一種基于自主航行的無人水面測量船的研制
2016-08-16 08:42:46馬詩聰劉吉桃
江蘇船舶 2016年3期
關鍵詞:測量
馬詩聰 ,劉吉桃
(1.中國地質大學 機械與電子信息學院,湖北 武漢 430074;2.武漢勞雷綠灣船舶科技有限公司,湖北 武漢 430073)
?
一種基于自主航行的無人水面測量船的研制
馬詩聰1,劉吉桃2
(1.中國地質大學 機械與電子信息學院,湖北 武漢 430074;2.武漢勞雷綠灣船舶科技有限公司,湖北 武漢 430073)
研制了一種用于河流、湖泊、淺水、近灘自主航行的無人水面測量系統。該系統可搭載多種傳感器,包括聲學多普勒流速剖面儀ADCP、單波束測深儀、聲納等。其組成包括岸基(母船)控制單元和無人水面測量單元,其中岸基控制單元利用無線網橋通信遙控測量船自主航行或走航測量并實時接收測量數據,無人水面測量單元搭載差分GPS、慣性導航系統、單波束測深儀、攝像頭和數據交換工控系統。目前已經過多次湖試,驗證了無人水面測量船用于水下測量、水質采樣的可行性和實用性。
無人船;水面測量船;自主航行;差分GPS;慣性導航單元
0 引言
無人測量船是一種多用途的測量平臺,可搭載多種測量傳感器用于相關的測量,并且運輸簡單,攜帶方便。無人測量的方式在內河及海洋將成為測繪行業的重要技術手段,實時、無人、自動測量、自主定位、自主導航是現代內河及海洋測量的一種現代化趨勢。近幾年,我國在無人船領域方面獲得了重大的發展[1]。例如珠海云洲智能科技有限公司研發了一款型號為ME70中型自動測量船包括單波束測深儀系統、 側掃聲納系統、雙頻GPS及姿態儀系統,同時還有用于船載數據采集備份的平板工控機和用于測量數據實時傳輸的數傳電臺,以及搭載有地貌測繪軟件的地面測量基站,但其自主測量采用的電子羅盤容易受到地磁干擾而丟失測量數據;通信采用電臺通信,受距離限制,傳輸帶寬低。國家海洋局研發一款雙體測量船用于水深測量。國外麻省理工研發了一款名為SCOUT用于水聲通訊中繼任務[2]。波爾圖大學研發了一款名為ZARCO用于水下調查,并進行了相關試驗[3]。
本文研制一款具有自動駕駛功能的測量船,其智能運動控制系統總體目標為:操作員通過基站設定航行任務,相關執行器根據航線信息和差分GPS或北斗位置,慣導的姿態、航向、方位等位置信息,實時計算出航線跟蹤所需要的航向角和航速,并解算出所需的舵角,沿著事先設定的路徑航行。另一方面,實時計算出航速,通過加速度傳感器實現航速的控制,并實時對電機的轉速、電池電量進行實時監控;把攝像機圖像信息及相關的測量儀器通過無線通信實時傳輸給基站,供監控人員進行作業監控和航線更改[4-5]。
1 系統結構
研制的自主航行的無人水面測量船主要由岸基控制系統和船載動力系統構成,這兩部分采用無線網橋進行通信與控制。系統框架圖如圖1所示。
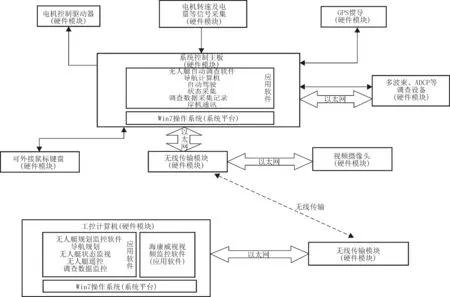
圖1 無人水面測量船系統框架圖
無人水面測量艇系統除了艇身結構與動力系統外,還配有定位慣導傳感器、光學攝像頭、多波束等測量設備、采集導航與控制通訊系統,可以實現自主航行、調查采集與記錄功能,并具備與岸機通訊實時回傳數據、修改航跡與遙控航行等功能。岸機系統主要為1臺配備無線收發模塊的工控機算機,用于實現無人艇作業前的規劃設計、無人艇作業期間的實時狀態、調查數據監視以及無人艇的航行遙控。
2 無人水面測量艇船體構成
無人水面測量艇上件采用不銹鋼材質滾床而成,雙浮體采用高分子聚尿合成,具有抗壓、耐磨、浮力大等特點。雙浮體支架采用鋁合金安裝支架,可拆卸,可折疊,方便安裝運輸。動力采用推進器為2臺DC24 V直流無刷電機,功率分別為500 W,共1 000 W。驅動器為配套直流無刷控制器,輸出信號為0~5 V電壓信號,2套驅動器分別控制2套直流無刷電機,可實現差動轉向。當左驅動器的電壓信號大于右驅動器的電壓時,左直流無刷電機的轉速快于右直流無刷電機,此時船體向右轉向;反之,船體向左轉向。當左直流無刷電機與右直流無刷電機的驅動信號一致時,船體向正前方向推進。船體的主要性能參數見表1,船體的主要構成如圖2所示。

表1 無人水面測量船的主要參數
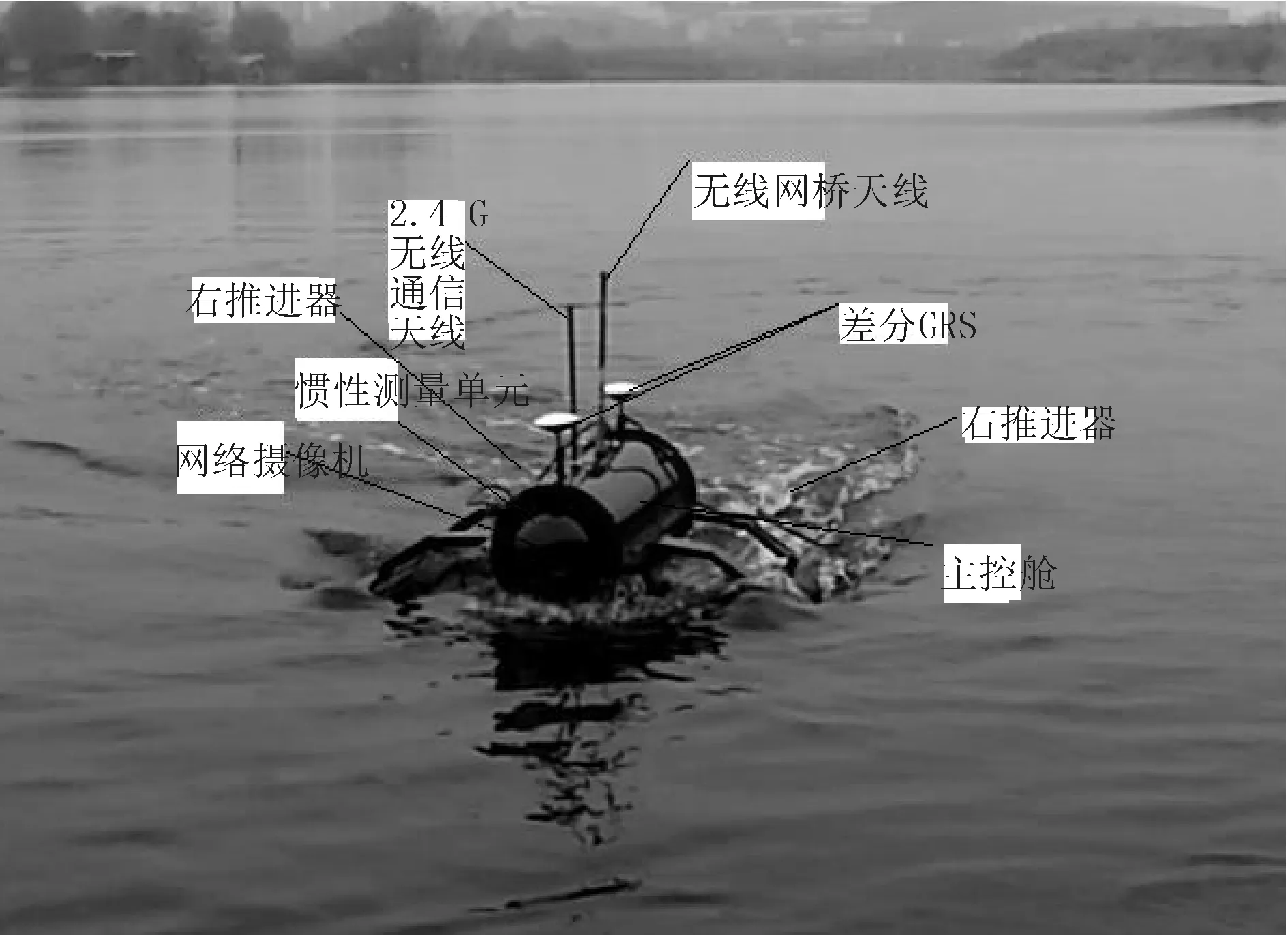
圖2 無人水面測量船船體構成
主控艙包含中央控制器、工控主機、驅動器、磷酸鐵鋰電池、無線網橋傳輸組件和慣性導航單元主機。慣性導航單元以MEMS慣性測姿技術為基礎,融入高精度衛星RTK定位及定向技術,搭載全新一代MEMS慣性/高精度衛星組合導航算法引擎,可有效解決動態車輛在復雜環境下的高精度位置和航姿測量難題,大大提高了衛星導航抗多路徑干擾的能力。同時,由于與里程計相結合,即使衛星信號受到遮擋或一段時間內沒有衛星定位信號,也能保證其有較好的位置精度。其相關參數見表2。

表2 慣性導航單元主要參數
無線網橋通信采用美國UBNT全新原裝進口Bullet M5 HP大功率600 mW,5.8 G 802.11a/n,內存32 M,CPU Atheros 400 MHZ,POE網線供電,RJ45以太網接口,無線帶寬可達到100 M以上,可以完全滿足工控機的數據傳輸以及高清網絡攝像頭的實時傳輸。岸基控制系統將相關的遙控指令或者路徑規劃指令通過岸基無線網橋發射端發送到船端的無線網橋的接收端,無線網橋接收端將接收到的指令傳送到船端工控計算機。工控計算機將相關指令發送到相關的執行機構,完成船體的相關的自主航行與自主測量。
3 無人水面測量船地面站岸基控制系統
無人水面測量船岸地面站岸基控制系統主要包括地面站工控計算機、地面站控制軟件、地面站岸基無線網橋發射端、手持遙控器、鋰電池及逆變電源。
3.1地面站工控計算機
地面站工控計算機FieldGo M9X是一個加固性Intel Xeon的便攜式計算機多平臺便攜式工作站,集成了先進的計算機組件在一個緊湊的堅固的鋁合金外殼。其多擴展槽和多驅動器設計提供工作站性能、可擴展性和便攜功能。FieldGo M9X支持431.79 mm(17 in)TFT液晶屏,多處理器配置,作為PCIe和PCI擴展槽和多個磁盤驅動器托架。鋁合金底盤強化橡膠保險杠是強大和堅固的經得起最苛刻的現場條件。支持Intel Xeon E5 2600 系列CPU、431.79 mm(17 in)1 280 mm×1 024 mm LCD、1×133.25 mm(5.25 in) 外部驅動器托架、1×超薄光驅位、2×88.9 mm(3.5 in)內部驅動器架。該設備攜帶方便,適合戶外長時間工作與測量。
3.2地面站控制軟件
地面站控制軟件是通過Visual C++編寫而成,能夠在WIN7和WIN10系統下運行。其主要結構包括串口控制、采樣路徑設置、控制方式選擇、下載測量數據、系統狀態、百度衛星地圖加載、船的姿態顯示、航行速度顯示、船的動力電池電量的實時監控、主控艙溫度的實時監控及采樣日志,并生成采樣報告。其中采樣路徑設置包括路徑規劃完成、清除路徑、發送任務、開始定位等功能,并能實時傳回由船端海康威視攝像機的圖像,方便操作測量與采樣。
軟件的調試窗口可以實時監控慣性導航的相關參數的運行情況,包括當前船航向角、X角速度、俯仰角、Y角速度、橫滾角、Z角速度、東向速度、X加速度、北向速度、Y加速度、天向速度、Z加速度、航行速度、目標航速、當前經度、當前緯度、目標距離、采樣標志、GIS狀態、GPS收星狀態、慣導狀態、控制板溫度、電池電壓、左舵DAC、右舵DAC、左舵信號電壓、右舵信號電壓、目標航向、航向偏差、目標經度、目標緯度、PID設置和速度設置,可以把每次測量的相關參數保存,供事后分析使用,為測量工作帶來極大的便利性。無人測量船上加載有溫度傳感器和電壓傳感器,可以實時將主控艙的溫度和鋰電池電壓實時傳回岸端基站。
3.3地面站無線網橋
地面站無線網橋與船端無線網橋實現點對點雙向通信,最大帶寬可以達到100 M以上。本系統設置有失控保護功能,當船端無法將圖像信息和相關傳感器的數據傳回地面站或地面站規劃路徑無法發出自主導航路徑到船端時,說明無線網橋丟失信號,或者通信鏈路出現問題。此時如果在3 min之內,船端或者地面站無響應通信恢復正常,無人水面測量船將按最初的原始路徑自動返航致最初的原始起點,并可以自動存儲所有測量數據于船端工控機內,保證測量數據的安全。
3.4手持遙控器
手持遙控器通過2.4 GHZ無線遙控無人水面測量船。測量的相關人員可以通過地面站軟件實現手動遙控和自主航行自由切換,滿足不同的測量環境和要求。鋰電池及逆變電源可以實時為地面站工控機提供不間斷交流電,保證在戶外長時間、不間斷測量。
4 結論
本文研制的基于自主航行的無人水面測量船采用雙浮體結構,具有較強的抗風浪能力,有效載荷能力大,是一種通用的復合平臺,能搭載各種不同的測量設備和傳感器。模塊化的艙室管理及穩定可靠的工控計算機,能同時處理包括1 080 P的視頻圖像及測量儀器地形地貌的相關數據。接口采用通用的RS232接口,能適用于各種設備和傳感器的連接與通信。實驗表明,無人水面測量船用于水質采樣、水文監測、水文勘察及港口視頻監控,具有良好的效果及較好的應用前景。目前,該無人水面測量船在武漢東湖及武漢嚴西湖進行了一系列的應用試驗,真正投入商用還需要進一步完善與測試,以保證系統的穩定性與可靠性。
[1]金久才,張杰,馬毅,等.一種無人船水深測量系統及實驗[J].海洋測繪,2013,3(2):53-56.
[2]Curcio J, Leonard J, Patrikalakis A.SCOUT-alow cost autonomous surface platform for research in cooperative autonomy[J]. Oceans,2005:725-729.
[3]Almeida C, Franco T, Ferreira H, et al.Radar based collision detection developments on USV ROAZ II[J].Oceans 2009-Europe,2009:1-6.
[4]Casalino G, Turetta A, Simetti E.A three-layered architecture for real time path planning and obstacle avoidance for surveillance USVs operating in harbour fields[J].Oceans 2009-Europe,2009:1-8.
[5]Corneliussen J. Implementation of a guidance system for cybership II[J].Master′s thesis, 2003:36-39.
2016-03-23
馬詩聰(1995—),男,本科,研究方向為機械與電子信息;劉吉桃(1986—),男,工程師,研究方向為無人艇控制系統。
U674.82
A
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
