海上浮式風電機半潛式平臺二階水動力計算與響應特性分析
2016-08-16 07:04:45彭春江胡燕平程軍圣沈意平
中國機械工程 2016年7期
關鍵詞:風速
彭春江 胡燕平 程軍圣 沈意平
1.湖南大學汽車車身先進設計制造國家重點實驗室,長沙,4100822.湖南科技大學,湘潭,411201
?
海上浮式風電機半潛式平臺二階水動力計算與響應特性分析
彭春江1,2胡燕平2程軍圣1沈意平2
1.湖南大學汽車車身先進設計制造國家重點實驗室,長沙,4100822.湖南科技大學,湘潭,411201
提出了基于二次脈沖響應函數法的海上浮式風電機浮式平臺二階水動力計算方法,該方法基于三維勢流理論用直接積分法求浮式平臺的二次傳遞函數,并結合波高時程,將二次脈沖響應函數法應用于浮式平臺二階水動力的計算。把計算所得二階水動力施加到海上浮式風電機整機時域動力學計算模型,計算二階水動力的激勵響應。以DeepCwind半潛式平臺為算例,其上支撐美國可再生能源實驗室5MW參考風機。先對所提出的二階水動力計算方法進行驗證,再分別在無風和有風條件下,計算一階水動力單獨激勵響應和一階二階水動力共同激勵響應,通過對比響應幅值譜、響應統計值,分析二階水動力的激勵特性。結果表明,對于半潛式平臺,慢漂力和平均漂移力有明顯的激勵作用,和頻二階水動力的激勵作用可以忽略。
海上浮式風電機;半潛式平臺;二階水動力;二次傳遞函數;響應特性
0 引言
為了開發水深超過60 m海域的風資源,在海上風電機組中配置固定式基座不再經濟可行,因此提出了用浮式平臺支撐風電機。浮式平臺由于受到波的激勵作用,其水動力特性相比固定式基座復雜得多,這使得浮式風電機整機動力學特性更加復雜。因此浮式平臺水動力特性是海上風電技術研究的一個重要方面,而建立浮式平臺水動力計算模型是浮式平臺水動力研究的重要內容之一,是研究浮式風電機整機動力學特性的基礎。
二階水動力包括差頻及和頻二階水動力,差頻二階水動力又包括平均漂移力和慢漂力。對于傳統海上浮式結構,二階水動力相比一階水動力小一個數量級以上,對于海上浮式風電機,二階水動力相比氣動力更小,且存在氣動阻尼,因此,目前對海上浮式風電機浮式平臺水動力計算,只考慮一階水動力,忽略了二階及以上的水動力[1]。但Goupee等[2]和Koo等[3]在風、浪水池中,對海上浮式風電機進行模型測試,發現二階水動力相比一階水動力和氣動力雖然很小,但在不同的風浪環境下,能激起浮式平臺的特征模態,產生共振響應,影響海上浮式風電機的運行性能和系泊系統的疲勞壽命。因此,在海上浮式風電機浮式平臺水動力計算中考慮二階水動力是必要的。
López-Pavón等[4]、Coulling等[5]根據二次傳遞函數和波高時程,用紐曼近似法計算浮式平臺的二階水動力。紐曼近似法計算簡單,有計算時間短的優勢,但只有當浮體的固有頻率很低且處在深水海域時計算出的二階水動力才是有效的,而用二次脈沖響應函數法求平臺的二階水動力是一種相對直接的方法,雖然計算時間比紐曼近似法要長,但計算結果更接近試驗測試數據[6],且沒有應用范圍的約束,更具通用性。
Karimirad[7]利用傳統海上結構物時域非線性動力學計算程序計算風電機浮式平臺的二階水動力響應,計算中把風輪簡化為風盤進行簡單的風力計算,這樣得到的二階水動力響應與實際情況相差較大。Roalda等[1]、Bayati等[8]在頻域根據二次傳遞函數直接求海上浮式風電機浮式平臺二階水動力響應,由于頻域計算不能考慮瞬態響應過程,只能得到二階水動力的穩態響應。而基于海上浮式風電機整機動力學計算模型,在時域計算浮式平臺二階水動力響應更符合實際情況。
因此,本文基于三維勢流理論用直接積分法求浮式平臺的二次傳遞函數,結合波高時程,將二次脈沖響應函數法應用于海上浮式風電機浮式平臺二階水動力計算,在海上浮式風電機整機時域動力學計算模型的基礎上,計算浮式平臺在各種環境激勵下的響應,通過對比響應幅值譜、響應統計值,分析二階水動力的激勵特性。
1 二階水動力計算
描述浮式風電機浮式平臺的運動及載荷需定義兩個坐標系:①慣性參考坐標系OXYZ,其中X軸為順風向,Z軸沿風電機塔架軸線垂直向上,原點O為Z軸與平均海平面(MSL)的交點,Y軸方向由右手定則確定;②平臺隨體坐標系O′X′Y′Z′,在未擾動位置時與OXYZ重合,該坐標系隨平臺的移動改變原點位置,隨平臺的轉動改變方向。原點O′在慣性參考坐標系OXYZ中的三個坐標分量即為風電機浮式平臺的三個平移量,X′相對X軸、Y′相對Y軸、Z′相對Z軸的轉動量即為平臺的三個轉動量,原點O′為浮式平臺的計算參考點。定義與X方向一致的波向和風向為0°波向和風向。圖1為坐標系的示意圖。

圖1 參考坐標系
本文水動力計算理論中的幾個假設:①入射波的幅值比波長小得多,這就允許使用簡單的入射波運動學理論,如線性波理論;②相比浮式平臺的大小(也即平臺的特征長度),浮式平臺的運動量很小,這樣,利用勢流理論,在平臺未擾動位置計算得到的水動力可以施加在擾動后平臺的計算參考點;③浮式平臺是剛性的;④平穩海況下波面高度是呈高斯分布的隨機過程,且是線性的。
1.1不規則波波高時程計算
在不規則海況,根據假設①和④,波高時程可以用高斯白噪聲過程經過線性濾波得到。本文所用實現方法是,在頻域用Box-Muller法計算高斯白噪聲過程,在給定海浪譜的前提下,根據平穩線性系統輸入輸出功率譜關系求得波高的頻域表示,通過傅里葉反變換求得波高時程。
在浮式平臺參考點處,不規則波的波高可表示為有隨機相位的規則波之和:
(1)
式中,ζi為單個規則波的波幅;ωi為波頻率;εi為相位。
在本文中ζ(0,0,0,t)簡寫為ζ(t),ζ(t)用高斯白噪聲過程經過線性濾波得到:
(2)
式中,w(τ)為均值為0、標準差為1的高斯白噪聲隨機變量;h(t)為線性濾波傳遞函數。
在頻域根據平穩線性系統輸入輸出功率譜關系,經傅里葉反變換可求得波高ζ(t)為
(3)
式中,S2-Sided(ω)為波高的雙側功率譜;W(ω)為w(τ)的傅里葉變換。
W(ω)用Box-Muller法計算得到:
1.2二階水動力計算
二階水動力的計算方法是先基于三維勢流理論,用直接積分法求出海上浮式風電機浮式平臺的二次傳遞函數,再對二次傳遞函數進行雙重傅里葉反變換求得二次脈沖響應函數,最后在時域,利用二次脈沖響應函數與波高的雙重卷積求總的二階水動力。實現方法是在頻域中根據波高和二次傳遞函數求出二階水動力,再進行傅里葉反變換求時域二階水動力。
利用勢流理論,對浮體濕表面進行直接壓力積分獲得二階水動力的通用表達式為

(4)
其中,變量中的上標(1)、(2)分別表示一階量、二階量,為哈密頓算符,M為浮體的質量矩陣,q為浮體平移位移矩陣,為浮體平移加速度矩陣,Ω為浮體角位移矩陣,WL表示水線,S表示濕表面,n為濕表面面元的外法線向量,(1)φ、(2)φ為速度勢,ζrel為相對水線的波高。式(4)的前三項都是一階解的二次作用,根據一階解可全部確定,最后一項與二階速度勢有關,可用勢流理論確定。式(4)的表達不方便計算,因此基于式(1)的波高表示,經推導,總二階水動力可表示成如下形式:
(5)

根據二次傳遞函數求二次脈沖響應函數gi(t1,t2):
在時域用二次脈沖響應函數計算總二階水動力為
(6)
2 數值計算
本文根據式(6)用數值計算方法實現對和頻、差頻二階水動力的求解。首先對時間和頻率進行離散,在頻域根據波高和二次傳遞函數計算每一離散頻率點的二階水動力,再用離散傅里葉逆變換求得離散時間點上的二階水動力,然后通過插值法求任意時刻的二階水動力。


(7)
其中,m取小于N/4的全部正整數,其余頻率點補零。第二項和頻二階水動力頻域離散值:
(8)
其中,k取小于m/2的全部正整數。
通過離散傅里葉逆變換求得時域離散值分別為
(9)
(10)
其中,IDFT{}表示離散傅里葉逆變換。和頻二階水動力時域離散值為
(11)


圖2 和頻二階水動力計算流程
(12)
差頻二階水動力的非零頻分量也稱慢漂力,其頻域離散值為
(13)
其中,k取小于N/2-m的所有正整數。
慢漂力的時域離散值為
(14)
(15)
差頻二階水動力的計算流程與和頻二階水動力的相似,這里就不再給出。
3 算例與分析
3.1計算對象與參數
基于以上二階水動力計算理論,結合浮式風電機整機時域動力學計算模型,針對支撐美國可再生能源實驗室(NREL)5MW參考風機[9]的DeepCwind半潛式平臺[10]進行各種響應計算,浮式平臺外形如圖3所示,結構尺寸如表1所示,質量屬性參數如表2所示,6個自由度的固有頻率如表3所示,風機的性能尺寸詳見文獻[9]。本文計算方法同樣可應用于風電機其他浮式平臺。

圖3 DeepCwind半潛式平臺及風電機示意圖

表1 半潛式平臺結構尺寸 m

表2 半潛式平臺質量參數

表3 半潛式平臺6個自由度的固有頻率
浮式平臺水動力計算選用單向不規則波模型,采用JONSWAP波譜,波向與平臺縱蕩方向一致,表4所示為本文計算選用的3種波況。有效波高Hs的值4.5 m、7.1 m、11.8 m分別代表中等、嚴峻、極限三種海況。圖4所示為所用3種有效波高的波譜S(ω),圖5所示為Hs=7.1 m時平臺參考點處的波高時程ζ(t)。從波譜圖可知,有效波高不同,一階波頻區間稍有不同,為了減少二階水動力計算量,根據一階波頻區間確定差頻、和頻二階水動力的計算范圍如表5所示。由表3可知,半潛式平臺6個自由度的固有頻率都處于中等海況一階波頻區間之外的低頻段。對于嚴峻和極限海況,垂蕩固有頻率處于一階波譜區間。

表4 計算波況(JONSWAP譜)

圖4 有效波高分別為4.5 m、7.1 m、11.8 m的JONSWAP譜
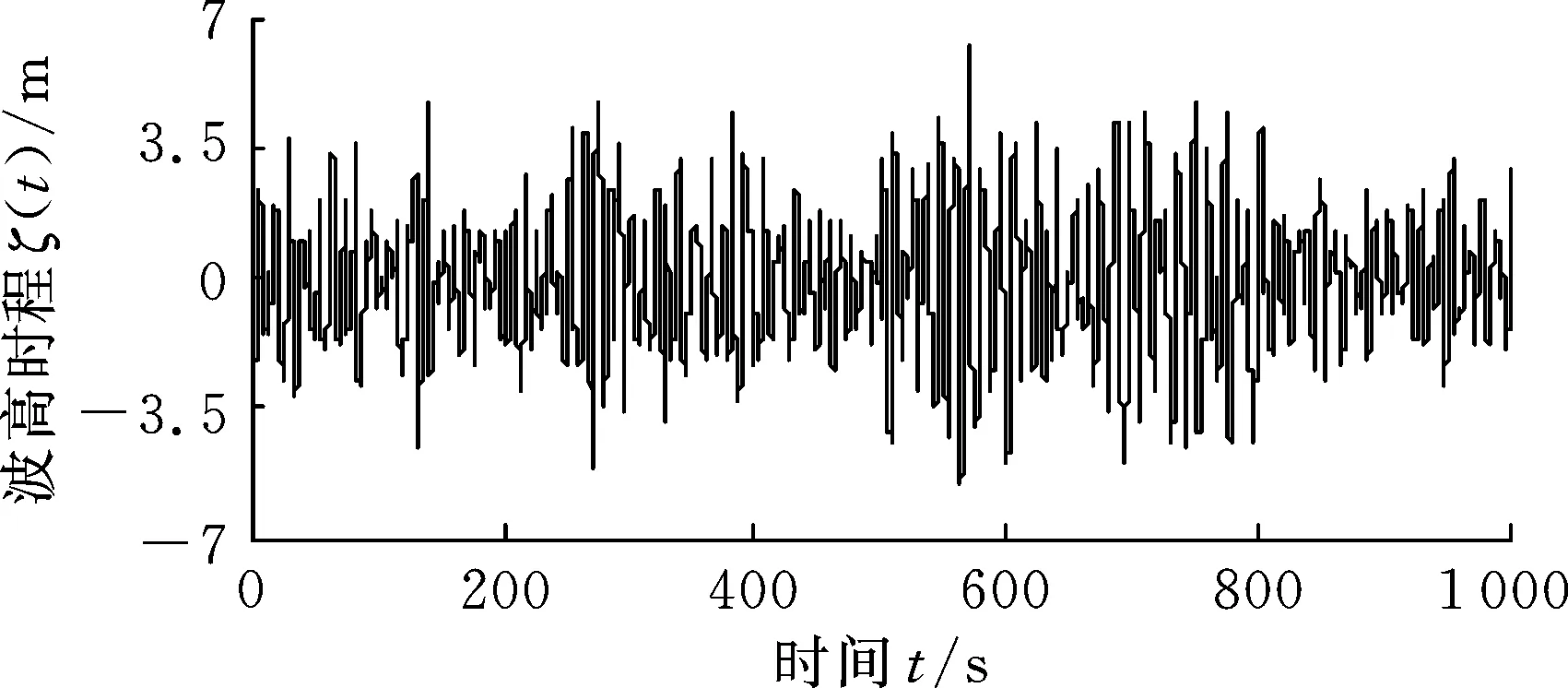
圖5 有效波高為7.1 m時參考點處的波高時程

表5 二階水動力計算頻率范圍 Hz
為了深入理解波頻作用,排除湍流風低頻激勵作用的影響,選用穩態風進行激勵,計算風速8 m/s、16 m/s、23 m/s分別代表風機額定風速以下、額定風速以上、臨近切出風速時的風況。風向與波向一致,也即0°風向。
浮式風電機整機動力學計算的氣動載荷模型采用葉素動量定理,考慮輪轂、葉尖損失。結構動力學建模采用凱恩方法結合模態疊加法,系泊系統采用準靜態模型,一階水動力計算模型參考文獻[9],拖曳阻力采用莫里森公式中的拖曳項計算。水深200 m,平臺吃水20 m,平臺構件所用拖曳系數:主圓柱0.58,上圓柱0.61,基圓柱0.68,支架0.63。本算例中所使用的附加縱蕩線性阻尼為1×106N/(m/s),附加橫搖和縱搖線性剛度為1.45×109N·m/rad,附加縱蕩二次阻尼為2.25×106N/(m/s)2,附加二次縱搖阻尼為5×106N·m/(rad/s)2。浮式平臺響應計算時長為1000 s,取后500 s進行統計值計算。
3.2二階水動力計算方法驗證
文獻[2-3]對本算例中的半潛式浮式風電機進行了1∶50比例模型風浪水池測試。圖6所示為在無風波況2作用下,半潛式平臺縱蕩和縱搖響應功率譜Pi(ω) 的計算結果與試驗結果。從圖6可以看出計算結果與試驗結果基本一致,這說明水動力(包括一階和二階)計算模型和方法是可行的。在低頻段,縱蕩和縱搖固有頻率處的共振峰由差頻二階力激勵所致,用本文二階水動力計算方法很好地呈現了試驗結果,這說明本文二階水動力計算方法的正確性。

(a)縱蕩響應功率譜

(b)縱搖響應功率譜圖6 無風波況2作用下,一階二階水動力共同激勵響應功率譜計算結果與測試結果
3.3響應計算與分析
本文針對以下兩種激勵條件,計算和分析二階水動力對半潛式平臺的激勵響應:①無風只有波激勵;②風、浪聯合激勵。對應海上浮式風電機的正常運行狀態和生存狀態,處于正常運行狀態時受風、浪的聯合激勵,處于生存狀態時風電機停機,風輪葉片順槳,此時風大但風力小,主要受波力的作用,與無風只有波激勵的情況相似。
3.3.1無風二階水動力激勵特性
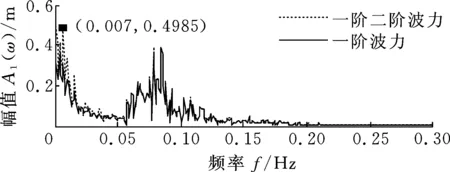
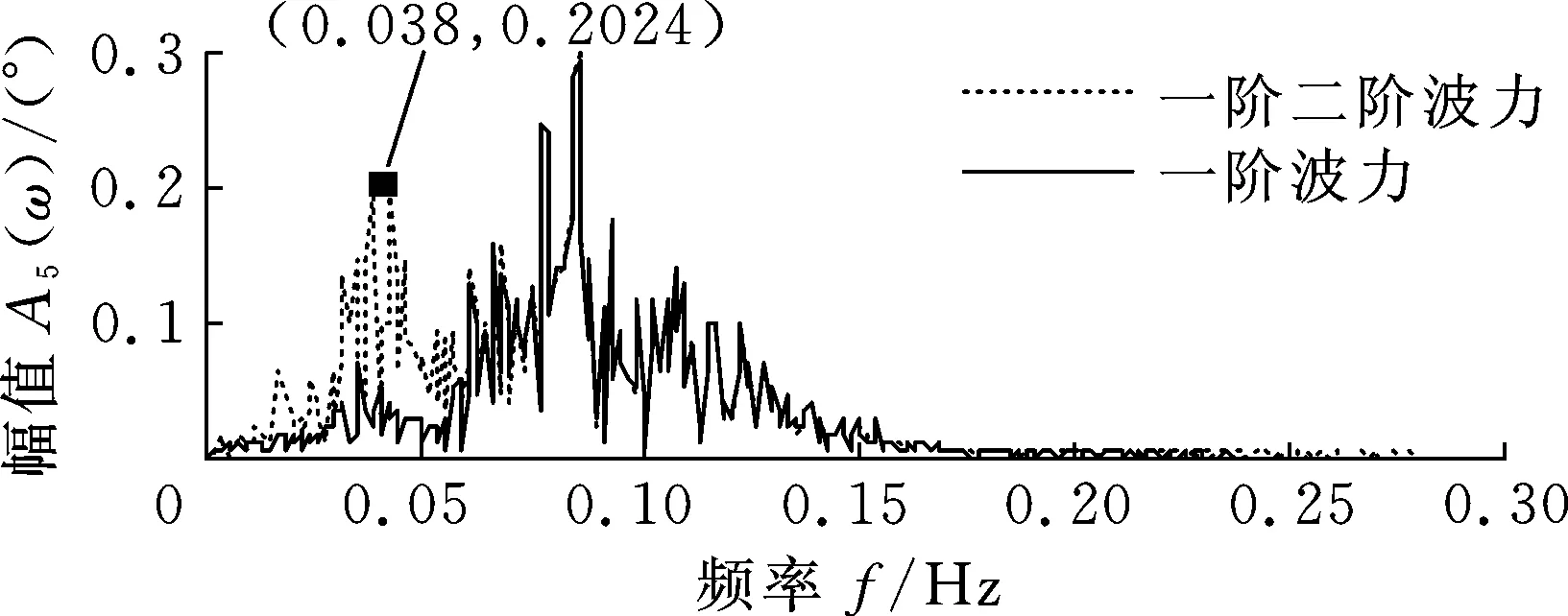
圖7所示為無風、波高為7.1 m時,一階水動力單獨激勵與一階二階水動力共同激勵下,平臺各自由度的響應幅值譜Ai(ω)。從圖7可知,在無風條件下,0°波向的二階水動力在橫搖固有頻率處激起了明顯的共振峰,但激勵幅值很小,可視為無響應,考慮二階水動力對橫搖的影響無實際意義。橫蕩和艏搖也是如此,幅值譜就不再給出。對于縱蕩和縱搖,一階水動力在整個低頻區間0~0.056 Hz有一定的激勵幅值,在固有頻率處甚至有幅值不大的一階水動力共振峰。二階水動力對整個低頻區間的激勵有所增強,在固有頻率處激起了大幅值的共振峰。垂蕩固有頻率為0.058 Hz,處于一階波頻區間,從垂蕩幅值譜可見一階水動力在固有頻率附近激勵幅值較大。二階水動力在整個低頻區間對垂蕩的激勵都較弱。在波高為4.5 m和11.8 m的海況中,半潛式平臺各自由度的響應幅值譜與波高為7.1 m海況的響應幅值譜相似,因此其他兩種海況下的響應幅值譜不再給出。

(a)縱蕩響應幅值譜

(b)垂蕩響應幅值譜

(c)橫搖響應幅值譜

(d)縱搖響應幅值譜圖7 波高7.1 m、無風時,一階水動力激勵和一階二階水動力共同激勵響應幅值譜
表6所示為無風條件下,波高分別為4.5 m、7.1 m、11.8 m時,一階水動力單獨激勵和一階二階水動力共同激勵平臺各自由度響應均值和標準差。從表6可看出,一階二階水動力共同激勵與一階水動力單獨激勵響應之間存在均值差和標準差差值。均值差主要是平均漂移力激勵所致,因此可用均值差衡量平均漂移力的激勵作用。標準差可衡量響應的振蕩幅值,用標準差差值衡量慢漂力的激勵作用。

表6 無風不同波高條件下,平臺一階波激勵與一階二階波共同激勵響應統計值
表7所示為無風條件下,波高分別為4.5 m、7.1 m、11.8 m時,一階水動力單獨激勵和一階二階水動力共同激勵平臺各自由度響應均值差和標準差差值。從表7可知,在三種海況下,平均漂移力會使縱蕩響應發生較大的漂移,垂蕩和縱搖響應的漂移值較小。各自由度響應均值差隨波高變化,但不是單調的。縱蕩響應標準差差值最大,縱搖次之,垂蕩很小,這說明慢漂力對縱蕩和縱搖可以激起較大的振蕩幅值,對垂蕩的激勵作用很弱。標準差差值隨波高變化,也不是單調的,因此平均漂移力和慢漂力對平臺各自由度的激勵作用會隨波高變化,但不是單調的。
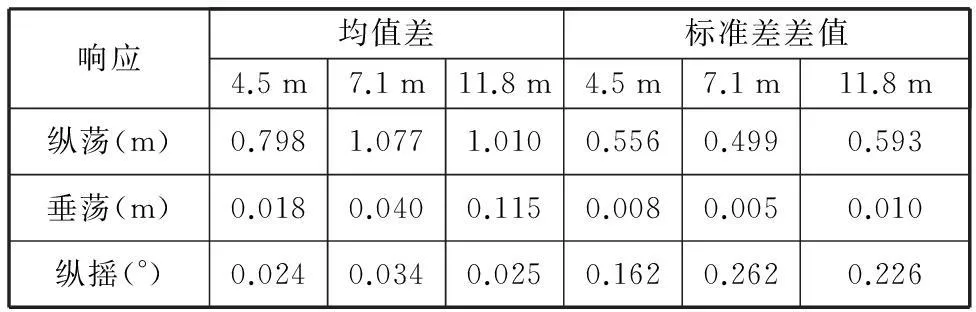
表7 無風不同波高情況下,平臺一階波激勵與一階二階波共同激勵響應均值差和標準差差值
3.3.2風浪聯合作用下二階水動力激勵特性
圖8所示為波高7.1 m、風速8 m/s時,一階水動力單獨激勵和一階二階水動力共同激勵下,平臺各自由度響應幅值譜。從圖8看到,在風浪聯合作用下,一階水動力在橫搖固有頻率附近激起了明顯的共振峰,二階水動力增強了共振峰,但幅值很小,橫蕩和艏搖的情況也是如此,相似的圖就不再給出。
圖8中,對于縱蕩和縱搖,一階水動力在整個低頻段有一定的激勵幅值,二階水動力在固有頻率附近出現了幅值不大的共振峰。對于垂蕩,一階水動力在0.058 Hz附近的激勵幅值較大,這是固有頻率處于一階波頻區間的緣故,二階水動力在整個低頻范圍稍有增強激勵幅值。對波高為7.1 m,風速分別為16 m/s、23 m/s,波高為4.5 m和11.8 m,風速分別為8 m/s、16 m/s、23 m/s的風浪聯合激勵響應幅值譜與圖8相似,因此不再給出圖。
(a)縱蕩響應幅值譜

(b)垂蕩響應幅值譜

(c)橫搖響應幅值譜
(d)縱搖響應幅值譜圖8 波高7.1 m、風速8 m/s時,一階水動力激勵和一階二階水動力共同激勵響應幅值譜
表8是波高為7.1 m,風速分別為8 m/s、16 m/s、23 m/s時,一階水動力單獨激勵和一階二階水動力共同激勵響應統計值。從表8可知,縱蕩均值差在不同風速下約為1 m,隨風速變化很小,垂蕩和縱搖響應均值差不大,隨風速基本不變。這說明平均漂移力對縱蕩響應的影響較大,對垂蕩和縱搖響應的影響較小,且基本上不受風速的影響。縱搖標準差在三種風速下分別為0.125、0.140、0.160,縱蕩和垂蕩的標準差差值比縱搖小一個數量級,且各自由度的標準差差值隨風速變化很小。這說明在風浪聯合作用下,慢漂力對半潛式平臺各自由度的激勵作用都較弱,且隨風速變化基本不變。
表9是風速為8 m/s,波高分別為4.5 m、7.1 m、11.8 m時,一階水動力單獨激勵和一階二階水動力共同激勵響應統計值。從表9可知,縱蕩、垂蕩、縱搖均值差隨波高變大,標準差差值總體來說都很小,隨波高有變化,但不是單調的。這說明在風浪聯合作用下,平均漂移力對縱蕩、垂蕩、縱搖的激勵作用隨波高變化,即波高越大,激勵作用越強。

表8 波高7.1 m時,不同風速下一階水動力激勵和一階二階水動力共同激勵響應均值差和標準差差值

表9 風速8 m/s時,不同波高下一階水動力激勵和一階二階水動力共同激勵響應均值差和標準差差值
慢漂力對半潛式平臺各自由度的激勵作用都較弱,且隨波高有相對較大的變化。
3.3.3其他激勵特性對比
圖9是波高4.5 m,無風和有風一階二階水動力共同激勵下,半潛式平臺縱蕩和縱搖響應幅值譜,有風時的風速為8 m/s。從圖9可知,對于縱蕩和縱搖,有風條件下二階水動力激勵幅值相比無風時的要小很多,這是因為在有風條件下存在氣動阻尼,抑制了二階水動力的激勵作用。

(a)縱蕩響應幅值譜

(b)縱搖響應幅值譜圖9 波高4.5 m,風速8 m/s,無風和有風一階二階波共同激勵浮式平臺自由度響應幅值譜
在有風條件下,本文計算的縱蕩和縱搖響應幅值譜與文獻[2]試驗測得的響應譜有差別,文獻[2]中氣動阻尼幾乎完全抑制了低頻共振響應,而本文在低頻段仍有較小的響應幅值,這是由于在計算模型中縱蕩和縱搖阻尼過小造成的。
從圖7、圖8還可看出,在和頻二階水動力計算頻率范圍0.112~0.480 Hz,縱蕩、垂蕩及縱搖響應幅值譜幾乎不受二階水動力的影響,這說明在無風或有風條件下,和頻二階水動力對半潛式平臺的激勵作用可以忽略。
4 結論
本文針對海上浮式風電機,提出浮式平臺二階水動力的通用計算方法,并結合海上浮式風電機整機時域動力學計算模型。以支撐美國可再生能源實驗室(NREL)5MW參考風機的DeepCwind半潛式平臺為算例,在無風或有穩態風時,在一階二階水動力共同激勵下,用本文計算方法計算的縱蕩、縱搖響應譜與文獻[2]試驗測得的響應譜相近,驗證了本文計算方法的可行性。
基于本文提出的計算方法,通過對算例的計算和分析,結果表明,對于半潛式浮式平臺在本文計算條件下有如下結論:
(1)在無風或有風時,可忽略和頻二階水動力的激勵作用,只考慮平均漂移力和慢漂力的激勵作用。
(2)在無風時,慢漂力能激起縱蕩和縱搖特征模態,產生低頻共振響應,且響應幅值隨波高變化。平均漂移力對縱蕩的影響較大,對縱搖的影響較小,且隨波高變化。
(3)在風浪聯合激勵下,由于存在氣動阻尼,慢漂力在縱蕩、縱搖固有頻率附近的激勵幅值明顯受到了抑制,隨風速基本不變,隨波高有相對較大的變化。平均漂移力對縱蕩的激勵較強,對縱搖的激勵較弱,隨風速基本不變,隨波高激勵增強。
(4)在無風或有風時,二階水動力對垂蕩的激勵作用都很弱。
[1]Roald L,Jonkman J,Robertson A,et al. The Effect of Second-order Hydrodynamics on Floating Offshore Wind Turbines[J]. Energy Procedia,2013,35:253-264.
[2]Goupee A J,Koo B,Kimball R W,et al. Experimental Comparison of Three Floating Wind Turbine Concepts[J]. Journal of Offshore Mechanics and Arctic Engineering, 2014,136(2):020906.
[3]Koo B,Goupee A J,Lambrakos K,et al. Model Tests for a Floating Windturbine on Three Different Floaters[J]. Journal of Offshore Mechanics and Arctic Engineering, 2014,136(2): 020907.
[4]López-Pavón C,Watai R A,Ruggeri F,et al. Influence of Wave Induced Second-order Forces in Semi-submersible FOWT Mooring Design[J].Journal of Offshore Mechanics and Arctic Engineering,2015,137(3):031602.
[5]Coulling A J,Goupee A J,Robertson A N,et al. Validation of a FAST Semi-submersible Floating Wind Turbine Numerical Model with DeepCwind Test Data[J]. Journal of Renewable and Sustainable Energy,2013,5(2):023116.
[6]Pinkster J A,Huijsmans R H M. The Low Frequency Motions of a Semi-submersible in Waves[C]//BOSS Conference.Cambridge,Massachusetts,1982:447-466.
[7]Karimirad M. Modeling Aspects of a Floating Wind Turbine for Coupled Wave-wind-induced Dynamic Analyses[J].Renewable Energy,2013,53:299-305.
[8]Bayati I,Jonkman J,Robertson A,et al. The Effects of Second-order Hydrodynamics on a Semisubmersible Floating Offshore Wind Turbine[R]. Golden,CO:The National Renewable Energy Laboratory (NREL),2014.
[9]Jonkman J M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine[D]. Fort Collins:Colorado State University,2001.
[10]Benitz M A,Schmidt D P,Lackner M A,et al. Comparison of Hydrodynamic Load Predictions between Engineering Models and Computational Fluid Dynamics for the OC4-DeepCwind Semi-Submersible[C]//The ASME 2014 33rd International Conference on Ocean,Offshore and Arctic Engineering. San Francisco,California,2014.
(編輯郭偉)
Second-order Hydrodynamics Computation and Response Characteristic Analysis for a Semi-submersible Offshore Floating Wind Turbine
Peng Chunjiang1,2Hu Yanping2Cheng Junsheng1Shen Yiping2
1.State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University,Changsha,410082 2.Hunan University of Science and Technology,Xiangtan,Hunan,411201
A second-order hydrodynamics computation method was proposed based on the quadratic impulse response function technique for offshore floating wind turbines. Firstly,the quadratic transfer functions were calculated using the direct integration method through three-dimensional potential theory. Secondly,the quadratic impulse response function technique was applied to compute the second-order hydrodynamics in terms of the quadratic transfer functions and wave elevation. Lastly,the resulting second-order hydrodynamics was acted on the integrated dynamics model of offshore floating wind turbine in time domain. So the excitation response of the second-order hydrodynamics might be computed. Taking the DeepCwind semi-submersible platform supporting the NREL 5-MW offshore baseline wind turbine for case,the verification of the second-order hydrodynamics computation method presented was conducted,and various excitation responses were calculated and analyzed. The results show the slow drift force and mean drift force have notable influences on semi-submersible platform,but the sum frequency second-order force can be neglected.
offshore floating wind turbine; semi-submersible floating platform; second-order hydrodynamics; quadratic transfer function; response characteristic
2015-05-21
國家自然科學基金資助項目(51075131,11572125)
TK83DOI:10.3969/j.issn.1004-132X.2016.07.018
彭春江,女,1977年生。湖南大學機械與運載工程學院博士研究生,湖南科技大學機電工程學院講師。主要研究方向為海上浮式風力發電機組動力學及控制系統。胡燕平,男,1957年生。湖南科技大學機電工程學院教授、博士研究生導師。程軍圣,男,1968年生。湖南大學機械與運載工程學院教授、博士研究生導師。沈意平,女,1982年生。湖南科技大學機械設備健康維護省重點實驗室副教授、博士。
猜你喜歡
氣象與環境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31