基于信息熵的AUV地磁仿生導航方法
2016-06-21 01:25:56劉明雍
系統工程與電子技術 2016年6期
關鍵詞:區域
李 紅, 劉明雍, 劉 坤
(西北工業大學航海學院, 陜西 西安 710072)
?
基于信息熵的AUV地磁仿生導航方法
李紅, 劉明雍, 劉坤
(西北工業大學航海學院, 陜西 西安 710072)
摘要:針對地磁異常引起磁參量變化規律失真,導致自主水下航行器(autonomous underwater vehicle,AUV)導航搜索算法極易陷入局部極小的問題,提出了一種基于種群信息熵的進化搜索方法。該方法對地磁異常區域內信息熵的變化狀態進行觀測,通過預設的熵值門限值判斷搜索算法是否進入磁異常區域,采用最大概率選擇機制使算法跳出異常區域的干擾,避免算法陷入局部極小,并且對算法的收斂性進行證明。在未知環境下對AUV的導航搜索算法進行仿真,結果表明,利用熵值觀測和最大概率選取的方法能夠使得AUV在磁異常存在的情況下完成導航任務,驗證了算法的有效性。
關鍵詞:地磁導航; 仿生策略; 地磁異常; 局部極小
0引言
目前,在水下環境中還沒有一種導航方式能夠與空中的全球定位系統(global positioning system, GPS)媲美,導航問題是發展自主水下航行器(autonomous underwater vehicles,AUV)的關鍵所在[1]。水下導航常用慣性導航系統,但其存在定位誤差隨時間累積的缺陷,目前應用較廣的衛星導航系統也存在無線信號水中快速衰減的不足[2]。因此,利用地球磁場導航理論和方法引起了國內外研究機構和學者的廣泛關注。地磁導航由于具有無源隱蔽、全天候、全地域等特點,可以為水下航行器提供高精度的導航和定位信息,這是目前國內實現真正無源導航研究的熱點[3]。
當前常用的磁場導航方法是基于磁圖信息進行的匹配導航方法[4]。但是由于該方法受限于地磁基準圖的獲取,為此,研究不依靠任何事先儲存的磁場數據信息或磁圖信息進行導航方式是必要的。近些年來,眾多科學家對動物如何進行導航展開了研究,并且取得了許多研究成果。文獻[5]在一些海龜身上裝上GPS系統,將其帶到完全陌生的兩個地點釋放,然后跟蹤記錄海龜的游走軌跡。實驗表明,海龜可以在不熟悉的環境下利用地磁信息可以回到巢穴所在地。文獻[6]研究發現,在洋流情況下海龜可以利用地磁場實現接近直線的洄游。文獻[7]從量化的角度認為,信鴿歸巢過程中磁航向角的可控性與信鴿的磁敏感能力有關。文獻[8]從理論角度對地磁多參量導航線索的生物可用性進行了分析,并給出地磁多參量梯度夾角的邊界。
在未知地磁環境狀態下,且不依賴于地磁基準圖的存在,AUV如何進行目標位置的定位是研究的難點。文獻[9-10]從仿生學角度入手對該問題進行研究,并且提出了利用磁趨勢性進行導航的多目標搜索方法。但是之前的研究對磁異常影響下的AUV仿生導航方法考慮甚少。
本文針對AUV在地磁異常場環境中的導航問題,提出了一種基于種群信息熵的進化搜索方法。該方法針對地磁異常對導航搜索的影響,利用信息熵對地磁異常區域進行檢測,采用最大概率選擇機制,實現對導向動作的選取,通過對AUV未知地磁環境導航的仿真分析,表明AUV通過與環境的交互作用,最終完成了在未知地磁環境下的導航任務。
1問題描述
二維平面內,考慮AUV具有如下的運動方程:

(1)
式中,ΔT表示采樣周期;k表示航行器運行的某一時刻(k可取0,1,2,…,N-1);v(k)表示運動速度;θ(k)表示航向角。假定航行器在ΔT內進行勻速運動,則v(k)可以用常量V表示,則式(1)簡化為下式:
(2)
式中,L表示運動步長,L=V×ΔT。
1.1基于地磁分量的導航搜索
地球磁場是一個包含多個參量的混合場,每個參量都有其自身的變化規律[11]。從仿生角度來講,地磁導航過程表現為地磁場多個參量從起始位置到達各自目標收斂的過程[9]。因此,一個具有n個地磁決策變量、m個目標函數的多目標搜索問題可表述為:參量分布規律未知情況下,地磁場分量向給定目標值收斂的過程,表示如下:
(3)

在無先驗基準地磁圖的情況下,針對目標位置的磁趨勢性,以目標位置與當前位置磁場分量的差值作為導航運動的反饋信息,即通過磁分量誤差值表征對目標值的無限逼近,可表示為
(4)
1.2磁異常對導航搜索的影響
磁異常是指磁體產生的磁場疊加在地磁場之上而引起的地磁場的畸變[12]。

(5)
式中,?B為異常區域的異常幅度。
搜索算法中目標函數由于磁異常的存在使得目標函數可以表示為
(6)
結合式(4)和式(6)可知,
(7)
由此可知,?B的存在對地磁場原有參量產生擾動,則有ξ>ε 使得各地磁參量搜索空間將形成范圍、強度不同的極值區域,表現為導航搜索中的局部極小問題。
2磁異常影響下的導航搜索方法
為了克服磁異常影響下進化算法陷入局部極小的問題,整個導航搜索過程主要分為兩個任務,這兩個任務的具體實現過程如下:
(1) 第一個任務:判斷是否進入磁異常區域
由于異常區域會引起地磁分量的作用規律失真,進而使得導航路徑在異常區域內出現“繞圈”等現象,此時運動航向的盲目性增大。故此,引入信息熵,通過計算運動狀態的熵值,來衡量AUV對運動狀態的傾向程度。在信息論中,熵用來表征對某事件不確定程度的度量。信息量越少,不確定性越大,熵值就越大。故此,利用種群的信息熵對磁異常環境進行檢測,以此判斷算法是否進入磁異常區域, 即滿足式(8),則認為算法陷入磁異常區域。
(8)
式中,Hth為熵值門限,取Hth=1.8。
(2) 第二個任務:判斷是否到達目標位置
(9)
式中,ε是給定的趨于0的小數;T為預設目標范圍。
3導航算法步驟
基于種群信息熵的進化搜索的具體實現流程如下:
步驟 1初始化
設置AUV起始位置和終止位置的地磁參量Bo和Bt、運動步長、終止范圍及搜索算法相關參數。導航搜索過程中以航向角作為進化個體,個體集合為
(10)
式中,m為個體空間中的個數;Δθ為采樣間隔。種群空間由個體集合中的個體組成,種群為Q={θj|j=1,2,…,N},θj表示種群的第i個個體,θj=Δθ×i,i∈[1,m],N表示群體規模大小。
步驟 2隨機選取航向角個體
從種群空間Q中隨機選擇一個個體θi(k)執行,由于一開始種群中個體的取向信息是未知的,所以選取各個體行為初始概率均相等,即
(11)
選取各個體行為初始概率相等,意味著搜索初期,AUV不含有任何預定的方向決策。隨著導航進程的進行,種群個體中具有較大概率值的個體行為被選中的頻次越高,則k時刻,種群第i個樣本θi被選中的概率為
(12)
步驟 3種群的更新
由于AUV當前位置是由前一時刻的位置和種群中的航向角個體共同決定的,搜索結果的優劣很大程度上取決于航向角的選取。種群的一個個體被選中,AUV進行行為操作,利用評價函數進行環境反饋,以實現對種群熵值的更新。因此,種群中的樣本更新可按照下述規則進行:
(13)
(14)
步驟 4種群熵值更新
執行一次操作后,由地磁傳感器獲得當前位置的環境信息,得到當前狀態Bk,并計算種群的信息熵,即
(15)
這里的熵H表征了種群中個體的不確定性程度,信息熵的減少是進化過程的顯著特征。若種群熵值在一段時間內異常增大,說明算法進入磁異常區域
步驟 5當判斷算法進入磁異常區域時,采用最大概率選擇方式,選取進程中被保留下來的好的航向角中的概率最大航向角θki,即為
(16)
步驟 6k=k+1,重復步驟2~步驟5,直到滿足條件式(9)時終止。
4算法收斂性證明
文獻[13-14]已對最優個體保留進化算法的全局收斂性進行證明,在基礎之上,本文給出搜索進程中航向角個體的收斂性證明。
定理 1當k→∞時,航向角個體的選取依據概率1選取具有最大概率的操作行為
(17)
證明假定k時刻,導航進程中選取操作行為θki,則
(1) 若θ(k)=θki,由式(13)得
(18)
(2) 若θ(k)=θki,由式(14)得
(19)
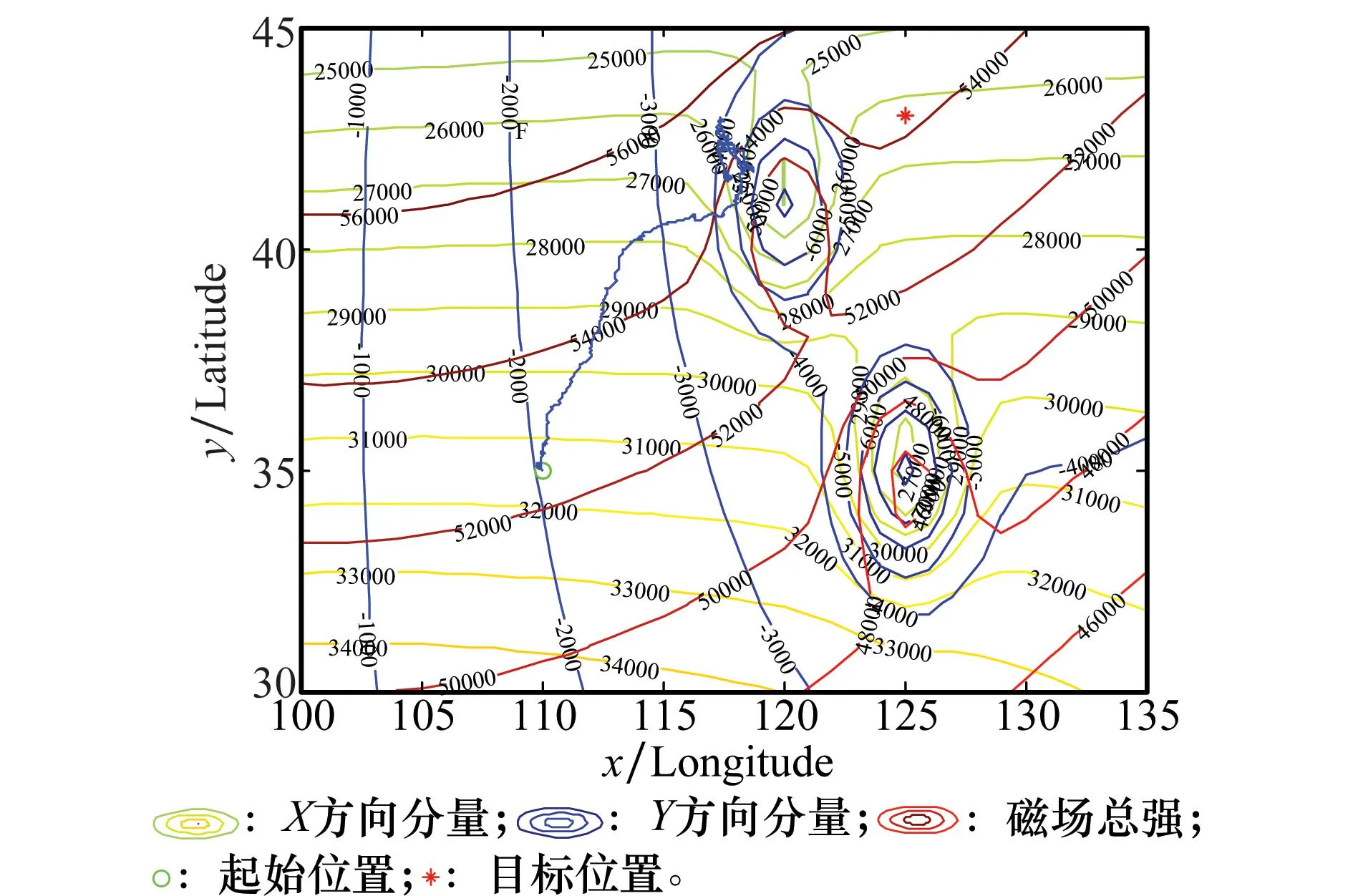
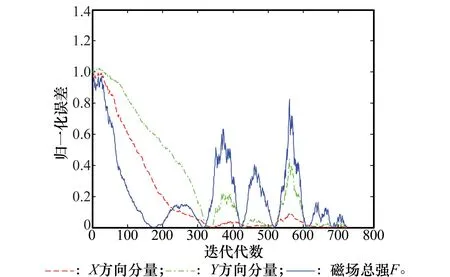
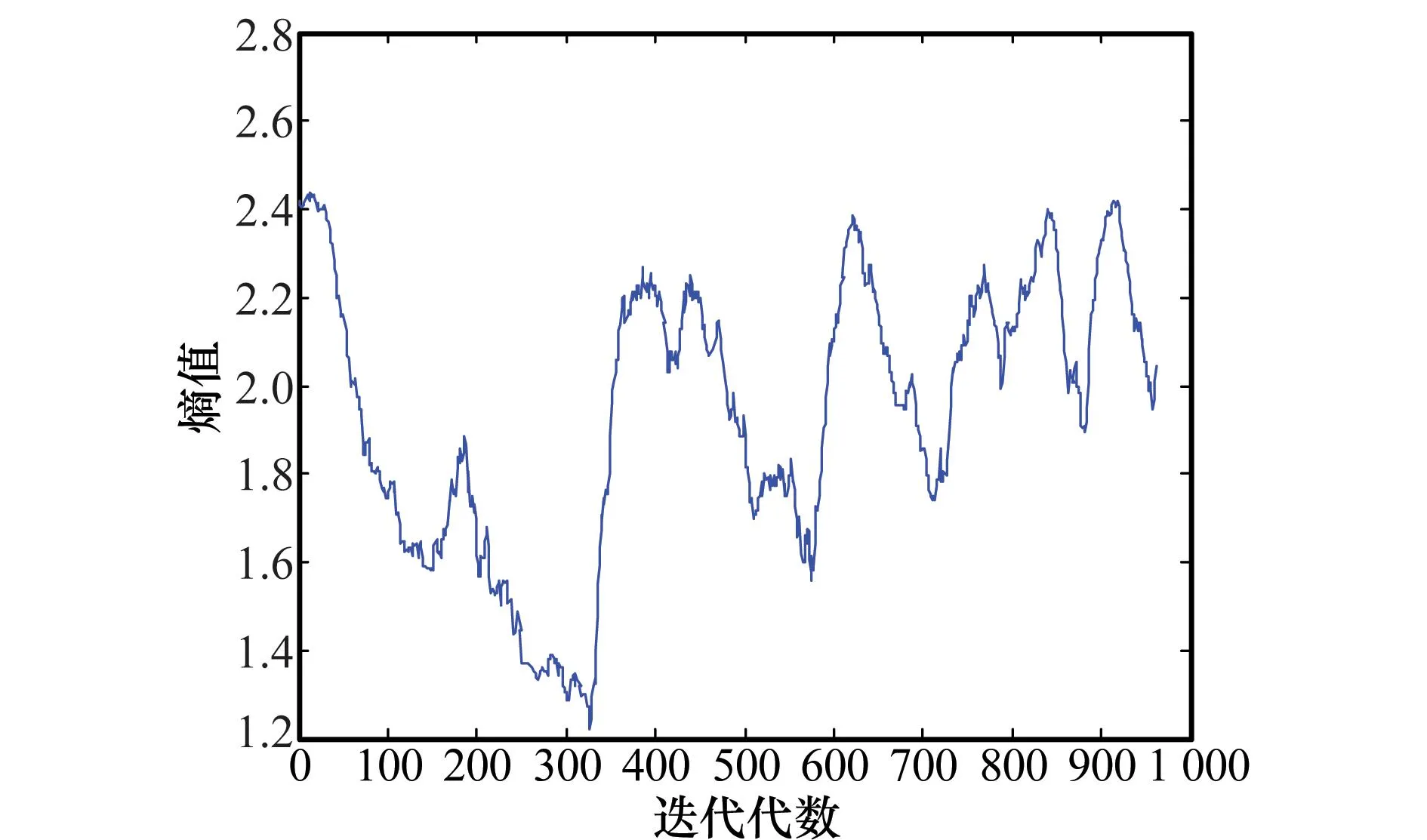
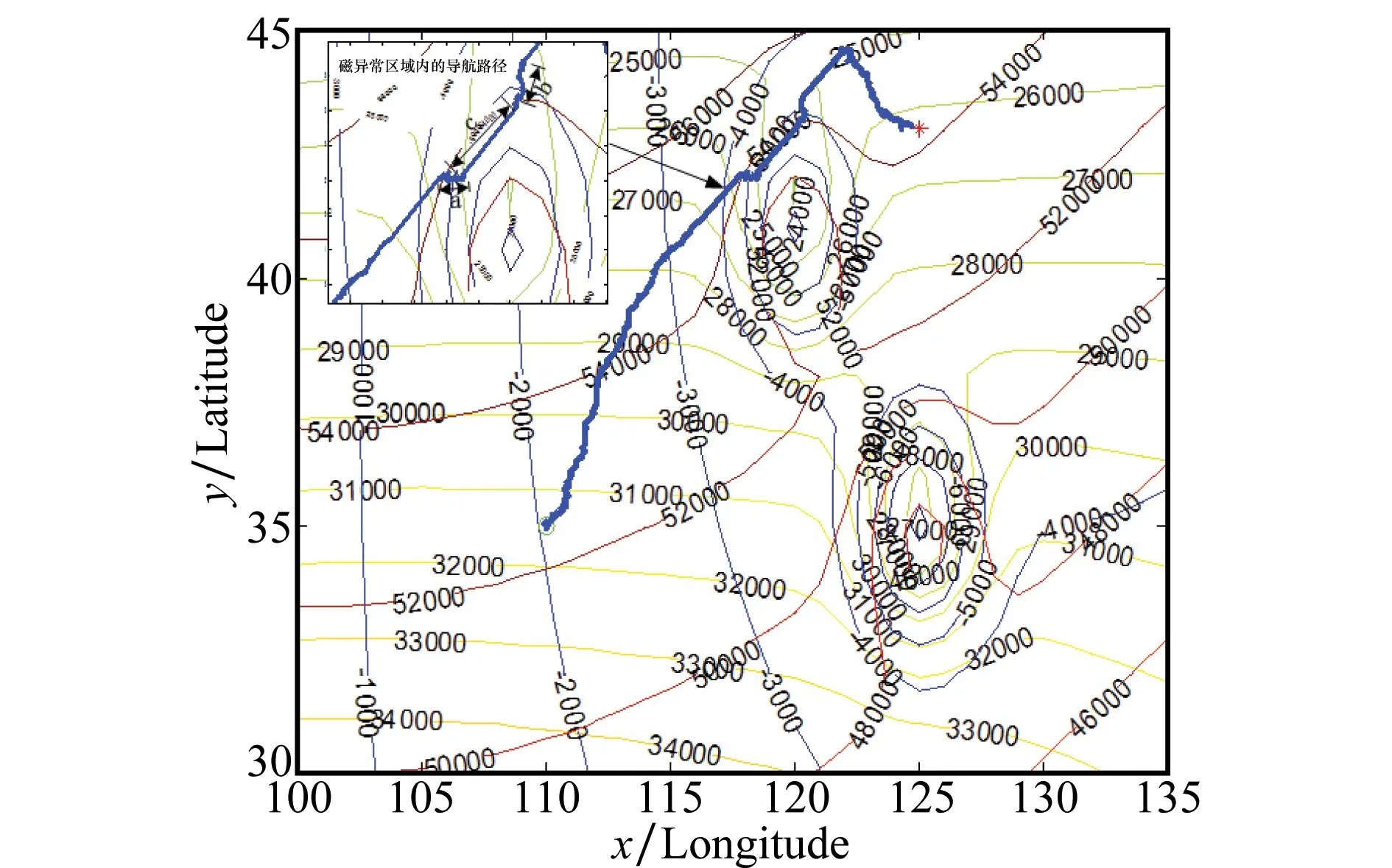
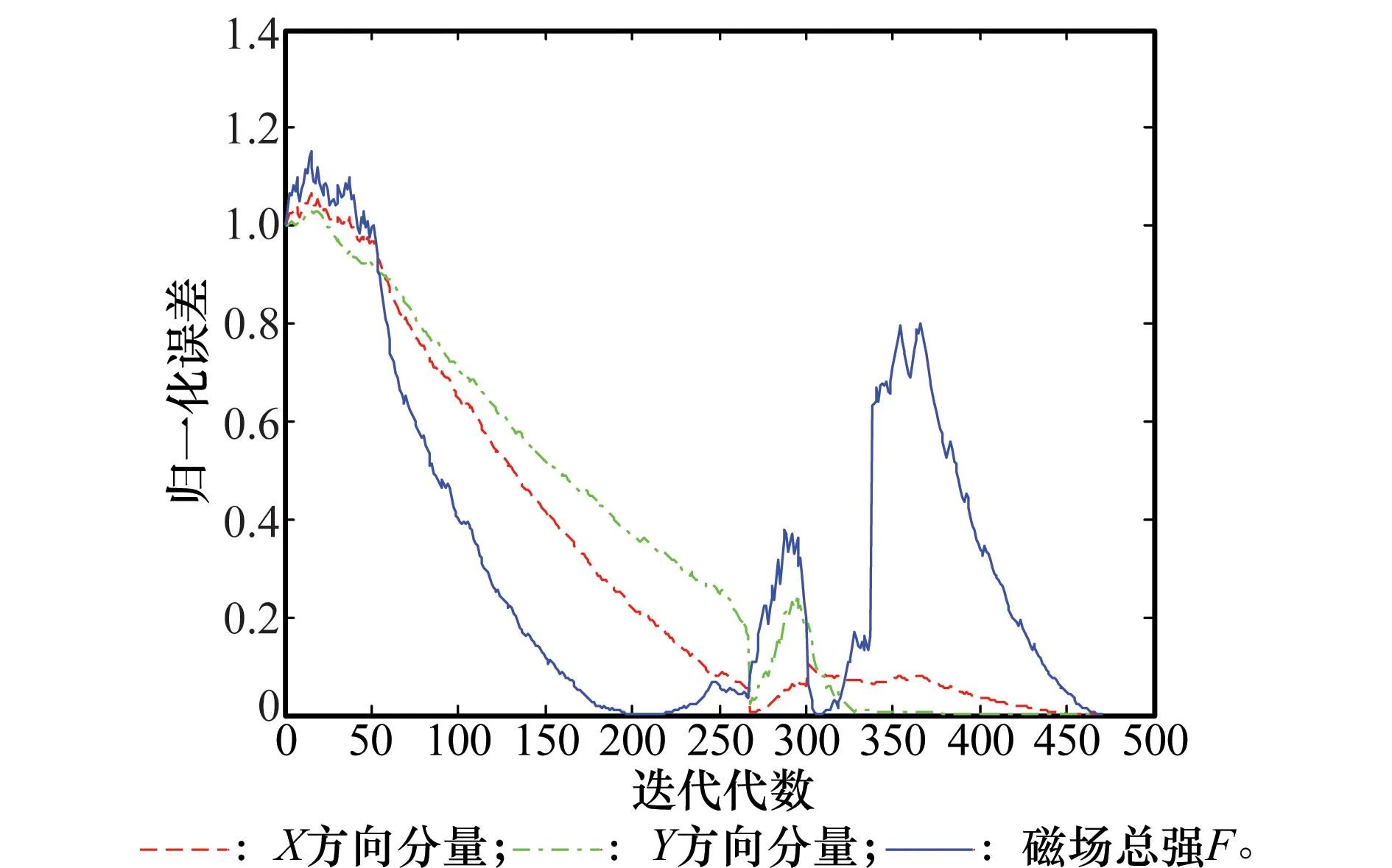
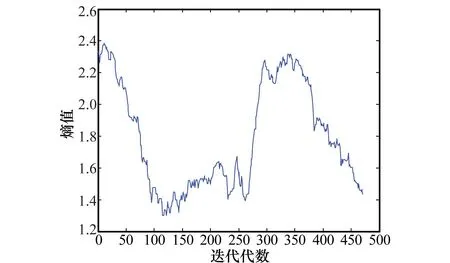
因為0 證畢 定理 2當k→∞時,種群熵收斂至極小,即 (20) 證明由于導航搜索過程中種群中的個體是一個不斷進化的過程,由于磁異常的存在致使搜索路徑出現抖動和繞圈等運動現象,說明種群熵的不確定性增大,因此,采用最大概率的個體使其跳出異常區域的影響。 (21) 證畢 5仿真分析 為了驗證算法的可行性,通過Matlab2012a調用WMM2010中的磁場參量數據,得到每一步測量點的地磁參量數據,用以模擬地磁傳感器一步一測量的狀態。選取地磁場X方向分量、Y方向分量、總強度F作為環境特征參量,記為B=∶{Bx,By,BF}。環境中設置一個恒定的干擾區域,即為磁異常干擾區域。AUV近似為一個質點,其初始位置設置為綠色的小圈(“○”),目標點設為紅色的星型(“*”)。 5.1仿真參數設置 參數設置:種群規模N=50,Δθ=30°,m=12,運動步長L=500 m,ε=0.000 7。 5.2仿真結果 利用文獻[10]的導航搜索算法解決導航搜索進程中磁異常干擾的問題時,仿真結果發現由于磁參量的變化規律受到影響,使得AUV的導航進程發生了變化,搜索算法陷入了局部極小而無法到達目標值,如圖1所示。 圖1 導航搜索路徑 圖1導航搜索結果表明,文獻[10]的導航搜索算法未考慮到磁異常對AUV導航進程的影響,致使AUV進入磁異常區域時,呈現出“繞圈”現象而無法導航預設目標位置。圖2顯示了地磁參量的變化曲線,由結果可以看出,隨著導航進程的進行,搜索算法陷入了局部極小。 圖2 地磁三參量的收斂曲線(1) 圖3顯示了該導航搜索算法中種群熵的變化曲線,通過觀察種群熵值的變化狀態可以看出,迭代步數在320步之前,種群熵值呈現明顯下降趨勢,表明進程中對航向角的進化,方向的傾向性顯著,故此熵值下降,但在320步之后熵值變化極度異常,熵值3次超過2,由此可見,由于環境因素的變化致使AUV在行進中失去了航向的目標傾向性,其導向的不確定性增大,故此,熵值在磁異常區域時變化異常。 圖3 磁異常存在下的種群熵變化曲線 為了驗證基于種群信息熵在磁異常存在下的AUV地磁仿生導航搜索方法的有效性,仿真環境一致,運動參數不變的條件下進行導航搜索,如圖4所示。由圖4可知,導航搜索過程是一個不斷探索和鞏固的過程,通過引入信息熵能夠保證對環境做出合理的判斷,隨即采用最大概率選擇機制,實現對導向動作進行選取,使算法擺脫異常區域的干擾,得以逃離異常區域,最終到達目標點,完成導航任務。 圖4 導航搜索路徑 圖5顯示了地磁參量的變化曲線,由結果可以看出地磁三參量的收斂過程。圖中迭代步數在260~300和350~3 400時參量變化曲線異常,均有增長趨勢,在圖4的導航路徑中表現為a,b兩段,說明導航搜索進程極易陷入局部極小解。故此,對其進行方向導引,即圖4中的c段操作。從地磁三參量的總體收斂狀態可以看出,導航搜索進程中雖然呈現出不一致性,但是三參量最終能同時同地收斂至目標參量,即目標預設位置。 圖5 地磁三參量的收斂曲線(2) 圖6顯示了導航進程中種群熵的變化曲線,從整個熵值的變化過程可以看出,迭代步數在260~360步時熵值急速增大,說明在此期間AUV的航向不確定性增大,直至采用最大概率選擇機制,對導向進行動作選取后,熵值下降直至極小。 對比上述仿真結果圖1與圖3可以看出,本文利用信息熵對地磁異常區域進行檢測,采用最大概率選擇機制,實現對導向動作的選取,最終完成了在未知地磁環境下的導航搜索任務,克服了地磁異常對AUV導航搜索干擾。 圖6 磁異常存在下的種群熵變化曲線 6結論 本文提出了一種基于種群信息熵的進化搜索方法用于實現AUV的地磁導航。AUV在導航搜索的進程中不斷與環境進行交互,利用信息熵對地磁異常區域進行檢測,并且采用最大概率選擇機制,實現對導向動作的選取,通過仿真結果的對比分析可知,本文提出抗地磁異常干擾的導航搜索算法的有效性,能夠確保AUV在未知地磁環境下完成導航任務。 參考文獻: [1] Stutters L, Liu H, Tiltman C, et al. Navigation technologies for autonomous underwater vehicles[J].IEEETrans.onSystems,Man,andCyberneticsPartC:ApplicationandReviews, 2008, 38(4): 581-589. [2] Li X C, Zhang H X, Zhang S B. Thedevelopment of geomagnetic navigation technology[J].AerodynamicMissileJournal, 2013, 10(10): 80-83.(李興城, 張慧心, 張雙彪. 地磁導航技術的發展現狀[J].飛航導彈, 2013, 10(10): 80-83.) [3] Cai Y Y, Wei H P, Ren Z X. The review of underwater geomagnetic navigation technology[J].NationalDefenseScience&Technology, 2007 (3): 28-29.(蔡兆云, 魏海平, 任治新. 水下地磁導航技術研究綜述[J].國防科技, 2007 (3): 28-29.) [4] Liu F, Zhou X G, Yang Y, et al. Geomagnetic matching positioning technology[J].JournalofChineseInertialTechnology, 2007, 15(1): 59-62.(劉飛, 周賢高, 楊曄, 等. 相關地磁匹配定位技術[J].中國慣性技術學報, 2007, 15(1): 59-62.) [5] Benhamou S, Sudre J, Bourjea J, et al. The role of geomagnetic cues in green turtle open sea navigation[J].PLoSOne, 2011, 6(10): 266-272. [6] Lohmann K J. Animal behaviour: magnetic-field perception[J].Nature, 2010, 464: 1140-1142. [7] Nehmzow U.Scientificmethodsinmobilerobotics-quantitativeanalysisofagentbehaviour[M].USA:Springer Verlag, 2006. [8] Bostr?m J E, ?kesson S, Alerstam T. Where on earth can animals use a geomagnetic bi-coordinate map for navigation?[J].Ecography, 2012,35: 1039-1047. [9] Liu M, Liu K, Yang P, et al. Bio-inspired navigation based on geomagnetic[C]∥Proc.oftheIEEEInternationalConferenceonRoboticsandBiomimetics, 2013: 2339-2344. [10] Liu M, Li H, Liu K. Geomagnetic navigation of AUV without a priori magnetic map[C]∥Proc.oftheIEEEOceans, 2014: 1-5. [11] Goldenberg F. Geomagnetic navigation beyond the magnetic compass[C]∥Proc.oftheIEEE/IONPlans, 2006: 684-694. [12] Wu Z C. Technology and application of magnetic gradient tensor[D].Wuhan: China University of Geosciences,2008.(吳招才.磁力梯度張量技術及其應用研究[D]. 武漢: 中國地質大學,2008.) [13] Cai J X, Ruan X G. Skinner operant conditioning learning model based on genetic algorithm[J].SystemsEngineeringandElectronics, 2011, 33(6): 1370-1376.(蔡建羨,阮曉鋼.基于遺傳算法的Skinner操作條件反射學習模型[J].系統工程與電子技術, 2011, 33(6): 1370-1376.) [14] Dai X M, Zou R M, Rong S, et al. Convergence properties of non-crossover genetic algorithm[C]∥Proc.ofthe4thWorldCongressonIEEEIntelligentControlandAutomation, 2002: 1822-1826. 李紅(1985-),女,博士研究生,主要研究方向為地磁仿生導航、進化搜索。 E-mail:mydreamli_hong@126.com。 劉明雍(1971-),男,教授,主要研究方向為自主水下航行器與自主移動機器人、先進控制理論與應用、信息融合理論與應用。 E-mail:liumingyong@nwpu.edu.cn 劉坤(1984-),男,博士研究生,主要研究方向為地磁仿生導航、多目標優化。 E-mail:liukunkmz@126.com Navigation method of autonomous underwater vehicle based on information entropy LI Hong, LIU Ming-yong, LIU Kun (CollegeofMarineScienceandTechnology,NorthwesternPolytechnicalUniversity,Xi’an710072,China) Abstract:For the local optimal problem of the search algorithm with the disturbance by geomagnetic anomaly, a novel navigation method for autonomous underwater vehicle (AUV) is proposed from the information entropy. This method utilizes the variation of headings to represent the entropy values, and judges whether the evolution algorithm is trapped into the geomagnetic anomaly area based on the preset threshold. If the algorithm is trapped into the geomagnetic anomaly area, the method adopting the direction with the maximum probability mechanism is used to avoid trapping into the local minimum point. Experimental results and their analysis preliminarily demonstrate that the proposed method is able to achieve the navigational task. Keywords:geomagnetic navigation; bio-inspired navigation; geomagnetic anomaly; local optimal 收稿日期:2015-06-12;修回日期:2015-09-24;網絡優先出版日期:2015-12-19。 基金項目:國家自然科學基金(51179156,51379176)資助課題 中圖分類號:TP 18 文獻標志碼:A DOI:10.3969/j.issn.1001-506X.2016.06.26 作者簡介: 網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20151229.1755.012.html

猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15