基于ADAMS方程式賽車懸架虛擬樣機設計
2016-08-20 08:09:34劉丹丹郭超
汽車工程師 2016年12期
劉丹丹 郭超
(運城職業技術學院)

方程式賽車懸架有其一定的標準及要求,普遍采用獨立懸架。基于方程式賽車結構特點,一般選用雙橫臂獨立懸架。因為其簧載質量小,橫臂的長短可以按要求設計,給賽車的設計提供了更大的自由空間,賽車在直線行駛和轉彎行駛,都能保證良好可靠的性能。文章通過ADAMS軟件對方程式賽車懸架進行優化。
1 賽車前懸架建模參數設置
根據標準推薦,初步確定方程式賽車前懸架結構尺寸,如圖1和圖2所示。
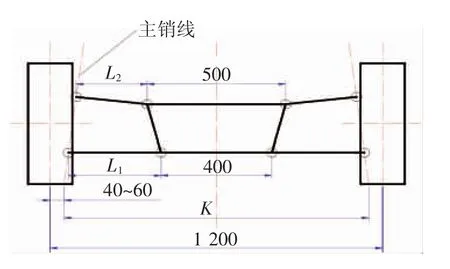
圖1 方程式賽車前懸架結構尺寸示意圖
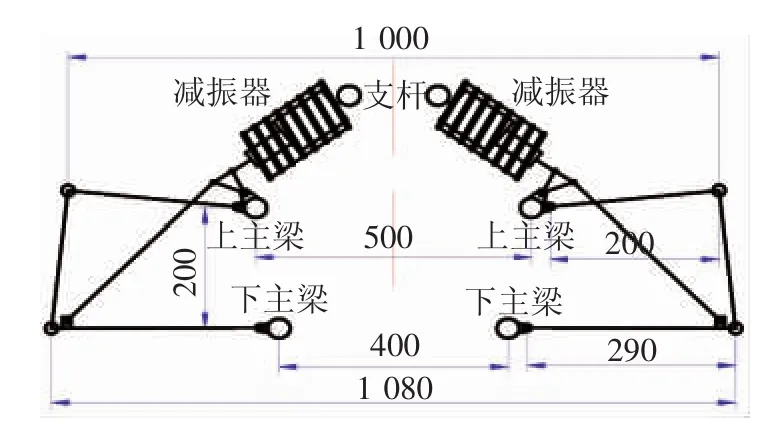
圖2 方程式賽車前懸架結構參數圖
根據圖1計算并確定前懸架下橫臂長(L1/mm),如式(1)所示。

式中:V——4個鉸鏈位置尺寸之和,取120 mm。
在設計汽車懸架時,希望輪距變化小,以減少輪胎磨損,提高使用壽命,因此應選擇L2/L1在0.6附近;同時為保證汽車具有良好的操縱穩定性,也希望前輪定位角的變化小,這時應選擇L2/L1在1.0附近[1],因此,綜合考慮取L2/L1=0.7。初定上橫臂長(L2/mm),如式(2)所示。

上橫臂的角度可由上下擺臂外端之間的距離來確定,上下擺臂的內端分別通過擺臂軸與車架作鉸鏈連接,二者的外端則分別通過球頭銷與轉向節相連。
根據初始計算及預設的懸架參數,輸入相應設計點的坐標,并且將懸架的主銷長度、主銷內傾角、主銷后傾角、上橫臂長度、上橫臂在汽車橫向平面內的傾角、上橫臂軸水平斜置角、下橫臂長度、下橫臂在汽車橫向平面內的傾角及下橫臂軸水平斜置角等參數設計為變量,建立前懸架模型圖,如圖3所示,通過優化這些設計變量以達到優化前懸架的目的[2]。
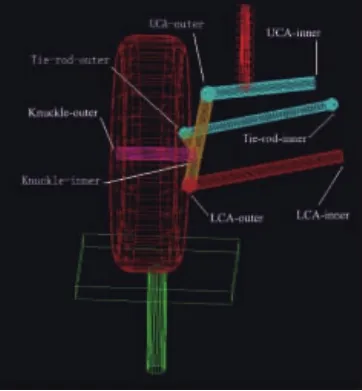
圖3 方程式賽車前懸架仿真模型截圖
2 方程式賽車懸架的優化與仿真設計
2.1 創建設計變量
在菜單欄中,選擇 Build>Deign Variable>New,創建設計變量,依次創建部分變量,如表1所示。

表1 前懸架各個參數及變量
2.1.1 前懸架主要參數的測量
設置中止時間為1 s,工作步數為100進行仿真,得到部分參數的變化曲線截圖,如圖4所示。
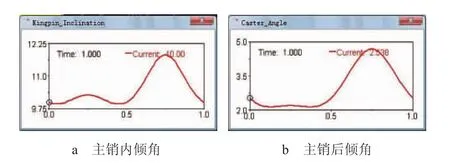
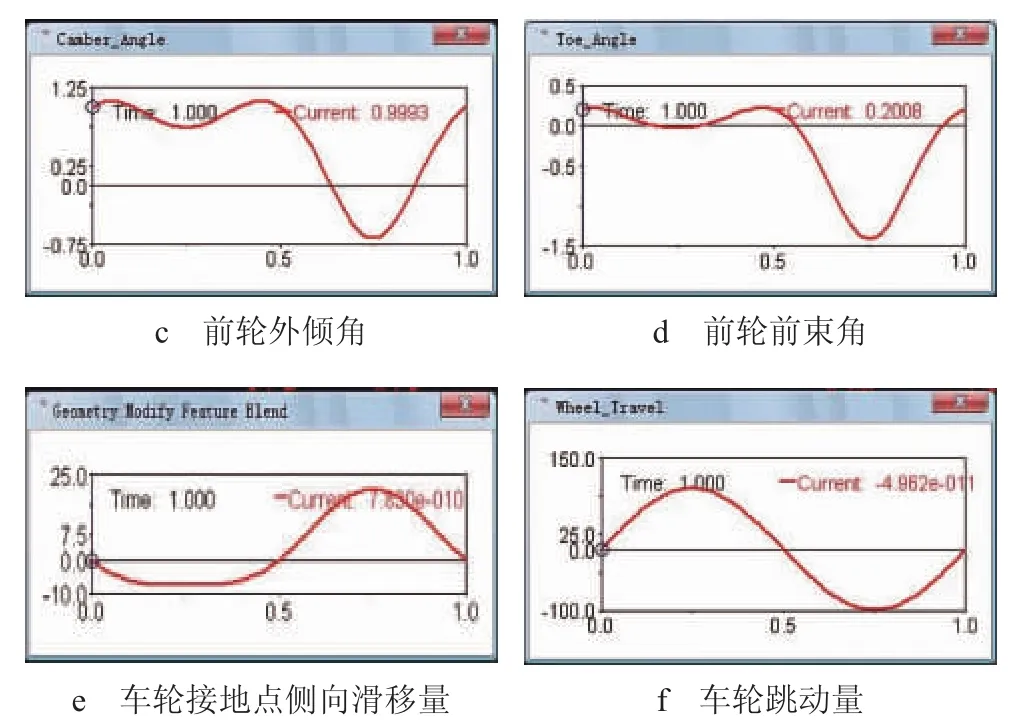
圖4 方程式賽車前懸架部分參數變化曲線仿真截圖(中止時間為1 s,工作步數為100)
2.1.2 將懸架部分零件參數化
通過下面步驟,將主銷、上橫臂、下橫臂及拉臂的長度這些設計點進行參數化。
1)在工作窗口中,右擊主銷(Kingpin),修改主銷的圓柱體,將圓柱體的長度(Length)設置為變量“DV_1”,按“OK”,完成主銷的參數化;
2)將上橫臂(UCA)圓柱體的長度(Length)設置為變量“DV_4”,按“OK”,完成上橫臂的參數化;
3)將下橫臂(LCA)圓柱體的長度(Length)設置為變量“DV_7”,按“OK”,完成下橫臂的參數化;
4)將拉臂(Pull_arm)圓柱體的長度(Length)用下面函數式表達:(SQRT((Knuckle_inner.loc_x-Tie_rod_outer.loc_x)**2+(Knuckle_inner.loc_y-Tie_rod_outer.loc_y)**2+(Knuckle_inner.loc_z-Tie_rod_outer.loc_z)**2)),保存并按“OK”,完成拉臂的參數化。
最后,選擇File>Save Datebase命令,保存前懸架模型。
2.2 優化前懸架模型
2.2.1 定義目標函數為了減輕輪胎的磨損,選擇車輪接地點側向滑移量的絕對值作為目標函數,通過對上下橫臂長度、上下橫臂在汽車橫向平面的傾角優化分析,使車輪接地點側向滑移量的絕對值最小[3]。
選擇 Build>Measure>Function>New,創建測量函數,輸入測量名稱“OBJECT_FUN”,單位選擇“length”,輸入函數表達式:ABS(.FRONT_SUSP.Sideways_Displacement),按“OK”,創建目標函數“OBJECT_FUN”,點擊仿真按鈕,設置中止時間為1 s,工作步數為100,進行仿真,得到側向滑移量的絕對值優化曲線,如圖5所示。
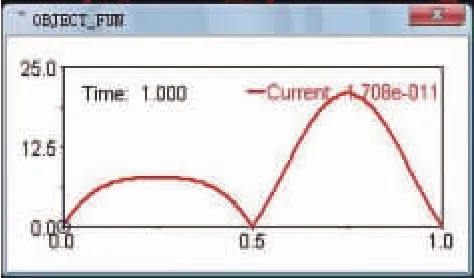
圖5 方程式賽車側向滑移量絕對值優化曲線仿真截圖
2.2.2 優化模型
優化后的主銷內傾角、主銷后傾角、輪胎外傾角及輪距變化等都比優化前的樣車方案的變化量小;同時,輪胎外傾角的變化趨勢也沒有發生變化,處在理想的狀況(彎中的內側輪有負的外傾角趨勢,并且這個角度的絕對值在控制范圍之內);這樣更有利于輪胎與地面接觸,獲得更大的抓地力[4]。
優化完成后保存模型,完成操作。
3 結論
圍繞方程式賽車的設計和研發,在ADAMS/View環境下,建立了賽車虛擬仿真模型,詳細分析了懸架定位參數對汽車操縱穩定性的影響。車輪外傾角減小為負值更符合設計要求,主銷內傾角應減小,主銷后傾角應增大便于車輪自動回正,車輪前束為負值符合優化結果。在ADAMS/View環境下對前輪定位參數的變化進行了優化,減小了其變化量,提高了懸架操縱穩定性能,為制造該賽車做出了準備。
在研究中,個別參數沒有具體的試驗數據,如整車的質心高度、轉動慣量、輪胎的側偏剛度及減振器的特性參數等,在以后試驗條件允許的情況下,通過試驗獲取更加精確的特性參數,提高仿真精度[5]。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
