基于STM32的微位移檢測系統設計*
2016-08-22 12:11:21王選擇翟中生楊練根劉文超
傳感器與微系統 2016年7期
王選擇, 侯 浩, 翟中生, 楊練根, 劉文超
(1.湖北工業大學 機械工程學院,湖北 武漢 430068;2.湖北省現代制造質量工程重點實驗室,湖北 武漢 430068)
基于STM32的微位移檢測系統設計*
王選擇1,2, 侯 浩1, 翟中生1,2, 楊練根1,2, 劉文超1,2
(1.湖北工業大學 機械工程學院,湖北 武漢 430068;2.湖北省現代制造質量工程重點實驗室,湖北 武漢 430068)
研制了一種基于STM32的微位移檢測系統設計方案。通過抑制直流漂移的電路處理模塊得到直流穩定的兩路光電信號。根據兩路光電信號的相位特點,采用STM32同步采樣兩路光電信號,并利用橢圓擬合、最小二乘法、相位解包裹法對采集的數據進行處理運算,計算出微位移。現場測試結果表明:該系統滿足微位移測量要求。
干涉; 微位移; 直流漂移; STM32; 橢圓擬合; 最小二乘法; 相位解包裹法
0 引 言
激光干涉法測量精度高,速度快,適合于微振動的測量[1]。其信號處理方式一般為干涉條紋的計數細分辨向處理方法,但前提條件是保證干涉信號具有較小的直流漂移。然而,在實際處理過程中,由于背景光強的影響,直接應用的光電轉換干涉信號容易發生直流漂移,對測量結果影響很大。因此,直流漂移的抑制對干涉的測量顯得尤為重要。
四象限光電接收與差分處理[2],是一種目前抑制直流漂移的常規方法。它主要是通過光電信號的兩兩相減來消除直流漂移的影響。這種方法能夠很好地消除背景光強的影響,但無法消除由于激光本身光斑不均勻或光強分布發生改變的條件引起的直流漂移。
為此,本文提出了一種基于STM32的微位移檢測系統設計方案。首先,設計出一種微振動干涉測量中抑制直流漂移的簡潔的處理電路。它只需要通過二個光電象限完成干涉條紋的接收處理。主要思想是利用積分加一階濾波形成反饋環,保證最終輸出信號的直流偏置停留在設置的電壓上,達到抑制直流漂移的目的。為了計算兩路光電信號的幅值與相位,需要同步采樣兩路光電信號,且要求1s內連續采樣4 000個數據,需要較大的SRAM,故采用高性能、低功耗微處理器芯片STM32F103VCT6來進行數據采樣與運算。
1 激光干涉測微位移原理與系統設計
系統設計示意圖如圖1所示,利用顯微探測思想,激光經過光隔,防止反射光的回饋效應,影響干涉質量。再經過分光鏡,產生兩路光線,一路光經過遠心鏡頭1到達被測振動物體,然后反射回來到光電管;另一路光透過分光鏡,經過遠心鏡頭2到達參考鏡,反射回來到達光電管。兩路反射回來的光在光電管處產生運動的干涉條紋,光電管接收運動的干涉條紋后,形成有相位差的兩路光電流。經過處理電路后,轉換為兩個電壓信號,STM32同步采集這兩路電壓信號后,經過橢圓擬合與最小二乘法,計算出被測物體振動的微小位移。該方案利用遠心鏡頭,使激光方向不受被測偏轉角度變化而變化,產生較理想的干涉條紋。

圖1 系統設計示意圖Fig 1 Diagram of system design
2 處理電路模塊
2.1 電路原理與分析
電路原理如圖2所示,D1為一個光電象限;Vo為輸出信號;X1為電路反饋中自適應調整的參數。首先干涉條紋
的運動通過光/電流轉換,并采用三極管對光電流Ib進行放大。放大的光電流信號Ic分為直流I1與交流I2兩部分,其中,直流量由VCC-X通過電阻器R1提供,交流量由Vo-X1通過R2提供。從電路中可以看出,當直流光強變化時,在電路自反饋調整下,保證流過R1的電流就是光/電轉換放大后的直流成分,而Vo輸出僅為其交流成分,抵消了由于直流光強變化導致直流偏置變化的影響。
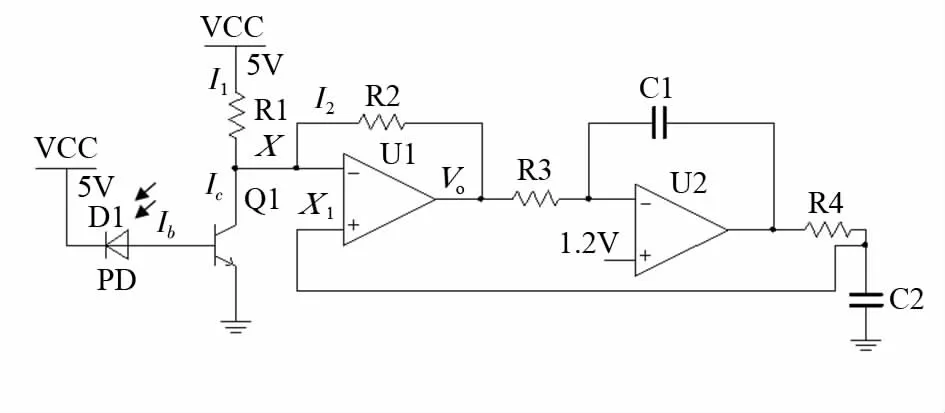
圖2 光電轉換反饋抑制電路Fig 2 Photoelectric converting circuit with feedback restrain
2.2 電路理論輸出信號和模型方塊圖與仿真
Vo(s)=
(1)
式中 Ib(s)為輸入,Vo(s)為輸出。
電路的系統方塊圖如圖3所示。

圖3 系統方塊圖Fig 3 Block diagram of system
輸入信號Ib(s)由三部分組成:10BZ微振動的光電信號直流成分與交流成分、0.1BZ的外界波動光強的光電信號,Vo(s)為輸出信號。
選取參數k=140,R1=500Ω,R2=1kΩ,R3=1MΩ,R4=100kΩ,C1=1μF,C2=1μF時,則k2=2,τ1=1,τ2=0.1。輸出為

(2)
當模擬外界光強變化時,即輸入Ib(s)變化時,系統模型仿真如圖4所示,圖中所示輸入信號Ib(s)被放大了k1=140 000倍。

圖4 輸入Ib(s)變化時仿真結果Fig 4 Simulation result for Ib(s) decreasing
從圖4(a)可以看出:0.5s時刻,外界光強階躍變大,直接影響輸入光電流Ib(s)的變大,間接導致輸出Vo(s)變大,在電路自反饋調整下,輸出Vo(s)的直流偏置被調整在設定的1.2V。由圖3還可以看出:在0.1BZ的外界波動光強的影響下,1.5s時刻輸入Ib(s)在減小,在電路自反饋調整下,調整輸出Vo(s)的直流偏置。可以看出,在電路自反饋調整下,0.1BZ的外界波動光強對輸出Vo(s)的影響很小。實際情況下,外界波動光強的頻率更低,對輸出Vo(s)的影響幾乎不可見。
同理,從圖4(b)可以看出:在外界光強階躍變小和0.1BZ的外界波動光強的影響下,通過電路自反饋調整,輸出Vo(s)的直流偏置被調整在設定的1.2V,抵消了由于直流光強的變化導致直流偏置變化的影響。
從仿真結果可知,反饋處理電路在理論上能夠抑制輸出 的直流漂移。
3 信號采集模塊
本系統采用STM32F103F103VCT6單片機來進行數據采集與運算。該單片機片上集成了256kBFlash和48kBSRAM,足以存儲設計的程序和同步采集得到的數據。另外,該單片機擁有3個12位逐次逼近型的A/D轉換器[3],共18個通道,包括16個外部和2個內部信號源的測量,可實現本系統中兩路信號的同步采集。基于這些特點,可以使本系統設計的更為小巧,集成度高。
系統使用STM32的定時器產生4kBZ的PWM來連續觸發ADC1與ADC2的同步規則采樣,并使用DMA傳輸采樣的數據,無需CPU直接控制傳輸,使CPU的效率大為提高,有更多的時間對數據進行運算處理。最后,通過一系列算法計算出被測物體的振動位移。
為了驗證推導的理論式(2)與仿真的結果圖4,實驗條件下采集輸出信號數據,通過人為改變背景光強,即一種階躍背景光強的條件下,呈現了信號的變化過程,采樣結果如圖5所示。可以看出,背景光強變化時,輸出信號也會跟著變化,但在電路的自反饋調整下,輸出信號的直流偏置會很快調整在1.2V。實驗結果表明,背景光強變化時,該電路都能夠實時反饋抑制輸出信號的直流漂移,克服了背景光強的影響,提高了測量系統的穩定性。實際情況下,背景光強緩慢變化,不會出現這樣調整大幅的電壓變化現象,滿足測量的要求。

圖5 光強階躍變化時信號調整過程Fig 5 Signal adjustment process while light intensity step change
4 數據處理
處理電路輸出電壓信號可以寫成
(3)
式中 x,y為兩路電壓信號;A,B分別為兩路信號的幅值;s為被測振動物體的位移;λ為激光的波長;φ為兩路信號之間的相位差;C1,C2分別為兩路信號的直流偏置量。顯然,這兩路信號構成一個李薩如圓[4],為了得到干涉條紋盡量小的相移誤差,必須對李薩如圓進行橢圓擬合。橢圓坐標方程描述如下
y2+axy+bx2+cy+dx+e=0
(4)
應用STM32的兩路A/D轉換器同步采樣,得到的4 000個點坐標(xi,yi),基于最小二乘思想對橢圓擬合,求解橢圓擬合系數。進一步求解參數φ,C1,C2,A1,A2。然后,利用反正切函數atan2求取相位[5],即
(5)
當被測振動物體振動幅度超過λ/Z時,會導致反正切計算出來的相位θ如圖6(a)幅圖所示情況,為了得到真實的相位分布,需要對這些包裹相位作進一步的處理,將被截斷的相位連接起來,以得到真實的相位分布,這一處理過程稱為“相位解包”。相位解包裹結果如圖6(b)所示。

圖6 相位解包裹前后Fig 6 Before and after phase-unwrapping
5 實驗結果與分析
利用該系統對某個微振動裝置振動幅度進行測量。在實驗裝置驅動幅度與頻率不變的條件下,應用上面的方法進行位移數據的采集,并通過正弦擬合的方式獲取實驗振動位移的幅度。16.5h振動幅度測量數據10選1結果如圖7所示。

圖7 系統16.5 h內測量位移Fig 7 Displacement of system measured in 16.5 h
由長時間測量數據可以看出,被測物體振動幅度在1 460~1 468 nm之間變化,系統測量穩定性高。振動幅度大約為2.25個激光器的波長,檢測精度達到nm級測量水平。
6 結 論
本文提出了一種微位移測量系統設計方案。采用二象
限光電管接收運動的干涉條紋,消除了由于激光本身光斑不均勻或光強分布發生改變的條件引起的直流漂移。為了抑制外界光強變化時引起的直流漂移,設計出了一種簡潔的電路處理方法。采用STM32內置的2路A/D轉換器同步采樣兩路電壓信號,避免了外接高速ADC采樣電路。該系統結構簡單,體積小,低功耗,可采用電池供電,容易設計成便攜式測量儀器。信號處理采用橢圓擬合,提高了系統測量精度。該系統適用于大部分微振動測量領域。
[1] 傅繼武,談振興,徐旭明,等.一種利用激光干涉條紋位相進行微位移測量方法[J].南昌大學學報:理科版,2003,27(3):299-301.
[2] 王淑珍,謝鐵邦,常素萍.四象限光電探測器用于表面形貌測量的研究[J].中國機械工程,2008,19(19):2348-2351.
[3] 賈至江,孟令軍,高世明.基于STM32的無線傳感器網絡聲定位節點的設計與實現[J].傳感器與微系統,2010,29(11):107-109.
[4] 王選擇,趙新澤,謝鐵邦.電感式測微儀的直接數字化處理研究[J].儀器儀表學報,2005,26(12):1248-1252.
[5] Monroy-Ramirez F,Garcia-Sucerquia J.Monitoring micro-mechanical changes in electronic circuit boards with digital holographic interfe rometry[J].Optik,2014,125(9):2113-2116.
[6] Yang Tao,Yan Liping,Chen Benyong,et al.Signal processing method of phase correction for laser heterodyne interferome-try[J].Optics and Lasers in Engineering,2014,57:93-100.
Design of micro displacement detecting system based on STM32*
WANG Xuan-ze1,2, HOU Hao1, ZHAI Zhong-sheng1,2, YANG Lian-gen1,2, LIU Wen-chao1,2
(1.College of Mechanical Engineering,Hubei University of Technology,Wuhan 430068,China;2.Key Laboratory of Modern Manufacture Quality Engineering,Hubei University of Technology,Wuhan 430068,China)
A micro displacement detection system based on STM32 is researched and fabricated.The system uses circuit processing module for restraining DC drift to generate two paths photoelectric signals without DC drift.According to phase characteristics of two paths photoelectric signals,using STM32 synchronous sampling two paths photoelectric signals,using Ellipse fitting algorithm,the leastsquare fitting and phase-unwrapping algorithm to process the acquired datas and workout micro displacement.Field test results indicate that the system satisfies requirements of micro displacement measurement.
interference; micro displacement; DC drift; STM32; Ellipse fitting; least-square fitting; phase-unwrapping
10.13873/J.1000—9787(2016)07—0083—04
2015—10—19
國家自然科學基金資助項目(51175154,51275157);湖北省杰出青年人才基金資助項目(2010CDA088);湖北省教育廳中青年基金資助項目(Q20101405,Q20101407);湖北省科技廳基金資助項目(2010CDB03104)
TP 216
A
1000—9787(2016)07—0083—04
王選擇(1971-),男,湖北天門人,教授,博士生導師,主要從事精密測量、光電檢測方面的研究。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
