頸椎C2~7三維有限元模型的建立與最優角度牽引仿真研究>*
2016-06-17 07:47:43劉治華許偉超張新民劉博見
鄭州大學學報(醫學版) 2016年3期
劉治華,許偉超,張新民,劉博見
1)鄭州大學機械工程學院 鄭州 450001 2)鄭州飛龍醫療設備有限公司 鄭州 450001
頸椎C2~7三維有限元模型的建立與最優角度牽引仿真研究>*
劉治華1)△,許偉超1),張新民2),劉博見1)
1)鄭州大學機械工程學院 鄭州 4500012)鄭州飛龍醫療設備有限公司 鄭州 450001
△男,1971年7月生,博士,副教授,研究方向:生物力學、機電系統設計與控制,E-mail:liuzhihua@zzu.edu.cn
關鍵詞頸椎;有限元模型;逆向工程;最優角度
摘要目的:建立頸椎C2~7三維有限元模型,探討不同角度牽引對頸椎間盤的影響。方法:對一名30歲健康成年男性志愿者的頸椎進行CT掃描成像,應用Mimics 10.01、Geomagic Studio逆向工程軟件生成頸椎間盤并建立實體CAD模型,然后導入Ansys Workbench 15.0軟件得到頸椎C2~7三維有限元模型并進行有效性驗證,在所建模型上添加載荷及約束,模擬人體平躺時0~20°變角度牽引,得出牽引治療中各段頸椎間盤的最優牽引角度。結果:成功建立了C2~7三維有限元模型。同一大小牽引力作用下,頸椎間盤C2~3、C3~4、C4~5、C5~6、C6~7的最優牽引角度分別為2°、4°、8°、13°、17°。結論:建立了有效的頸椎C2~7三維有限元模型。
頸椎是人體連接頭顱和胸腰段脊柱的重要結構,是脊柱中活動量最大、運動頻率最高的節段[1]。頸椎病是臨床上的常見病,隨著社會競爭的日益激烈,工作學習壓力的進一步增大,其發病率也呈逐年遞增之勢。常見的頸椎生物力學研究分為兩類:計算機模擬(采用有限元分析的方法)和實驗生物力學研究(對真實的頸椎結構進行力學測試)。有限元分析的方法具有實驗時間短、費用少、力學性能測試全面及可重復實驗等優點,1972年Brekelmans等[2]首次將有限元的方法應用于生物力學領域,發展到今天有限元分析法已經取得了長足發展。該文基于CT圖片建立了精確度高、便于分析的頸椎C2~7三維有限元模型,并對模型的有效性進行了驗證,采用有限元的方法得出同一牽引力下,牽引角度變化對各節段頸椎間盤的影響規律,最終得到各段椎間盤的最優牽引角度,為新型頸椎牽引治療系統的開發提供依據。
1材料與方法
1.1數據來源無頸椎病史健康男性志愿者一名,30歲,漢族,身高175 cm,體重68 kg,采用美國GE公司生產的64排螺旋CT掃描機對其頸椎進行連續掃描,共獲取345層CT片,層厚0.483 mm,掃描數據以DICOM格式直接存儲。該志愿者的正、側位頸椎X線片見圖1。
圖1 正(A)、側(B)位頸椎X線片
1.2試驗設備計算機硬件Intel(R) Core(TM) i3-2120 CPU 3.30 GHz,6 G內存,NVIDIA GeForce GT620顯卡,1 G顯存,Windows 7 操作系統。醫學圖像處理軟件Mimics 10.01(Materialise公司,比利時),逆向工程軟件Geomagic Studio(Geomagic公司,美國),有限元分析軟件 Ansys Workbench 15.0(Ansys公司,美國)。
1.3頸椎C2~7三維有限元模型的建立及驗證
1.3.1頸椎C2~7三維有限元模型的建立將DICOM格式的CT圖片數據導入Mimics 10.01軟件,利用軟件自帶的閾值分割、區域增長、選擇性編輯等功能,將各節段椎骨連接部分手動分離并進行空洞填補,最后將編輯好的蒙罩進行3D轉化,生成頸椎椎骨面網格模型,再將生成的數據逐個導入Mimics軟件自帶的網格優化工具Magics中進行優化,見圖2。將以上生成的椎骨模型導入Geomagic Studio軟件,利用搭橋的方法在兩段椎骨間逆向生成頸椎間盤[3-4],利用Geomagic Studio中NURBS曲面功能將上述頸椎椎骨椎間盤模型逐個實體化,最終構建成實體CAD模型。在有限元分析軟件Ansys Workbench 15.0中將導入的以上椎骨部分分為皮質骨和松質骨,椎間盤分為纖維環和髓核,根據頸椎的實體解剖結構信息確定韌帶的主要分布位置,由Mimics軟件確定韌帶在頸椎模型上的具體分布坐標,利用Ansys Workbench 15.0自帶的link180單元來模擬韌帶只承受拉力不承受壓力和剪切力的特性。查找文獻[5-8],對所建模型賦予單元類型和材料屬性,見表1。定義接觸。
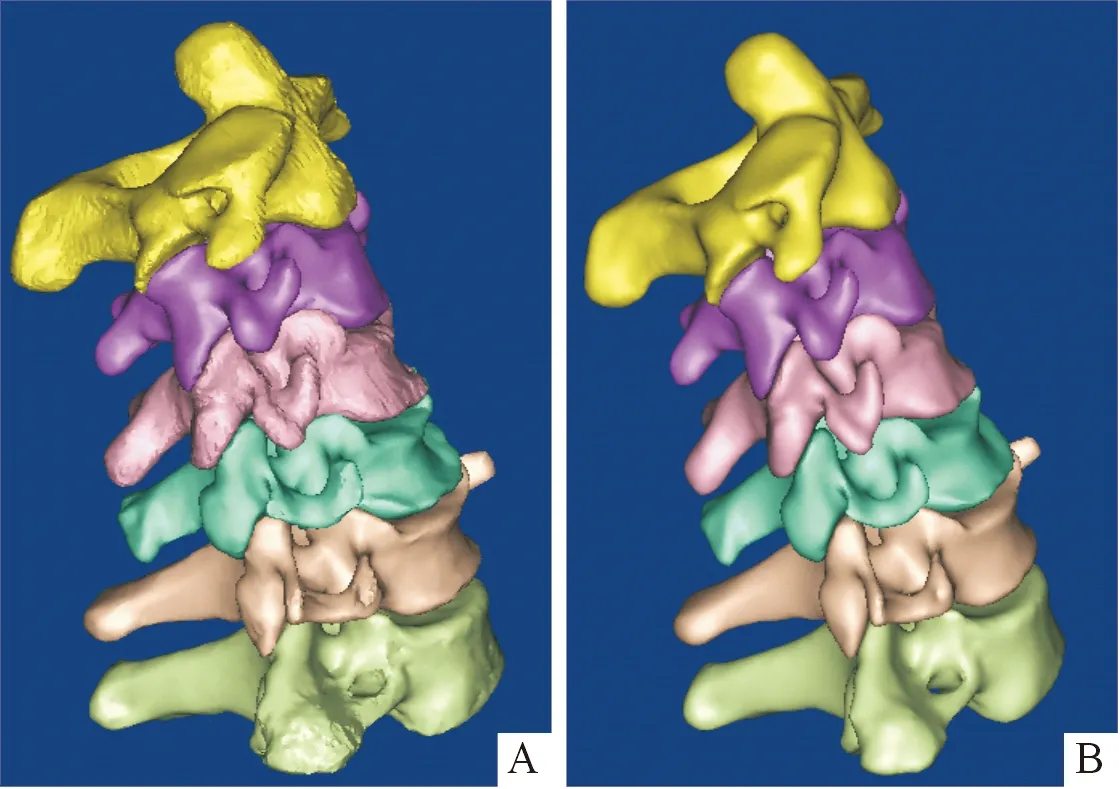
A:優化前;B:優化后。圖2 頸椎椎骨面網格模型
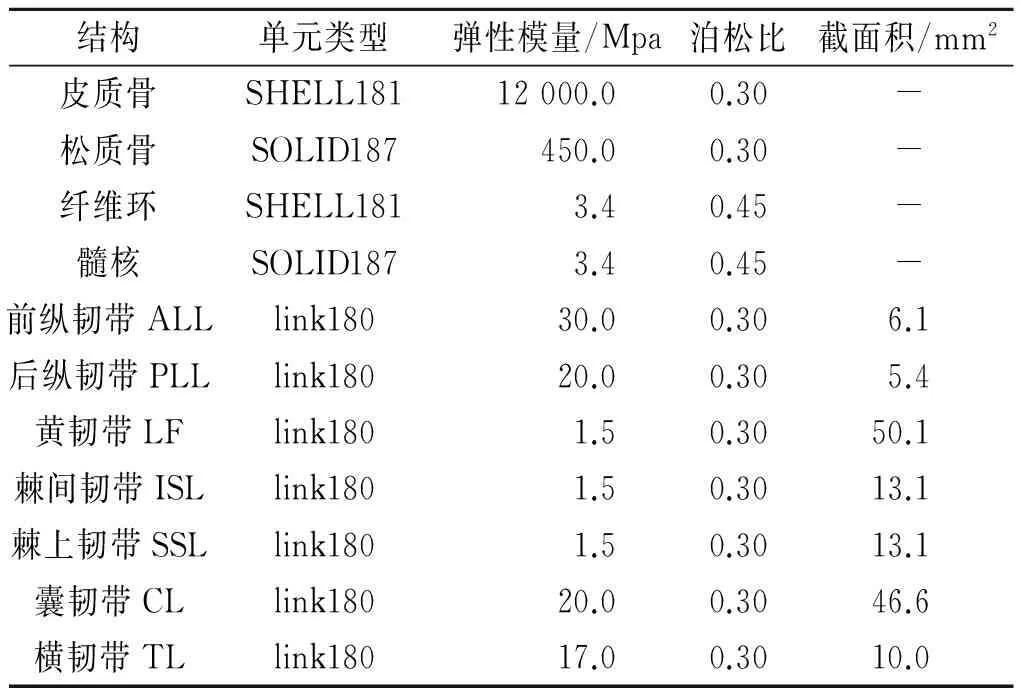
表1 頸椎C2~7有限元模型的單元類型和材料屬性
1.3.2頸椎C2~7三維有限元模型的驗證[9]頸椎有限元模型的驗證采用對比驗證的方法,應用文獻[10]中的加載方式與邊界條件,即在頸椎C7椎骨下表面施加全自由度約束限制,C2椎骨上表面逐步施加1.5 Nm的轉矩,來模擬人體頸椎的側彎、屈伸、軸向旋轉基本運動,將仿真結果數據與相關文獻[10-12]數據對比,驗證模型在相同載荷及邊界條件下的有效性。為了保證韌帶與椎骨、椎間盤與椎骨接觸面在仿真模擬過程中始終穩定連接,避免模型牽引時產生相對位移導致仿真失效,將椎間盤與椎骨、韌帶與椎骨接觸面均定義綁定接觸[13-15]。椎間盤是椎體間的主要連接結構,通過總位移云圖和等效應力云圖也可以看出椎間盤在人體頸部基本運動中起著關鍵的作用,作者通過在有限元分析軟件中建立局部坐標系,利用Ansys Workbench 15.0軟件自帶的指針與數據輸出功能,對各節段椎間盤總位移、等效應力作均值處理,整理數據得到C2~3、C3~4、C4~5、C5~6、C6~7的運動范圍,與相關文獻[10-12]比較。
1.3.3最優牽引角度仿真研究牽引角度范圍的確定:李晶等[16]認為最大應力的位置與牽引角度有關,牽引角度較小時,最大應力位置出現在頸椎上段,隨著牽引角度增大,最大應力的位置逐漸下移。高楚榮等[17]認為前傾超過30°時,頸椎牽引向上的作用力減少,水平方向力增加,難以維持平衡;只有在15°~20°前傾位牽引時,牽引力與頸椎運動軸心一致,符合力學要求,治療效果最佳,因此該研究選定牽引角度范圍為0~20°。牽引力大小確定:姜瑛等[18]認為,牽引力為患者體重的15%~20%范圍內頸椎的拉伸量達到最大值,治療效果最佳。該研究志愿者體重68 kg,因此對模型施加約100 N的牽引力模擬頸椎牽引治療。對所建頸椎有限元模型施加以上載荷,C7椎骨下表面全自由度約束,進行0~20°變角度仿真求解并進行數據處理。
2結果
2.1頸椎C2~7三維有限元模型的建立最終所建頸椎C2~7三維有限元模型共有98 257個節點,96 549個單元,高度模擬了頸椎結構與材料特性,所建頸椎C2~7實體CAD模型及三維有限元模型見圖3。
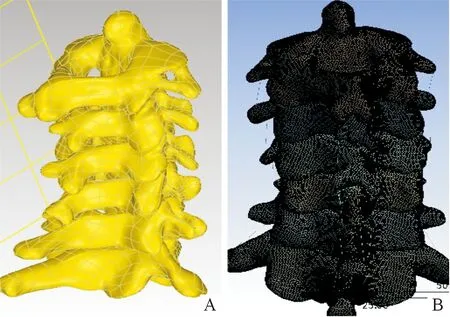
圖3 頸椎C2~7實體CAD模型(A)及三維有限元模型(B)
2.2頸椎C2~7三維有限元模型的驗證見圖4。通過總位移圖可以看出,頸椎C2~7模型的下頸椎部分活動范圍較小,而上頸椎部分活動范圍較大,椎間盤的總位移由上頸椎往下依次減小,符合力學規律;通過等效應力云圖可以看出頸椎C2~7各節段在此約束及載荷條件下的應力值均較小,對比各節段的椎間盤的等效應力云圖可以得到,相同的載荷及約束條件下,軸向旋轉狀態下的等效應力值大于側彎狀態。
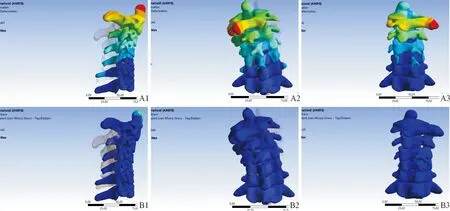
圖4 屈伸(1)、側彎(2)、軸向旋轉(3)三種基本運動時頸椎C2~7模型總位移云圖(A)和等效應力云圖(B)
該文的得到的C2~3、C3~4、C4~5、C5~6和C6~7的運動范圍與文獻[10-12]比較的結果見表2~4。
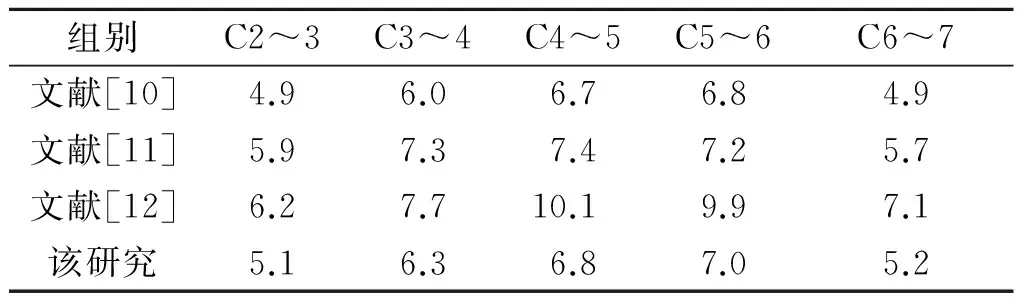
表2 屈伸狀態下各節段椎間盤運動范圍比較 °
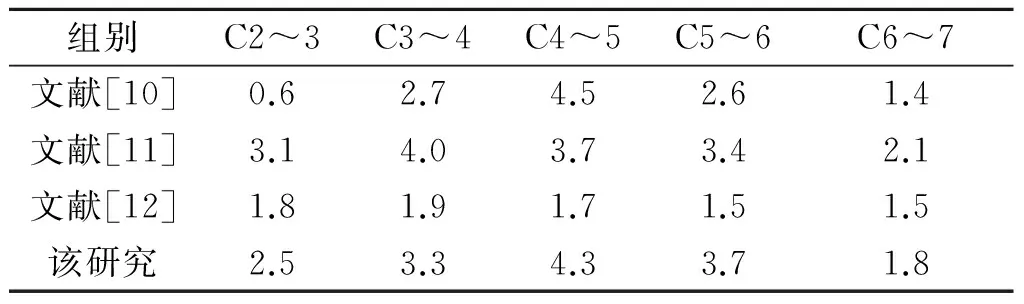
表3 側彎狀態下各節段椎間盤運動范圍比較 °
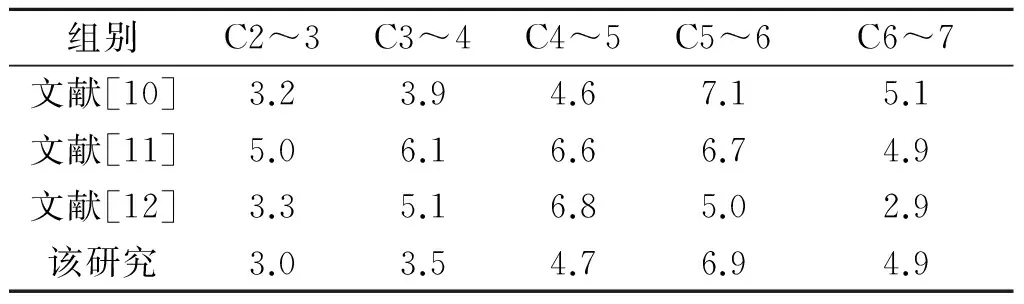
表4 軸向旋轉狀態下各節段椎間盤運動范圍比較 °
2.3最優牽引角度仿真研究不同角度下各節段頸椎間盤厚度變化見圖5。可以看出,牽引力大小不變,隨著牽引角度的增大,各節段椎間盤也發生相應變化,當牽引角度分別為2°、4°、8°、13°、17°時,椎間盤C2~3、C3~4、C4~5、C5~6、C6~7伸長量達到最大值,分別為1.061、1.031、0.992、0.956、0.886 mm。2°牽引下總位移云圖、等效應變圖和等效應力云圖見圖6,可以看出隨著牽引角度的變化,總位移的變化主要集中于上頸椎部分,椎間盤等效應變高于椎骨部分,等效應力也隨著牽引角度的增大開始從上頸椎轉移至下頸椎部分,其他角度云圖與此類似。角度牽引可以增大椎間隙和椎間孔,使突出的頸椎間盤回納[19],減輕對神經根、脊髓和椎動脈的壓迫,從而達到治愈的目的,椎間盤C2~3、C3~4、C4~5、C5~6、C6~7最優牽引角度分別為2°、4°、8°、13°、17°。
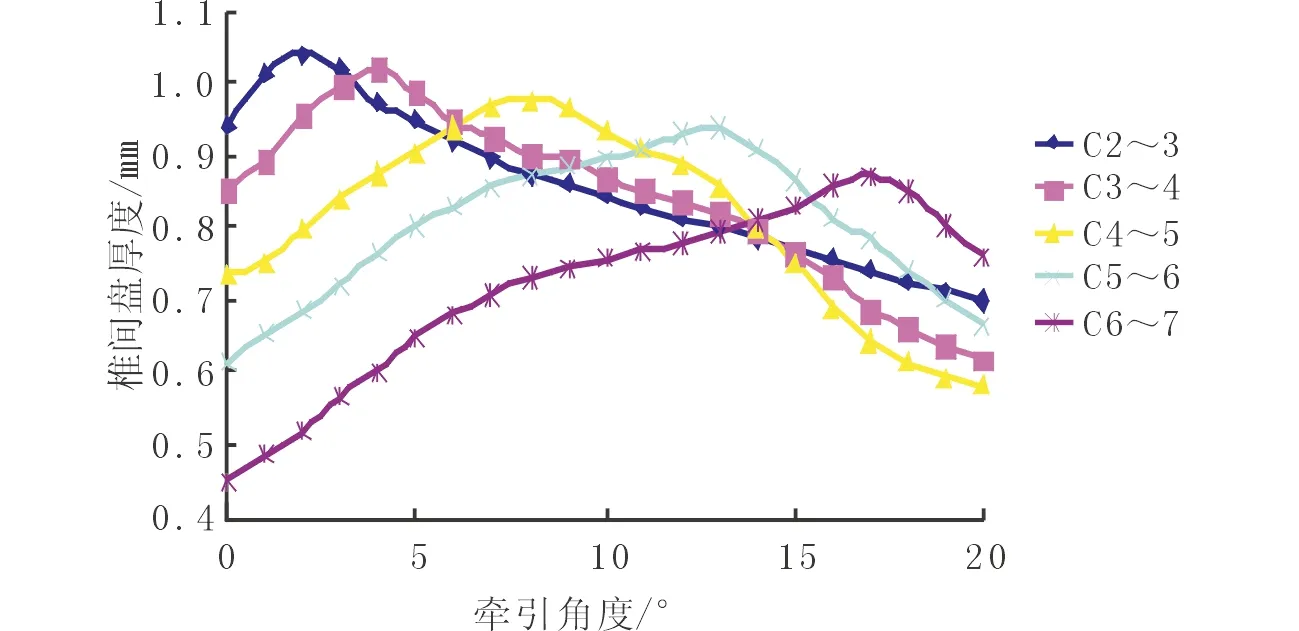
圖5 不同角度下各節段頸椎間盤厚度變化圖
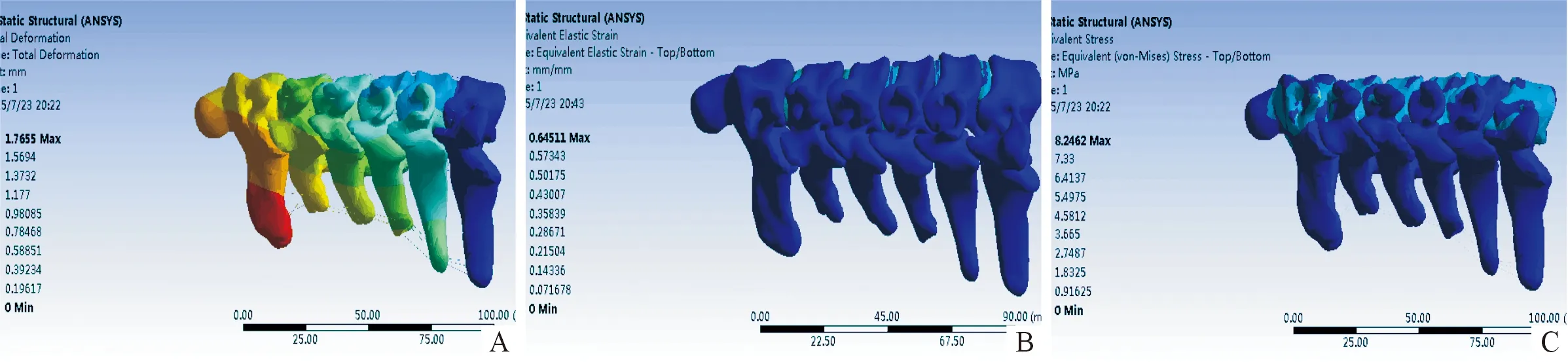
圖6 2°牽引下頸椎C2~7模型總位移云圖(A)、等效應變圖(B)和等效應力云圖(C)
3討論
有限元建模的方法已經在脊柱生物力學特性研究上被廣泛應用,但是也存在著影響所建模型質量因素多、頸椎解剖結構復雜、生物力學特性研究不理想等問題。脊柱有限元建模過程中,椎間盤模型的建立是一項難點,該研究利用逆向工程的方法生成椎間盤,在一定程度上保證了所建立的椎間盤與椎骨緊密貼合。韌帶部分在生理結構上有著只承受拉力不承受壓和剪切的特性,該研究應用軟件自帶的單元很好地模擬出這一特性,保證了模型的有效性。該研究結果顯示,作者所建的頸椎C2~7三維有限元模型仿真得到的屈伸、側彎、軸向旋轉運動范圍與已有文獻[10-12]一致,驗證了該有限元模型的有效性。但由于頸椎結構較為復雜,作者并未建立肌肉、關節等組織模型,而且對頸椎材料的定義也僅是參考文獻資料數據簡化為線彈性材料,實際上頸椎大部分結構材料為非勻質、各向異性的黏彈性材料,在單元劃分、節點選擇上很多跟外部因素有關,因此具有一定的局限性。成角度牽引時力可以分為軸向與法向兩個方向,通過軸向力的作用可以拉大椎間隙,增大椎間孔,解除神經根的壓迫,對頸椎病達到治愈的目的,但是最終治療效果還與患者個人身體素質、外部環境因素等有很大關系,因此治療時宜結合患者的患病類型、體質等因素,指定個性化的治療方案以達到最佳治療效果。該研究結果顯示,牽引力為100 N,牽引角度分別為2°、4°、8°、13°和17°時,頸椎C2~3、C3~4、C4~5、C5~6、C6~7椎間盤伸長量達最大值。
綜上所述,該研究基于CT圖像建立了結構準確的人體頸椎C2~7三維有限元模型,采用有限元分析法模擬頸椎成角度牽引,最終得到了頸椎牽引的最優角度,仿真結果顯示,頸椎椎間盤C2~3、C3~4、C4~5、C5~6、C6~7的最優牽引角度分別為2°、4°、8°、13°、17°,為新型頸椎牽引治療系統的開發提供依據。
參考文獻
[1]王晨曦,趙改平,柏磊磊,等.下頸椎 C3-C7活動節段三維有限元的建模和驗證[J].生物醫學工程研究,2015,34(2):80
[2]BREKELMANS WA,POORT HW,SLOOFF TJ.A new method to analyse the mechanical behaviour of skeletal parts[J].Acta Orthop Scand,1972,43(5):301
[3]李斌,趙文志,陳秉智,等.全頸椎有限元模型的建立與驗證[J].中國組織工程研究與臨床康復,2010,14(13):2299
[4]劉治華,徐新偉,管文浩,等.腰椎有限元模型的建立與不同角度牽引條件下的仿真研究[J].鄭州大學學報(醫學版),2014,49(1):119
[5]KALLEMEYN N,GANDHI A,KODE S,et al.Validation of a C2~C7 cervical spine finite element model using specimen-specific flexibility data[J].Med Eng Phys,2010,32(5):482
[6]曹立波,奠波,盧暢.基于CT圖像頸椎有限元模型的建立及驗證[J].湖南大學學報(自然科學版),2009,36(1):24
[7]HA SK.Finite element modeling of multi-level cervical spinal segments (C3-C6) and biomechanical analysis of an elastomer-type prosthetic disc[J].Med Eng Phys,2006,28(6):534
[8]YOGANANDAN N,KUMARESAN S,PINTAR F.Biomechanics of the cervical spine part 2:Cervical spine soft tissue responses and biomechanical modeling[J].Clin Biomech,2001,16(1):1
[9]張昊,白凈.頸椎有限元模型的建立方法及進展[J].國外醫學(生物醫學工程分冊),2005,28(4):198
[10]林冬.一個退變頸椎三維有限元模型的建立和應用[D].成都:四川大學,2007.
[11]HONG-WAN N,EE-CHON T,QING-HANG Z.Biomechanical effects of C2-C7 intersegmental stability due to laminectomy with unilateral and bilateral facetectomy[J].Spine (Phila Pa 1976),2004,29(16):1737
[12]PANJABI MM,CRISCO JJ,VASAVADA A,et al.Mechanical properties of the human cervical spine as shown by three-dimensional load-displacement curves[J].Spine (Phila Pa 1976),2001,26(24):2692
[13]薛鳳先,胡仁喜,康士庭,等.機械與結構有限元分析從入門到精通[M].北京:機械工業出版社,2010:131
[14]岳壽偉.腰椎間盤突出癥的非手術治療[M].北京:人民軍醫出版社,2009:16
[15]SCHMIDT H,SHIRAZI-ADL A,GALBUSERA F,et al.Response analysis of the lumbar spine during regular daily activities:a finite element analysis[J].J Biomech,2010,43(10):1849
[16]李晶,陳禾麗.頸椎牽引的力學實驗與臨床應用[J].中華理療雜志,1992,15(3):133
[17]高楚榮,王丹影,李志申.頸椎牽引的力學分析[J].中華理療雜志,1993,16(4):215
[18]姜瑛,王傳堂,鄒曉光,等.不同牽引力治療頸椎病X線觀察療效分析[J].醫學影像學雜志,2000,10(2):102
[19]劉凱,謝青,畢霞.頸椎機械牽引技術的作用及機制研究[J].中國組織工程研究與臨床康復,2010,14(28):5272
Establishment of a three-dimensional finite element model of the C2-7 cervical spine and simulation under optimal angles traction
LIUZhihua1),XUWeichao1),ZHANGXinmin2),LIUBojian1)
1)SchoolofMechanicalEngineering,ZhengzhouUniversity,Zhengzhou4500012)ZhengzhouFeilongMedicalEquipmentCo.Ltd.,Zhengzhou450001
Key wordscervical spine;finite element model;reverse engineering;optimal angle
AbstractAim: To develop a three-dimensional finite element model of human cervical spine C2-7 and explore the effect of cervical discs with cervical traction in different angles. Methods: By using the method of reverse engineering with Mimics 10.01 and Geomagic Studio,a three dimensional geometric CAD model of the cervical spine was developed from the CT scan images of a normal adult male, then, the model was imported into Ansys Workbench 15.0, and a three dimensional finite element model was obtained and verified. After setting the boundary, the model was loaded to simulate the traction under different traction angles from 0-20° when the human body was lying down,so as to obtain optimal traction angles of each cervical discs in traction treatment.Results: The simulations revealed that the optimal traction angles for C2-3,C3-4,C4-5,C5-6,C6-7 were 2°,4°,8°,13°,17°,respectively. Conclusion: The three dimensional finite element model of cervical spine C2-7 has been established.
doi:10.13705/j.issn.1671-6825.2016.03.019
中圖分類號R318
*河南省產學研合作項目142107000011
