瑞智型相控陣ADCP在印度尼西亞卡揚河的應用探討
2016-08-11 07:24:51汪洪能吳士夫
水利水電快報 2016年7期
羅 興 汪洪能 吳士夫
(長江水利委員會水文局 長江中游水文水資源勘測局,湖北 武漢 430012)
?
水文測驗
瑞智型相控陣ADCP在印度尼西亞卡揚河的應用探討
羅興汪洪能吳士夫
(長江水利委員會水文局 長江中游水文水資源勘測局,湖北 武漢430012)
摘要:瑞智型相控陣聲學多普勒流速剖面儀(ADCP)為一款用于走航測量流量的新型ADCP,具有體積小、精度高、安裝使用便捷,可適用于不同水深和水流條件等優點。通過在印度尼西亞卡揚河的應用實例,介紹和總結了該儀器的使用方法,并對其性能和實用性進行了探討。分析表明,該款ADCP具有廣闊的應用前景。
關鍵詞:流量測驗;應用實例;瑞智型相控陣ADCP;相控陣
1 概 述
聲學多普勒流速剖面儀(ADCP)具有能直接測出斷面的流速剖面、不擾動流場、測驗歷時短、測速范圍大等特點,可廣泛應用于各種水流條件下的流量測驗和流速流向測驗[1-2]。瑞智型(RiverRay)相控陣ADCP是美國勞雷(TRDI)工業公司最新研發的一款用于走航測量流量的ADCP,突破了以往ADCP必須由用戶根據現場情況設置作業參數的局限,采用智能化、自動化設計理念,使用戶幾乎無需做任何設置就可以進行流量測量。
本文就該儀器在印度尼西亞卡揚河流域的應用,介紹和總結了該儀器的使用方法。
2 ADCP測流原理及相控陣技術
2.1聲學多普勒效應
當聲源與接收物體以相對速度v相對運動時,接收物體所收到的振動頻率與振動源所發出的頻率有所不同,即為多普勒效應。由多普勒效應所形成的頻率變化稱為多普勒頻移,它與相對速度v成正比,與振動頻率成反比[3]。
2.2走航式ADCP測量原理
ADCP利用聲學多普勒效應進行測流,通過換能器發射出一定頻率的脈沖,該脈沖遇到水體中的懸浮物質后,產生后向散射回波信號,該信號為ADCP所接收。懸浮物質隨水流而漂移,使該回波信號的頻率與發射的頻率之間產生一個頻差,即多普勒頻移。
從理論上講,走航式ADCP流量測量原理與傳統的人工船測或纜道測量等基本原理一樣,即在測流斷面上布設多條垂線,在每條垂線處測量水深及多點流速,計算得到垂線的平均流速。
走航式ADCP實測的是斷面中部區域內的流速,該區域稱為ADCP實測區。另有以下幾個小區域為ADCP盲區:①水面區域。厚度為ADCP換能器的入水深度加上ADCP的盲區。②河底區域。河底接口對聲波的干擾而造成的盲區,或者稱之為旁瓣區。③岸邊區域(左右岸兩個區域)。由于靠岸邊水較淺,測量船只無法靠近而造成不能直接測量,或者因ADCP本身的原因,不能實測,稱為非實測區。水面、河底區域、岸邊區域的流量可通過實測區資料的外延來估算。
2.3相控陣技術
寬帶ADCP是利用一對寬帶脈沖信號,通過測量該對脈沖信號的回波脈沖時間間隔變化來測量水流速度[4]。為測得水流流速,ADCP需要同時向水介質發射4個波束的聲波脈沖信號,每個聲波脈沖的傳播方向與垂線的夾角都為θ,如圖1所示,ADCP沿這4個方向發射的聲波波束結構稱為JANUS結構。以前的ADCP產品同時采用4個相同的換能器陣,發射4個JANUS結構的波束。針對每個波束,需要對于每個換能器的發射信號進行獨立移相(或時間延遲)處理,其相位控制量為
(1)
式中,φ為相鄰陣元接收信號相位差;f為發射頻率,Hz;λ為波長,mm;τ為相鄰陣元間的信號時延,s;c為波束在介質中的傳播速度,m/s;d為換能器之間的間距,m;θ為波束傾角,(°)。
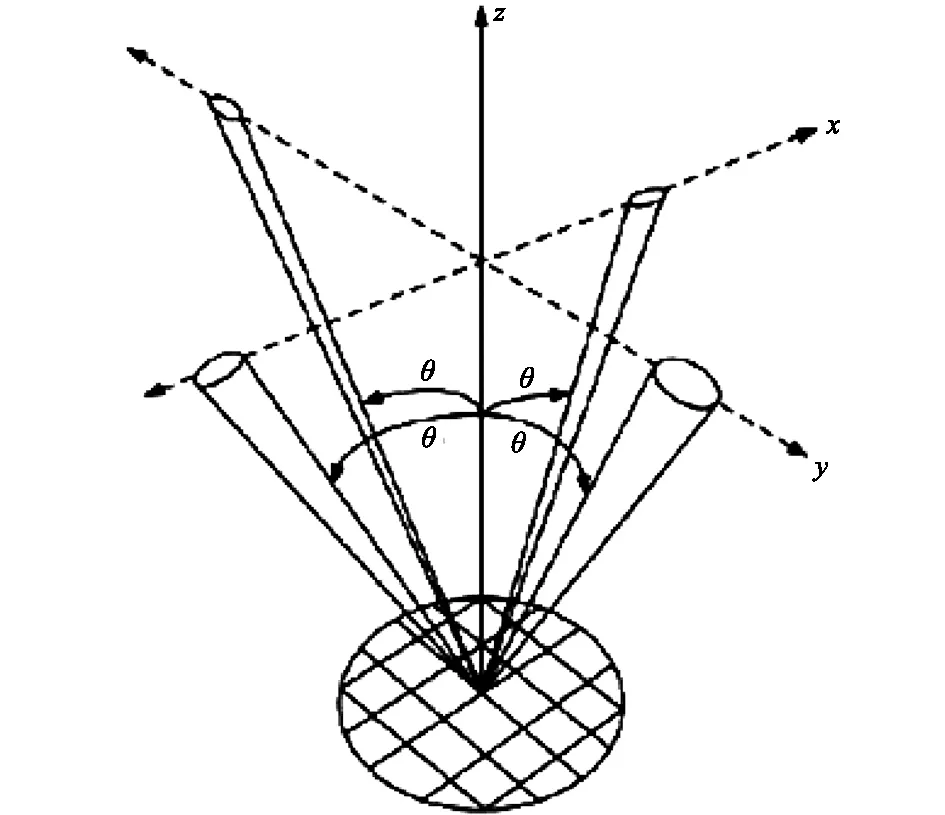
圖1 ADCP工作原理示意
所謂相控陣技術是利用波束形成的一種特殊情況,即當d=λ/2,且θ=30°時,由該式描述的相位控制量,只在 0°、90°、180°、270°這4個數據之間變化(因此相控陣上千個陣元中相位獨立的換能器為數并不多)。相控陣的優點是體積比常見的ADCP聲陣要小得多,其直徑只相當于常見的ADCP聲學換能器陣中一個換能器的直徑。在相同尺寸條件下,相控陣式ADCP的工作頻率可以更低,從而能使其測量深度更深。
3 應用實例及成果分析
3.1卡揚河基本情況
卡揚河位于印度尼西亞北加里曼丹省境內,全長約450 km。卡揚一級水電站是卡揚河最下游的一個梯級,壩址位于北加里曼丹省的卡揚河中游河段,Long Bia村上游約7.5 km處。所選水文控制斷面位于壩址下游3 km處,上游順直長度約500 m,水流基本穩定。河道形狀為“U”型,洪水期水面寬約180 m,常水位河寬約140 m。左岸樹木覆蓋茂盛,坡度較大;右岸坡度較緩,樹木較左岸稀少。斷面主河槽為卵礫質河床。
卡揚河流域無水文測站,為率定卡揚河水位-流量關系,需對卡揚河開展流量測驗。由于纜道測流基礎設施建設耗時較長,流速儀法施測時,測船需拋錨定位,存在一定的安全隱患。為此,選擇瑞智型相控陣ADCP配合水上交通船施測流量。
3.2儀器配置
瑞智型相控陣ADCP硬件主要包括ADCP主機、三體船、通訊設備(有線和無線模式)、測流軟件和筆記本電腦,外接設備包括GPS和GPS羅經。其中,通訊設備主要包含3種方式,即“Y”型電纜線直連、藍牙連接和電臺連接,藍牙連接模式信號可以傳輸30 m范圍內,通過電臺模式,信號可以在600 m范圍內傳輸。
結合卡揚河實際情況,此次流量測驗主要采用當地水上交通木船作為三體船動力,外接GPS(星站差分GPS)結合內置羅經測量流速,通訊方式選用藍牙模式。
3.3參數設置
瑞智型相控陣ADCP突破了以往ADCP必須由用戶根據現場情況設置作業參數的局限,采用智能化、自動化設計理念,使用戶幾乎無需做任何設置就可以進行流量測量。 在橫渡時,儀器會自動根據水深、流速大小情況切換測驗模式,保證測驗精度。唯一需要手動輸入的兩個參數分別為儀器入水深和岸邊流量插補信號個數。
3.4流量成果分析
2015年6月1日~8月8日在卡揚河利用瑞智型相控陣ADCP施測流量36次,最大流量4 008 m3/s,最小流量325 m3/s,并對底跟蹤(BTM)模式和GPS模式下的流量值分別進行了誤差計算,驗證了流量測驗值的穩定性,詳見表1。進行流量測驗時,測船進行4個單次測驗(2個往返),往返誤差控制在±5%范圍內,當某一個單次流量值超出誤差范圍時,補測該測次。
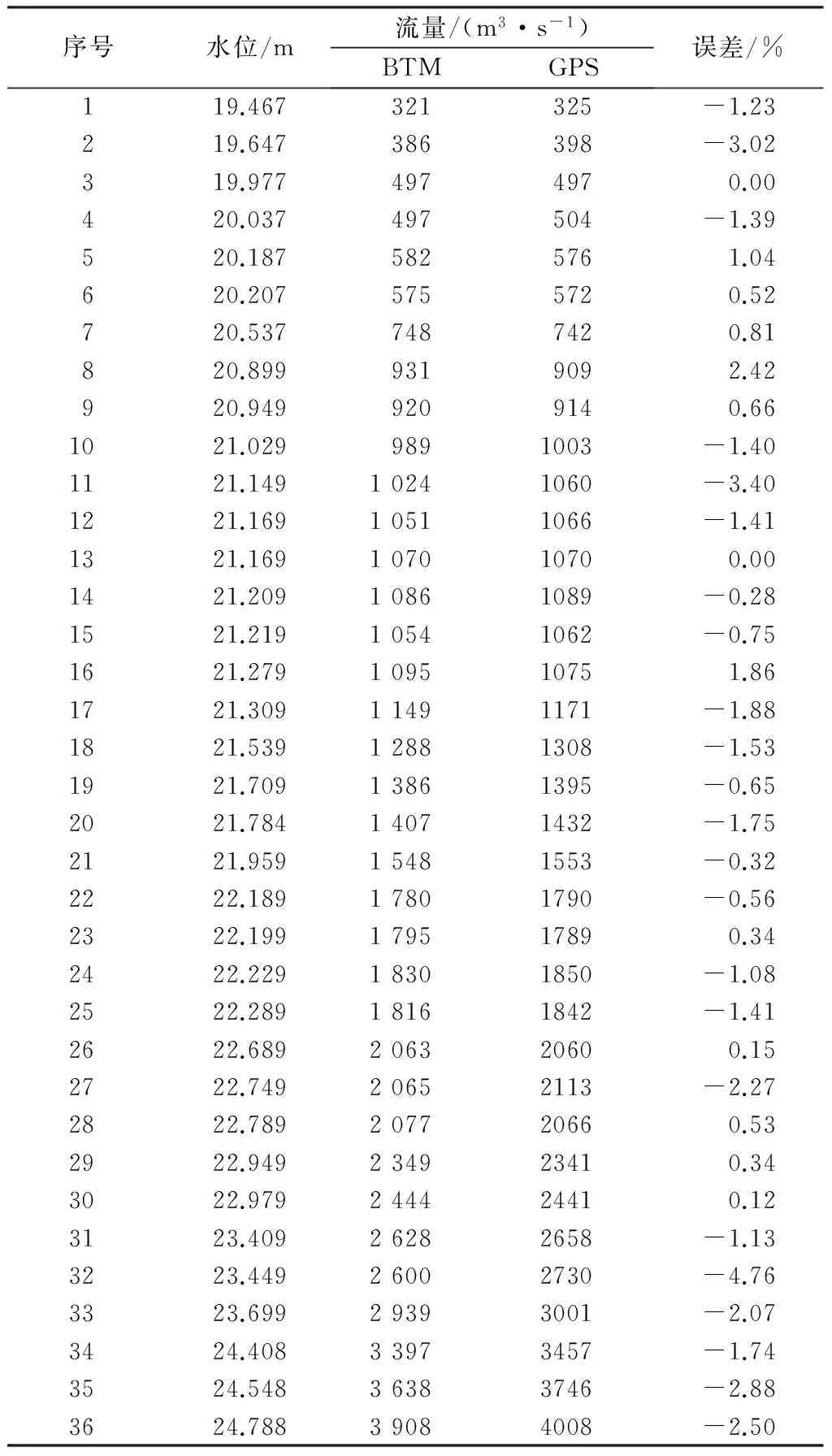
表1 卡揚河實測流量成果匯總
由表1可以看出,36個測次的GPS和BTM模式下的流量誤差全部在±5%范圍以內,水位相同或者接近時,流量值基本相同。原因在于:①卡揚河屬于槽蓄型河流,經過分析驗證,水位-流量關系是比較穩定的單一線,水位和流量是一一對應的單值關系;②相控陣ADCP測驗偶然誤差小,測驗成果可靠。
4 應用注意事項
(1) 測驗時,控制好船速,確保測船平均速度小于水流流速,最好能沿著斷面線橫渡。
(2) 使用木質測船施測時,可以不用外接GPS羅經,但是使用3~5次后,要及時校準內置羅經。
(3) 數據通訊方式有3種,根據不同情況選擇通訊方式,一般情況下,藍牙模式比較適用。
(4) 每次使用前后,都要涂抹硅膠,確保儀器密封不透水。
5 結 語
瑞智型相控陣ADCP具有體積小、精度高、安裝使用方便快捷等優點,能適用不同水深和水流條件,具有廣闊的應用前景。通過在長江、洞庭湖等大江大湖上的比測,驗證了該儀器的適用性。通過在印度尼西亞卡揚河的應用表明,特別是在類似該河流域,即水面寬度不寬、水深較大的情況下,瑞智型相控陣ADCP也具有較好的適用性。
參考文獻:
[1]田淳,劉少華.聲學多普勒測流原理及其應用[M].鄭州:黃河水利出版社,2003.
[2]張道平.多普勒測流技術的現狀和發展[C]//99浙、魯、津聲學技術交流會論文集.北京:海洋出版社,1999.
[3]SL337—200 聲學多普勒流量測驗規范[S].
[4]韋立新,蔣建平,曾貫中.基于ADCP實時指標流速的感潮段斷面流量計算[J].人民長江,2016,47(2):27-29.
(編輯:朱曉紅)
收稿日期:2016-05-15
作者簡介:羅興,男,長江水利委員會水文局長江中游水文水資源勘測局,工程師.
文章編號:1006-0081(2016)07-0001-03
中圖法分類號:P332.4
文獻標志碼:A