四輪獨立驅動電動汽車直線行駛穩定協調控制
2016-07-15 03:48:25黃錫超
重慶理工大學學報(自然科學) 2016年6期
黃錫超,江 洪,徐 興
(江蘇大學 a.汽車與交通工程學院;b.機械工程學院,江蘇 鎮江 212013)
?
四輪獨立驅動電動汽車直線行駛穩定協調控制
黃錫超a,江洪b,徐興a
(江蘇大學a.汽車與交通工程學院;b.機械工程學院,江蘇 鎮江212013)
摘要:為降低兩側車輪垂直載荷轉移和附著系數互異路面對四輪轂電機獨立驅動電動汽車直線行駛穩定性的影響,通過分析直線行駛失穩跑偏的原因,設計了一種四輪獨立驅動協調控制系統。該系統由滑模變結構控制計算糾正跑偏所需的附加橫擺力矩,再結合電機驅動的原理和車輪滑轉狀態,協調分配輪轂電機產生附加橫擺力矩或進行車輪防滑控制所需電壓調節值。使用Matlab/Simulink建立了14自由度整車模型進行干擾工況的仿真控制,與驅動平均分配及無控制下車輛出現的直線行駛跑偏情況相比,表明協調控制使車輛橫擺角速度在(0±0.05°)/s內,較好地提高了車輛直線行駛的穩定性。
關鍵詞:輪轂電機;四輪獨立驅動;滑模;協調控制;直線穩定性
四輪獨立驅動電動汽車四輪間不存在差速器等機械連接,車輪直接由電機驅動,具有傳動效率高、各驅動輪轂電機可獨立控制且響應迅速等優勢[1],打破了傳統車輛直線行駛失穩時輪間驅動力不可單獨調節的限制,但也產生了新的多電機間驅動協調控制的問題。文獻[2-3]分析了兩側車輪驅動力矩差異與車輛直線行駛穩定性的關系。文獻[4-5]研究了電機穩態和動態誤差對四輪獨立驅動電動車直線行駛的影響。文獻[6-8]對車輛進入防滑工況產生的非期望橫擺力矩與橫擺角速度等問題進行了研究。目前有關直線行駛穩定性的研究基本針對單一干擾工況,且忽略了電機驅動原理,采用理想轉矩控制分配。本文通過分析四輪獨立驅動汽車直線行駛跑偏的原因和過程,以橫擺角速度為被控變量,設計了保證車輛直線穩定行駛和防止車輪過度滑轉的四輪獨立驅動電動汽車協調控制系統,并以兩側車輪垂直載荷轉移和附著系數互異路面工況驗證了所設計的協調控制系統的有效性和適用性。
1直線行駛不穩定跑偏分析
如圖1所示,車輛以速度Vx直線行駛,當垂直載荷轉移和附著系數互異路面干擾兩側車輪驅動力失衡時,設Fx2+Fx4>Fx1+Fx3,兩側車輪將繞垂直于地面的質心軸產生逆時針方向橫擺力矩。為達到運動平衡狀態,輪胎發生側偏,側偏角為αi(i=1,2,3,4分別代表左前輪、右前輪、左后輪和右后輪),以側向力Fyi形成反向橫擺力矩,抵制橫擺角速度的增大。隨著輪胎側偏力增加,最終輪胎縱、側向力繞質心軸的橫擺力矩為0。此過程產生一個恒值非0的橫擺角速度r,致使車輛直線行駛持續跑偏。

圖1 兩側車輪驅動力不等時車輛跑偏過程
車輛直線跑偏的根本原因是兩側車輪驅動力不相等;直接原因是產生導致行駛跑偏的橫擺角速度。選取車輛橫擺角速度為系統被控變量,監控車輛直線行駛狀態,并對各輪電機驅動進行協調控制與分配,實時糾正跑偏,從而提高車輛直線行駛穩定性。
2仿真模型
為進行四輪獨立驅動協調控制系統仿真,采用了模塊化思想,建立輸入量為電機驅動電壓、輸出量為車輛直線行駛信息的仿真模型,主要包括整車動力學模型、輪胎模型和輪轂電機模型等子模型。
2.1整車動力學模型
四輪獨立驅動電動車動力學模型主要包括車體縱向、側向、橫擺和車身垂向、俯仰、側傾6自由度,車輪轉動4自由度,車輪垂向4自由度,共14自由度[9]。假設車輛水平面行駛,前后輪距相等,質心在車軸中心線上,靜止時各輪胎力學特性相同。
車輛的6自由度動力學方程:
(1)
獨立懸架單輪非簧載質量垂向運動方程:
(2)
車身簧載質量受到各懸架作用力:
(3)
由側傾俯仰形成的懸架與車身連接點絕對位移:
(4)
四驅動車輪旋轉力矩平衡方程:
(5)
式中:M為整車質量;Mb為簧載質量;Mt為車輪非簧載質量;Fxi為輪胎縱向力;Fyi為輪胎側向力;Fw為行駛空氣阻力;Vx為整車縱向速度;Vy為整車側向速度; Vz為簧載質量質心垂向速度;zb為簧載質量的質心高度;zti為車輪非簧載質量的質心高度;qi為4車輪的路面垂向輸入;lf,lr分別為前軸和后軸到質心的距離;T為輪距;Rei為車輪滾動半徑;hx,hy分別為整車質心到側傾軸和俯仰軸的距離;Ix,Iy,Iz分別為側傾、俯仰和橫擺轉動慣量;θ為俯仰角;φ為側傾角;r為橫擺角速度;ksi為懸架剛度;bsi為懸架阻尼;Kt為輪胎垂直剛度;J為電機輪轉動慣量;Tei為電機輸出轉矩;ωci為電機輪旋轉角速度;Tfi為車輪滾動阻力矩。
2.2輪胎模型
為了準確得到輪胎縱向力和側向力,采用能模擬輪胎各工況受力狀態、具有高仿真精度的半經驗冪指數輪胎模型[10]。模型輸入主要有縱向滑轉率、側偏角和垂直載荷等。
模型輸出輪胎縱向力:
(6)
模型輸出輪胎側向力:
(7)
由式(2)得各輪胎垂直載荷:
(8)
式中:E為總切力曲率因子;φx,φy和φ分別為定義縱向、側向及量綱為1的總滑移率;μx,μy分別為輪胎縱向、側向摩擦因數。
2.3輪轂電機模型
輪轂電機是四輪獨立驅動系統動力源,其機械原理及特性直接影響到車輛驅動協調控制效果。現在多數研究過于簡化電機模型,完全理想化,按驅動需求輸出轉矩。本文建立簡化了的且能體現驅動特性的電機模型,由文獻[11]得直流無刷輪轂電機傳遞函數:
(9)
式中:Ud,Rd,Ld分別為導通兩相繞組的端電壓、電阻和自互電感差;KT為轉矩系數;Ke為反電動勢系數;Bv為黏滯摩擦因數。
直流無刷電機的電流與輸出轉矩成正比,將電流Id和轉速ωc分別作為電機系統的2個狀態變量,增加電流對電機輸入電壓的反饋κ和相應電路延遲Ks,構成電流和轉速雙閉環調節電機模型,如圖2所示。

圖2 電機驅動模型框圖
3四輪獨立驅動協調控制系統設計
四輪獨立驅動協調控制系統輸出協調分配后的各輪轂電機的輸入電壓調節值△Ui,主要由基于滑模變結構控制的附加橫擺力矩計算,以及直線行駛穩定分配與車輪防滑控制兩部分組成,如圖3所示。

圖3 四輪驅動協調控制系統框圖
3.1基于滑模變結構控制的附加橫擺力矩計算
滑模變結構控制的滑動模態不受系統參數攝動和外界擾動影響,具有良好的動態品質和魯棒性[12],較符合車輛直線行駛穩定控制要求。在橫擺穩定狀態下,前后輪側偏力與兩側車輪驅動力繞質心軸橫擺力矩大小相等、方向相反。為防止或消除直線行駛的橫擺跑偏,即輪胎側偏,需要調節兩側輪轂電機轉矩產生附加橫擺力矩。由車輛橫擺運動方程得:
(10)
橫擺角加速度體現車輛直線跑偏趨勢,橫擺角速度致使車輛持續直線跑偏,橫擺角則反映車輛直線跑偏程度。為保證良好直線行駛穩定性,設計了由這三者構成的滑模面切換函數:
(11)
其中k1,k2為待定權重系數。為滿足滑模到達條件,即在較短時間內快速到達滑模面,保證系統動態品質和魯棒性,削弱滑模面運動抖振,對滑模運動采用改進的指數趨近律[13]處理:
(12)
式中,sgn(s)為符號函數。系數k3越大,在遠離滑模面時趨近速度越大;ε越小,則在滑模面附近抖動速度越小。合理調整k3和ε值可提高滑模變結構控制性能。由式(11)和(12)得:
(13)
將式(13)代入式(10),計算糾正直線行駛跑偏所需的附加橫擺力矩:
(14)
3.2直線行駛穩定協調分配與防滑控制
直線行駛協調控制的關鍵是盡可能有效、快速地產生糾偏所需的附加橫擺力矩,同時保證滿足車輛縱向驅動的轉矩需求,因此采用四輪平均和兩側車輪正負相反的方式對附加橫擺力矩ΔMz進行分配。車輪驅動力調節值與ΔMz的分配關系為:
(15)
電機轉矩等于車輪半徑與驅動力的乘積,與電流成正比。結合式(15),將分配給車輪的附加橫擺力矩ΔMz轉換成輪轂電機電流調節量:
(16)
電機轉矩由電流控制,而電流控制是通過調節電子功率開關逆變器改變導通兩繞組相電壓實現的。基于電流調節量,對正常驅動車輪采用PID控制方法計算輪轂電機產生附加橫擺力矩協調分配量的電壓調節值:
(17)
式中KMp,KMi和KMd分別是協調分配PID的控制比例系數、積分常數和微分常數。
在分配調節過程,當增大驅動轉矩側車輪出現滑轉時,為使車輛在低附著系數路面獲得較大驅動力,設防滑閥值Sp為0.25,即當車輪滑轉率Sxi大于Sp時,對出現滑轉車輪實行PID防滑控制[14]。由Sxi與Sp差值ei計算輪轂電機防滑所需的電壓調節值:
(18)
其中Ksp,Ksi和Ksd分別是車輪防滑PID控制中的比例系數、積分常數和微分常數。
協調控制系統分配流程如圖4所示,其中γ是控制閥值(設定γ=0.05 (°)/s),系統輸出經協調控制與分配的各電機驅動電壓調節值。
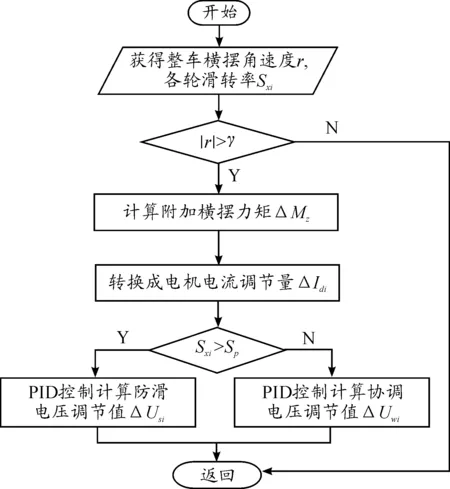
圖4 協調控制系統分配流程
4仿真結果及分析
根據各模塊的物理模型,在Matlab/Simulink中建立四輪獨立驅動協調控制系統模型,主要參數見表1。采用兩側車輪附著系數互異路面和垂直載荷轉移工況進行仿真分析,驗證協調控制效果。
4.1兩側車輪附著系數互異路面仿真
對開路面即為車輛兩側車輪附著系數高低不同的路面,設左右側車輪接觸路面的附著系數分別為0.1和0.8,給電機輸入47V驅動電壓,車輛從靜止開始加速至勻速行駛,施加協調控制前后車輛的仿真控制結果如圖5~11所示。
表1仿真主要參數

參數數值整車質量M/kg730前軸到質心距離lf/m0.935后軸到質心距離lr/m0.830前/后輪距T/m1.425繞x側傾轉動慣量Ix/(kg·m2)450繞y俯仰轉動慣量Iy/(kg·m2)871繞z橫擺轉動慣量Iz/(kg·m2)953電動輪轉動慣量J/(kg·m2)1.2總切力曲率因子E0.3輪胎縱向摩擦因數μx0.8輪胎側向摩擦因數μy0.8輪胎縱向剛度Kx/(N·m-1)11300輪胎側向剛度Ky/(N·m-1)16900輪胎垂直剛度Kt/(N·m-1)210000電機轉矩系數KT/(N·m·A-1)0.62電機反電動勢系數Ke/(V·s·rad-1)0.62電機兩相繞組自互電感差Ld/H1.15×10-4電機兩相繞組電阻Rd/Ω0.0365電機黏滯摩擦因數Bv/(N·m·s)0.0001

圖5 車輛橫擺角速度r對比

圖6 車輛側向加速度ay對比

圖7 直線行駛車速對比

圖8 車輛直線軌跡跑偏量對比

圖9 車輪滑轉率Sxi對比
在無控制下兩側電機驅動電壓平均分配,輪轂電機輸出的轉矩相等。在起步階段,由于低轉速時電機輸出的轉矩較大,低附著系數路面一側車輪出現滑轉,無法提供與高附著系數路面一側車輪相等的驅動力,車輛從而產生橫擺和跑偏運動,以致無法正常穩定起動,偏離最初的直線方向行駛。
施加協調控制后,車輛加速性能雖略微降低,但最終穩定的車速有一定提高。車輪滑轉率基本控制在0.25內,橫擺角速度、側向加速度和直線軌跡跑偏量分別不大于0.12 °/s,0.01m/s2和0.7m。由此表明:協調控制使四輪獨立驅動電動車在對開路面直線啟動行駛的穩定性得到了提高和保證。

圖10 電機驅動電壓Ui對比

圖11 車輪驅動力Fxi對比
4.2兩側車輪垂直載荷轉移仿真
兩側車輪垂直載荷轉移主要分兩種:一是由車內乘員載荷或兩邊傾斜路面等形成的穩定垂直載荷轉移;二是不平路面等工況導致的瞬態垂直載荷轉移。
4.2.1穩定垂直載荷轉移
在良好附著路面,車輛以約60km/h的速度直線行駛,仿真40s時左側前后輪垂直載荷分別增加100N,右側前后輪垂直載荷分別減少100N。車輛直線跑偏仿真與協調控制情況分別見圖12~17。

圖12 車輛橫擺角速度r對比

圖13 車輛側向加速度ay對比

圖14 直線行駛車速V對比

圖15 車輛直線軌跡跑偏量對比

圖16 電機驅動電壓Ui對比

圖17 車輪驅動力Fxi對比
在兩側車輪突遭垂直載荷轉移干擾過程時,各輪未發生滑轉,但驅動力平衡狀態改變,導致車輛產生橫擺角速度和橫擺角,直線行駛時向左跑偏,且車速下降。施加協調控制后,在車輛遭到干擾時迅速分配兩側輪轂電機輸出轉矩,將橫擺角速度(0±0.05 °)/s和側向加速度(0±0.01)m/s2限定在較小范圍內,從而有效快速防止車輛跑偏,保持直線行駛車速穩定,跑偏量由150m變為-1.2m。
4.2.2瞬態垂直載荷轉移
在給定電機47V驅動電壓下,車輛以約60km/h的速度勻速直線行駛,仿真40s時駛入所建立的E級不平路面[15],相應的仿真控制效果如圖18~23所示。

圖18 車輛橫擺角速度r對比

圖19 車輛側向加速度ay對比

圖20 直線行駛車速V對比

圖21 車輛直線軌跡跑偏量對比

圖22 電機驅動電壓Ui對比

圖23 車輪驅動力Fxi對比
由圖18可知:兩側車輪瞬態垂直載荷轉移產生的橫擺角速度雖大,但方向左右頻繁改變,因此所能形成的橫擺角較小,車輛跑偏現象不明顯。如圖21和23所示:協調控制前后,雖由車輪驅動力對比無法判別控制效果,但車輛最大跑偏量由2.5m減小到0.03m,說明協調控制仍有效保證橫擺角速度左右頻變類型工況的車輛直線行駛的穩定性。
5結論
1) 設計的協調控制系統能快速消除由車輪自身滑轉和垂直載荷轉移等車輛縱向力干擾工況導致兩側車輪驅動力失衡而產生的車輛直線行駛跑偏,具有較好的適用性。在干擾工況下,四輪獨立驅動電動車的直線行駛穩定性得到有效保證。
2) 在車輪出現滑轉情況下,協調控制車輪滑轉與直線行駛穩定性,將車輪滑轉率限制在設定范圍內,減小了直線跑偏和車輪滑轉對車輛動力性的影響。由于受電池系統所能提供電機的輸入電壓范圍的限制,糾偏的快速性受限,尤其對復雜左右跑偏的協調控制效果還需進一步研究。
參考文獻:
[1]余卓平,馮源,熊璐,等.分布式驅動電動汽車動力學控制發展現狀綜述[J].機械工程學報,2013,49(8):105-111.
[2]楊志安.四輪獨立驅動電動車輛直線行駛特性的研究[D].秦皇島:燕山大學,2012.
[3]WANGLifang,LIYong,LIJunfeng,etal.TorqueCoordinationControlofDistributedDriveElectricVehicleforStraightLineDriving[C]//2014IEEETransportationElectrificationConferenceandExpo,ITECAsia-Pacific2014.Beijing:IEEE,2014.
[4]張緩緩,王慶年.電動輪驅動電動汽車直線行駛轉矩協調試驗研究[J].汽車技術,2010(8):16-19.
[5]DONGZ,HEP,HANC.TheDesignofAnti-slipControlforIn-wheelMotoratTheLimitedConditionsinaFourIn-wheelMotorDriveElectricVehicle[C] // 2012 19thInternationalConferenceonMechatronicsandMachineVisioninPractice,M2VIP2012.Auckland,NewZealand:IEEE,2012.
[6]XUWenli,WUSen,TIANShaopeng,etal.StudyontheStraight-LineRunningStabilityofOff-roadVehiclewithIn-wheelMotors[C]//4thInternationalConferenceonManufacturingScienceandTechnology,ICMST2013.Dubai,Unitedarabemirates:[s.n.],2013:454-458.
[7]褚文博,羅禹貢,趙峰,等.分布式驅動電動車輛驅動轉矩協調控制[J].汽車工程,2012,34(3):185-189.
[8]MAEDAK.FUJIMOTOH,HORIY.Four-wheelDriving-forceDistributionMethodforInstantaneousorSplitSlipperyRoadsforElectricVehiclewithIn-wheelMotors[C]//2012 12thIEEEInternationalWorkshoponAdvancedMotionControl,AMC2012.Sarajevo,BosniaandHerzegovina:IEEE,2012.
[9]李剛,李寧,段敏,等.基于Simulink的四輪輪轂電機電動汽車仿真模型開發[J].遼寧工業大學學報,2012,32(3):185-189.
[10]郭耀華.驅動與制動工況輪胎模型研究[D].長春:吉林大學,2009.
[11]劉鋒.輪轂驅動電動汽車整體設計與研究[D].武漢:武漢理工大學,2011.
[12]劉金琨.滑模變結構控制MATLAB仿真[M].2版,北京:清華大學出版社,2012.
[13]毛艷娥,井元偉,張嗣瀛,等.基于滑模控制的四輪驅動電動汽車穩定性控制[J].系統仿真學報,2008,20(5):1243-1246.
[14]LIJunwei,QUBaojun.ResearchonAccelerationSlipRegulationSystemforTwoWheelDriveElectricVehicle[C] //Proceedingsofthe2009IEEEInternationalConferenceonMechatronicsandAutomation,ICMA2009.Changchun:IEEE,2009:807-811.
[15]方浩,李曉賓,王璐,等.基于路面隨機激勵的8自由度整車動力學仿真[J].中國工程機械學報,2007(2):167-173.
(責任編輯楊文青)
Coordinated Control for Straight-Line Driving Stability ofaFourWheelIndependentDriveElectricVehicle
HUANG Xi-chaoa,JIANG Hongb,XU Xinga
(a.School of Automotive and Traffic Engineering;b.SchoolofMechanicalEngineering,JiangsuUniversity,Zhenjiang212013,China)
Abstract:Inordertoreducetheeffectonthestraight-linedrivingstabilityofafourwheel-motor-drivenelectricvehicleengenderedbyverticalloadsandadhesionroadinequalitybetweenwheelsonbothsides,thecoordinatedcontrolsystemwasdesignedthroughanalyzingthereasonsofvehicledeviation.Therequiredadditionalyawmomentofcorrectingvehicledeviationwascalculatedbyslidingmodelcontrol,andthenthevoltageregulationvaluesofhubmotorforgeneratingtheadditionalyawmomentorantiskidcontrolwasdistributedcoordinatelywiththemotordrivingprincipleandthewheelslipstatesinthedesignedsystem.Simulationwasimplementedinthe14DOFsvehiclemodelestablishedbyMatlab/Simulinkunderdifferentoperatingconditions.Comparedwiththesituationsofvehicledeviationintheaverageallocationofdrivingwithoutanycontrol,thesimulationresultsshowthattheyawofvehicleisintherangeof(0±0.05°)/spresetedandthestraight-linedrivingstabilityisimprovedobviously.
Keywords:hubmotor;fourwheelindependentdriving;slidingmode;coordinatedcontrol;straight-linestability
收稿日期:2015-10-10
基金項目:江蘇省“六大人才高峰”項目(2014-JXQC-004)
作者簡介:黃錫超(1987—),男,廣東人,碩士研究生,主要從事電動汽車性能模擬與控制研究。
doi:10.3969/j.issn.1674-8425(z).2016.06.004
中圖分類號:U469.72
文獻標識碼:A
文章編號:1674-8425(2016)06-0017-09
引用格式:黃錫超,江洪,徐興.四輪獨立驅動電動汽車直線行駛穩定協調控制[J].重慶理工大學學報(自然科學),2016(6):17-25.
Citationformat:HUANGXi-chao,JIANGHong,XUXing.CoordinatedControlforStraight-LineDrivingStabilityofaFourWheelIndependentDriveElectricVehicle[J].JournalofChongqingUniversityofTechnology(NaturalScience),2016(6):17-25.
