探測機器人電氣系統設計
2016-07-19 07:21:57翟國棟蘇一新高培源
工礦自動化 2016年7期
翟國棟, 蘇一新, 高培源
(中國礦業大學(北京) 機電與信息工程學院, 北京 100083)
?
探測機器人電氣系統設計
翟國棟,蘇一新,高培源
(中國礦業大學(北京) 機電與信息工程學院, 北京100083)
摘要:為了提高探測機器人的智能化,設計了一種以ARM架構為核心的電氣系統。該系統采用2.4 GHz無線通信、電動機閉環控制、多自由度機械臂控制以及多傳感器信息融合等技術,實現了避障、越障、定位、通信、傳感器測量等功能;利用光伏效應和改進爬山法進行最大功率點追蹤,解決了探測機器人能耗問題。
關鍵詞:探測機器人; 電氣系統; 光伏發電; MPPT
網絡出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160705.1505.020.html
0引言
探測機器人是用于在危險區域與復雜地形執行目標物及環境探測任務的地面移動平臺[1],是現代傳感技術、檢測技術、人工智能、自動控制、機構學、信息技術及計算機技術等多學科、高新技術的結晶,不僅在空間、軍事、消防、采礦、林業、勘探等領域發揮著重要作用,而且與相關學科的發展也有很大關系,具有重要研究意義。
探測機器人主要依賴自身電氣硬件系統,配合相應軟件實現避障、越障、定位、通信、傳感器測量等功能。筆者設計了一種探測機器人電氣系統,并完成了樣機制作。
1探測機器人機械系統
探測機器人的機械構造決定了其運動性能的好壞,本文基于結構力學和動力學的相關理論,針對復雜未知的地形,設計了一種六輪搖臂懸架行走機構;經運動學分析,推導出了探測機器人在任意運動位置時質心域的計算公式;利用Matlab軟件進行了實體分析與優化,用Adams進行了動力學建模與仿真分析,驗證了優化結果。
探測機器人基本結構由中心車體和兩側的搖臂懸架2個部分組成[2],如圖1所示。機器人兩側的搖臂懸架能夠緊貼路面行走,運行平穩。機器人采用六輪獨立閉環驅動,驅動能力強,輪胎采用特殊材料避免迅速老化,通過六輪差速控制算法實現機構轉向。在機器人的正前方搭載了6自由度機械臂,以實現樣本采集工作,其結構如圖2所示。其中OR,D2,P2為機器人坐標系;l1—l5為各桿長;b為半個車體的寬度;β2為右搖臂繞車體轉動的角度;r為車輪半徑;α1,α2為D2的Z軸與前臂形成的2個夾角。
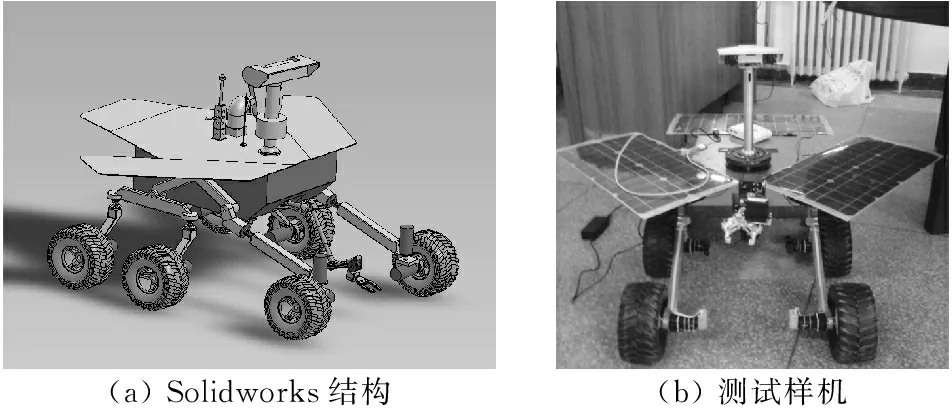
(a)Solidworks結構(b)測試樣機
圖1探測機器人Solidworks結構及測試樣機
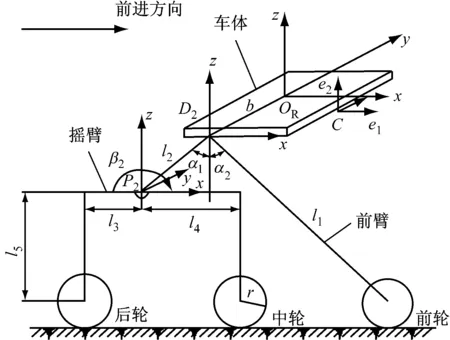
圖2 探測機器人結構
2探測機器人電氣系統
探測機器人電氣系統功能要求:為了安全和便于控制,要求機器人能夠精確閉環控制行進距離、行進速度,能準確自我定位和遠程實時通信;為了提高探測深度,要求機器人具備視覺采集、反饋控制與存儲,周圍環境信息采集存儲、樣本采集存儲等功能;為了有效行進與越障,要求機器人能提供較大的驅動電流;為了躲避無法逾越的障礙,要求機器人能夠具備CMOS圖像模式識別與紅外測距功能,以進行有效避障。
探測機器人電氣系統包括供電、核心控制、通信、驅動、測量傳感等子系統,結構如圖3所示。
2.1核心控制系統
核心控制系統運行主算法程序,負責多傳感器信息融合[5]、遠程通信、圖像采集與處理、機械臂及行走機構控制等。
CPU采用基于ARM7架構的32位處理芯片LPC2138,其帶有512 kB的高速Flash存儲器、47個GPIO、2個10位8路ADC、10位DAC、PWM通道和多個32位定時器,以及9個邊沿或電平觸發的外部中斷。該芯片還具有實時仿真和嵌入式跟蹤功能,寬范圍的串行通信接口和片內32 kB的SRAM,非常適用于通信網關、協議轉換等。
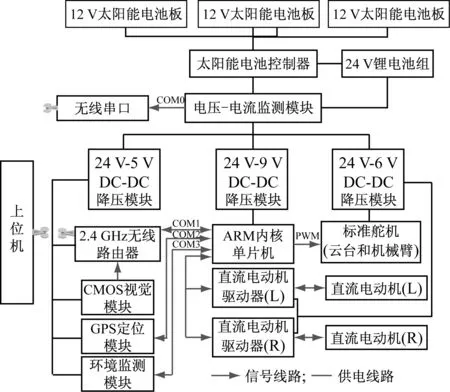
圖3 探測機器人電氣系統結構
2.2驅動系統
探測機器人采用六輪獨立閉環方式驅動,使用Faulhaber帶編碼器的空心杯減速直流電動機2342L012(額定電壓為12 V,輸出功率為17 W,輸出扭矩大,減速比為64∶1),并設計了雙直流電動機閉環驅動集成電路板,其核心處理器及外圍電路可以采集光電編碼器反饋信息,并進行PID運算、PID參數優化,可更準確地調整電動機轉動角度和轉速。
2.3測量傳感系統
探測機器人配有8個GP2D12紅外測距傳感器,同水平面均勻分布。該傳感器具有紅外信號發射端和接收端,發射端發射出紅外光線,光束傳播過程中遇到物體后被反射,回到傳感器接收端,利用發射與接收的時間差計算得到與物體的距離。其功耗小,體積小,抗干擾能力強,測量射程范圍為10~80 cm,可用于實現近距離物體的測距避障功能。
探測機器人配備了2個CMOS視覺模塊,搭配機械云臺進行全方位圖像采集與模式識別。雙目視覺技術模仿人雙目立體感知的方法[6],用2部視覺傳感器同時采集同一場景的圖像,利用計算機進行圖像閾值化、圖像增強處理,以及連通域提取等流程,實現彩色圖像中的多個障礙物識別[1],然后根據場景在不同攝像機成像中存在的視差,得到空間物體的深度信息,從而重建出場景的三維信息。
探測機器人還裝配了全球定位系統,用于采集緯度和經度,同時也能室外定位。陀螺儀用于室內位姿調整,BH1750FVI芯片的光照度傳感器、單總線DS18B20數字溫度傳感器、DHT11濕度傳感器等用于機器人周圍環境數據實時監測及存儲,最后,通過無線通信系統將傳感器信息上傳到上位機。
2.4通信系統
探測機器人一方面可以根據自身硬件進行自主決策,實現一定程度的自主導航、定位與控制;另一方面,還可以接收上位機的遠程操作控制指令[7]。
通信系統是實現機器人信息流傳遞的關鍵,機器人采用無線通信技術與上位機進行實時雙向通信,上位機發送控制信息,同時接收機器人各模塊數據與圖像信息。通信系統具體實現:在2.4 GHz無線路由器中寫入OpenWrt系統,并在該系統上運行Serial2net程序,進行核心處理器串口與網口的信息交換。
3探測機器人光伏發電系統
3.1光伏發電系統組成
光伏發電是利用由半導體材料制成的PN結電池結構所產生的光生伏特效應[3]。太陽能電池是為了滿足各種供電系統所需,直接把光能轉換成電能,并通過串聯和封裝保護后形成的大面積太陽能電池板。
探測機器人配有3塊可折疊式薄膜太陽能電池板,其光電轉換效率高,聚光條件下也適用。配合使用具有功率控制功能的MPPT(Maximum Power Point Tracking,最大功率點跟蹤)控制器和儲能鋰電池組,便組成了整個光伏發電系統,如圖4所示,該系統不受地域制約,安全、環保,且性能可靠。
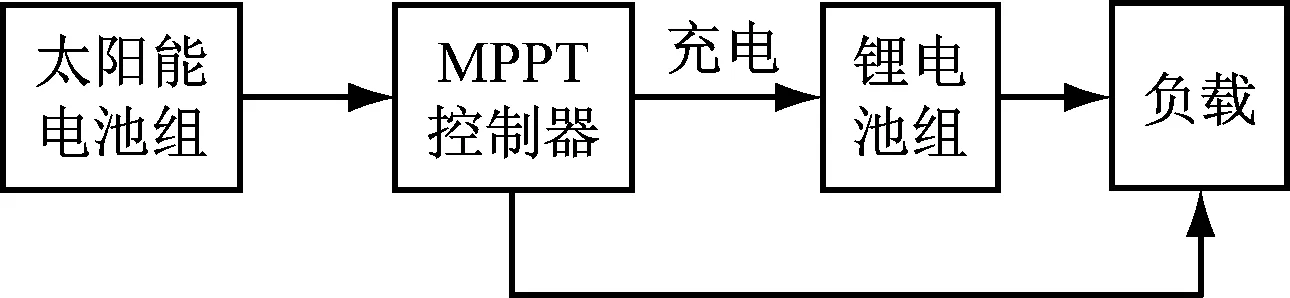
圖4 探測機器人光伏發電系統
根據光伏發電系統實際工作狀態,設計了3種工作模式:光照充足時,完全由光伏電池給負載供電,鋰電池只有儲能作用,鋰電池充滿時,應斷開充電線路,防止鋰電池過充;光照不足時,由光伏電池和鋰電池同時給負載提供電能;無光條件下,由鋰電池單獨供電,此時太陽能電池續航能力較弱。
3.2最大功率點跟蹤算法
光伏方陣的最優工作點稱為最大功率點,其值主要取決于電池板的工作溫度和當時的光照水平[4]。最大功率點跟蹤算法是指太陽能電池的最大功率點追蹤方法,在快速變化的天氣條件下,控制電池板盡量在最大功率點工作。MPPT控制器能夠實現電路中電壓、電流的監測,以及鋰電池的充、放電控制,不僅可防止鋰電池過充,延長鋰電池的壽命,還可根據負載需求,實現太陽能電池組件的主動控制及鋰電池的電能輸出。鋰電池充電時,太陽能電池的輸出電壓應大于鋰電池當前電壓,否則無法充電。

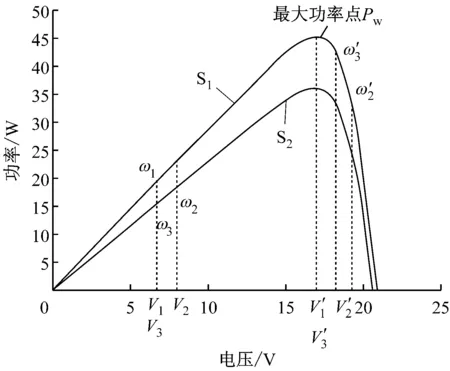
圖5 改進爬山法跟蹤原理
為了避免誤動作,加入對ω3的判斷作為輔助決策條件。當Δp′>0時,假設ω2<ω3,則證明功率變化是由光強影響的,應該繼續維持一開始工作狀態時的電壓值不變,否則,證明電池板在最大功率點的左側工作,需增加工作時的電壓;同理,當Δp′<0時,假設ω2>ω3,則應繼續保持原來的工作電壓不變,否則,有必要降低工作時的電壓。改進爬山法有效減少了爬山法跟蹤的誤動作,并能更好地跟蹤光照強度的快速變化,提高最大功率跟蹤效率,使跟蹤匹配因數更接近于1。跟蹤匹配因數越接近1,說明MPPT控制算法效果越好[4]。改進爬山法流程如圖6所示。
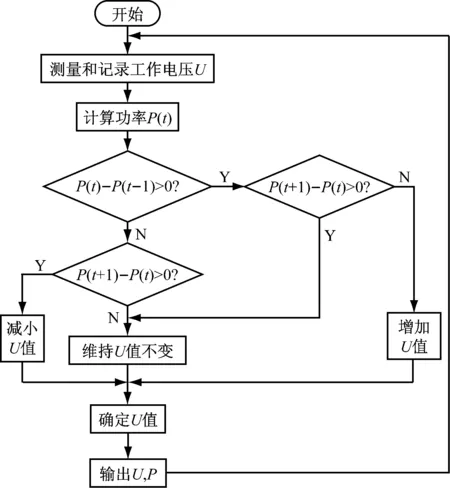
圖6 改進爬山法流程
4結語
探測機器人電氣系統以ARM7架構處理器為核心,并運用GPS、紅外傳感器、陀螺儀、視覺傳感器、環境探測傳感器等進行多傳感器信息融合,進而控制行走機構與機械臂等執行機構;選用改進的爬山法進行最大功率點追蹤,有效降低了爬山法跟蹤的誤動作,能更好地跟蹤光強的迅速變化,提升最大功率跟蹤的效率,解決了探測機器人的能耗問題。
參考文獻:
[1]鄭海華.基于視覺的平地探測機器人避障研究[D].長沙:中南大學,2014.
[2]趙建偉,高培源,陳占營,等. 六輪月球探測機器人質心域分析及搖臂優化[J].兵工自動化,2015,34(5):66-69.
[3]劉旺.太陽能車電氣系統及功率平衡控制[D].長沙:中南大學,2013:11-15.
[4]崔巖,蔡炳煌,李大勇,等.太陽能光伏系統MPPT控制算法的對比研究[J].太陽能學報,2006,27(6):535-539.
[5]付志超.基于信息融合技術的煤礦井下探測機器人檢測系統研究[D].太原: 太原理工大學,2010.
[6]邱河波.基于DSP的移動機器人雙目視覺技術研究[D].成都:電子科技大學,2013:14-15.
[7]王巍,梁斌,強文義.月球探測機器人及其關鍵技術淺析[J].哈爾濱工業大學學報,2001,33(3):321-325.
Design of electrical system for exploration robot
ZHAI Guodong,SU Yixin,GAO Peiyuan
(School of Mechanical Electronic and Information Engineering,China University of Mining and Technology (Beijing), Beijing 100083, China)
Abstract:In order to improve intelligence of exploration robot, an electrical system taking ARM architecture as core was designed. The system adopts techniques including 2.4 GHz wireless communication, closed-loop control of motors, control of multi degree of freedom mechanical arm and multi sensor information fusion to achieve functions of obstacle avoidance, obstacle crossing, positioning, communication and sensor measurement. It uses photovoltaic effect and improved hill climbing method to realize maximum power point tracking, and solves energy consumption problem of exploration robot.
Key words:exploration robot; electrical system; photovoltaic power generation; MPPT
文章編號:1671-251X(2016)07-0079-04
DOI:10.13272/j.issn.1671-251x.2016.07.020
收稿日期:2016-01-25;修回日期:2016-05-16;責任編輯:胡嫻。
基金項目:中央高校基本科研業務費專項資金資助項目(2014YJ02)。
作者簡介:翟國棟(1973-),男,河北高碑店人,高級工程師,博士,主要從事機電專業的教學、科研工作,E-mail:zgd@cumtb.edu.cn。
中圖分類號:TD67
文獻標志碼:A網絡出版時間:2016-07-05 15:05
翟國棟,蘇一新,高培源.探測機器人電氣系統設計[J].工礦自動化,2016,42(7):79-82.
