基于到達(dá)時間和方位角的固定單站無源定位仿真分析
2016-06-18 05:42:57郭徽東
艦船電子對抗 2016年2期
關(guān)鍵詞:卡爾曼濾波
方 鋒,郭徽東
(1.解放軍92985部隊,廈門 361100;2.解放軍92403部隊,福州 350007)
?
基于到達(dá)時間和方位角的固定單站無源定位仿真分析
方鋒1,郭徽東2
(1.解放軍92985部隊,廈門 361100;2.解放軍92403部隊,福州 350007)
摘要:基于輻射源的信號到達(dá)時間 (TOA)和到達(dá)方向(DOA)信息,利用修正增益擴(kuò)展卡爾曼濾波方法,對固定單站偵察設(shè)備的空中和海上目標(biāo)進(jìn)行無源定位,仿真計算驗證算法的有效性。
關(guān)鍵詞:到達(dá)時間;到達(dá)方位;無源定位;修正增益擴(kuò)展卡爾曼濾波器
0引言
由于無源定位具有被動偵測、抗干擾能力強(qiáng)等特點,在軍事上具有較為廣泛的應(yīng)用,輻射源的無源定位主要有純方位無源定位、到達(dá)時間和方位角信息無源定位等,純方位無源定位嚴(yán)重依賴目標(biāo)方位角變化率,對固定單站或慢速運動目標(biāo)的濾波定位容易發(fā)散,無法收斂[1-4]。充分利用固定單站偵察雷達(dá)的到達(dá)時間(TOA)和方位角(DOA)等目標(biāo)信息,可提高定位時效和目標(biāo)預(yù)警區(qū)域,提供較大范圍、具有參考價值的的目標(biāo)態(tài)勢信息。
目前,對基于TOA和DOA的無源定位與跟蹤的研究主要應(yīng)用于空中目標(biāo)輻射源定位,對長時大范圍的固定單站海上目標(biāo)大范圍預(yù)警并未進(jìn)行討論計算。本文在測向測時定位原理的基礎(chǔ)上,利用運動輻射源的TOA和DOA測量信息,通過擴(kuò)展增益卡爾曼濾波MGEKF分別對空中、海上機(jī)動目標(biāo)的無源定位進(jìn)行計算分析。
1單站定位
在實際工程應(yīng)用上,擴(kuò)展卡爾曼濾波(EKF)是無源定位算法中較為普遍的方法。在單站無源定位的EKF算法中,增加目標(biāo)輻射源的DOA信息能夠更好地解決無源定位的非線性問題,提高固定單站對運動輻射源的定位精度,縮短收斂時間[1-2]。
1.1狀態(tài)方程
為方便起見,目標(biāo)做固定航向的勻速運動,具有一定的加速度噪聲,目標(biāo)為輻射周期T恒定的脈沖信號,被動偵察設(shè)備在周期內(nèi)接收N個脈沖為完成一次偵測。
設(shè)Xk=[xk,yk,zk,vxk,vyk,vzk,NTr]T為K時刻狀態(tài)矢量,則其狀態(tài)方程為:
(1)

1.2測量方程的建立
(2)
將上式寫成如下形式:
Zk?HkXk+Mk+Vk
(3)
其中:
(4)

根據(jù)方位角βk、俯仰角εk和時間差τk的定義,可得到測量方程:
(5)
式中:δβk為到達(dá)方位誤差;δτk為到達(dá)時間誤差。
1.3測量方程線性化
(6)
式中:e為高階項。
(7)

對于τk測量方程,Taylor展開后,忽略二次項,可得:

(8)
于是有:

(9)

(10)
綜上所述,由式(5)、式(10)建立測量量與目標(biāo)狀態(tài)之間的偽線性方程,在偽線性方程基礎(chǔ)上,利用應(yīng)用修正增益的擴(kuò)展卡爾曼濾波(MGEKF)算法可以實時得到目標(biāo)狀態(tài)的濾波估計值。
2MGEKF濾波
修正增益的擴(kuò)展卡爾曼濾(MGEKF)解決了擴(kuò)展卡爾曼濾波算法的協(xié)方差容易病態(tài)、對初始狀態(tài)假定精度敏感等缺點[4],該濾波方法在實踐中被證明是一種對非線性系統(tǒng)較好的濾波算法。具體算法如下[1-2]:
(11)
(12)
(13)
(14)
(15)
(16)
3仿真分析
3.1空中目標(biāo)
為驗證算法的有效性,仿真中輻射源的參數(shù)設(shè)置同文獻(xiàn)[3]。空中輻射源起始位置:x0=100km,y0=100km,目標(biāo)運動速度v=200m/s,加速度噪聲方差為: σwx=σwy=0.01m/s2。輻射源脈沖周期T=1ms,采樣脈沖數(shù)N=1 000。假設(shè)偵察設(shè)備位于坐標(biāo)原點,方位和時延測量誤差分別為: σβ=1°,στ=10ns,采用MGEKF濾波算法對目標(biāo)進(jìn)行定位跟蹤,并做100次Monte-Carlo仿真,仿真結(jié)果見圖1~圖3。
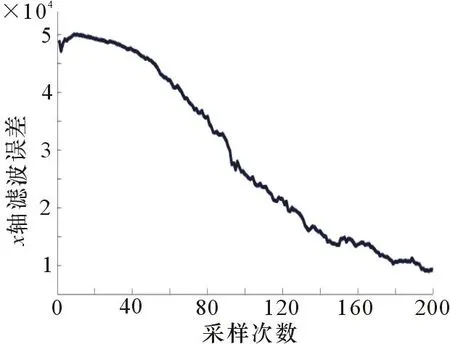
圖1 空中目標(biāo)跟蹤X軸濾波誤差
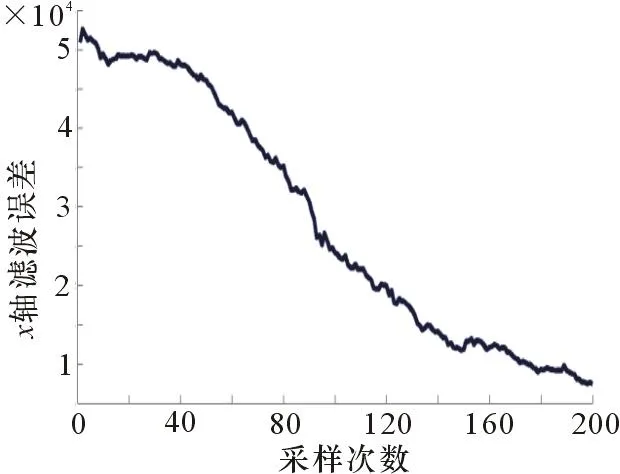
圖2 空中目標(biāo)跟蹤Y軸濾波誤差
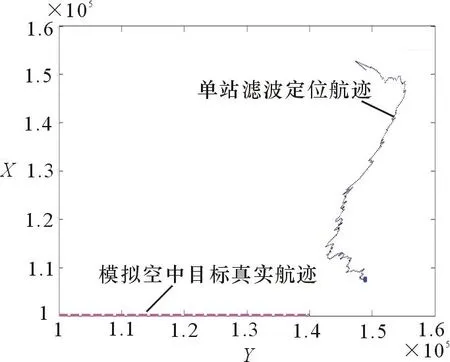
圖3 空中目標(biāo)跟蹤航跡比對圖
圖1為X軸濾波誤差,圖2為Y軸濾波誤差,采樣次數(shù)為200,圖3為實驗一目標(biāo)單站定位結(jié)果。由圖1~圖2可知,對空中目標(biāo)每隔1s進(jìn)行一次到達(dá)時間和方位測量,X、Y軸跟蹤誤差2min(120次)后達(dá)10km左右,穩(wěn)定跟蹤后位置誤差小于10km,可達(dá)到較為精確的跟蹤,定位誤差<10%。
3.2艦船目標(biāo)
水面目標(biāo)輻射源初始位置為:x0=180km,y0=100km。運動狀態(tài):v=10m/s,航向60。輻射源脈沖周期T=1ms,采樣脈沖數(shù)N=1 000×120。假設(shè)偵察設(shè)備位于坐標(biāo)原點,方位和時延測量誤差分別為: σβ=1°,στ=10ns,采用MGEKF濾波算法對目標(biāo)進(jìn)行定位跟蹤,并做100次Monte-Carlo仿真,仿真結(jié)果見圖4~圖7。

圖4 海上目標(biāo)跟蹤X軸濾波誤差
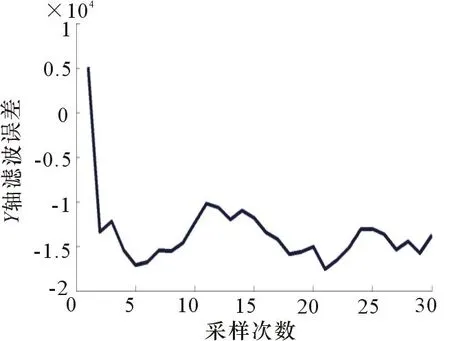
圖5 海上目標(biāo)跟蹤Y軸濾波誤差
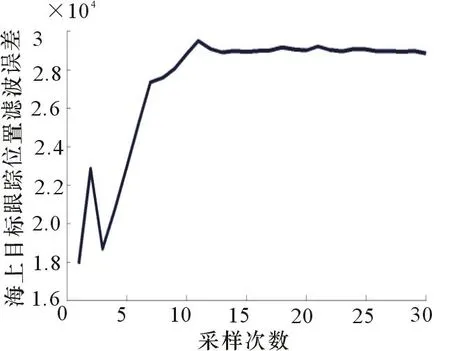
圖6 海上目標(biāo)跟蹤位置濾波誤差
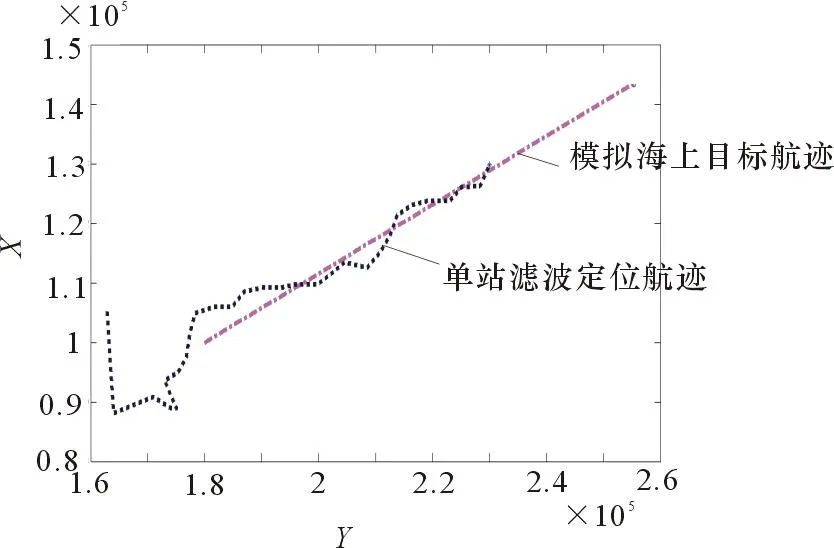
圖7 海上目標(biāo)跟蹤航跡比對圖
圖4為X軸濾波誤差,圖5為Y軸濾波誤差,圖6為海上目標(biāo)跟蹤位置濾波誤差,采樣次數(shù)為30次;圖7為海上目標(biāo)單站定位結(jié)果。由圖4~圖7可知,對海上慢速目標(biāo)每隔2min進(jìn)行一次到達(dá)時間和方位測量,X、Y軸跟蹤60min(30次)后達(dá)15~25km左右,穩(wěn)定跟蹤后位置誤差約30km,可達(dá)到較為精確的跟蹤,定位誤差約15%;從仿真計算結(jié)果看,X、Y軸跟蹤誤差15次后(約30min)距離誤差基本穩(wěn)定,目標(biāo)航跡動態(tài)穩(wěn)定,可判斷目標(biāo)運動趨勢。
綜合空中、海上目標(biāo)單站無源定位理論仿真結(jié)果,在一般方位誤差條件下(方位和到達(dá)時間測量誤差分別為1°和10ns),對空中目標(biāo)定位誤差<10%(采樣時間2min),對海上目標(biāo)定位誤差約15%(采樣時間30~60min),可為目標(biāo)區(qū)域預(yù)警和態(tài)勢預(yù)判提供概略信息。
4結(jié)束語
本文利用偵察雷達(dá)偵測目標(biāo)的到達(dá)時間和方位角信息,建立無源定位系統(tǒng)模型、目標(biāo)運動狀態(tài)方程,利用修正增益擴(kuò)展卡爾曼濾波實時得到目標(biāo)狀態(tài)的濾波估計值。在一般方位誤差條件下,對于空中目標(biāo)的定位,定位時間大約為2min,對于海上遠(yuǎn)距離目標(biāo)的定位,定位時間大約30~60min,經(jīng)過一定次數(shù)的迭代濾波,在較短時間內(nèi)可將定位誤差減小到10%~15%以內(nèi),可以為其他傳感器平臺接力定位跟蹤提供預(yù)警。
參考文獻(xiàn)
[1]楊莘元,鄭思海.基于運動輻射體TOA和DOA測量的單站被動定位算法[J].電子學(xué)報,1996,24(12):66-69.
[2]焦淑紅,劉申建,司錫才.機(jī)動運動輻射源的單站無源定位自適應(yīng)算法[J].系統(tǒng)工程與電子技術(shù),1996(4):7-9.
[3]喬梁.基于TDOA和DOA測量的單站無源定位方法[J].吉首大學(xué)學(xué)報(自然科學(xué)版),2006(11):60-63.
[4]李宗華,郭福成,周一宇,孫仲康.測量TOA和DOA的單站無源定位跟蹤可觀測條件[J].國防科技大學(xué)學(xué)報,2004(2):30-34.
Simulation Analysis of Single Fixed-station Passive Location Based on
TOA and DOA FANG Feng1,GUO Hui-dong2
(1.Unit 92985 of PLA,Xiamen 361100,China;2.Unit 92403 of PLA,Fuzhou 350007,China)
Abstract:Based on the time difference of arrival (TOA) and the direction of arrival (DOA) of the emitter,this paper uses modified gain extended Kalman filter (MGEKF) algorithm to perform passive localization of air and sea targets in the reconnaissance equipments of fixed single station,and validates the validity of the algorithm.
Key words:time of arrival;direction of arrival;passive location;modified gain extended filter
收稿日期:2015-11-02
中圖分類號:TN971.1
文獻(xiàn)標(biāo)識碼:A
文章編號:CN32-1413(2016)02-0010-04
DOI:10.16426/j.cnki.jcdzdk.2016.02.003
猜你喜歡
測控技術(shù)(2018年11期)2018-12-07 05:49:38
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36