彈道導(dǎo)彈被動段中斷航跡關(guān)聯(lián)方法
2016-06-29 04:27:25毛藝帆張多林
裝甲兵工程學(xué)院學(xué)報 2016年2期
毛藝帆, 張多林, 王 路
(空軍工程大學(xué)防空反導(dǎo)學(xué)院, 陜西 西安 710051)
彈道導(dǎo)彈被動段中斷航跡關(guān)聯(lián)方法
毛藝帆, 張多林, 王路
(空軍工程大學(xué)防空反導(dǎo)學(xué)院, 陜西 西安 710051)
摘要:為了解決航跡中斷前后難以判定目標(biāo)歸屬的問題,對處于被動段飛行的彈道導(dǎo)彈中斷航跡關(guān)聯(lián)問題進(jìn)行了研究。在目標(biāo)密集的環(huán)境下,將舊航跡的預(yù)測航跡和新航跡的濾波航跡作為關(guān)聯(lián)樣本,計算目標(biāo)之間的統(tǒng)計距離并以此作為費(fèi)用矩陣,將航跡關(guān)聯(lián)問題轉(zhuǎn)換為最優(yōu)分配問題,并采用粒子群算法對模型進(jìn)行求解,得到最終的關(guān)聯(lián)航跡對。最后,通過仿真驗證了該方法的有效性。
關(guān)鍵詞:彈道導(dǎo)彈;航跡片段; 統(tǒng)計距離; 航跡關(guān)聯(lián)
航跡關(guān)聯(lián)是航跡融合的基礎(chǔ)和關(guān)鍵,主要用于解決不同航跡是否源于同一目標(biāo)的問題,其有效性將直接影響后續(xù)融合結(jié)果的正確性。傳統(tǒng)航跡關(guān)聯(lián)主要基于航跡連續(xù)這一假設(shè)條件,只需對航跡之間的相關(guān)性進(jìn)行判定,并且方法已較為成熟,如基于統(tǒng)計的方法[1-3]或基于模糊理論的方法[4-5]。然而,受探測環(huán)境、探測器性能等諸多不確定性因素的影響,航跡有可能出現(xiàn)中斷的情況,中斷一旦產(chǎn)生,傳感器將對新航跡重新進(jìn)行編批,會對航跡融合產(chǎn)生嚴(yán)重干擾,致使中斷前已獲取的目標(biāo)信息(位置信息、屬性信息等)在中斷后無法使用,這對時效性要求很高的反導(dǎo)作戰(zhàn)來說,有可能造成致命影響。因此,研究航跡中斷條件下的新、舊航跡快速關(guān)聯(lián)方法意義重大。
針對中斷航跡關(guān)聯(lián)問題,最早在20世紀(jì)80年代就有相關(guān)的研究[6],也取得了一定的成果[7-9],然而針對彈道目標(biāo)被動段中斷航跡關(guān)聯(lián)的研究還較少。目前,研究者[6-10]普遍采用舊航跡的正向預(yù)測航跡作為其中一個樣本,采用新航跡起始的一個量測點作為另一個樣本,但這種樣本的缺點是:新航跡的單個量測點同時存在系統(tǒng)噪聲和量測噪聲,未經(jīng)過處理,誤差較大,對關(guān)聯(lián)算法的要求較高。
為了解決以上問題,筆者采用舊航跡的正向預(yù)測航跡和新航跡的正向濾波航跡作為關(guān)聯(lián)樣本,基于新定義的費(fèi)用矩陣將航跡關(guān)聯(lián)問題轉(zhuǎn)換為最優(yōu)分配問題,并選用粒子群算法進(jìn)行求解,最后通過仿真驗證其有效性。
1關(guān)聯(lián)樣本獲取方法
1.1關(guān)聯(lián)樣本選擇
航跡關(guān)聯(lián)樣本的選擇就是對航跡關(guān)聯(lián)算法進(jìn)行計算的對象進(jìn)行選擇,其對關(guān)聯(lián)結(jié)果具有至關(guān)重要的影響。在中斷航跡關(guān)聯(lián)問題中,將中斷前、后的航跡段分別稱為舊航跡和新航跡。筆者分別選擇舊航跡的正向預(yù)測航跡和新航跡的正向濾波航跡作為關(guān)聯(lián)樣本,如圖1所示,它們是2類在時間上重疊的航跡數(shù)據(jù)。之所以選擇這樣的關(guān)聯(lián)樣本,是因為:1)舊航跡的正向預(yù)測航跡是由中斷前的航跡量測及估計數(shù)據(jù)遞推獲取的,來源可靠;2)新航跡的正向濾波航跡是新航跡量測值根據(jù)濾波模型獲取的,與單純的量測值相比,在一定程度上降低了噪聲,從而減小了航跡關(guān)聯(lián)的誤差。假設(shè)樣本長度為L,表示自新航跡起始時刻開始的L個探測周期,在k時刻,舊航跡的預(yù)測航跡表示為Xpre(k),新航跡的濾波航跡表示為Xfil(k),k∈{1,2,…,L},則Xpre(k)和Xfil(k)是本文要使用的關(guān)聯(lián)樣本。
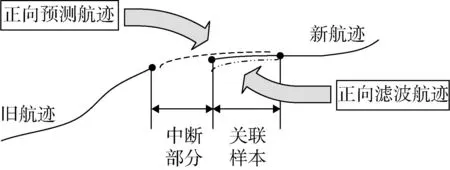
圖1 關(guān)聯(lián)樣本
1.2關(guān)聯(lián)樣本計算模型
由于目標(biāo)量測狀態(tài)缺失,因此采用正向航跡遞推方法進(jìn)行預(yù)測,得到正向預(yù)測航跡;同樣地,由于航跡中斷,量測狀態(tài)缺失,新航跡也符合被動段的運(yùn)動模型,因此采用針對被動段彈道導(dǎo)彈跟蹤的狀態(tài)方程和量測方程進(jìn)行計算即可。
1.2.1坐標(biāo)系的選擇
在現(xiàn)有的彈道目標(biāo)跟蹤相關(guān)研究中,關(guān)于坐標(biāo)系的選擇有3種情況[11-12]:1)采用笛卡爾坐標(biāo)系表示狀態(tài)方程和量測方程,其缺點是量測有偏,在各個方向互相耦合,量測噪聲是非高斯和依賴于狀態(tài)的噪聲,造成濾波困難;2)采用傳感器坐標(biāo)系表示狀態(tài)方程和量測方程,其缺點是量測方程線性非耦合,目標(biāo)動力學(xué)方程難以進(jìn)行推導(dǎo);3)采用混合坐標(biāo)系,即首先在狀態(tài)方程坐標(biāo)系下進(jìn)行狀態(tài)預(yù)測和協(xié)方差預(yù)測,然后將預(yù)測值轉(zhuǎn)換到量測方程坐標(biāo)系下進(jìn)行傳感器坐標(biāo)系的狀態(tài)更新,最后將傳感器坐標(biāo)系的狀態(tài)更新結(jié)果轉(zhuǎn)移到狀態(tài)方程坐標(biāo)系。采用混合坐標(biāo)系雖然會因多次坐標(biāo)轉(zhuǎn)換而產(chǎn)生誤差,但與采用其他2種坐標(biāo)系相比,狀態(tài)方程相對較簡單,易于計算和工程實現(xiàn)[11-13]。因此,筆者在被動段彈道導(dǎo)彈跟蹤中選擇混合坐標(biāo)系,其中:狀態(tài)方程坐標(biāo)系為雷達(dá)陣地坐標(biāo)系;量測方程坐標(biāo)系為球坐標(biāo)系。
1.2.2狀態(tài)方程和量測方程
彈道導(dǎo)彈被動段可細(xì)分為自由段和再入段,由于自由段受力簡單,可認(rèn)為其只存在地球引力,而再入段除了存在地球引力外,還存在空氣阻力,因此本文只考慮再入段的跟蹤濾波。由于導(dǎo)彈在再入段的飛行時間較短,因此可忽略地球公轉(zhuǎn)、自轉(zhuǎn)及其他天體的影響[14-16]。在雷達(dá)站陣地坐標(biāo)系下,目標(biāo)的動力學(xué)模型[9]為
(1)
式中:v為速度;g為重力加速度;ρ(z)=γexp(ηz),為空氣密度,其中,γ=1.754[17],z為目標(biāo)距離地面的高度,η=-1.49×10-4=-1/6 700(6 700為大氣密度標(biāo)高);β為彈道系數(shù),有多種建模方法,本文中β=M/(CDS),其中,M為目標(biāo)質(zhì)量,CD為阻力系數(shù),S為目標(biāo)迎風(fēng)截面積。

Xk+1=ΦXk+Gfk(Xk)+G(0,0,-g)T+Wk,
(2)
式中:Wk為過程噪聲;

其中,I3為3×3維的單位矩陣,O3為3×3維的零矩陣,T為濾波周期;

(3)
其中Xk(i)為Xk的第i維信息,i=3,4,5,6,7。
假設(shè)Wk是白噪聲,且與測量噪聲是互相獨立的,則其協(xié)方差陣為

(4)
式中:q1為目標(biāo)位置的過程噪聲;由于在建模時增加了彈道系數(shù)β這一項,因此q2為彈道系數(shù)β的過程噪聲。
量測方程為
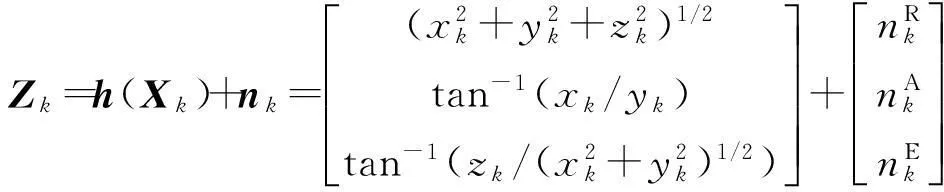
(5)

(6)
因此,根據(jù)給出的狀態(tài)方程和量測方程,可獲取需要的關(guān)聯(lián)樣本數(shù)據(jù)。
2基于統(tǒng)計距離的航跡關(guān)聯(lián)
2.1相關(guān)定義


定義2:k時刻,關(guān)聯(lián)矩陣為Π,其元素為πij,只能取0或者1,當(dāng)πij=1時,表示X(k)中第i個航跡和X′(k)中第j個航跡是相關(guān)的;當(dāng)πij=0時,二者是不相關(guān)的。設(shè)舊航跡共有u個目標(biāo),新航跡共有w個目標(biāo),則關(guān)聯(lián)矩陣為

(7)
2.2航跡關(guān)聯(lián)模型
通過計算樣本之間的統(tǒng)計距離g(i,j),將其作為費(fèi)用矩陣,并基于其將航跡關(guān)聯(lián)問題轉(zhuǎn)化為運(yùn)籌學(xué)中常見的最優(yōu)分配問題。其求解方法眾多,最基本的方法是匈牙利法和朗格朗日松弛法,比較常用的方法是智能算法,如遺傳算法、蟻群算法和粒子群算法等。由于粒子群算法參數(shù)調(diào)節(jié)及實現(xiàn)相對簡單,且尋優(yōu)能力很強(qiáng),因此本文采用粒子群算法進(jìn)行求解[19]。中斷航跡關(guān)聯(lián)的多維分配模型為
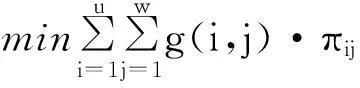
(8)
(9)
式(8)為模型的目標(biāo)函數(shù),表示對關(guān)聯(lián)矩陣Π的元素πij采用統(tǒng)計距離g(i,j)加權(quán)求和之后取最小值;式(9)為模型的約束條件,表示關(guān)聯(lián)矩陣Π每一行(列)只有一個元素取值為1。因此,滿足目標(biāo)函數(shù)的所有航跡對即為k時刻的關(guān)聯(lián)航跡對。以此類推,可得整個關(guān)聯(lián)樣本在每一步的關(guān)聯(lián)航跡對,此時,設(shè)置一個計數(shù)器,當(dāng)k時刻有關(guān)聯(lián)成功的航跡對時,令計數(shù)器c(i,j)加1;反之,則數(shù)值不變。經(jīng)過長度為R的樣本關(guān)聯(lián)之后,若c(i,j)>I,則認(rèn)為航跡i和j關(guān)聯(lián);反之,則不關(guān)聯(lián),需要進(jìn)入下一個檢測周期進(jìn)行關(guān)聯(lián)檢測。I/R邏輯需要設(shè)置的I和R值實際上就是雙門限檢測樣本值和第二門限值,通常設(shè)置為3/5、6/8、6/10等[20-21],根據(jù)具體環(huán)境的不同,其選取也不同。當(dāng)雙門限檢測樣本值較大時(如I=10),航跡預(yù)測長度會增加,預(yù)測誤差也隨之增大,總的關(guān)聯(lián)正確率就會降低;加之本文的關(guān)聯(lián)樣本是經(jīng)歷了中斷之后的航跡預(yù)測值,為了最大程度地減小預(yù)測誤差帶來的關(guān)聯(lián)正確率降低的問題,應(yīng)選用比較小的雙門限檢測樣本值。因此,本文中I/R邏輯選擇3/5規(guī)則。
3仿真驗證
為驗證本文方法的有效性,筆者進(jìn)行了仿真試驗。仿真場景設(shè)置如下:假設(shè)探測目標(biāo)為30批射程3 000 km左右的中近程彈道導(dǎo)彈,目標(biāo)源數(shù)據(jù)可由STK軟件生成,添加相應(yīng)的噪聲之后作為傳感器量測數(shù)據(jù)。假設(shè)傳感器采樣周期為T=2 s,測距誤差、測角誤差和測速誤差的標(biāo)準(zhǔn)差分別為σr=400 m,σθ=0.2 mrad,σv=50 m/s,均服從均值為0的正態(tài)分布。假設(shè)航跡中斷的時長為10 s,即5個探測周期,對于所有目標(biāo),每個目標(biāo)的平均探測周期約為450個左右,航跡中斷位于第325~330周期。按照本文方法對量測值進(jìn)行處理,生成關(guān)聯(lián)樣本,樣本設(shè)置為10個探測周期的目標(biāo)預(yù)測航跡和濾波航跡,對航跡關(guān)聯(lián)進(jìn)行50次蒙特卡羅仿真。圖2為30批彈道導(dǎo)彈原始航跡信息,其中細(xì)節(jié)圖是中斷部分的航跡。圖3為航跡中斷前后原始的量測信息,由于目標(biāo)分布比較密集,故只顯示其中10批探測目標(biāo)(t1,t2,…,t10)。圖4為經(jīng)過關(guān)聯(lián)融合之后的結(jié)果,可以看出:在中斷時間段之后,關(guān)聯(lián)成功的樣本進(jìn)行加權(quán)融合,航跡比較平滑,接近于真實值。采用本文方法與文獻(xiàn)[8]、[9]中的方法進(jìn)行航跡關(guān)聯(lián)正確率比較,結(jié)果如圖5所示,可以看出:本文方法是行之有效的,且優(yōu)于文獻(xiàn)[8]、[9]中的方法。
改變仿真條件,進(jìn)行進(jìn)一步研究。假設(shè)航跡中斷時長逐漸增加,每次增加1個采樣周期,其他仿真條件不變,采用本文方法進(jìn)行仿真,可得中斷時長與航跡關(guān)聯(lián)正確率的關(guān)系,如表1所示。可以看出:隨著中斷時長增加,航跡關(guān)聯(lián)正確率逐漸降低,當(dāng)中斷時長為10個采樣周期時,航跡關(guān)聯(lián)正確率已經(jīng)下降到0.4左右。產(chǎn)生這種結(jié)果的原因是:當(dāng)中斷時長增加時,舊航跡需要進(jìn)行正向預(yù)測的步數(shù)增多,預(yù)測誤差越來越大,導(dǎo)致后續(xù)的航跡關(guān)聯(lián)正確率越來越低。所以,中斷航跡關(guān)聯(lián)的實現(xiàn)是有條件的,對本文方法而言,在航跡中斷不超過6個采樣點的情況下,可認(rèn)為本文方法是有效的。
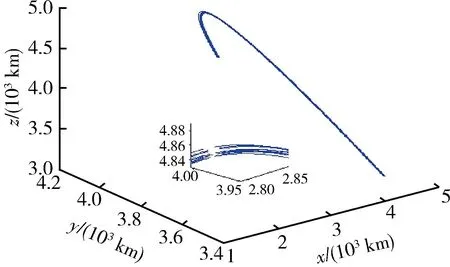
圖2 彈道導(dǎo)彈原始航跡及其中斷航跡

圖3 中斷前后量測航跡

圖4 關(guān)聯(lián)融合后的航跡
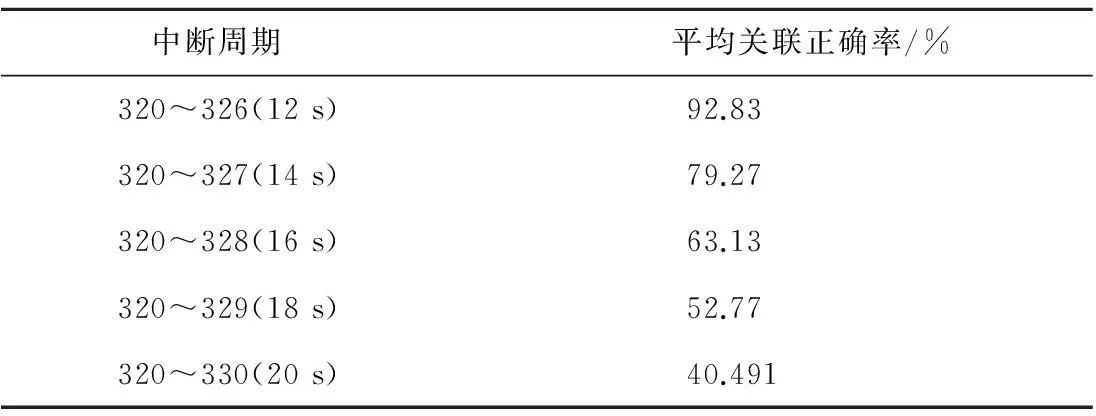
表1 中斷時長與航跡關(guān)聯(lián)正確率的關(guān)系
4結(jié)論
筆者研究了彈道導(dǎo)彈被動段中斷航跡關(guān)聯(lián)問題,在目標(biāo)密集的環(huán)境下,采用舊航跡的預(yù)測航跡和
新航跡的濾波航跡作為關(guān)聯(lián)樣本,并將航跡關(guān)聯(lián)問題轉(zhuǎn)換為最優(yōu)分配問題,在對一定長度的關(guān)聯(lián)樣本進(jìn)行綜合處理后,得到了最終的關(guān)聯(lián)航跡對。因此,與前人采用單個量測點和單個預(yù)測點作為關(guān)聯(lián)樣本相比,本文選擇的樣本更加合理。仿真結(jié)果表明:在一定條件下,本文的方法更加簡單有效。然而,本文的研究只是基于最基本的彈道模型,并未考慮目標(biāo)機(jī)動的情況,因此,下一步將研究在目標(biāo)機(jī)動大、中斷時間長、時效性要求較高情況下的中斷航跡關(guān)聯(lián)方法。
參考文獻(xiàn):
[1]Ashraf M. A New Nearest-neighbor Association Approach Based on Fuzzy Clustering[J]. Aerospace Science and Technology, 2013, 26(1): 87-97.
[2]Jiang X, Harishan K, Tharmarasa R, et al. Integrated Track Initialization and Maintenance in Heavy Clutter Using Probabilistic Data Association[J]. Signal Processing, 2014, 94: 241-250.
[3]Li Z, Chen J, Gu Y, et al.Small Moving Infrared Space Target Tracking Algorithm Based on Probabilistic Data Association Filter[J]. Infrared Physics and Technology, 2014, 63: 84-91.
[4]Li L, Xie W. Bearings-only Maneuvering Target Tracking Based on Fuzzy Clustering in a Cluttered Environment[J]. AEU-International Journal of Electronics and Communications, 2014, 68(2): 130-137.
[5]Ashraf M. Fuzzy Track-to-track Association and Track Fusion Approach in Distributed Multisensor-multitarget Multiple-attribute Environment[J]. Signal Processing, 2007, 87(6): 1474-1492.
[6]Mucci R, Arnold J, Bar-Shalom Y. Track Segment Association with a Distributed Field of Sensors[J]. Acoustical Society of America, 1985, 78(4): 1317-1324.
[7]齊林, 王海鵬, 熊偉, 等. 基于先驗信息的多假設(shè)模型中斷航跡關(guān)聯(lián)算法[J]. 系統(tǒng)工程與電子技術(shù), 2015, 37(4): 732-739.
[8]杜漸, 夏學(xué)知. 面向航跡中斷的模糊航跡關(guān)聯(lián)算法[J]. 火力與指揮控制, 2013, 38(5): 68-71,76.
[9]齊林, 王海鵬, 劉瑜. 基于統(tǒng)計雙門限的中斷航跡配對關(guān)聯(lián)算法[J]. 雷達(dá)學(xué)報, 2015, 4(3): 301-308.
[10]俞建國, 劉梅, 陳錦海. 彈道目標(biāo)航跡片段關(guān)聯(lián)及優(yōu)化[J]. 航空學(xué)報, 2011, 32(10): 1897-1904.
[11]郭躍, 劉新學(xué), 王才紅. 混合坐標(biāo)系下跟蹤自由段彈道導(dǎo)彈的IMM-UPF算法研究[J]. 彈道學(xué)報, 2015, 27(1): 12-17,23.
[12]趙艷麗, 李宏, 高向東, 等. 不同坐標(biāo)系下中段彈道目標(biāo)跟蹤算法研究[J]. 現(xiàn)代雷達(dá), 2011, 33(5): 54-59.
[13]秦永元, 張洪鉞, 王叔華. 卡爾曼濾波與組合導(dǎo)航原理[M]. 西安: 西北工業(yè)大學(xué)出版社, 2004.
[14]司學(xué)慧, 李小兵, 張彥, 等. 基于平方根UKF的多傳感器融合再入段目標(biāo)跟蹤研究[J]. 2012, 34(2): 303-306.
[15]徐長愛, 李尚生, 殷勇, 等. 基于粒子濾波的彈道目標(biāo)跟蹤[J]. 電光與控制, 2008, 15(10): 81-83,96.
[16]劉華, 吳文, 王世元. 基于平方根CKF的多傳感器序貫式融合跟蹤算法[J]. 系統(tǒng)工程與電子技術(shù), 2015, 37(7):1494-1498.
[17]巫春玲, 韓崇昭. 基于平方根求積卡爾曼濾波器的彈道目標(biāo)跟蹤[J]. 控制與決策, 2010, 25(5): 721-724,729.
[18]董凱, 王海鵬, 劉瑜. 基于拓?fù)浣y(tǒng)計距離的航跡抗差關(guān)聯(lián)算法[J]. 電子與信息學(xué)報, 2015, 37(1): 50-55.
[19]滕鵬, 張君海, 于雷, 等. 基于粒子群優(yōu)化算法的協(xié)同空戰(zhàn)導(dǎo)彈目標(biāo)分配[J]. 空軍工程大學(xué)學(xué)報(自然科學(xué)版), 2008, 9(5): 24-28.
[20]王海鵬, 熊偉, 何友, 等. 集中式多傳感器群目標(biāo)灰色精細(xì)航跡起始算法[J]. 系統(tǒng)工程與電子技術(shù), 2011, 34(11): 2249-2255.
[21]宋強(qiáng), 熊偉, 馬強(qiáng). 基于目標(biāo)不變信息量的模糊航跡對準(zhǔn)關(guān)聯(lián)算法[J]. 系統(tǒng)工程與電子技術(shù), 2011, 33(1): 190-195.
(責(zé)任編輯: 尚彩娟)
Track Association Method of Unpowered Phase Interruption of Ballistic Missile
MAO Yi-fan, ZHANG Duo-lin, WANG Lu
(Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China)
Abstract:To solve the problem of difficult to determine the target before and after track interruption, track association problem of ballistic missile in unpowered flight phase is studied. When targets are concentrated, the predicted tracks of old tracks and the filtering tracks of new tracks are regarded as associating samples, the statistical distance between targets is calculated and taken as cost matrix, the track association problem is transformed into optimal allocation problem, particles warm optimization algorithm is used to solve the model, and the associated track pairs are obtained. Finally, the effectiveness of this approach is validated by the simulation.
Key words:ballistic missile; track segment; statistical distance; track association
文章編號:1672-1497(2016)02-0062-05
收稿日期:2016-01-01
作者簡介:毛藝帆(1988-),女,博士研究生。
中圖分類號:TJ761.3
文獻(xiàn)標(biāo)志碼:A
DOI:10.3969/j.issn.1672-1497.2016.02.013