立,謝煒,劉波,等. 柔性鉸鏈微定位平臺的設計[J]. 光學精密工程, 2014,22(2):338-345.
MaLi,XieWei,LiuBo,etal.DesignofMicro-positionStagewithFlexureHinge[J].OpticsandPrecisionEngineering,2014, 22(2):338-345.
[2]呂幫俊,朱石堅,彭利坤,等.Stewart機構剛度映射建模與仿真[J]. 振動與沖擊,2011,30(4):178-181.
LüBangjun,ZhuShijian,PengLikun,etal.StiffnessMappingModelingandSimulationforStewartMechanism[J].JournalofVibrationandShock,2011,30(4):178-181.
[3]RizkR,MunteanuM,FaurouxJC,etal.AComparativeStiffnessAnalysisofaReconfigurableParallelMachinewithThreeorFourDegreesofMobility[J].JournalofMachineEngineering,2006,6(2):45-55.
[4]LiuShanzeng,YuYueqing,ZhuZhencai,etal.DynamicModelingandAnalysisof3-RRSParallelManipulatorwithFlexibleLinks[J].JournalofCentralSouthUniversity, 2010, 17:323-331.
[5]胡俊峰,張憲民,朱大昌,等.柔性并聯機器人動力學建模[J].農業機械學報,2011,42(11):197-202.
HuJunfeng,ZhangXianmin,ZhuDachang,etal.DynamicModelingofFlexibleParallelRobot[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2011, 42(11):208-213.
[6]杜兆才,余躍慶,張旭平,等.平面柔性并聯機器人動力學建模[J].機械工程學報,2007,43(9): 96-101.
DuZhaocai,YuYueqing,ZhangXuping,etal.DynamicModelingofPlanarFlexibleParallelManipulators[J].ChineseJournalofMechanicalEngineering,2007,43(9):96-101.
[7]韓亞鋒,馬履中,吳偉光,等.Delta并聯機器人彈性動力學研究[J].農業機械學報,2011,42(10):197-202.
HanYafeng,MaLüzhong,WuWeiguang,etal.ElasticDynamicAnalysisofDeltaParallelRobot[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2011, 42(10):197-202.
[8]張清華, 張憲民. 平面3-RRR和3-PRR柔性并聯機器人彈性動力學分析[J]. 華南理工大學學報(自然科學版), 2012, 40(11):52-57.
ZhangQinghua,ZhangXanmin.ElastodynamicAnalysisofPlanar3-RRRand3-PRRFlexibleParallelRobots[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition), 2012, 40(11) :52-57.
[9]張清華, 張憲民.平面3-RRR柔性并聯機器人動力學建模與分析[J].振動工程學報, 2013, 26(2):239-245.
ZhangQinghua,ZhangXanmin.DynamicModelingandAnalysisofPlanar3-RRRFlexibleParallelRobots[J].JournalofVibrationEngineering,2013,26(2): 239-245.
[10]陳修龍, 張中供, 鄧昱.空間并聯機構彈性動力學優化設計[J].農業機械學報, 2014, 45(9): 318-323.
ChenXiulong,ZhangZhonggong,DengYu.Elasto-dynamicsOptimalDesignofSpatialParallelMechanism[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2014, 45(9): 318-323.
[11]CammarataA,SinatraR.ElastodynamicOptimizationofa3T1RParallelManipulator[J].MechanmismandMachineTheory, 2014,73:184-196.
[12]AlbertoM,MarcoT,MarcoC,etal.ElastodynamicBehaviorofBalancedClose-loopMechanisms:NumercalAnalysisofaFour-barLinkage[J].Meccanica, 2014,49(3):601-614.
[13]ZhangJun,ZhaoYanqin.ElastodynamicModelingandJointReactionPredictionfor3-PRSPKM[J].JournalofCentralSouthUniversity, 2015, 22(8):2971-2979.
[14]PirasG,CleghornWL,MillsJK.DynamicFiniteElementAnalysisofaPlanarHigh-speed,Hign-precisionParallelManipulatorwithFlexibleLinks[J].MechanismandMachineTheory, 2005, 40(7): 849-862.
[15]WangXiaoyun,MillsJK.DynamicModelingofaFlexible-linkPlanarParallelPlatformUsingaSubstructuringApproach[J].MechanismandMachineTheory, 2006,41(6):671-687.
[16]Wang Xiaoyun, Mills J K. A FEM Model for Active Vibration Control of Flexible Linkages[C]//Proceding of IEEE International Conference on Robotics and Automation.Piscataway, 2004: 4308-4313.
[17]Zhao Yongjie, Gao Feng, Dong Xingjian,et al.Elastodynamic Characteristics Comparison of the 8-PSS Redundant Parallel Manipulator and Its Non-redundant Counterpart-the 6-PSS Parallel Manipulator[J].Mechanism and Machine Theory, 2010,45(2):291-303.
[18]Wang Dan, Fan Rui, Chen Wuyi. Stiffness Analysis of a Hexaglide Parallel Loading Mechanism[J].Mechanism and Machine Theory, 2013, 70(6): 454-473.
[19]劉善增.三自由度柔性并聯機器人動力學研究[D].北京:北京工業大學,2009.
[20]程麗.五自由度并聯機床冗余驅動理論與實驗研究[D].秦皇島:燕山大學,2009.
(編輯陳勇)
Elastodynamics Analysis of a 5-UPS/PRPU Redundantly Actuated Parallel Machine Tool
Zhou Xin1,2Xu Yundou1,2Yao Jiantao1,2Zheng Kuijing1,2Zhao Yongsheng1,2
1.Parallel Robot and Mechatronic System Laboratory of Hebei Province,Yanshan University,Qinhuangdao,Hebei,066004 2.Key Laboratory of Advanced Forging & Stamping Technology and Science of Ministry of National Education,Yanshan University,Qinhuangdao,Hebei,066004
An elastodynamics model of the 5-UPS/PRPU redundantly actuated PMT was derived by combining the finite element model and substructure synthesis techniques herein. Firstly, the overall system was divided into different substructures. According to the theory of spatial beam element, the dynamics equation of the spatial beam element was derived, and then assembling into different driving limbs; according to the dynamic constraints and kinematic constraints among the moving platform and each driving limbs, the dynamics equation of the overall system might be obtained by assembling the dynamics equation of the driving limbs. The 5-UPS/PRPU redundantly actuated PMT was set as an example to illustrate the derivation of the dynamic response of the moving platform. At last, by comparing the dynamic response of the redundantly actuated PMT and its non-redundant PMT, it can be concluded that: the elastodynamics performance of the PMT may be improved by the actuation redundancy, so that the errors caused by the driving limb deformations can be reduced as well. The research provides a theoretical reference of the structure design and optimization for the designers.
parallel machine tool(PMT); actuation redundancy; elastodynamics; dynamic performance comparison
2015-11-06
國家自然科學基金資助項目(51275439);燕山大學青年教師自主研究計劃資助項目(13LGA001)
TP394.1;TH691.9
10.3969/j.issn.1004-132X.2016.09.001
周鑫,男,1988年生。燕山大學機械工程學院博士研究生。主要研究方向為并聯機器人理論及其應用。許允斗,男,1985年生。燕山大學機械工程學院講師。姚建濤,男,1980年生。燕山大學機械工程學院副教授。鄭魁敬,男,1971年生。燕山大學機械工程學院副教授。趙永生(通信作者),男,1962年生。燕山大學機械工程學院教授、博士研究生導師。