MMC控制策略比較分析研究
2016-08-30 05:58:09李威李庚銀
電機(jī)與控制學(xué)報 2016年8期
關(guān)鍵詞:模型
李威, 李庚銀
(華北電力大學(xué) 新能源電力系統(tǒng)國家重點實驗室,北京 102206)
?
MMC控制策略比較分析研究
李威,李庚銀
(華北電力大學(xué) 新能源電力系統(tǒng)國家重點實驗室,北京 102206)
為了研究MMC的控制算法,將模型預(yù)測控制應(yīng)用于MMC系統(tǒng)中,為了獲得更好的控制效果,在模型預(yù)測控制中引入了死區(qū)補(bǔ)償;并與傳統(tǒng)的PI控制器進(jìn)行深入比較分析。最后通過樣機(jī)實驗表明:兩種控制算法在控制MMC輸出電壓、電流,環(huán)流和電容電壓平衡控制等方面均具有很好的控制效果;盡管模型預(yù)測控制輸出電流波形質(zhì)量不如傳統(tǒng)PI控制器優(yōu)良,但是在電容電壓平衡方面表現(xiàn)出很大的優(yōu)勢;并且由于模型預(yù)測控制能知曉下一時刻的開關(guān)狀態(tài),并能預(yù)測最優(yōu)的開關(guān)組合狀態(tài),所以比傳統(tǒng)PI控制表現(xiàn)出更快的動態(tài)響應(yīng)特性。
模塊化多電平變換器;模型預(yù)測控制;傳統(tǒng)PI控制;死區(qū)控制;環(huán)流抑制;電容電壓均衡控制
0 引 言
模塊化多電平變換器(modular multilevel converter, MMC)是由德國西門子公司于2002年首先提出來的一種多電平變換器拓?fù)浣Y(jié)構(gòu)[1],與其他多電平變換器相比,MMC具有無可比擬的優(yōu)勢:模塊化設(shè)計易于擴(kuò)展到更高電壓等級,輸出波形畸變率低,電容電壓平衡易于控制,子模塊故障時可以實現(xiàn)容錯控制以及MMC提供一個公共直流母線,易實現(xiàn)背靠背連接等[2-3]。雖然MMC拓?fù)渑c其他多電平變換器相比具有很多優(yōu)勢,但是MMC在高電平輸出時,控制器不僅要實現(xiàn)多電平輸出,還要控制子模塊電容電壓均衡和抑制三相之間由于能量不均衡引起的相間環(huán)流,這些都是MMC亟需解決的問題。因此研究簡單有效的策略平衡電容電壓和抑制相間環(huán)流成為了國內(nèi)外學(xué)術(shù)界研究的熱點。
到目前為止,世界各國的專家學(xué)者已提出來很多基于PI控制器的MMC內(nèi)、外特性控制算法[4-9]。其中文獻(xiàn)[4-5]推導(dǎo)了d-q旋轉(zhuǎn)坐標(biāo)系下MMC開關(guān)周期平均模型,并在此基礎(chǔ)上設(shè)計了d-q電流解耦控制系統(tǒng);文獻(xiàn)[6]根據(jù)d-q旋轉(zhuǎn)坐標(biāo)系下的MMC小信號模型,得到MMC開環(huán)傳遞函數(shù)和動態(tài)時間常數(shù);為了抑制內(nèi)部環(huán)流,文獻(xiàn)[7-8]首先將三相環(huán)流經(jīng)abc/dq坐標(biāo)變換,然后d軸和q軸分別通過兩個PI控制器來抑制內(nèi)部環(huán)流;文獻(xiàn)[9]對電容電壓控制采用了電壓平衡控制和電壓平均控制。
模型預(yù)測控制具有快速的動態(tài)響應(yīng)能力,靈活性以及易于數(shù)字實現(xiàn)等特點,通過選擇合理的價值函數(shù),使用單一的控制器就能實現(xiàn)對MMC輸出電流、子模塊電容電壓和相間環(huán)流的有效控制。文獻(xiàn)[10]針對傳統(tǒng)的預(yù)測模型控制計算量龐大的缺點,深入分析MMC工作原理,提出了一種提高計算速度的優(yōu)化方法。文獻(xiàn)[11]針對MMC-STATCOM補(bǔ)償不平衡負(fù)載的情況,提出了采用雙同步坐標(biāo)變換解耦的方法模型預(yù)測控制算法。文獻(xiàn)[12]將模型預(yù)測控制成功應(yīng)用到MMC-HVDC系統(tǒng)中,具有良好的動態(tài)響應(yīng)特性。
盡管已有很多文獻(xiàn)采用傳統(tǒng)PI控制算法和模型預(yù)測控制算法對MMC進(jìn)行了系統(tǒng)的研究,但是鮮有文獻(xiàn)對傳統(tǒng)PI控制與模型預(yù)測控制算法的優(yōu)缺點進(jìn)行比較分析。考慮到文獻(xiàn)[9]中的PI控制算法既可以應(yīng)用于單相MMC系統(tǒng),又可以應(yīng)用于三相MMC系統(tǒng),所以本文采用該控制算法與模型預(yù)測控制算法相比較分析。并在模型預(yù)測控制中加入了死區(qū)控制,最后通過搭建實驗平臺,比較分析兩種控制算法的優(yōu)缺點。
1 MMC拓?fù)浣Y(jié)構(gòu)及數(shù)學(xué)模型
如圖1所示為MMC的拓?fù)浣Y(jié)構(gòu)圖,MMC由三相6橋臂組成,每相上、下橋臂各包含N個子模塊(sub-module, SM)和一個電抗器Ls串聯(lián)構(gòu)成,三相之間以及6個橋臂之間完全對稱,全部電氣參數(shù)的取值均相同。其中,橋臂電抗器Ls起到降低橋臂電流諧波畸變率和抑制相間環(huán)流的作用,同時在MMC發(fā)生嚴(yán)重的交、直流故障情況下抑制故障電流的上升速率,以保護(hù)MMC設(shè)備的安全運行。如圖1左上角所示為子模塊的拓?fù)浣Y(jié)構(gòu),子模塊主要由一個半橋與直流電容并聯(lián)組成。每個子模塊可以看成是一個二端口元件,通過控制功率管的導(dǎo)通和關(guān)斷,子模塊可以輸出+Uc或者0。如表1所示為子模塊的四種工作模式,其中“1”表示IGBT導(dǎo)通,“0”表示IGBT關(guān)斷。與傳統(tǒng)的兩電平拓?fù)浣Y(jié)構(gòu)不同,MMC在直流側(cè)正負(fù)極之間可不接直流儲能電容,依靠任意時刻每相上、下橋臂投入恒定數(shù)目的子模塊實現(xiàn)電壓支撐;在正常情況下,MMC直流側(cè)正、負(fù)極電壓分別為+Udc/2、-Udc/2。
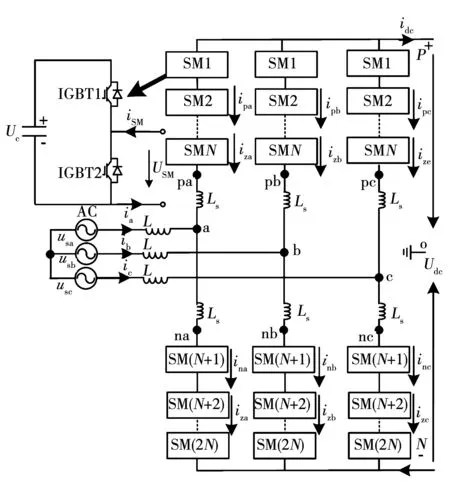
圖1 MMC及其子模塊拓?fù)浣Y(jié)構(gòu)Fig.1 Topology structure of MMC and its sub-model

模式IGBT1IGBT2iSMUSM狀態(tài)110>0Uc210<0Uc投入301>00401<00切除500>0,或<00閉鎖
由基爾霍夫電壓定律可以得到x相上、下橋臂電壓為
(1)
定義第x相環(huán)流為

(2)
則x相上、下橋臂電流滿足:
(3)
將式(1)中兩式相減再除以2,結(jié)合式(3)整理得

(4)
為了描述的方便,引入了輸出電壓ux和等效阻抗Leq為
(5)
那么式(4)可以化簡為

(6)
因為MMC相單元和上、下均具有嚴(yán)格的對稱性,所以直流電流Idc在三相中均分,MMC的三相交流電流被上、下橋臂均分,所以MMC的相間環(huán)流主要包括兩部分:直流部分和交流部分,直流部分主要起到功率傳輸?shù)淖饔茫涣鞑糠种饕?、4、6等偶數(shù)次諧波[13]。交流環(huán)流主要由于MMC三相上、下橋臂同時投入的子模塊數(shù)目不一致和子模塊電容電壓不平衡引起的。如果各相所投入的子模塊數(shù)目低于直流側(cè)電壓Udc,則產(chǎn)生正的環(huán)流成分補(bǔ)償電壓差異;相反各相上下橋臂所投入的子模塊電容電壓之和大于直流側(cè)電壓Udc,則產(chǎn)生負(fù)的環(huán)流成分。環(huán)流的具體表達(dá)式為
(7)
進(jìn)一步可得上、下橋臂電抗器上的電壓降為
(8)
結(jié)合式(2)、式(7)和式(8)可得
(9)
根據(jù)公式(6)和式(9)可以控制橋臂電感上的電壓降(upcirx+uncirx)來抑制環(huán)流從而不會對輸出電壓和輸出電流產(chǎn)生影響。
為了使MMC獲得更好的穩(wěn)態(tài)運行特性,MMC的內(nèi)部動態(tài)參數(shù)比如子模塊電容電壓平衡和環(huán)流必須得到很好的控制。本文引入兩種控制策略:模型預(yù)測控制與傳統(tǒng)PI控制。同時為了研究MMC的外部動態(tài)特性,兩種控制策略中均加入了輸出電流控制。
2 模型預(yù)測控制
2.1模型預(yù)測控制基本原理
模型預(yù)測控制的主要思想是:在每個采樣時刻,根據(jù)系統(tǒng)模型和MMC輸出電壓或電流的微分方程,使用模型預(yù)測控制預(yù)測出下一個采樣時刻相應(yīng)的電壓或者電流值,然后通過與參考值進(jìn)行比較,建立目標(biāo)函數(shù)選擇輸出誤差最小的開關(guān)組合狀態(tài),如圖2所示為模型預(yù)測控制框圖。

圖2 模型預(yù)測控制流程框圖Fig.2 Flow block diagram of model predictive control
模型預(yù)測控制主要分為以下三個步驟來實現(xiàn):
1)根據(jù)MMC的數(shù)學(xué)模型,推導(dǎo)出其離散時間模型的表達(dá)式。
2)根據(jù)控制目標(biāo)確定目標(biāo)函數(shù),模型預(yù)測控制包括三個控制目標(biāo):MMC交流側(cè)輸出電流控制,目的是控制MMC交流側(cè)輸出電流能夠跟蹤電流參考值;子模塊電容電壓均衡控制,目的是控制子模塊電容電壓能夠穩(wěn)定工作在其額定值附近;環(huán)流抑制,目的是抑制橋臂的環(huán)流交流分量,降低橋臂電流的畸變度。
3)在每個控制周期計算所有可能出現(xiàn)的投切組合下目標(biāo)函數(shù)的值,選擇使目標(biāo)函數(shù)值最小的投切組合生成開關(guān)信號。
根據(jù)文獻(xiàn)[14]的分析可得包含MMC交流側(cè)輸出電流、子模塊電容電壓和環(huán)流的目標(biāo)函數(shù)為
λ4ns(k+1)。
(10)
其中,“*”表示參考值,λi(i=1,2,3,4)表示各控制目標(biāo)的權(quán)重系數(shù),權(quán)重系數(shù)的取值方法可以參考文獻(xiàn)[15]。ns表示為了得到新的開關(guān)組合狀態(tài)在采樣周期k和采樣周期k+1之間需要計算的開關(guān)組合數(shù)量。ns的計算表達(dá)式為

(11)
其中,g1,g2...g(2N)∈(0,1)表示各子模塊的開關(guān)狀態(tài)(當(dāng)子模塊處于1,2模式時,gi=1,當(dāng)子模塊處于3,4模式時,gi=0)。公式(11)的系數(shù)2是因為考慮到一個子模塊中的兩個IGBT的開關(guān)狀態(tài)。
2.2建立系統(tǒng)數(shù)學(xué)模型
數(shù)學(xué)模型的建立對模型預(yù)測控制的執(zhí)行具有關(guān)鍵性作用,模型的準(zhǔn)確性直接影響著控制誤差。仿真計算速度也主要依賴于所建模型的復(fù)雜程度。

(12)
由基爾霍夫電壓定律可得如下方程式成立:

(13)
式(1)又可改寫為

(14)
從式(13)和式(14)可知橋臂電抗Ls的電壓降必須考慮在內(nèi),聯(lián)合式(10)、式(13)和式(14)可得到如下狀態(tài)矢量方程式成立:

(15)
式中,upx和unx是各橋臂所串聯(lián)的子模塊的開關(guān)函數(shù),表示如下:
(16)
(17)
子模塊的電容電壓滿足如下方程式:
(18)
為了提高計算速度,減少計算時間,采用了前置歐拉算法:

(19)
其中采樣時間為Ts;由于橋臂電流改變的比較迅速,所以必須采用比較短的步長來預(yù)測電容電壓,因此,方程式(19)被離散為如下方程式:
(20)
2.3死區(qū)補(bǔ)償策略
子模塊中的實際IGBT器件具有非理想開關(guān)特性,即具有開通和關(guān)斷時間,且開通時間往往小于關(guān)斷時間,為了避免橋臂直通,必須在同一子模塊上下兩個IGBT驅(qū)動信號之間設(shè)定“先斷后通”的PWM開關(guān)死區(qū)。相對于開關(guān)周期來說,死區(qū)時間盡管很短,但是由于各橋臂級聯(lián)的子模塊較多,累計效應(yīng)嚴(yán)重,MMC輸出電壓出現(xiàn)誤差,進(jìn)而導(dǎo)致MMC輸出電流發(fā)生畸變。因此有必要對死區(qū)效應(yīng)引起的電壓損失進(jìn)行有效補(bǔ)償。
以圖1中的某一子模塊為例闡述死區(qū)補(bǔ)償策略。當(dāng)iSM>0時,若IGBT1驅(qū)動信號S1=1,IGBT2驅(qū)動信號S2=0,則IGBT1導(dǎo)通,IGBT2關(guān)斷,則該子模塊輸出電壓USM=Uc;當(dāng)S1突變?yōu)?時,IGBT1關(guān)斷,由D2續(xù)流,USM=0,此時即使S2=1,IGBT2依然不能導(dǎo)通,由此可見,當(dāng)iSM>0時,子模塊的輸出電壓USM僅有S1決定。同理,iSM<0時,USM僅有S2決定。
根據(jù)上述分析,當(dāng)iSM>0時,保持S1不變,S2提前td關(guān)斷并延遲td導(dǎo)通;當(dāng)iSM<0時,保持S2不變,S1延遲td導(dǎo)通并提前td截止,即可使逆變器實際輸出電壓與理想輸出電壓一致。
引入死區(qū)補(bǔ)償后的子模塊上、下IGBT開關(guān)過程波形如圖3所示。其中圖3(a)為上下IGBT的理想驅(qū)動信號;圖3(b)和圖3(c)分別為iSM>0和iSM<0時的死區(qū)補(bǔ)償原理;圖3(d)為子模塊理想輸出電壓USM波形圖;圖3(e)為采用本文提出的死區(qū)補(bǔ)償方法后子模塊實際輸出電壓波形,其中包括iSM>0和iSM<0兩種情況。根據(jù)圖3可知,將提出的死區(qū)補(bǔ)償策略加入模型預(yù)測控制中(如圖2),可使子模塊實際輸出電壓與理想輸出電壓一致,從而避免了死區(qū)效應(yīng)給輸出電壓帶來的影響。
3 傳統(tǒng)PI控制算法
文獻(xiàn)[9]中的MMC控制策略主要包括電容電壓均衡控制和相間環(huán)流抑制模塊,為了與模型預(yù)測控制算法相比較分析,文中還加入了MMC輸出電流控制。這里傳統(tǒng)PI控制方法分為三部分。
3.1外部輸出電流控制

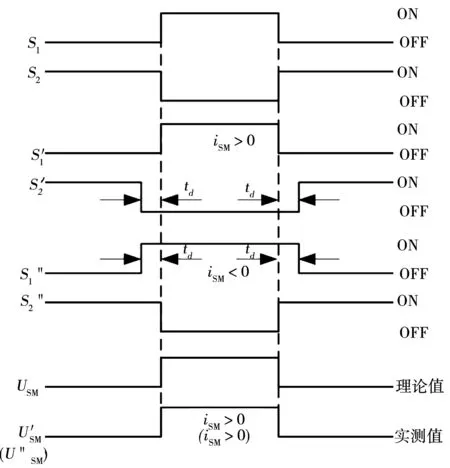
圖3 死區(qū)補(bǔ)償策略原理圖Fig.3 Schematic diagram of dead-time compensation
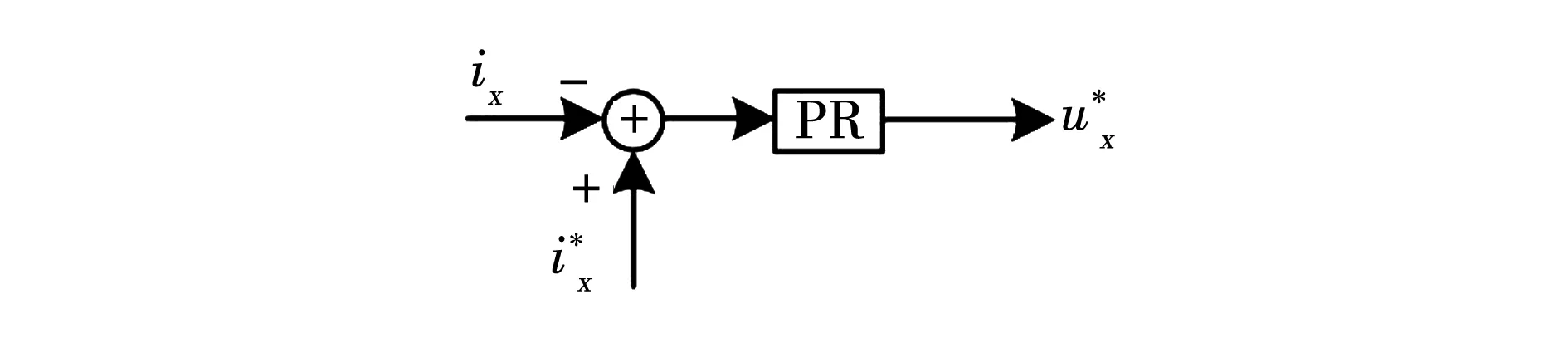
圖4 輸出電流控制框圖Fig.4 Control diagram of output current
3.2能量均分控制
能量均分控制就是使各子模塊電容電壓的平均值跟蹤它的參考值,從而控制MMC相間環(huán)流的大小使能量均勻的分配到各子模塊中。如圖5為能量均分控制的控制框圖。
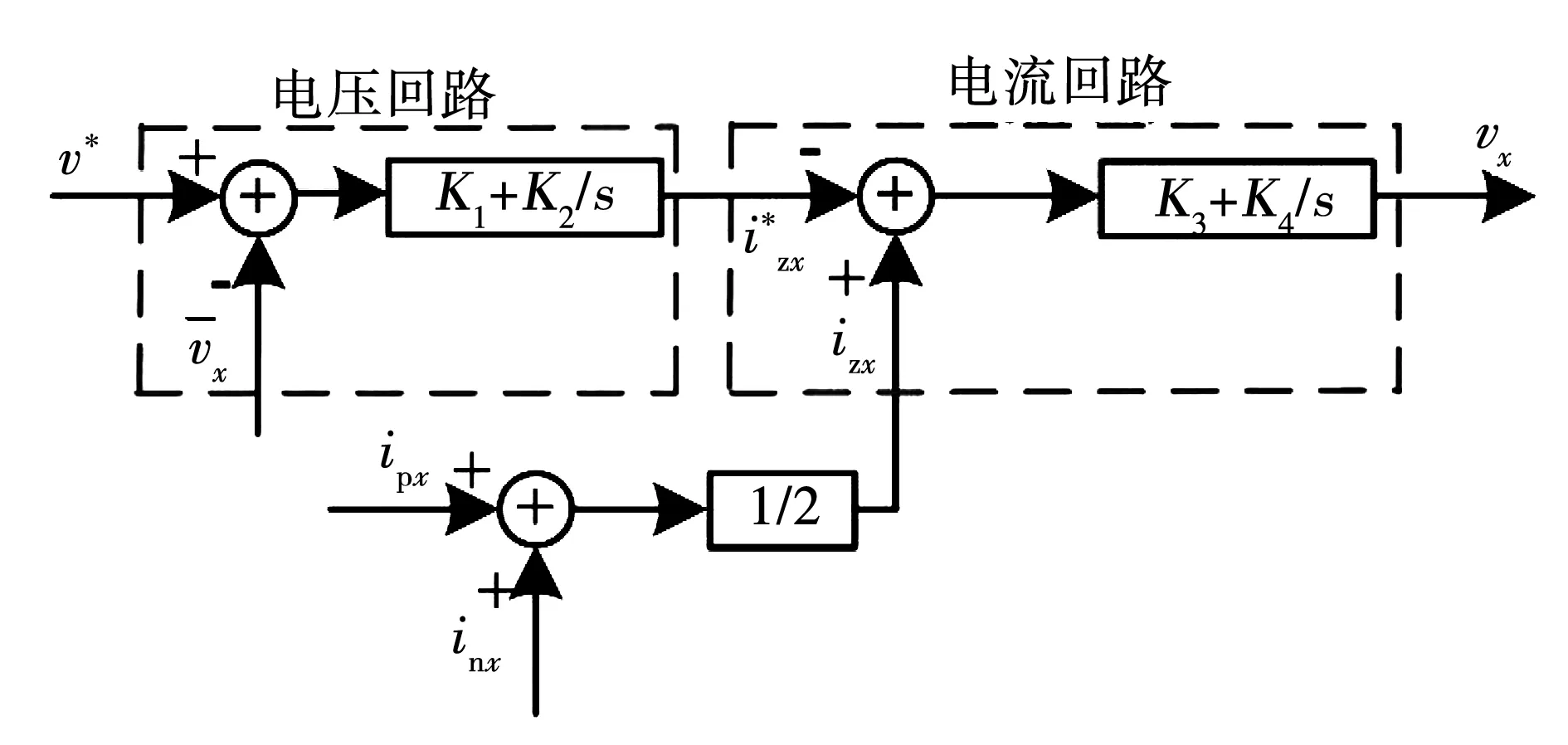
圖5 能量均分控制框圖Fig.5 Equipartition of energy control diagram

(21)
平均控制得到的電壓調(diào)制參考值為

(22)

3.3電容電壓均衡控制
電容電壓均衡控制的目的就是使MMC各子模塊電容電壓跟蹤其參考值,其控制框圖如圖6所示。對于x相上、下橋臂子模塊的電壓控制修正量為如下表達(dá)式:
(23)
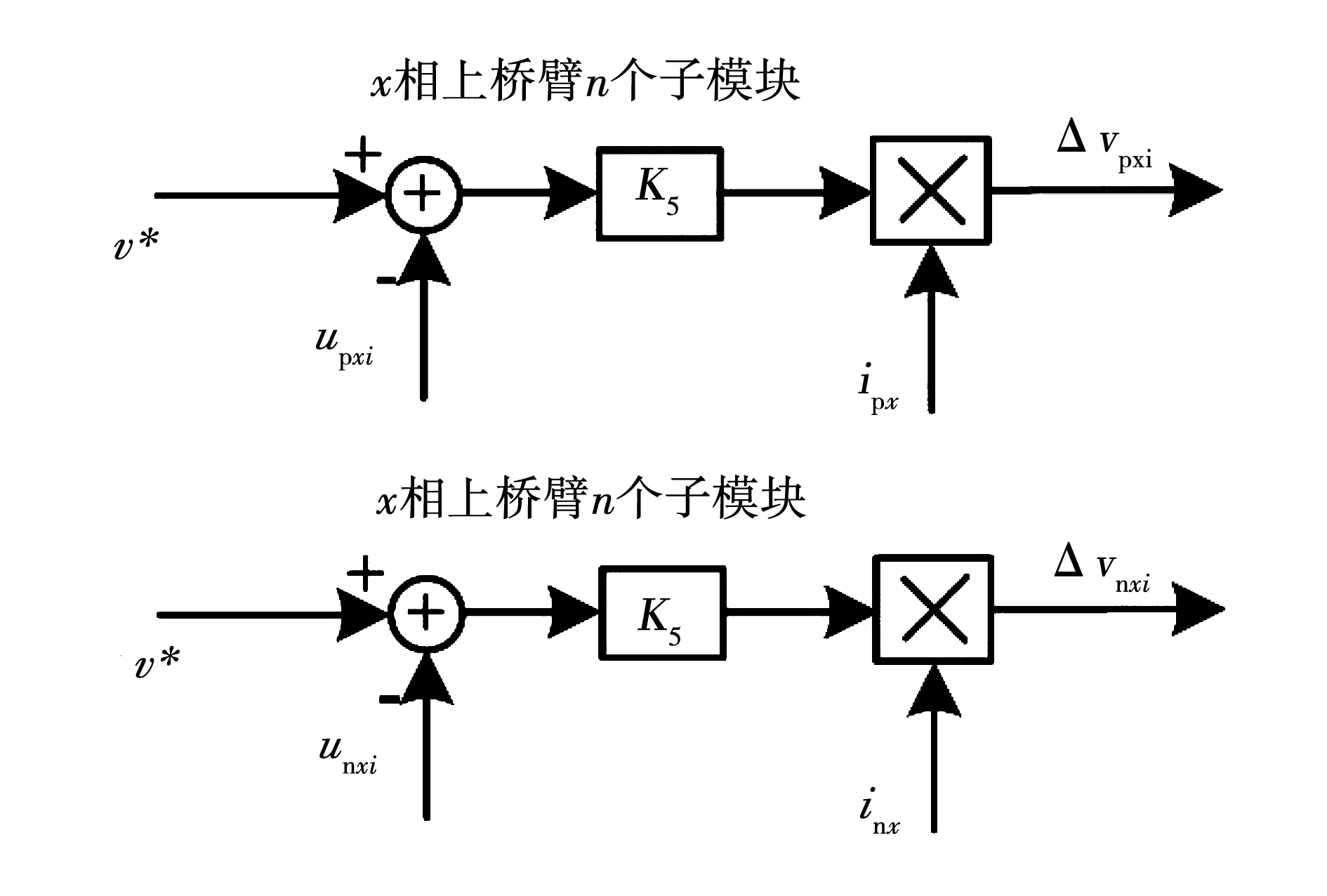
圖6 電容電壓均衡控制框圖Fig.6 Capacitor-voltages balancing control diagram
(24)
由于上、下橋臂中各含有N個子模塊,且上、下橋臂中每個子模塊的調(diào)制波表達(dá)式可以表示為
(25)
然后用得到的調(diào)制信號分別于相應(yīng)的三角波比較得到需要的PWM控制信號,從而驅(qū)動IGBT的導(dǎo)通或關(guān)斷。
4 實驗驗證與分析
為了研究MMC模型預(yù)測控制與傳統(tǒng)PI控制策略的動態(tài)特性,特搭建了如圖7所示的實驗樣機(jī),由于受到實驗室硬件條件和經(jīng)費的限制,只搭建了各橋臂級聯(lián)兩個(N=2)子模塊的三相MMC系統(tǒng)。直流側(cè)母線電壓為200V,也就是每個子模塊電容電壓維持在100V,所接負(fù)載為阻感負(fù)載;橋臂所串的電感值為2mH,每個子模塊電容值為3 300μF。開關(guān)頻率為1kHz。由于MMC模型預(yù)測控制計算復(fù)雜,為了減小計算負(fù)擔(dān),提高計算速度,本實驗只采用單相MMC系統(tǒng)來比較分析兩種控制策略的優(yōu)缺點。其他兩相主要為單相MMC系統(tǒng)提供恒定的直流側(cè)母線電壓。

圖7 實驗樣機(jī)圖Fig.7 Experimental prototype photo
4.1穩(wěn)態(tài)特性比較分析

從圖8(a)和9(a)輸出電壓實驗波形可知,采用兩種控制算法的MMC輸出電壓均為五電平;但是傳統(tǒng)控制算法的輸出電壓脈沖比較規(guī)則,而模型預(yù)測控制算法的輸出電壓脈沖呈現(xiàn)不規(guī)則狀態(tài),其原因是由于模型預(yù)測控制采樣時間不合適導(dǎo)致某些開關(guān)組合狀態(tài)被遺漏。

圖8 模型預(yù)測控制穩(wěn)態(tài)實驗波形Fig.8 Steady experimental waveforms by model predictive control
兩種控制算法都可以很好的抑制內(nèi)部環(huán)流,且具有很好的穩(wěn)態(tài)特性。盡管模型預(yù)測控制的環(huán)流在某些時間段不規(guī)則,但是環(huán)流的平均幅值比采用傳統(tǒng)PI控制要小,抑制環(huán)流效果更明顯,如圖8(c)和圖9(c)。
盡管兩種算法均可使子模塊電容電壓處于均衡狀態(tài),但是控制效果卻有顯著差異。從圖8(d)和圖9(d)中可以看出,子模塊電容電壓中均包含高次諧波,但是模型預(yù)測控制的效果要比傳統(tǒng)PI控制的效果好。不僅各橋臂的子模塊電容電壓處于均衡狀態(tài),而且同一相上、下橋臂的子模塊平均電容電壓也處于同一平衡狀態(tài);然而,傳統(tǒng)PI控制的上、下橋臂的平均電容電壓存在明顯差異,這主要是因為控制器采樣周期較長,增加了死區(qū)時間導(dǎo)致遺失某些開關(guān)狀態(tài);增加采樣頻率可以有效的解決上述問題。而模型預(yù)測控制由于增加了死區(qū)時間補(bǔ)償,所以電容電壓均衡效果較好。
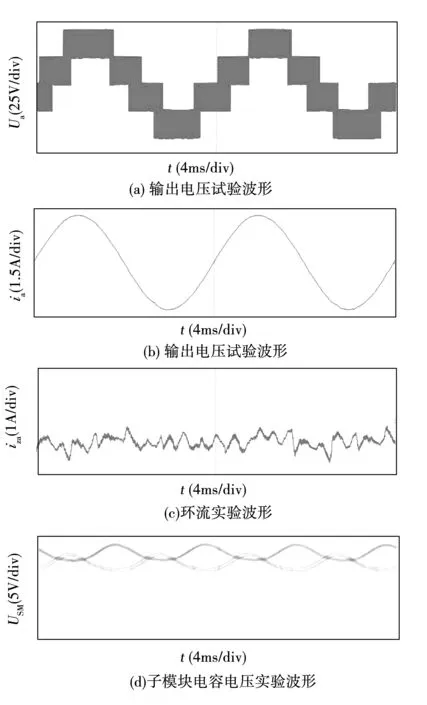
圖9 傳統(tǒng)PI控制穩(wěn)態(tài)實驗波形Fig.9 Steady experimental waveforms by traditional PI controller
4.2動態(tài)特性比較分析
當(dāng)單相MMC系統(tǒng)處于穩(wěn)態(tài)運行時輸出電流參考值在1s時刻由5A突變?yōu)?A,得到的動態(tài)實驗波形如圖10、圖11所示。根據(jù)圖10可知采用模型預(yù)測控制時內(nèi)部環(huán)流沒有出現(xiàn)振蕩,所以MMC系統(tǒng)表現(xiàn)出很好的穩(wěn)定性。在1s時刻,輸出電流ix經(jīng)陡坡無超調(diào)地迅速跟蹤參考值,所以具有很高的動態(tài)響應(yīng)特性。然而如圖11所示采用傳統(tǒng)PI控制的動態(tài)響應(yīng)相對較差,且出現(xiàn)了超調(diào)震蕩,這同樣是由于采樣周期較長,死區(qū)時間的存在導(dǎo)致遺失了某些開關(guān)組合狀態(tài)和參考值離散化不精確。模型預(yù)測控制補(bǔ)償了死區(qū)時間,精確的預(yù)測可以減小超調(diào),所以模型預(yù)測控制的動態(tài)特性要優(yōu)于傳統(tǒng)PI控制算法,這是模型預(yù)測控制的一個顯著優(yōu)點。

圖10 模型預(yù)測控制動態(tài)實驗波形Fig.10 Dynamic experimental waveforms by model predictive control
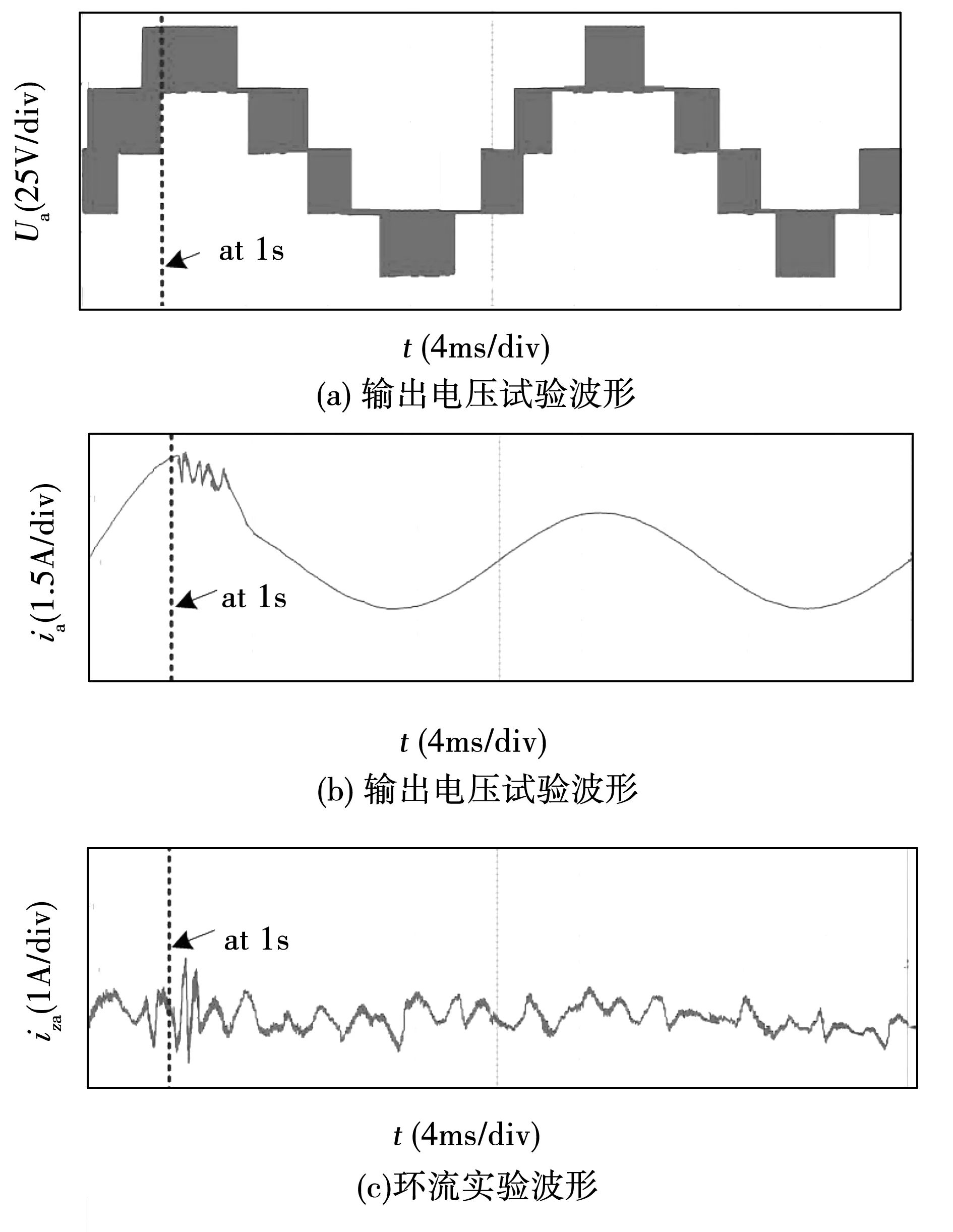
圖11 傳統(tǒng)PI控制動態(tài)實驗波形Fig.11 Dynamic experimental waveforms by traditional PI controller
5 結(jié) 論
為了更好地控制MMC的內(nèi)、外動態(tài)特性,本文研究了兩種主流的MMC控制策略:模型預(yù)測控制和傳統(tǒng)PI控制。首先深入分析了MMC的數(shù)學(xué)模型,然后研究分析模型預(yù)測控制與傳統(tǒng)PI控制策略的工作原理,為了減小輸出電流畸變,并在模型預(yù)測控制中引入了死區(qū)補(bǔ)償。最后通過樣機(jī)實驗表明:模型預(yù)測控制結(jié)構(gòu)簡單所以具有很好的穩(wěn)態(tài)特性;由于模型預(yù)測控制能知曉下一時刻的開關(guān)狀態(tài),并能預(yù)測最優(yōu)的開關(guān)組合狀態(tài),所以比傳統(tǒng)PI控制表現(xiàn)出更快的動態(tài)響應(yīng)特性。但是模型預(yù)測控制的一個顯著缺點是計算復(fù)雜,計算時間隨子模塊的數(shù)目呈指數(shù)增長。在控制性能與計算速度之間需要做一個妥協(xié),模型預(yù)測控制不適合級聯(lián)子模塊多的MMC系統(tǒng)。
[1]LESNICAR A, MARQUARDT R.An innovative modular multilevel converter topology suitable for a wide power range[C]//IEEE Bologna Power Tech Conference.Bologna Italy.2003:545-546.
[2]湯廣福,賀之淵,滕樂天,等.電壓源換流器高壓直流輸電技術(shù)最新研究進(jìn)展[J].電網(wǎng)技術(shù),2008,32(22):39-45.
TANG Guangfu,HE Zhiyuan,TENG Letian,et al.New progress on HVDC technology based on voltage source converter[J].Power System Technology,2008,32(22):39-45.
[3]管敏淵,徐政.向無源網(wǎng)絡(luò)供電的MMC型直流輸電系統(tǒng)建模與控制[J].電工技術(shù)學(xué)報,2013,28(2):255-264.
GUAN Minyuan,XU Zheng.Modeling and control of modular multilevel based VSC-HVDC system connected to passive networks[J].Transactions of China Electrotechnical Society,2013,28(2):255-264.
[4]趙巖,胡學(xué)浩,湯廣福,等.含模塊化多電平換流器的分布式發(fā)電系統(tǒng)動態(tài)特性分析[J].電網(wǎng)技術(shù),2011,35(7):42-47.
ZHAO Yan,HU Xuehao,TANG Guangfu,et al.Dynamic characteristics analysis of distributed generation system based on modular multilevel converters[J].Power System Technology,2011,35(7):42-47.
[5]ZHAO Y,HU X H,TANG G F,et al.A study on MMC model and its current control strategies[C]//IEEE International Symposium on Power Electronics for Distributed Generation Systems.Hefei,China:IEEE,2010:259-264.
[6]劉棟,湯廣福,鄭健超,等.模塊化多電平換流器小信號模型及開環(huán)響應(yīng)時間常數(shù)分析[J].中國電機(jī)工程學(xué)報,2012,32(24):1-7.
LIU Dong,TANG Guang,ZHENG Jianchao,et al.Small signal modeling and anaIysis of open-loop response time constant of MMC[J]. Proceedings of the CSEE,2012,32(24):1-8.
[7]Q. Tu, Z. Xu,J. Zhang.Circulating current suppressing controller in modular multilevel converter[C]//IEEE IECON 2010 36th Annual Conference on IEEE Industrial Electronics Society Glendale,USA.2010:3198-3202.
[8]G. BERGNA, E. BERNE, P. EGROT, P. Lefranc,et al. An energy-based controller for HVDC modular multilevel converter in decoupled double synchronous reference frame for voltage oscillation reduction[J]. IEEE Transactions on Industrial Electronics, 2013, 60(6): 2360-2371.
[9]M. HAGIWARA, H. AKAGI. Control and experiment of pulsewidth- modulated modular multilevel converters[J]. IEEE Transactions on Power Electronics,2009,24(7):1737-1746.
[10]CAO Mu, WANG Yue, CONG Wulong, et al.An optimization method of model preditive control for MMC[C]// The 20th Conference of China Power Supply Society,Hangzhou, 2013:301-306.
[11]CAO Mu, WANG Yue, LIU Pu, et al. Model predictive control of modular multilevel converter-based STATCOMs[C]//The 16th Conference of national electrical automation and electric control system of academic,Chengdu, 2013:52-56.
[12]Jiangchao Qin, Maryam Saeedifard. Predictive control of a modular multilevel converter for a back-to-back HVDC system[J]. IEEE Transactions on Power Delivery,2012,27(3):1538-1547.
[13]She X,Huang A,Ni X,et al.AC circulating currents suppression in modular multilevel converter[J]. IECON 2012-38th Annual Conference of IEEE Industrial Electronics,Montreal,QC,Canada,2012:190-194.
[14]Marcelo A. Perez, Jose Rodriguez, Esteban J. Fuentes. Predictive Control of AC-AC Modular Multilevel Converters[J]. IEEE Transactions on Industrial Electronics, 2012,59(7):2832-2839.
[15]P. CORTES, S. KOURO, B. LA ROCCA,et al. Guidelines for weighting factors design in model predictive control of power converters and drives[C]//ICIT2009,IEEE International Conference on Industrial Technology,Gippsland,VIC.2009:1-7.
(編輯:劉素菊)
Research on comparative analysis of MMC control strategies
LI Wei,LI Geng-yin
(State Key Laboratory of Alternate Electrical Power System With Renewable Energy Sources,North China Electric Power University,Beijing 102206, China)
Aiming at study the MMC control strategies, model predictive control was applied to MMC system. In order to achieve the better control results, dead-time compensation was introduced in model predictive control, and it made an in-depth analysis compared with the traditional PI controller. Finally, the prototype test results indicate that both control strategies can obtain good results on controlling MMC output voltages, currents, sub-model capacitor voltages and suppressing circulating currents. Although the output currents by model preditive control are not as good as that by traditional PI controller, the model preditive control has a great advantage on capacitor-voltages balancing. Besides, the dynamic performance of model preditive control is even superior to the considered PI control, due to the prediction of the future converter behavior.
modular multilevel converter; model preditive control; traditonal PI controller; dead-time compensation; circulating current suppressing; capacitor-voltage balancing control
2014-11-26
國家自然科學(xué)基金(51190103/E0704)
李威(1987—),男,博士研究生,研究方向為多電平變換技術(shù)、柔性直流輸電技術(shù)、新能源并網(wǎng)發(fā)電等;
李庚銀(1964—),男,博士,教授,博士生導(dǎo)師,研究方向為新能源發(fā)電、電力系統(tǒng)分析與控制、柔性輸配電技術(shù),電能質(zhì)量等。
李威
10.15938/j.emc.2016.08.008
TM 72
A
1007-449X(2016)08-0055-09
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19