刮板輸送機用可控啟動傳輸裝置控制系統仿真研究
2016-07-19 07:09:24王亞濱廉自生崔紅偉
工礦自動化 2016年7期
王亞濱, 廉自生, 崔紅偉
(1.太原理工大學 機械工程學院, 山西 太原 030024;2.煤礦綜采裝備山西省重點實驗室, 山西 太原 030024)
?
刮板輸送機用可控啟動傳輸裝置控制系統仿真研究
王亞濱1,2,廉自生1,2,崔紅偉1,2
(1.太原理工大學 機械工程學院, 山西 太原030024;2.煤礦綜采裝備山西省重點實驗室, 山西 太原030024)
摘要:分析了刮板輸送機可控啟動傳輸裝置啟動特性和電液伺服控制特性,介紹了可控啟動傳輸裝置及其控制系統的組成和工作原理。基于AMESim仿真軟件,建立了電動機模型、可控啟動傳輸裝置模型、刮板輸送機模型、轉速與壓力兩級負反饋PID閉環控制系統模型,對刮板輸送機正常軟啟動工況以及平穩運行階段負載突變工況進行了仿真分析。仿真結果表明,通過PID整定的電液伺服閉環控制系統滿足了刮板輸送機的軟啟動和動態特性要求。
關鍵詞:刮板輸送機; 可控啟動傳輸裝置; 電液伺服控制; PID控制
網絡出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160705.1459.010.html
0引言
隨著煤礦綜采工作面機械化程度的提高,刮板輸送機軟啟動技術得到了廣泛應用。刮板輸送機常采用的軟啟動方式包括閥控充液式液力耦合器軟啟動、變頻啟動、可控啟動傳輸裝置(Controlled Starting Transmission,CST)軟啟動等[1-3]。CST主要用于帶式輸送機和刮板輸送機的軟啟動,具有啟動電流小、啟動速度平穩、對電網沖擊小等優點。CST通過一套電液伺服控制系統控制伺服閥的輸出壓力,從而控制輸送機的啟動過程。電液伺服控制系統具有抗負載沖擊能力強、功率密度大、響應速度快等特點[4]。
何鴻志[5]采用串級調節速度控制方法分析了正常狀態下CST實際運行曲線;侯旭瑋[6]研究了CST的啟動特性,提出使用PID閉環控制優化系統控制性能;張述坤等[7]采用試湊法確定了帶式輸送機用CST控制系統的PID參數。現有研究多以帶式輸送機為負載,缺少以刮板輸送機為負載并綜合考慮電動機、CST、刮板輸送機特性的相關研究。本文通過分析CST控制刮板輸送機的過程,利用AMESim仿真軟件建立了電動機、CST、刮板輸送機及轉速與壓力2級負反饋PID閉環控制系統模型,對刮板輸送機正常軟啟動及平穩運行階段負載突變2種工況進行了仿真分析。
1CST及其控制系統組成
1.1CST組成及工作原理
CST是一種多級齒輪減速器,多用于礦山輸送機的驅動,能保證大慣性負載的平滑啟動。CST主要由齒輪傳動系統、液黏離合器、液壓伺服控制系統、潤滑冷卻系統、傳感器與數據采集系統組成,如圖1所示。
CST正常工作時,高壓油液經徑向柱塞泵、過濾器、伺服閥作用于伺服油缸,從而控制施加于液黏離合器上的壓力,起到控制離合器輸出轉矩的作用。CST液壓伺服控制系統如圖2所示。
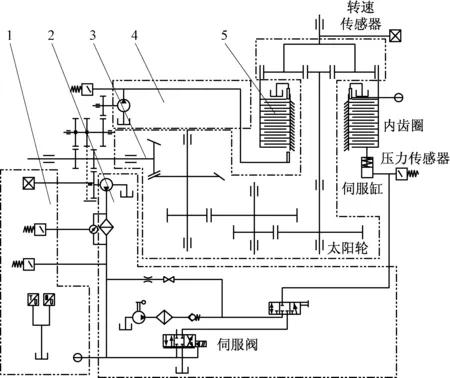
1-傳感器與數據采集系統; 2-液壓伺服控制系統;
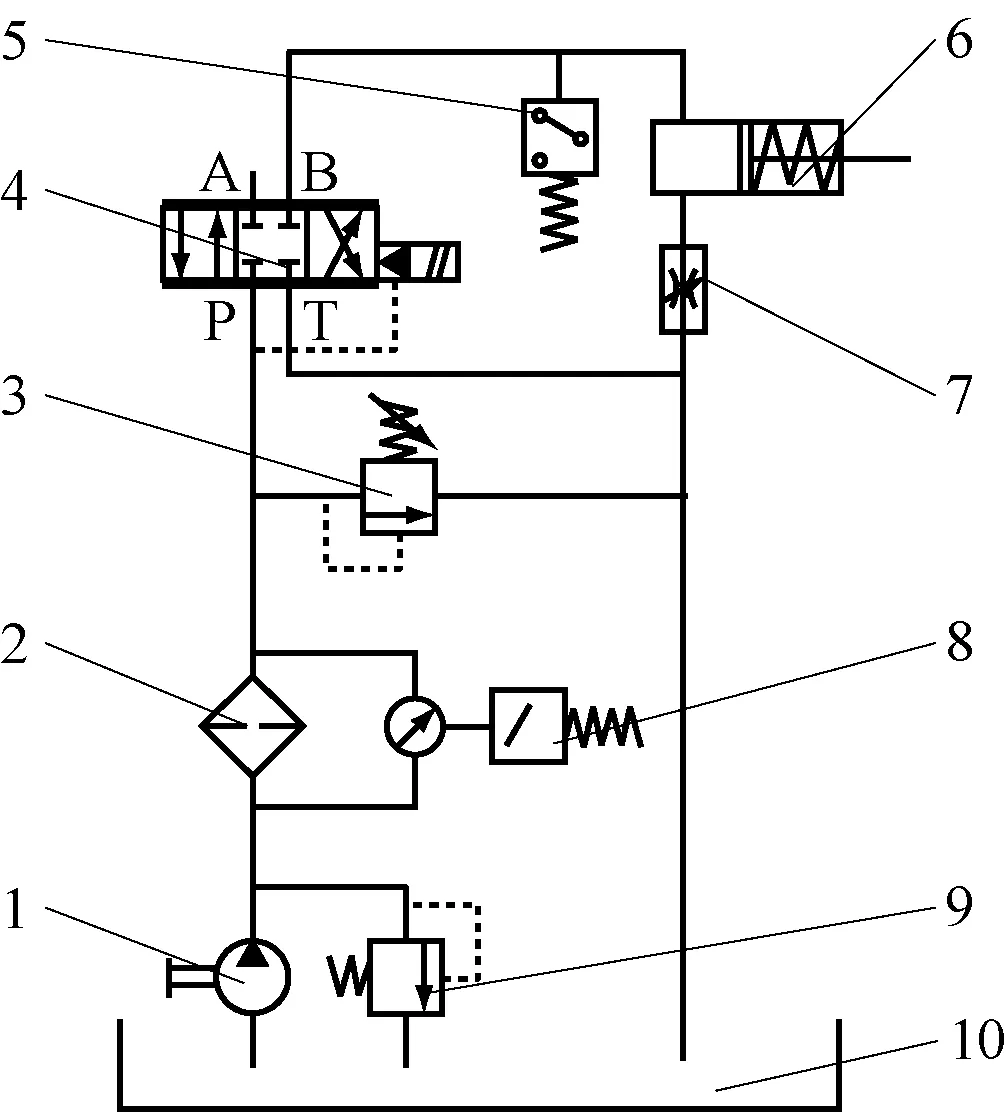
1-徑向柱塞泵; 2-過濾器; 3-安全閥; 4-伺服閥;
1.2CST控制系統組成
CST配置有多種傳感器進行系統實時狀態監測,包括輸入轉速傳感器、輸出轉速傳感器、離合器壓力傳感器、壓差傳感器、離合器溫度傳感器、高壓油溫度傳感器等。其中,正常工作時,對刮板輸送機啟動控制起調節作用的是輸出轉速傳感器與離合器壓力傳感器,它們分別反饋CST輸出轉速信號和伺服閥輸出壓力信號,構成了控制系統轉速與壓力控制閉環的反饋環節。其余傳感器起監測報警作用,當測量值出現異常時,反饋停機信號,直接使離合器泄壓,從而保護減速器和電動機。CST正常工作時,其控制系統如圖3所示。
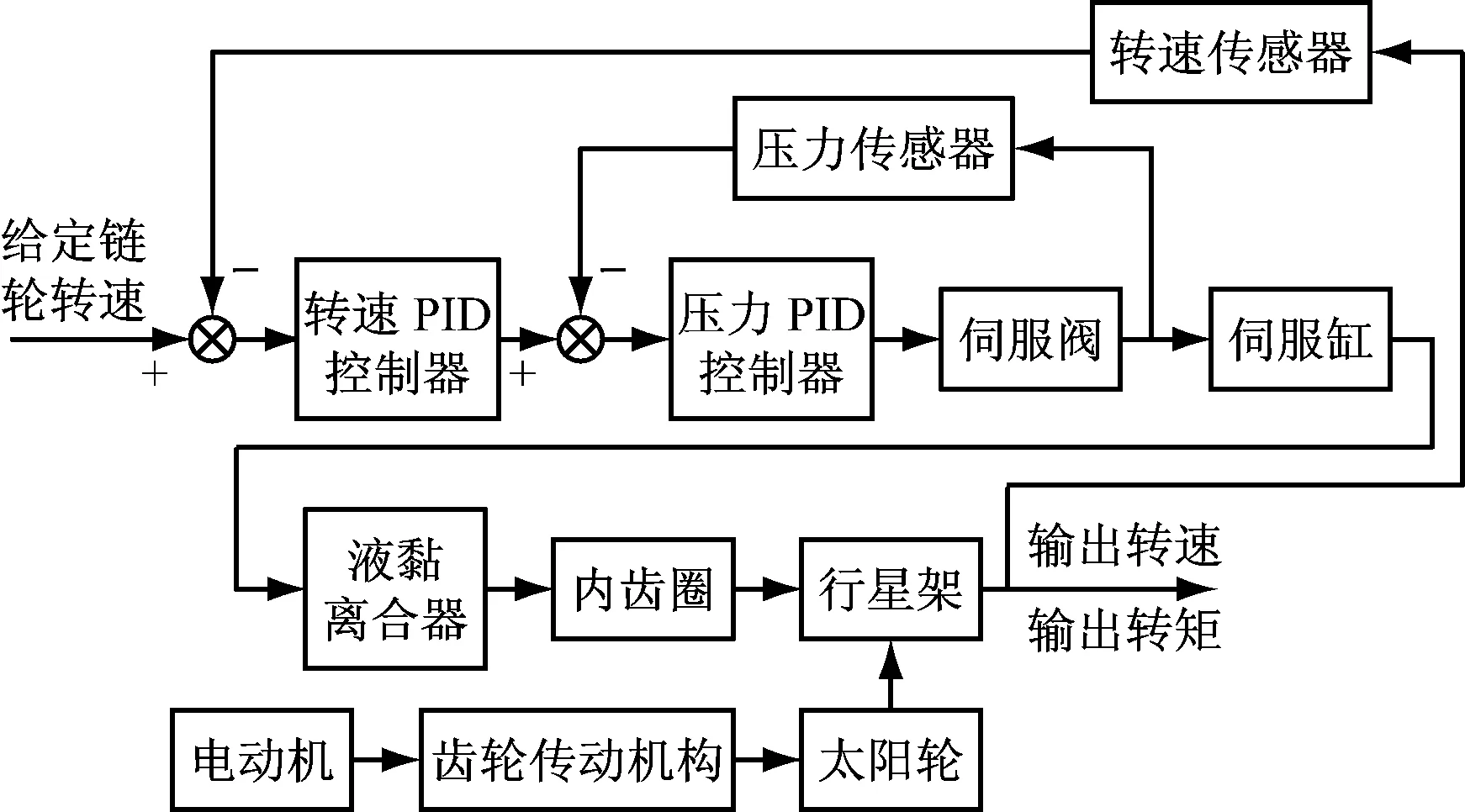
圖3 CST控制系統
2系統仿真模型
2.1電動機模型
礦用刮板輸送機CST所配套的電動機是三相鼠籠式異步電動機。液體黏性摩擦調速離合器位于異步電動機和負載之間,接收異步電動機傳來的動力,驅動負載。通常根據負載的軸功率和轉速要求來選定異步電動機,所選電動機額定功率要大于負載的軸功率(即負載的輸入功率),以保證一定的功率儲備。
根據異步電動機特性,電動機的轉子轉速為
(1)
式中:s為異步電動機的轉差率,s=0.02;n1為電動機旋轉磁場轉速,r/min;f1為異步電動機電流的頻率,f1=50 Hz;p為異步電動機磁極對數,p=2。
2.2CST主機模型
CST主機模型包括齒輪減速器模型、伺服閥模型和液黏離合器模型。
(1) 齒輪減速器模型。CST采用4級齒輪減速機構。其中,第1級為圓錐齒輪減速機構,速比為31∶12;第2,3級均為斜齒圓柱齒輪減速機構,速比分別為67∶61,61∶28;第4級為行星減速機構,行星排特征參數為4.4。
(2) 伺服閥模型。CST液壓控制系統選用D631伺服控制閥,該伺服閥由先導級、反饋機構和主級構成。先導級獲得來自控制器的輸入指令信號,提供主級閥芯移動所需要的液壓力。反饋機構通過反饋彈簧,獲得主級閥芯到先導級的實際位移。主級閥芯控制閥的輸出流量,并為先導級提供機械反饋。
(3) 液黏離合器模型。根據液黏離合器傳遞扭矩特性,多個摩擦副所能傳遞的摩擦轉矩應等于額定轉矩,則
(2)
式中:T為額定轉矩;n為摩擦副數目(摩擦表面對數),n=46;K為壓緊力遞減系數,K=0.77;f為動摩擦系數,f=0.14;F為摩擦面的壓緊力;R為環形摩擦面的外半徑,R=332 mm;r為環形摩擦面的內半徑,r=256 mm。
在主機輸出轉速尚未達到輸入轉速,即摩擦離合器動、靜摩擦片處于相對滑動狀態時,液體黏性摩擦離合器的工作機理是液體黏性傳動,即利用圓盤油膜傳遞轉矩。此時整個液體黏性摩擦調速離合器所能傳遞的轉矩為
(3)
式中:μ為油液的動力黏度,μ=0.184 8 Pa·s;ω1為主動摩擦片角速度,r/min;ω2為被動摩擦片角速度,r/min;δ為油膜厚度,mm。
由以上模型可知,液黏傳動摩擦調速離合器在由空載打滑到滿載抱死的過程中,離合器輸出轉矩與油膜厚度成反比例變化,如果綜合考慮溫度對油液屬性的影響,離合器輸出轉矩將隨輸入壓力信號的增加成非線性趨勢增長,直到離合器動靜摩擦片轉速差為零,輸出轉矩達到最大。
2.3刮板輸送機負載模型
刮板輸送機有載分支的基本運行阻力為
(4)
式中:q為刮板輸送機單位長度貨載質量,q=593 kg/m;c為物料在中部槽中移動的阻力系數,c=0.6;q0為刮板鏈條單位長度質量,q0=98 kg/m;c′為刮板鏈條在有載分支中部槽中移動時的阻力系數,c′=0.4;L為刮板輸送機設計長度,L=229.5 m;“±”根據刮板鏈條向上運輸時取“+”,反之取“-”。
刮板輸送機無載分支的基本運行阻力為
(5)
式中:c″為刮板鏈條在無載分支中部槽中移動時的阻力系數,c″=0.4。
刮板輸送機啟動時,負載由靜止到運動,其摩擦阻力會由靜摩擦轉變為動摩擦,摩擦阻力系數不同,因此,在啟動過程中,負載扭矩具有啟動非線性。在AMESim中,利用集中質量模型構建負載。
2.4系統仿真模型
CST控制系統核心元件為電液伺服閥,控制信號由多層閉環反饋系統提供。本文采用PID控制算法,并利用AMESim仿真軟件對CST控制系統進行全局建模,建立了電動機、CST、刮板輸送機及轉速與壓力兩級負反饋PID閉環控制系統模型,如圖4所示。
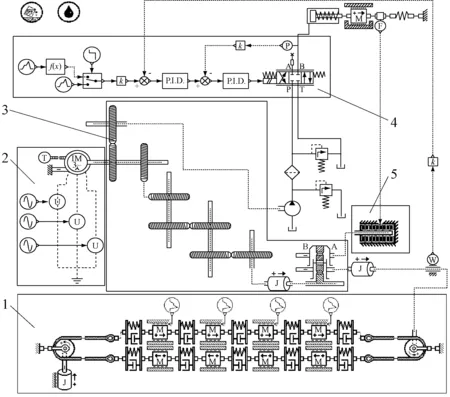
1-刮板輸送機負載模型; 2-電動機模型; 3-齒輪減速器模型;
3CST系統仿真分析
CST系統通過PID控制器將信號調整為伺服閥所能接收的電流信號,從而調整壓力。根據伺服閥的動態仿真特性,確定壓力反饋PID控制器比例增益為2,積分增益為0.01,微分增益為0。轉速反饋PID控制器的參數按照Ziegler-Nichols整定法計算得到初始值,然后利用模型仿真進行微調修正,得到比例增益為5.5,積分增益為4.75,微分增益為0.02。
3.1CST系統輸入信號
刮板輸送機啟動時,若直接啟動加速會產生較大的速度振動,為了減小這種由負載干摩擦阻力引起的振動,采用預啟動技術,加速階段按照S形曲線變化規律加速[8]。故給定仿真信號為刮板輸送機理想啟動曲線,如圖5所示。其中,T0段為電動機空載啟動階段,T1段為預啟動階段,T2段為加速啟動階段,T3段為穩定運行階段。
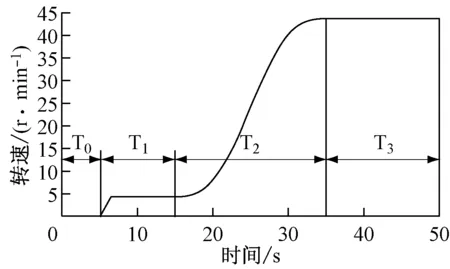
圖5 刮板輸送機理想啟動曲線
3.2正常軟啟動工況
給定系統輸入信號,設定仿真參數,在正常負載工況下對系統進行仿真分析,得到CST控制特性,如圖6所示。由圖6(a)可知,在預啟動完成后,實際鏈輪轉速完成了對給定信號的跟隨,說明此時刮板輸送機已克服負載阻力并完全啟動,從而在進入加速啟動階段后,輸出鏈輪轉速可以按照輸入的“S”曲線變化規律平穩加速。刮板輸送機完全啟動之前,負載速度始終低于給定速度,偏差信號使得轉速PID的輸出信號不斷增大,伺服閥壓力輸出信號相應增大(圖6(b)),CST輸出轉矩隨之增大,直到滿足負載啟動轉矩時,刮板輸送機完全跟隨啟動(圖6(c))。仿真結果表明,通過PID整定的電液伺服閉環控制系統的響應速度滿足工作需求。
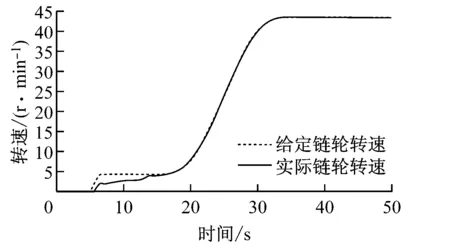
(a) 給定鏈輪轉速信號與實際輸出信號
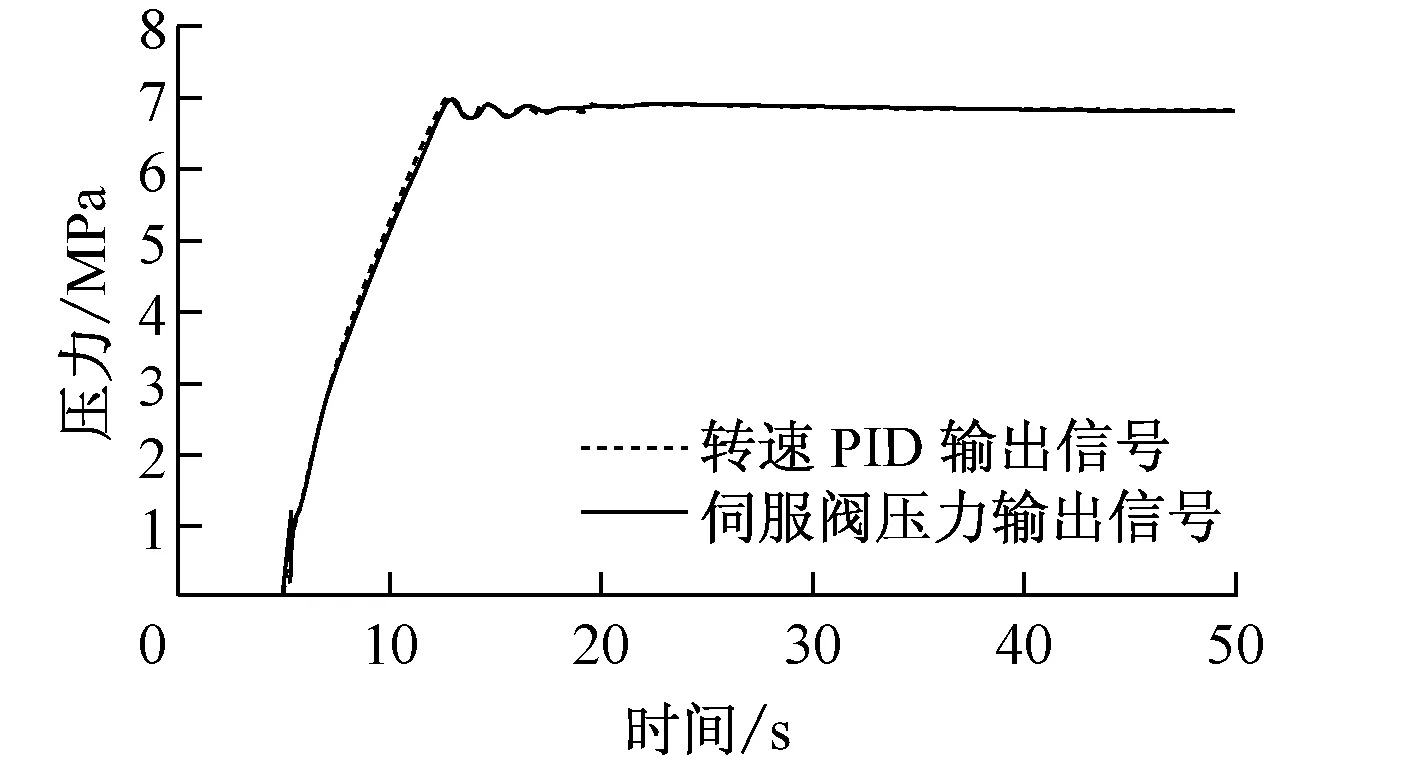
(b) 轉速PID輸出信號與伺服閥壓力輸出信號
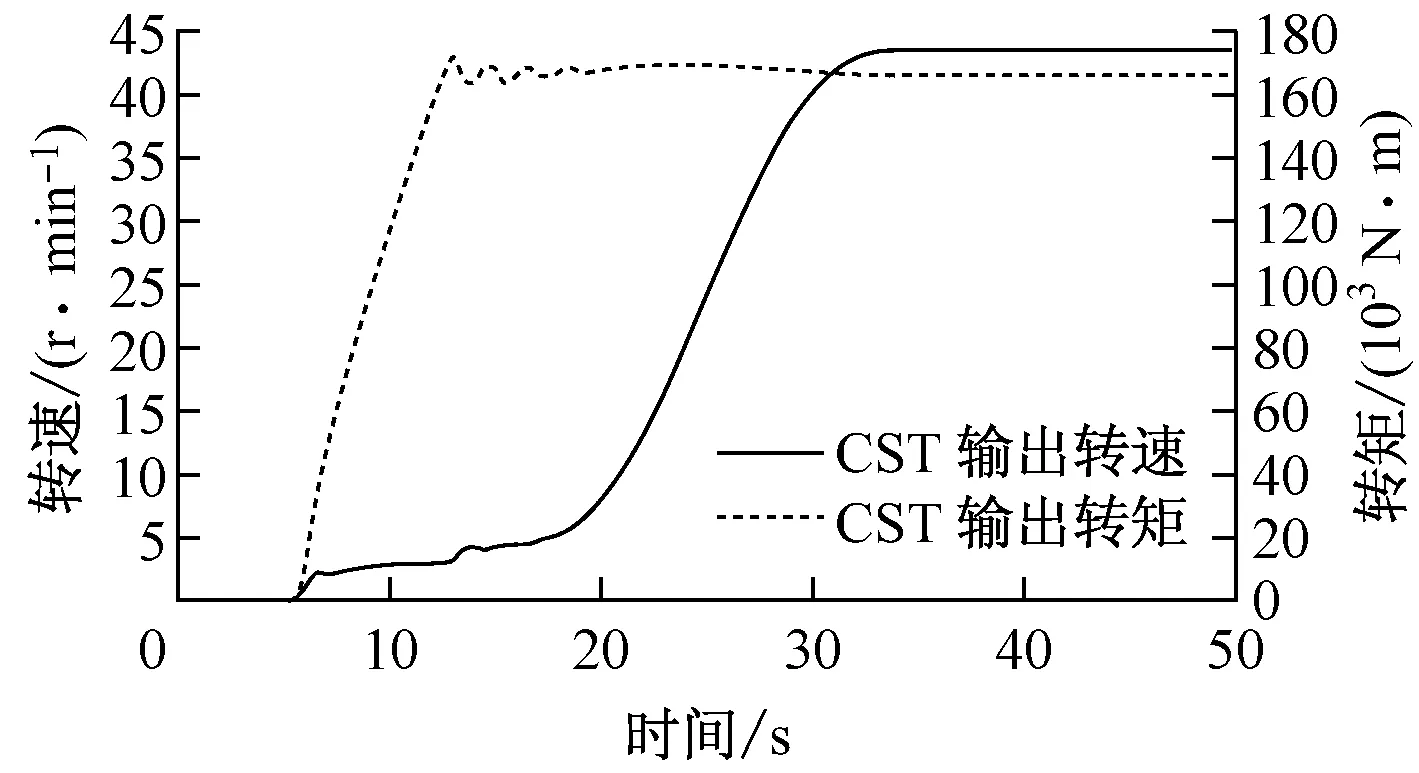
(c) CST輸出特性
3.3負載突變工況
當仿真運行到50 s時,刮板輸送機已平穩啟動,進入穩定運行階段,假定此時負載發生突變,由輕載變為重載,修改刮板輸送機模型仿真參數,并運行仿真,得到負載突變工況下CST控制特性,如圖7所示。由圖7可知,負載加大導致鏈輪處負載轉矩增加,大于CST輸出轉矩,液黏離合器打滑,輸出轉速下降(圖7(a)),轉速PID輸入偏差信號增大,輸出信號相應增大,從而導致壓力PID輸入偏差信號增大,輸出壓力控制信號增大,伺服閥壓力輸出相應增大(圖7(b)),使得離合器和CST輸出轉矩增大,直至與負載轉矩重新平衡(圖7(c))。整個調整過程持續時間約為10 s,10 s后系統重新達到穩態,滿足系統穩定性要求。
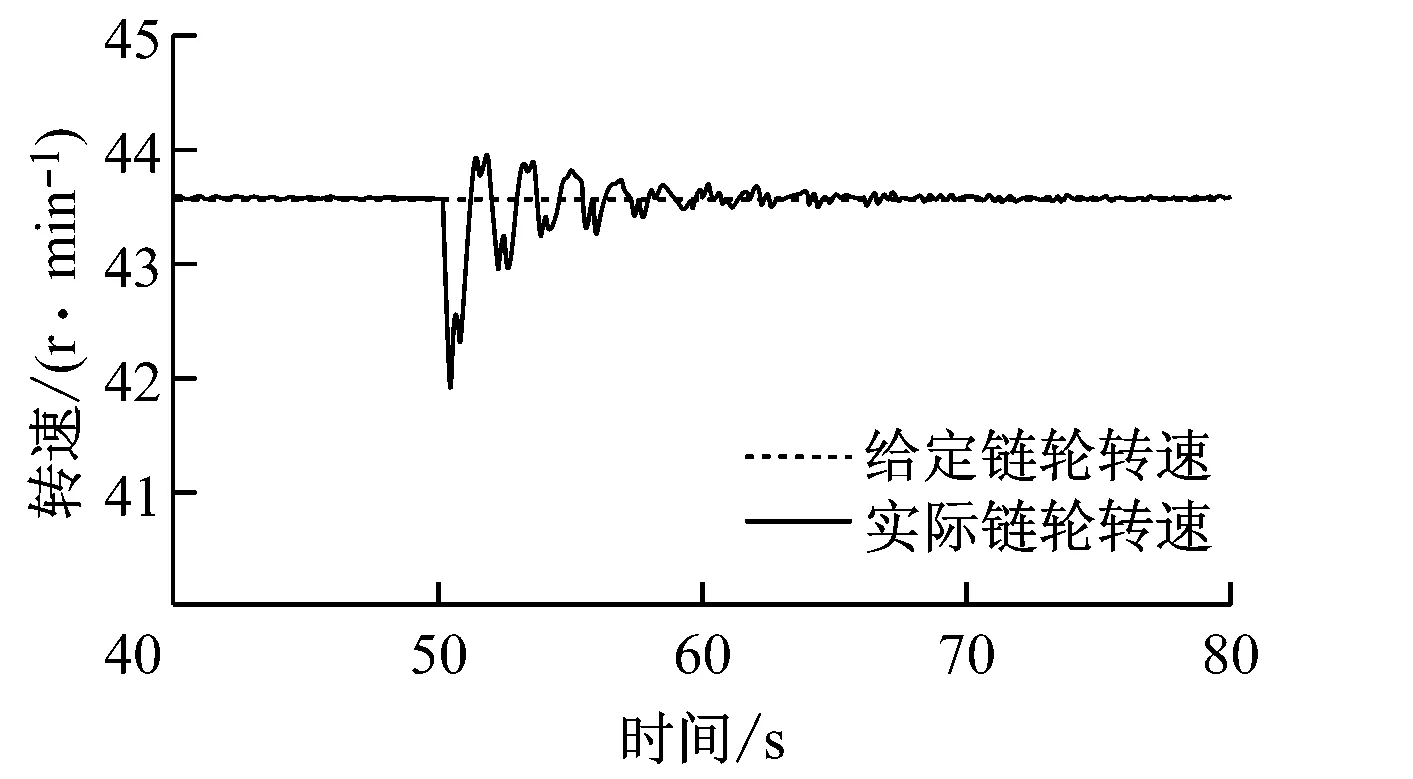
(a) 給定鏈輪轉速信號與實際輸出信號
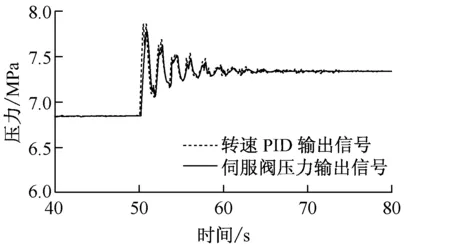
(b) 轉速PID輸出信號與伺服閥壓力輸出信號
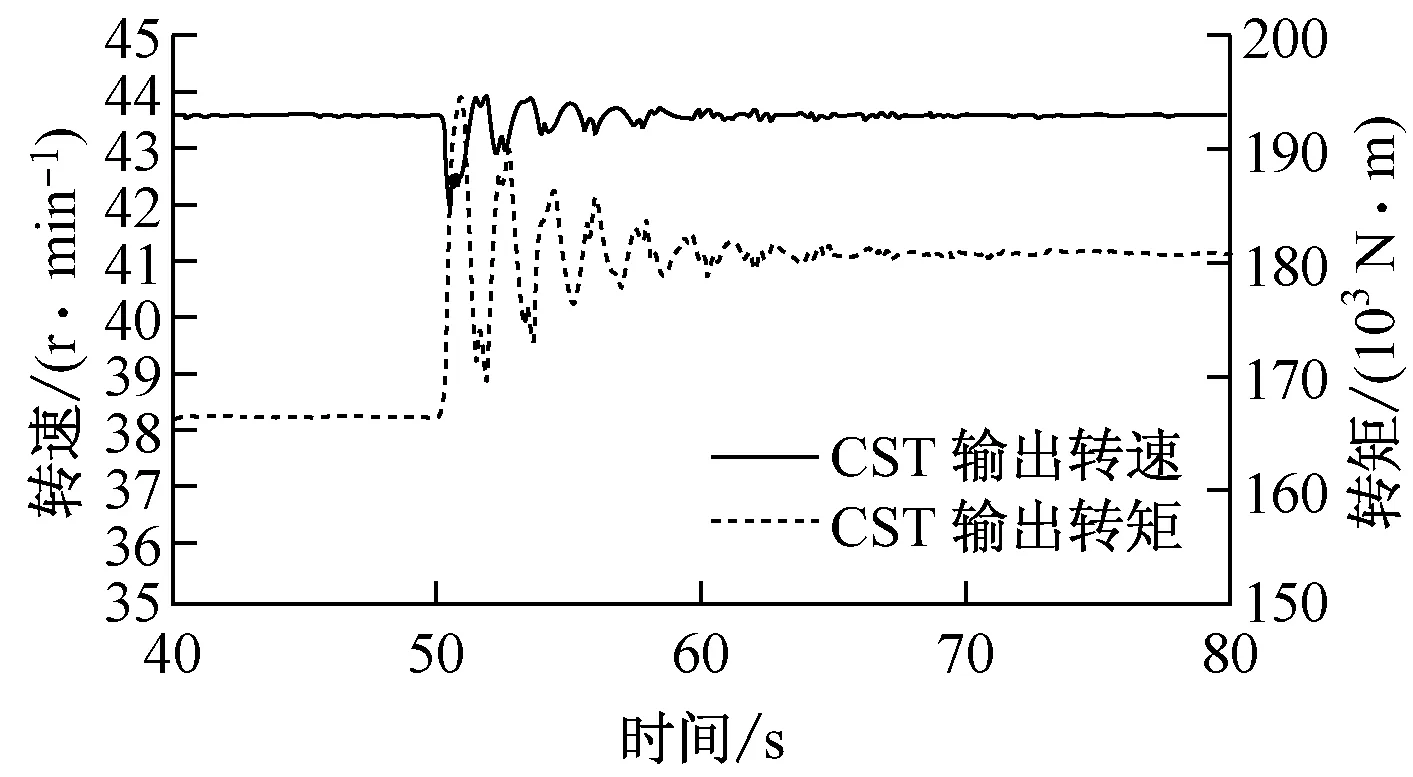
(c) CST輸出特性
4結語
利用AMESim仿真軟件對刮板輸送機CST轉速與壓力2級負反饋PID閉環控制系統進行建模與仿真,直觀反映出CST控制系統工作時的控制特性。仿真結果表明,在正常軟啟動和負載突變工況下,通過PID整定的電液伺服閉環控制系統均可平穩運行,且最終不存在穩態誤差,滿足刮板輸送機軟啟動和動態特性控制的穩定性要求。同時,仿真結果為CST軟啟動性能的預測和PID電液伺服控制系統的設計提供了理論依據。
參考文獻:
[1]張庚云,劉偉,王騰.大功率刮板輸送機軟啟動過程仿真研究[J].煤炭科學技術,2013,41(4):71-74.
[2]曹劍,趙學剛,張磊,等.淺析CST軟啟動裝置的日常維護[J].工礦自動化,2010,36(10):79-81.
[3]張庚云,劉偉.CST軟起動技術在大功率刮板輸送機上的應用[J].煤礦機械,2012,33(3):208-210.
[4]王軍政,趙江波,汪首坤.電液伺服技術的發展與展望[J].液壓與氣動,2014,14(5):1-12.
[5]何鴻志.基于PLC的可控起動傳輸裝置CST控制算法[J].煤礦機電,2011(2):91-93.
[6]侯旭瑋.基于粘性離合器的可控啟動傳輸系統(CST)啟動特性的研究[D].太原:太原理工大學,2011.
[7]張述坤,李素梅.帶式輸送機CST控制系統的仿真分析[J].煤礦機械,2013,34(8):97-99.
[8]毛君.刮板輸送機動力學行為分析與控制理論研究[D].阜新:遼寧工程技術大學,2006.
Simulation research on control system of CST for scraper conveyor
WANG Yabin1,2,LIAN Zisheng1,2,CUI Hongwei1,2
(1.College of Mechanical Engineering, Taiyuan University of Technology, Taiyuan 030024, China;2.Shanxi Key Laboratory of Fully Mechanized Coal Mining Equipment, Taiyuan 030024, China)
Abstract:Start characteristics and electro-hydraulic servo control characteristics of CST for scraper conveyor were analyzed, compositions and working principles of both CST and its control system were introduced. Based on AMESim software, simulation model that includes motor model, CST model, scraper conveyor model, two levels negative feedback PID closed-loop control system model of rotational speed and pressure were established. Two kinds of start working conditions of the scraper conveyor were simulated, including normal soft start condition and load mutation condition during smooth running stage. The simulation results indicate that the PID modified electro-hydraulic servo closed-loop control system can satisfy requirements of soft start functions and dynamic performances of scraper conveyor.
Key words:scraper conveyor; controlled starting transmission; electro-hydraulic servo control; PID control
文章編號:1671-251X(2016)07-0039-05
DOI:10.13272/j.issn.1671-251x.2016.07.010
收稿日期:2016-01-22;修回日期:2016-05-23;責任編輯:胡嫻。
基金項目:山西省煤基重點科技攻關項目(MJ2014-06)。
作者簡介:王亞濱(1991-),男,山西臨汾人,碩士研究生,主要研究方向為機電液一體化,E-mail:tylgwyb@163.com。
中圖分類號:TD634.2
文獻標志碼:A網絡出版時間:2016-07-05 14:59
王亞濱,廉自生,崔紅偉.刮板輸送機用可控啟動傳輸裝置控制系統仿真研究[J].工礦自動化,2016,42(7):39-43.
