基于BLE的室內指紋定位優化技術
2016-06-15 00:38:22陶佳峰楊曉洪王劍平
安徽農業科學 2016年8期
陶佳峰, 楊曉洪, 王劍平, 張 果
(昆明理工大學信息工程及自動化學院,云南昆明 650500)
?
基于BLE的室內指紋定位優化技術
陶佳峰, 楊曉洪, 王劍平, 張 果
(昆明理工大學信息工程及自動化學院,云南昆明 650500)
摘要針對RSSI的室內定位技術的功耗高和精度低的問題,采用藍牙4.0作為節點,應用具有低功耗、遠距離和成本低等優點的BLE技術,通過在離線階段采用高斯-均值算法對指紋數據庫進行優化和在現階段改進的跳變自適應卡爾曼算法進行數據濾波研究,并且通過藍牙4.0無線網絡系統進行試驗。結果表明,優化后的指紋庫和自適應卡爾曼定位算法,在復雜的環境中比傳統的定位算法更加穩定和準確。
關鍵詞藍牙低功耗技術; 高斯-均值濾波; 跳變自適應卡爾曼濾波; 室內指紋定位
隨著移動設備和無線局域網的普及,定位服務越來越成為人們生活中必不可少的功能。相比于目前已經很成熟的戶外GPS地圖定位,室內位置信息的獲取,特別是在場地復雜的公共場所比如大型超市、商場、機場、博物館等環境中,也成為日益需求的服務,并且具有較為廣闊的應用前景。藍牙低能耗(BLE)技術是低成本、長距離、高速啟動和互連、可互操作的魯棒性無線技術[1],這些特點對于室內定位都是非常有利的,而且在最近幾年里,藍牙4.0模塊已廣泛應用于手機及平板電腦中,對于室內定位的推廣是很有利的。以上這些都保證了藍牙低功耗技術在室內定位的實用性和可行性。
由于在復雜室內環境中,信道信號的的傳播容易受到多徑效應、反射、散射等干擾,這也是給定位帶來較大誤差的主要因素。應用典型的參數化室內測距技術有基于信號到達角度模型(AOA)、基于接收信號強度指示模型(RSSI)[2]、基于信號到達時間模型(TOA)[3]、基于信號達到時間差模型(TODA)[4]等;但是由于室內物體的遮擋會造成比較嚴重的多徑效應干涉以及反射、散射等現象[5],信號到達角與 RSSI 值等信息不能精確地描述兩點之間的位置關系[6],故需要對RSSI信號值進行濾波處理,才能達到理想的定位效果。
由于基于RSSI的距離測量技術是一種新型低成本和低實現復雜度的距離測量技術,并且在室內定位領域有著廣泛的應用,故該研究也提出基于RSSI的藍牙4.0指紋定位優化技術。室內指紋定位技術主要分為2個階段[7]:①離線階段,在所需要定位的區域內預定坐標點,然后在每個坐標點上采集每個信標節點的RSSI值,存入到相應坐標點的數組中,最后建立RSSI指紋庫;②在線階段,通過接收每個信標節點的RSSI值,在線匹配指紋數據庫中的RSSI信息,實時顯示所處的坐標位置。筆者分別對這2個階段進行算法的改進,首先,離線階段指紋庫建立的準確與否直接關系到在線定位的精度,故通過高斯-均值濾波算法對采集的信號數據進行優化處理,然后再存到指紋庫中;在在線定位階段,對采集的定位信息數據進行跳變自適應卡爾曼濾波算法處理,得到實時的信息數據,然后采用K-加權最近鄰算法進行實時定位,從而達到精度較高的室內定位效果。
1指紋庫數據優化
離線指紋庫建立的精確與否對在線定位的精度有著較大影響,所以建立一個較為準確的指紋庫是提高定位精度的基礎。大量研究表明,采集的RSSI數據的隨機分布是近似符合高斯分布模型的。使用高斯濾波模型[8]可以比較好地擬合RSSI在實際環境中的分布,從而消除那些小概率噪聲干擾,然后通過均值濾波,得到穩定、平滑的RSSI值。具體濾波設計的過程:首先在數組中存儲采樣中的一組RSSI信號數據,采集的RSSI數據量為m;然后利用公式求解所要擬合的高斯濾波模型的均值和方差,求出其密度函數f(RSSI)。公式如下:
(1)
(2)
(3)
式(2)根據均值μ和方差δ2確定RSSI的有效范圍,k為密度函數取值區間[k,1]的下限值,通過設置k的數值設置,可以得到采集數據保留的樣本數。如果k過大,則說明保留的數據少,有可能會對RSSI數據的真實性造成破壞;若k過小,會提高保留的樣本數,保證數據的真實性,但這樣對小概率事件濾波效果下降,所以k值的正確選取有助于提高計算速度和更好地排除突變的小概率數據。高斯濾波可以有效地濾除偏離真實值的數據,但并不能消除數據的波動。為了達到RSSI的樣本數據的平滑、穩定的輸出,該研究采用均值算法繼續對樣本數據進行處理。
通過大量數據分析,選擇臨界值在0.6時效果最佳,具體公式如下:
(4)
式(4)對篩選后的RSSI求其均值,然后存入指紋庫中。
2在線定位優化算法
2.1卡爾曼濾波算法由于室內環境復雜,信號信道受到的干擾因素比較多,那么未知節點接收到的信號數據仍然會有很大的波動,對于定位將是很不利的。卡爾曼濾波器能有效去除數據中的突變數據和噪聲波動,實現值的準確、平滑輸出。卡爾曼濾波算法分為預測和修正2個階段[9-10]。
2.1.1時間更新(預測階段)。
(1)計算先驗狀態估計值:
x(k|k-1)=F·x(k-1|k-1)+B·u(k)+w(k)
(5)
(2)計算先驗狀態估計值的協方差:
P(k|k-1)=F·P(k-1|k-1)·FT+Q
(6)
式(5)、(6)初始值分別為x(0)、P(0)。
2.1.2測量更新(修正階段)。
(1)計算加權矩陣(卡爾曼增益):
Kg(k)=H·P(k|k-1)·HT+R
(7)
(2)對預測值進行修正:
x(k|k)=x(k|k-1)+Kg(k)·[Z(k)-H·x(k|k-1)]
(8)
(3)更新修正值的協方差:
P(k|k)=[1-Kg(k)·H]·P(k|k-1)
(9)
式中,I為1的矩陣,對于單模型單測量時,I=1。式(7)~(9)中,x(k)是k時刻的系統狀態,u(k)是k時刻對系統的控制量,P(k|k-1)是x(k|k-1)對應的協方差。F和B是系統參數,對于多模型系統,他們是矩陣。Z(k)是k時刻的測量值,H是測量系統的參數,對于多測量系統,H為矩陣。w(k)表示過程噪聲,被假設成高斯白噪聲,其協方差是Q,這里假設W(k)不隨系統狀態變化而變化。
2.2卡爾曼濾波算法的優化但是實時定位的過程中,在采集的RSSI值在小范圍波動的時候,卡爾曼濾波算法可以比較好地及時跟蹤這些變化,調整RSSI的估計值,定位較為準確,但是,當未知節點移動較大位置后,此濾波算法得到的估計值只能較為緩慢地接近真實值,表現的收斂速度是很慢的,這對RSSI的準確估計是很不利的。
由于卡爾曼濾波算法在RSSI信號跳變應用中存在的不足,該研究提出了一種對RSSI信號出現跳變有自適應能力的優化卡爾曼濾波算法(簡稱跳變自適應卡爾曼濾波算法)。此算法能通過前幾次接收的RSSI觀測值快速的判斷出RSSI是否發生了跳變,如果發生了跳變,這時可以及時修改卡爾曼濾波的相關參數,從而有效地降低此濾波算法對發生跳變前的狀態估計值的信任度,可以在消除室內環境干擾的前提下,提高此算法對出現RSSI跳變情況后的再次收斂快速性,進而使此算法在室內復雜環境下的自適應能力顯著增強,提高采集的RSSI值的準確度。
跳變自適應卡爾曼濾波算法是在卡爾曼濾波算法的基礎上,增加了RSSI跳變時候的判斷函數,具體公式如下:
(10)
(11)
(12)
式(11)~(12)中,ψ(k)為從k(k≥α)時刻起前k次觀測值的迭代均值。Φ(k)為RSSI是否發生跳變的判定函數,反映的是最近α次觀測值和估計值的均值近似程度。其中,α的值需要依據實際RSSI的波動情況進行具體設定(當α的值過小時,利用當前觀測值進行跳變判定時很容易受到突變現象的影響,從而將影響到躍變判定的準確性;但當α的值過大時,就會對算法躍變判定的反應靈敏度產生影響);P(k-1)是k-1時刻的誤差協方差,所以當算法趨于收斂時,P(k-1)的值會變得較小。由P(k-1)和β可以使算法在對連續發生的跳變進行判定時,有效地避開上一次RSSI跳變處理造成的數據波動的階段,使跳變判定過程在上一次的RSSI跳變處理趨于收斂后能夠再次生效,也就防止跳變判定過程進入死循環中。其中γ是RSSI跳變判定的臨界值,當Φ(k)>γ時,則可認為信號強度RSSI發生了跳變。 通過分析可知,γ若越小,則算法越容易在外界突變干擾的影響下出現跳變誤判,γ若越大,則可能使算法躍變判定的靈敏度下降,因此,γ的值需要根據所處的具體實驗環境分析而定。
跳變自適應卡爾曼濾波算法是通過基礎式(5)~(9)和改進式(10)~(12)來實現,使卡爾曼濾波算法由實測、預測、校正的3步迭代方法,進而擴展為實際測量、跳變判定、預測、參數校正的4步迭代方法。此改進算法的流程見圖1。
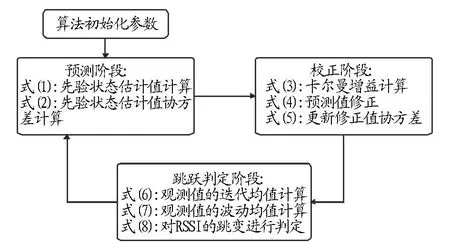
圖1 跳變自適應卡爾曼濾波算法流程Fig.1 Flow of hopping adaptive Kalman filter algorithm
通過試驗數據分析,得到較為滿意的濾波算法的參數,參數設置為:R=0.3,Q=0.005;α=8,β=4,γ=0.5。故改進后的對RSSI數據處理的效果見圖2。
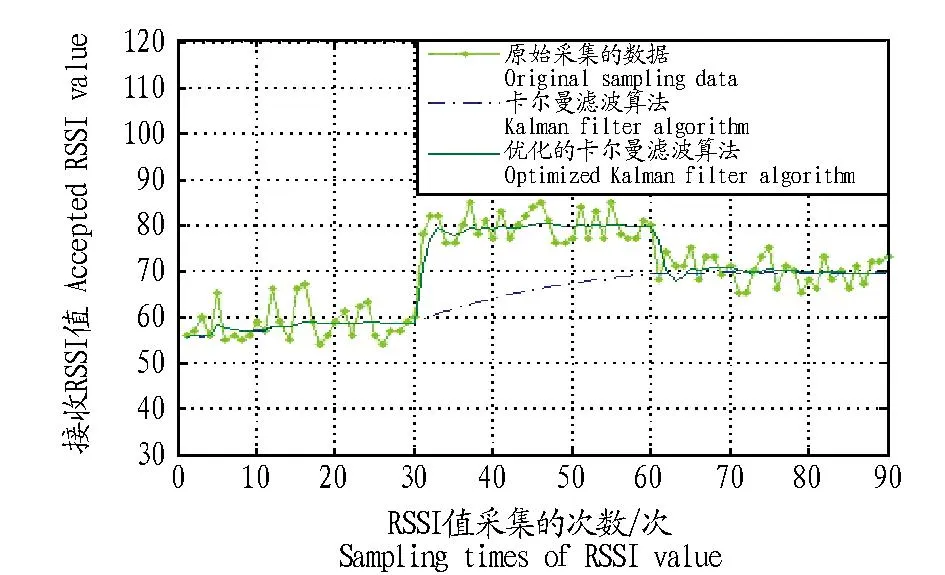
圖2 改進后的對RSSI處理的效果Fig.2 Processing effect of RSSIT after improvement
3K加權最近鄰定位算法
基于RSSI的位置指紋定位算法主要包括:最近鄰法(Nearest Neighbor,NN)、K最近鄰法(K-Nearest Neighbor,KNN)、K加權最近鄰法(WKNN)等。目前采用較多的是K加權最近鄰法,此算法是在前兩個定位算法上進行的改進,定位精度更好,所以本位也采用此算法進行定位。
當移動終端進入定位區域后,會實時采集來自n個定位節點的RSSI信號強度值,設為Z=[Z1,Z2,…,Zn],選取指紋庫中一組指紋數據,設為Xi=[S1i,S2i,…,SNi],通過對比實時信號的位置指紋Z和指紋庫中的X的距離,以此來計算未知節點和定位節點之間的歐式距離;然后將加權和作為待定位節點的最終目標,具體公式如下:
L=arg mini∈[1,N]‖Z-Xi‖
(13)
(14)

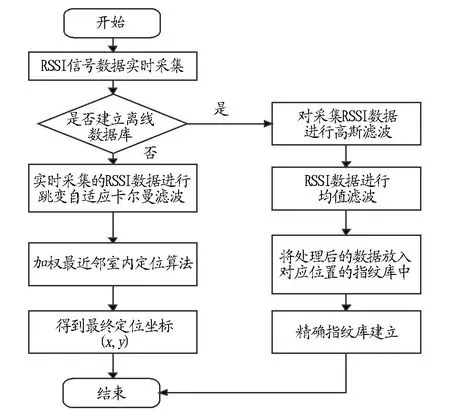
圖3 室內指紋定位算法優化過程Fig.3 Optimization process of indoor fingerprint positioning algorithm
4仿真試驗和數據分析
此次試驗的硬件系統選取有Ti公司的CC2541芯片集成的藍牙4.0低功耗模塊,選取1 m×6 m實驗室作為試驗區域。在離線指紋庫建立階段,選取兩個節點之間的距離為1 m,為了適合實驗室的環境,選取總共40個指紋點。通過Matlab對改進的定位優化算法進行仿真分析,結果表明,該研究采取的改進算法的定位精度比傳統定位算法有顯著提高,下面對部分仿真結果進行顯示和分析。此優化算法的實時定位顯示見圖4。

圖4 優化算法定位實時顯示仿真結果Fig.4 Real-time display simulation results of the optimized algorithm location
通過3組實驗驗證優化算法的有效性,試驗一只采用均值濾波建立離線庫,然后采用K加權最近鄰進行定位;試驗二采用高斯-均值濾波建立指紋庫,然后采用K加權最近鄰進行定位;試驗三也就是該研究采用的優化算法,是在試驗二的基礎上,增加了對在線采集的RSSI數據進行跳變自適應卡爾曼濾波,然后通過K加權最近鄰算法完成最終定位。3組試驗定位結果對比分析見表1。
表13組試驗定位結果對比分析
Table 1Comparative analysis of three groups of experimental positioning results
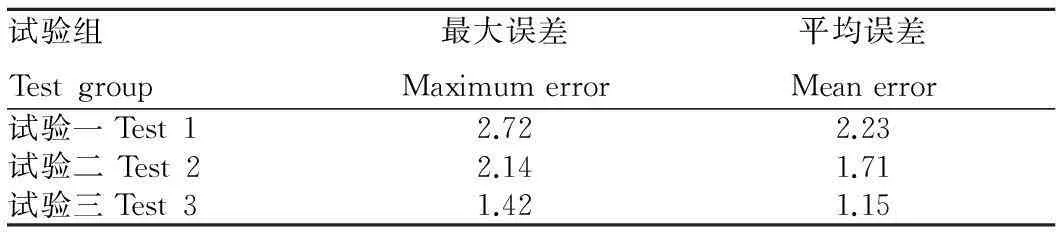
試驗組Testgroup最大誤差Maximumerror平均誤差Meanerror試驗一Test12.722.23試驗二Test22.141.71試驗三Test31.421.15
由表1可知,試驗二定位精度比試驗一有一定的提高,說明指紋庫的優化能有效地降低最終的定位誤差;試驗三和試驗二的對比結果顯示,通過對現在定位階段采集的RSSI數據的實施濾波處理,進一步提高了實時定位的準確度,驗證了所提出的優化技術的可行性和實用性。
5結論
該研究分析了基于低功耗藍牙4.0室內無線傳感器網絡通過RSSI進行指紋定位的性質。針對RSSI信號在建立離線庫階段容易受到環境干擾,采用高斯-中值濾波對采集的數據進行處理,然后在保存到指紋庫中,保證了指紋庫的真實性,為后面的實時定位提供良好的前提;為了使在線定位階段降低RSSI值受到的干擾,采用卡爾曼濾波算法進行處理,但是隨著未知節點的移動,為了達到卡爾曼濾波算法的快速收斂,提出了改進的跳變自適應卡爾曼濾波算法,不僅提高了濾波收斂的快速性,而且保障了RSSI值的平穩輸出,最后通過試驗和Matlab仿真驗證了室內定位優化算法的可行性。該研究還采用了低功耗藍牙技術,通過藍牙4.0作為節點的高精度室內指紋定位技術有廣闊的應用前景。
參考文獻
[1] 李娟娟,張金藝,張秉煜,等.藍牙 4.0 標準規范下的模糊指紋定位算法[J].上海大學學報 (自然科學版),2013,19(2):126-131.
[2] GIROD L,BYCHKOVSKIY V,ELSON J,et al.Locating tiny sensors in time and space:A case study[C]//International Conference on Computer Design (ICCD 2002).Freiburg:IEEE Computer Society,2002: 214-219.
[3] ALA V I B,PAHLAVAN K.Modeling of the TOA-based distance measurement error using uwb indoor radio measurements[J].Communications letters,IEEE,2006,10(4):275-277.
[4] CURRAN K,FUREY E,LUNNEY T,et al.An evaluation of indoor location determination technologies[J].Joumal of location based services,2011,5(2):69-78.
[5] 詹 杰,劉宏立,劉述鋼,等.基于 RSSI 的動態權重定位算法研究[J].電子學報,2011,39(1):82-88.
[6] 容曉峰,楊娜.RSSI 位置指紋的定位誤差分析與仿真[J].西安工業大學學報,2010,30(6):574-578.
[7] YOUSSEF M A,AGRAWALA A,UDAYA SHANKAR A.WLAN location determination via clustering and probability distributions[C]//Proceedings of the First IEEE International Conference on.IEEE,2003:143-150.
[8] 詹杰,吳伶錫,唐志軍.無線傳感器網絡RSSI測距方法與精度分析[J].電訊技術,2010,50(4):83-87.
[9] 劉靜,姜恒,石曉原.卡爾曼濾波在目標跟蹤中的研究與應用[J].信息技術,2011,15(10):74-77.
[10] 彭丁聰.卡爾曼濾波的基本原理及應用[J].軟件導刊,2009,8(11):32-35.
Indoor Fingerprint Location Optimization Technology Based on BLE
TAO Jia-feng,YANG Xiao-hong,WANG Jian-ping et al
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming,Yunnan 650504)
AbstractAiming at the problem of high energy consumption and low accuracy of RSSI indoor positioning technology,using Bluetooth 4.0 as a node,BLE technology with advantages of low energy consumption,long distance and low cost was adopted.Data filter was studied through optimizing fingerprint database by using Gauss-mean method and improved hopping adaptive Kalman algorithm,the experiment was carried out in Bluetooth 4.0 wireless network.The results showed that in a complex environment,the optimized fingerprint database and adaptive Kalman location algorithm is more stable and accurate than traditional positioning method.
Key wordsBluetooth low energy technology; Gauss-mean filter; Hopping adaptive Kalman filter; Indoor fingerprint location
基金項目國家自然科學基金項目(61364008);云南省應用基礎研究重點項目(2014FA029);云南省教育廳重點基金項目(2013Z127);昆明理工大學復雜工業控制學科方向團隊建設計劃項目。
作者簡介陶佳峰(1990- ),男,安徽蕭縣人,碩士研究生,研究方向:實時運動控制。
收稿日期2016-02-07
中圖分類號TP 391
文獻標識碼A
文章編號0517-6611(2016)08-289-04