基于無人機技術的水質監測采樣裝置
2016-07-29 08:28:47劉國洋魏茂源
電子測試 2016年8期
關鍵詞:無人機
劉國洋,王 宇,魏茂源,李 楠
(山東科技大學,266510)
?
基于無人機技術的水質監測采樣裝置
劉國洋,王 宇,魏茂源,李 楠
(山東科技大學,266510)
摘要:為提高水質監測的效率、減少人力勞動和能源的浪費,提出了基于無人機技術的水樣采集、水質監測裝置,將現場通過水泵采樣的數據通過無人機上搭載的STM32微處理器進行處理后用GPRS網絡發送至服務器端,地面控制端通過PC機上的上位機進行數據的接收和無人機的控制。實驗表明,該裝置可高效地進行實時水質監測。
關鍵詞:無人機;水質監測;STM32F103;GPRS
0 引言
近年來,受人類活動的影響,水資源污染越來越嚴重,近半數水資源收到嚴重污染。目前我國水質監測主要依靠人工監測和無人船監測,人工監測需要實地采樣,周期很長且需要消耗大量人力物力;目前最新出現的水質監測船也有一定缺陷,如在水面收到嚴重污染或有大量漂浮物是無人船會受到阻礙和污染。本文設計了基于無人機技術的水質監測采樣裝置,較好的彌補了上述缺陷,且有助于水質監理的高效化和精確化,提高了水質監測的信息化水平,并最終達到水質監理監測自動化、信息化和現代化的目的。
1 擬解決的關鍵問題
本基于無人機技術的水質監測采樣裝置擬解決的關鍵問題有:
(1)地形復雜、險要、地處偏僻的水樣采集點代替傳統索道采集方式,提高采集效率與人員操作危險性;(2)開拓包含有害、有毒、放射性污染物的水域與地域人員無法涉足的采樣空白領域,增強突發事件處置時效性;(3)需要頻繁采樣的水域,或在水域中央采樣的水域,降低單次采樣成本,減少人員、車輛與船舶的經濟開支。
2 總體設計方案
2.1無人機主體設計
本無人機主要采用市面上常見的四、六旋翼無人機,利用多旋翼無人機飛行穩定,易于操作,動作靈活等優勢。無人機采用11.2V、3300mAh鋰電池作為系統的能源,因飛行環境與水樣容積不同,飛行時間在25~40min之間。本設計無人機采用自組裝四旋翼無人機,采用NAZA LITE飛控,2212電機,30A電調,GPS模塊,1045和8045漿各兩片,可以實現飛行時負載1kg的重物。
2.2水樣采集裝置設計
水樣采集部分主要包含有上蓋板、下蓋板、連桿、支柱、法蘭盤、萬向節、橡膠卡、舵機、水泵、導管、浮漂與濾網組成。法蘭盤安裝在無人機底部,其作用是將連桿與萬向節連接,萬向節的作用為避免水樣瓶采樣的先后順序導致水樣采集部分側翻,并將不平衡的扭矩傳遞到無人機上通過飛控的感應控制螺旋槳維持平衡。萬向節下端連接有連桿,連桿與上蓋板剛性連接,上下蓋板通過支柱剛性連接,下蓋板中心有圓孔方便導管下放。下蓋板平均分布有四個橡膠卡,用于固定采樣瓶,其優點是能夠快速更換采樣瓶,且能夠兼容多口徑、多容量的采樣瓶。上蓋板安裝有一舵機,電機外殼剛性連接在上蓋板上,其輸出軸安裝有小面積圓盤,圓盤上方固定有一水泵,水泵的出水口安裝有折彎的導管,將水樣輸送至采樣瓶中,其進水口連接有柔性軟導管,延伸至無人機懸停水域水面以下,柔性導管末端安裝有濾網,濾網上方安裝有可調節的浮漂,用于限定采集水樣的深度。
2.3控制及數據傳輸系統設計
(1)通過富斯i6控制器來發送信號來控制無人機的飛行,采用射頻發送,能控制6個通道,距離超遠,可達1000米,飛控中包含的GPS模塊主要實現無人機的懸停,定高等操作;
(2)基于STM32微處理器,通過識別遙控器接收器未使用的第五或第六通道發出的PWM波來代替開關量。當識別出PWM波占空比大于一定百分比時便觸發采集水樣的操作。單片機引腳發送信號給三極管經過電流放大后接在繼電器上以控制水泵的開關。
(3)通過控制STM32發出的PWM占空比來調節舵機的角度,實現了每觸發一次開關量便在接下來的十秒內分別執行兩次順時針旋轉45度的指令。
(4)傳感器對已采樣的水樣進行檢測,本例中僅對水樣溫度進行了檢測,后續可加入更多傳感器。此功能用到的模塊有SIM900A模塊,STM32F103,DS1820溫度傳感器。硬件框圖如圖1
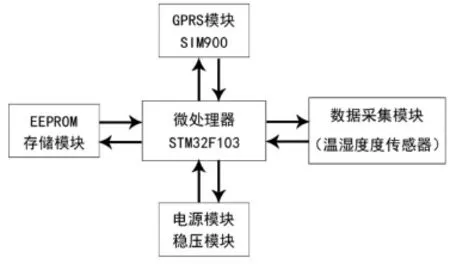
圖1
當裝置開始工作時,DS18B20將原始數據通過串行口發送至STM32進行處理,每次測量的時間和溫度數據會存至外部EEPROM以免丟失。SIM900的GPRS模塊與STM32之間的通信通過串行口發送AT指令完成,通過AT指令對SIM900進行初始化,配置參數,繼而通過AT指令控制GPRSModem與服務器進行連接,實現透明傳輸,將數據傳送至服務器。
3 作業流程
具體作業過程如下:
(1)規劃作業路徑
可以根據視頻傳輸的圖像加之肉眼視覺作為參考依據飛行,或者采用衛星定位進行直達定點飛行,亦可在固定取水電點安置信標,方便無人機進行航行至水體上方后進行懸停。
(2)采集第一次水樣
懸停后舵機工作將出水口對準采樣瓶口,水泵開始工作,一段時間后停止。此時瓶中傳感器對水樣進行檢測并通過STM32處理器進行分析,將原始數據通過GPRS傳輸至地面控制端。無人機航行至下一采樣地點并懸停在水域上方。
(3)采集非首次水樣
采集非首次水樣時,為保證水樣品質均要對管路用待采樣水體稀釋清洗,兩舵機協調旋轉出水口至兩個采樣瓶之間,啟動水泵,稀釋清洗完成后關閉水泵,步進電機轉動使得出水口對準采樣瓶,后再次循環步驟2中的過程。
(4)返航
按照要求完成所有采樣瓶的采樣工作后,無人機返航。
(5)二次出發
快速更換潔凈的采樣瓶與電池后無人機將再次出發,循環上述的過程。
4 控制端軟件設計
地面控制端上位機用可視化強,代碼較為簡單的VB設計,上位機的功能主要是從指定服務器獲取數據并處理顯示。在測試中,無人機獲取的數據被傳送到指定服務器,由服務器分析后存儲在一個指定文檔中,地面控制端的上位機只需定時讀取和修改這個文檔中的信息即可實現數據的接收和對無人機的控制。軟件界面如圖2
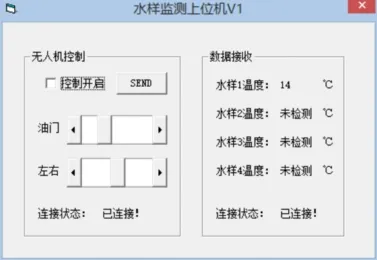
圖2
5 結語
本文設計了一款基于無人機技術的水質監測采樣裝置,通過STM32F103與SIM900A的GPRS模塊分析和傳輸數據,將帶有水泵的小型化的采樣和分析處理裝置與目前極具發展前途的無人機相結合,具有采樣便捷、實時監測、無線控制、多點采樣等特點。實現了在惡劣環境下的水質采樣,實時分析監測數據的功能。極大的降低了水質監測的成本,為水質監測的發展開辟出一條新的道路。
參考文獻
[1]劉亮,王擊,楊澤.基于ARM Cortex-M3和Internet的實時數據采集系統設計[J].2011(11).
[2] 周啟星.環境基準研究與環境標準制定進展及展望 [J]. 生態與農村環境學 報, 2010, 26(1):1~8.
[3]楊明智,王敏.四旋翼衛星飛行器控制系統設計[J].計算機測量與控制.2008(16).485-490
[4]單海燕.四旋翼無人直升機飛行控制技術研究[D].南京航空航天大學.2008
作者簡介
劉國洋(1995.04- ),男,山東省青島人,漢族,本科,研究方向:測控技術與儀器
王宇(1993.10- ),男,山東省濰坊人,漢族,本科,研究方向:機械設計制造及其自動化
魏茂源(1995.01- ),男,山東省東營人,漢族,本科,研究方向:材料成型及控制工程
李楠(1996.01- ),女,山西省臨汾人,漢族,本科,研究方向:測控技術與儀器
Water sampling and quality monitoring device based on UAV technology
Liu Guoyang,Wang Yu,Wei Maoyuan,Li Nan
(Shandong University of Science and Technology,266510)
Abstract:In order to improve water quality monitoring efficiency and avoid wasting labor and energy resources,a water sampling and quality monitoring device is designed on basis of UAV technology. Statistics collected from the water-pump will be processed by the STM32 microprocessor in the UAV and then the results will be sent to the service terminal through GPRS network. The upper computer of the control terminal on the ground will receive the processed results and control the UAV in the meanwhile. Through experiments, it can be proved that the device can efficiently perform real-time water quality monitoring.
Keywords:UAV;water quality monitoring;STM32F103;GPRS
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
