基于國產高分遙感影像的城鎮生活垃圾監管方法研究
2016-09-03 11:38:36住房和城鄉建設部信息中心秦海春
中國建設信息化 2016年4期
文|住房和城鄉建設部信息中心 秦海春
1 引言
隨著我國城鎮化快速發展,不斷增長的人口規模對城市基礎設施的承載能力提出越來越高的要求。以生活垃圾為例,城市核心區內的生活垃圾目前可以實現市政的統一收集和統一處理。但在城市周邊,尤其是在城郊結合地帶,由于發展快、責任不明確、收集和處置成本高等因素,易形成一些長期無人處理的垃圾堆放點,長期露天堆放易對周邊的大氣、水體形成污染,形成社會廣泛關注的“垃圾圍城”現象。
本課題通過利用國產高分辨率對地遙感數據,對無錫市及其周邊地區進行連續監測,根據規模較大垃圾堆點的遙感特征建立識別模型,自動識別疑似目標,輔以人工識別對疑似目標進行篩選。通過現場信息采集驗證提取結果,進一步完善提取模型,探索形成基于國產高分遙感數據的城鎮生活垃圾監測方法,為有效發現和消除城鎮周邊的無主垃圾堆點做出貢獻。
2 數據準備
本課題研究使用2015年8月2日高分二號衛星的影像數據,包括1m分辨率全色波段數據和4m分辨率多光譜數據,參數見表1:
對基礎影像數據進行了處理,包含幾何精校正、輻射校正、影像融合、影像拼接以及裁切。在融合環節中,將1m分辨率全色波段數據和4m分辨率多光譜數據進行融合,成果數據集成多光譜和高分辨率的特性。

表1 高分二號衛星數據參數
3 分析方法
3.1 垃圾堆解譯標志
根據部分已知垃圾堆放點的分布位置與影像特征,可以建立起垃圾堆放點在遙感影像圖上的解譯標志,主要的特征包括顏色、紋理、形狀、尺寸以及地理位置等[1]。圖1是研究區的典型垃圾堆放點的遙感影像圖。

圖1 典型垃圾堆的遙感影像圖
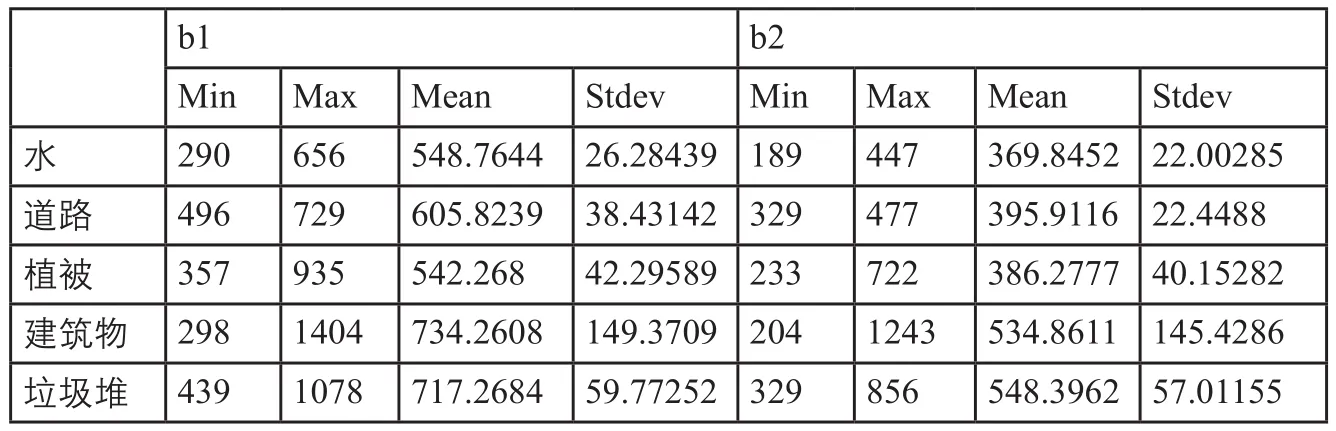
表2 五類訓練樣本在b1、b2波段的光譜亮度值

表3 五類訓練樣本在b3、b4波段的光譜亮度值
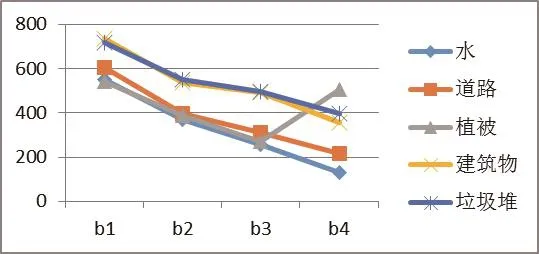
圖2 五類地物在四個波段的亮度均值響應曲線
由于垃圾堆放處通常由多類垃圾組成,導致影像多呈現發白發虛,且顏色一般不均勻的特征。而生活垃圾中存在較多的塑料袋,導致其光譜反射率較高,在影像上往往呈現高亮白色。堆放時間過長的垃圾堆,表面可能會有土覆蓋,但仍混雜著灰白色物體。
垃圾堆表面紋理結構明顯,表面灰白相間,紋理比較粗糙。
垃圾堆的形狀一般不規則,與周邊地物的邊界比較模糊,呈堆積狀分布,有明顯的立體狀,表面凹凸不平。
垃圾堆的尺寸無特定規律,且尺寸可能差異較大。
生活垃圾一般堆積在居民區周圍的空地上,往往有小路連接且小路到此中斷[2],還可能分布在近郊的公路邊、河邊以及土坑中。
3.2 垃圾堆光譜特征分析
在遙感圖像計算機的分類實踐中,訓練區選擇對分類精度的好壞有重要影響。選擇訓練區的主要原因是為了估計每一地物類型的光譜分布統計特征參數。我們選取5類具有代表性的訓練樣本進行提取分析,分別是水、道路、植被、建筑物和垃圾堆。
我們提取這五類地物的訓練樣本在高分遙感影像各個波段的光譜亮度值,并進行統計。如表2、表3所示:
根據同一類訓練樣本數據在不同波段上的光譜亮度最小值、最大值、平均值以及均值統計數據,生成這五類地物的亮度響應曲線。我們發現利用最大值、最小值、平均值統計數據生成的亮度響應曲線,垃圾堆與水、道路、建筑物、植被這四類地物在這四個波段中沒有很明顯的區分開,而利用均值統計數據后,生成的亮度均值響應曲線,在第二波段能很明顯的區分出來,如圖2所示:
3.3 決策樹分類
決策樹方法是目前應用最廣泛的歸納推理算法之一,是一種逼近離散值函數的方法,該算法采用的是一種二分遞歸分割技術,即將當前樣本集分割成兩個子樣本集,使生成的決策樹的每一個非葉子節點都有兩個分支, 最后生成結構簡單的二叉樹[3]。技術路線如圖3所示:
我們通過訓練樣本分析出來的5類地物在四個波段的亮度均值響應曲線,可以看到在b2波段時,建筑物和垃圾堆能明顯的與水、道路、植被這三類地物區分出來,下一步就是建筑物與垃圾堆的區分,這里我們將用到SAVI指數[4]。
SAVI定義為:

其中ρR為紅光波段的反射率,ρNIR為近紅外波段反射率,L取值0.5。
與歸一化差異植被指數NDVI相比,SAVI增加了土壤調節系數L,可用其來解釋背景的光學特征變化,并且修正NDVI對土壤背景的敏感。最適合于研究低植被覆蓋區,如城市建成區。通過設置SAVI閾值可將垃圾堆與建筑區分開來,本研究在研究區選擇足夠數量的訓練樣本,對垃圾堆的SAVI值與建筑物SAVI值進行統計分析,最終確定-0.3至-0.2為垃圾堆,否則為建筑物。
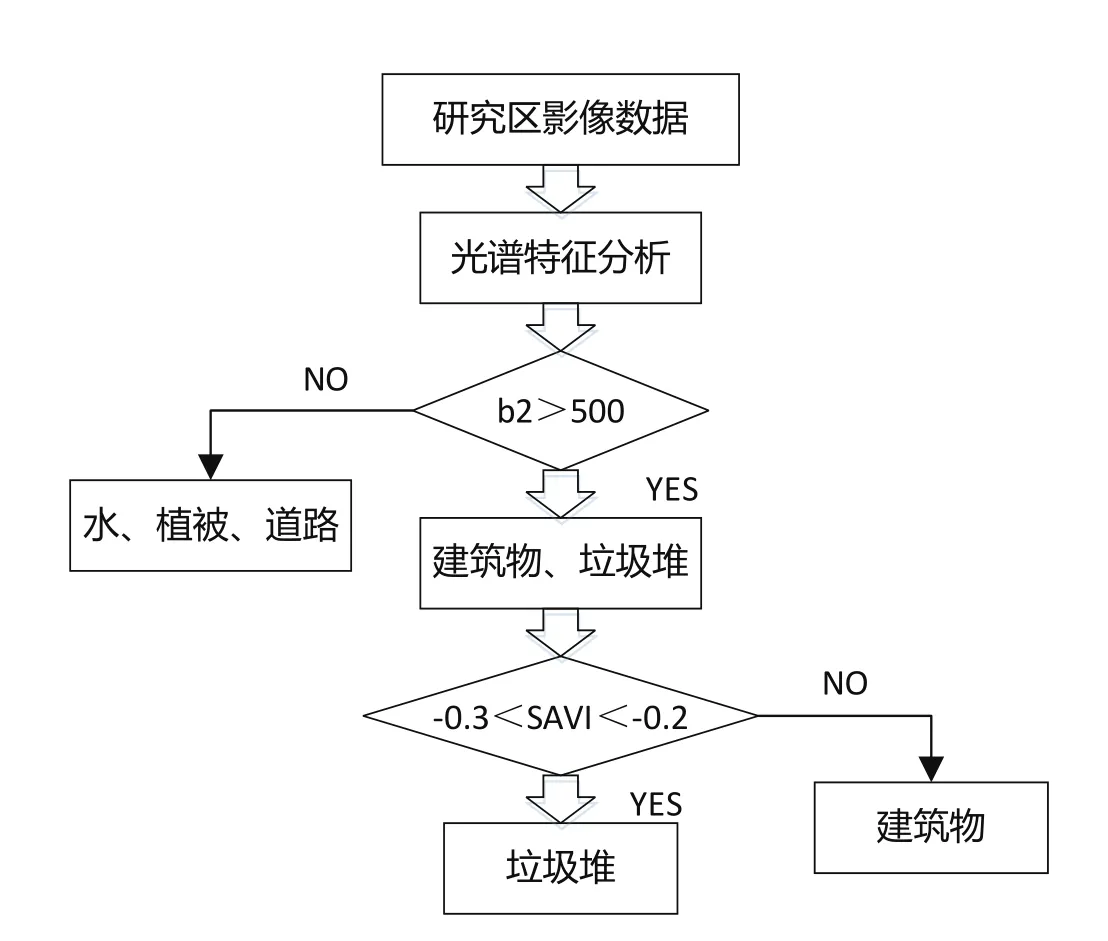
圖3 技術路線
決策樹分類的結果中垃圾堆與建筑物容易發生混淆,但是由于建筑物的形狀特征比較規則,而垃圾堆放點的形狀非常不規則,我們還需進一步借助3.1中建立的解譯標志進行垃圾堆人機交互提取,過濾掉錯分的建筑物信息,確定垃圾堆放點的分布情況。
3.4 結果驗證
通過基于高分遙感影像數據的提取和識別,課題組在無錫市周邊發現多處疑似垃圾堆放點,經相關部門篩選過濾后,課題組赴現場進行了信息采集,確認為垃圾堆放點,這些垃圾堆放點主要分布在新建小區和村鎮周邊,主要由居民生活垃圾和建筑垃圾構成,如圖4所示:

圖4 垃圾堆
4、結論
本文基于高分二號遙感影像數據,對無錫市垃圾堆放點進行識別分析。通過研究發現,采用目視特征在高分遙感數據上判讀城市垃圾位置需要非常大的時間和人力,對城市垃圾的監管效率不高。采用光譜影像特征,結合決策樹分類方法進行垃圾堆放點的自動識別提取,雖然很多城市垃圾容易與裸土和建筑物發生混淆,但通過此方法,可快速提取疑似目標地物的位置,再通過人工目視和實地驗證,提高城市垃圾監管效率。此外,城市垃圾自身具有復雜性,同時實驗缺乏大量的實際垃圾堆數據的支持,研究方法還需完善,提取精度有待進一步提高。
