基于旋轉諧振結構的單芯片二維電場傳感器*
2016-06-13 09:09:30方東明彭春榮夏善紅
傳感器與微系統 2016年2期
王 宇, 方東明, 陳 博, 彭春榮, 夏善紅
(1.中國科學院 電子學研究所 傳感技術國家重點實驗室,北京 100190;2.中國科學院大學,北京 100049))
?
基于旋轉諧振結構的單芯片二維電場傳感器*
王宇1,2, 方東明1, 陳博1, 彭春榮1, 夏善紅1
(1.中國科學院 電子學研究所 傳感技術國家重點實驗室,北京 100190;2.中國科學院大學,北京 100049))
摘要:提出并研制了一種二維電場檢測傳感芯片,將四個電場測量微型單元和旋轉式驅動微結構集成在3.5 mm×3.5 mm的敏感結構上,實現了單芯片的電場二維測量。介紹了傳感器的工作原理、敏感結構的設計,以及基于絕緣體上硅(SOI)工藝的單芯片微型二維電場傳感器制備工藝技術。成功研制出傳感器原理樣機,研究了微型二維電場傳感器的標定方法,開發(fā)了用于電場二維標定的測試裝置,并在室溫常壓下對傳感器進行了二維標定。實驗結果表明:該傳感器能夠有效減小電場的軸間耦合干擾,測量誤差優(yōu)于7.04 %,線性度可達到1.25 %。
關鍵詞:電場傳感器; 微機電系統; 絕緣體上硅(SOI); 旋轉諧振式微執(zhí)行器; 二維測量; 電場標定
0引言
電場傳感器在許多領域具有重要的應用,比如:雷暴來臨前會引起大氣電場強度的劇烈變化,通過對大氣電場的監(jiān)測可實現雷電預警;此外,還可用于電力系統中的電力設備絕緣狀況監(jiān)測、工業(yè)靜電測量,以及氣象學中雷云的電荷結構反演[1~3]等。在高空,空間大氣電場除了垂直分量,還包括水平分量,因此,為準確測量高空大氣電場需采用三維電場傳感器。已有的三維電場傳感器有雙球式、旋葉式等,它們都由傳統機械加工方式制備,體積大、功耗高,并且組裝復雜、成本較高。微機電系統(MEMS)技術制備的傳感器兼具體積小、功耗低、易集成化、易批量生產等突出優(yōu)點,成為近年來研究的熱點。
目前有多個單位報道了微型電場傳感器的研究成果[4~10],然而目前所報道的微型電場傳感器都只能測量電場的一維分量。采用電場傳感器陣列設計方案也可以進行電場三維測量,目前報道的相關研究需要至少3只傳感器[11]。在準確測量高空大氣電場的前提下,為簡化測量系統的復雜程度,應減少傳感器的使用數量。采用二維電場傳感器和一維電場傳感器結合的設計,可以分別測量電場水平分量和垂直分量,該方案僅需2只傳感器。目前,微型二維電場傳感器的相關研究未見報道。
本文提出一種新型的微型二維電場傳感器,實驗結果表明:該傳感器能夠有效減小電場的軸間耦合干擾,可實現二維電場的測量。
1傳感器工作原理與結構設計
如圖1所示,基于旋轉梳狀結構的二維電場傳感器位于X-Y平面,軸向與Z軸重合,由X+,X-,Y+,Y-四個電場測量單元和旋轉諧振式微執(zhí)行器構成。四個電場測量單元的結構相同,位置相隔90°交錯排列,X+,X-電場測量單元組成差分結構檢測電場強度的X分量,Y+,Y-電場測量單元組成差分結構檢測電場強度的Y分量。每個電場測量單元由感應電極和屏蔽電極構成,感應電極與屏蔽電極均為旋轉型梳齒,感應電極成對設置在屏蔽電極兩側,構成差分型結構,在增加信號輸出的同時,降低串擾等共模噪聲,從而提高傳感器輸出信號的信噪比。旋轉諧振式微執(zhí)行器由推挽式梳狀驅動電極、屏蔽電極和蛇形懸臂梁構成。推挽式靜電驅動結構可使電場傳感器在理想的工作模態(tài)獲得較大振幅[12],此外,該結構對串擾等共模噪聲也形成抑制作用。四根蛇形懸臂梁作為傳感器機械結構的彈性元件,呈十字形排列,位于相鄰電場測量單元之間,一方面對懸空的屏蔽電極起連接支撐作用,另一方面,保證了電場傳感器工作模態(tài)的穩(wěn)定性。本文提出的電場傳感器其理想工作模態(tài)為平面內旋轉振動,在設計上采用了蛇形懸臂梁的方案,大大降低相鄰模態(tài)的耦合干擾。
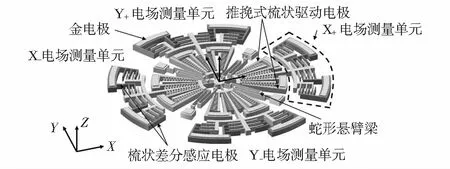
圖1 微型二維電場傳感器結構圖Fig 1 Structure of the proposed two-dimensionalelectric field micro sensor
微型二維電場傳感器工作時,推挽式驅動結構兩端的驅動電極上分別施加差分的交直流混合信號,根據虛功原理,傳感器在靜電力矩作用下會沿圓周方向做旋轉振動,該振動引起四個不同位置的電場測量單元同步感應,各電場測量單元中屏蔽電極與感應電極的相對位置發(fā)生改變,感應電極的有效感應面積隨之發(fā)生周期性變化。根據高斯定理,感應電極表面的感應電荷總量變化形成電流,該電流信號的幅值與待測電場強度大小呈正比,將輸出信號接入電路進行轉換、放大得到更加便于測量的電壓信號。
2有限元仿真
本文使用有限元數值計算軟件對其進行模擬仿真。一對平行板分別施加高低電位,產生勻強電場,將電場傳感器仿真模型放置在平行板的中間位置。由圖1可知,傳感器以四個電場測量單元的位置確定了一個局部坐標系,傳感器所在平面為X-Y平面,勻強電場與傳感器共面,所以,該勻強電場為X-Y平面內的二維電場。固定平行板位置不變,以傳感器中心為軸旋轉傳感器,此時外界施加的電場與局部坐標系的X軸存在一個夾角,該夾角即為待測電場的入射角。圖2表示電場入射角為0°,15°,30°,45°時,電場傳感器的電勢分布云圖,電場傳感器的存在使得勻強電場在該處發(fā)生畸變,產生邊緣效應,電場在電場傳感器的邊角處聚集。
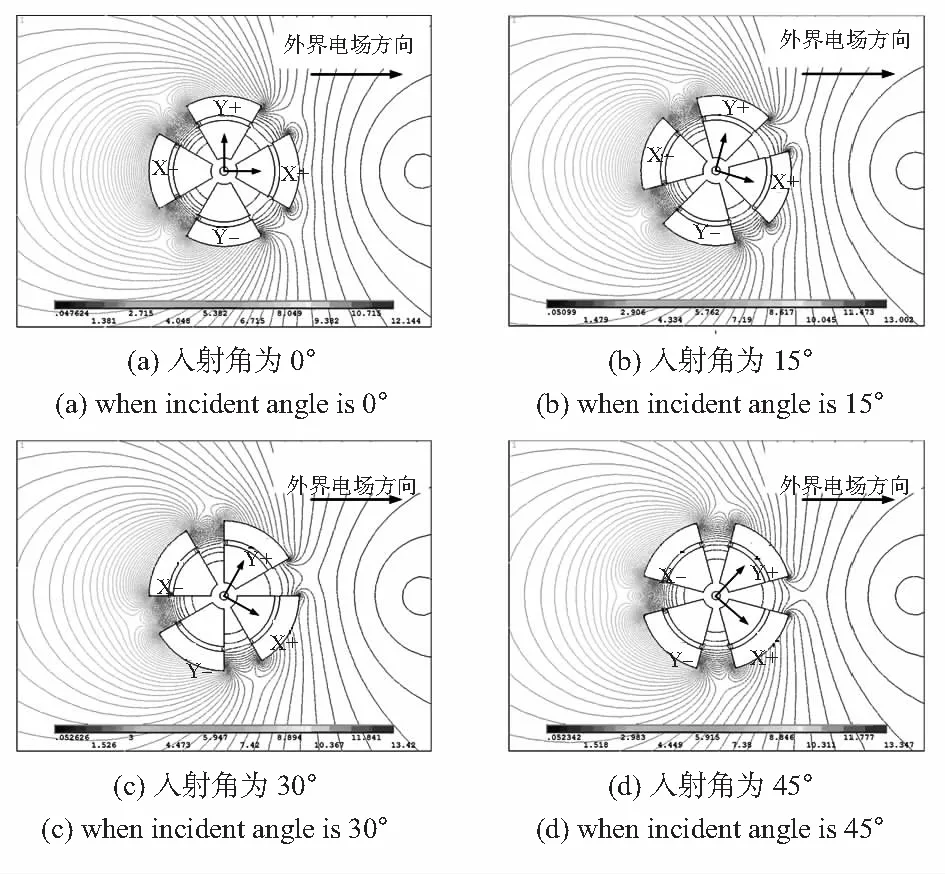
圖2 不同入射角時傳感器在勻強電場中的等勢圖Fig 2 Potentiometric contour of sensorwith different incident angles in uniform electric field
電場傳感器通過感應電荷量的變化檢測電場,使外界待測電場保持1V/m的幅度旋轉360°,差分后的感應電荷變化曲線如圖3所示,在360°的周期內,X方向差分后的結果與Y方向差分后的結果幅值相同,相位相差90°,根據矢量正交分解理論,X-Y平面二維電場強度可以分解為X分量和Y分量,其中,X分量為電場矢量在X軸的投影,Y分量為電場矢量在Y軸的投影,圖3所示結果與該理論相符合,因此,從理論上驗證了本文提出的微型電場傳感器測量二維電場的可行性。
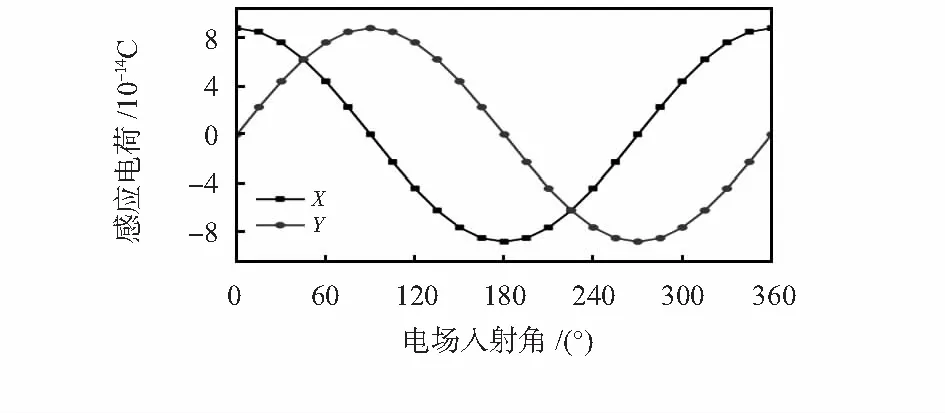
圖3 差分電場測量單元感應電荷隨電場入射方向變化曲線Fig 3 Curve of induced charges of differential electric fieldmeasurement unit varying with incident direction of electric field
3實驗
本文提出的微型二維電場傳感器采用共面電極結構,傳感器制備工藝的設計采用了基于SOI微加工技術的工藝流程。首先在襯底下表面通過熱氧化工藝制作氧化層,在結構層硅的上表面沉積一層犧牲層后退火,接著使用濺射和lift-off工藝在結構層硅的上表面制備金屬電極,使用深度反應離子刻蝕圖形化結構層硅,然后沉積正面保護層,翻轉硅片,背面襯底套刻,最后釋放可動結構。制備出的微型電場傳感器SEM照片如圖4所示。該芯片樣機的尺寸為3.5mm×3.5mm。
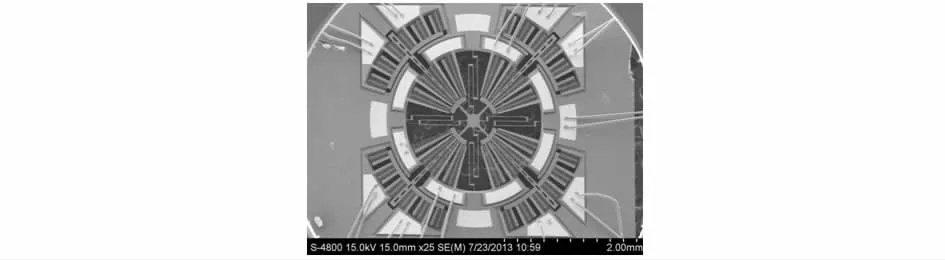
圖4 微型二維電場傳感器SEM照Fig 4 SEM photograph of micro two-dimensionalelectric field sensor
在室溫常壓下,將微型電場傳感器置于自動標定系統中進行測試實驗。首先對微型電場傳感器進行單軸標定。當外加電場平行于X軸方向時,如圖5(a)所示,X軸分量有較好的線性響應,線性度為2.24 %,靈敏度kxx為0.683 mV/(kV/m),由于軸間耦合,Y軸分量也存在線性響應,線性度為6.22 %,靈敏度kyx為0.215 mV/(kV/m)。耦合是由電場畸變、電路元器件精度有限和加工所得各電場測量單元不完全一致等原因引起的。同樣的原因,當外加電場平行于Y軸方向時,如圖5(b)所示,Y軸分量有較好的線性響應,線性度為4.13 %,靈敏度kyy為0.689 mV/(kV/m),X軸分量響應較小,線性度為1.25 %,靈敏度kxy為0.180 mV/(kV/m)。因此,考慮軸間耦合的影響,并引入軸間靈敏度系數,可得到計算方程
Vx=kxxEx+kxyEy,
(1)
Vy=kyyEy+kyxEx.
(2)
通過以上計算方法可以求解出待測電場的X分量與Y分量,再將兩分量矢量合成即可得出待測電場的值。
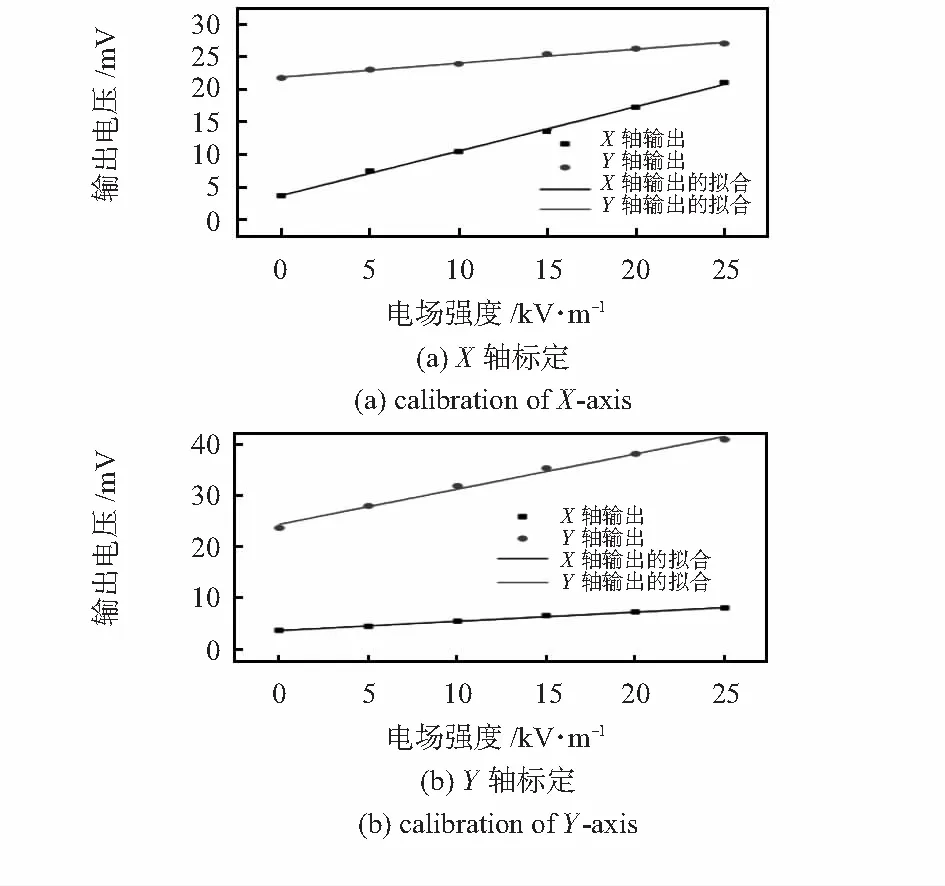
圖5 電場單軸標定Fig 5 Uniaxial calibration of electric field
在0~25 kV/m的范圍內,將電場傳感器任意旋轉了6個角度,每個角度相隔5 kV/m計算電場值,并擬合直線。如圖6所示,理論曲線是一條斜率為1的直線,擬合所得直線與理論曲線一致性較好,最大偏差為7.04 %。誤差的主要來源是系統誤差,包含包括直流源表的輸出誤差、標定極板尺寸誤差、夾具形狀尺寸誤差、夾具材料對源電場的影響等,傳感器表面溫度、濕度、靜電荷積累等因素也會造成測量存在誤差。由圖6可見,本文提出的微型二維電場傳感器可以較為準確地測量X-Y二維電場。
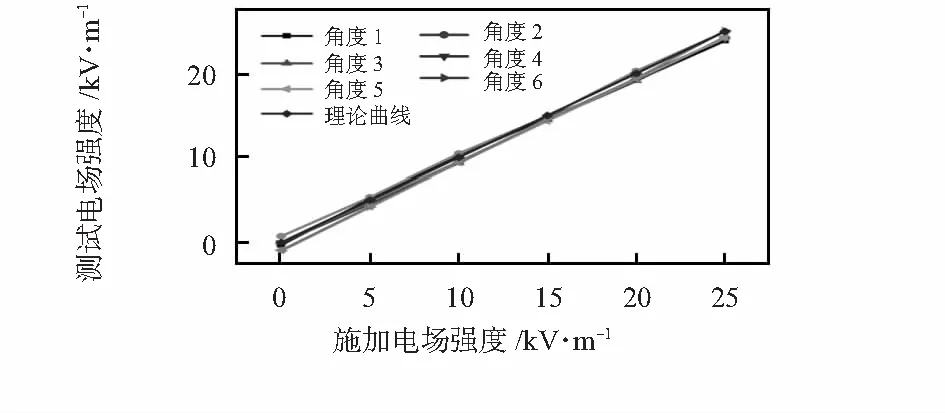
圖6 六個任意角度下微型二維電場傳感器的響應Fig 6 Responses of micro two-dimensional electricfield sensor with six random incident angles
4結論
本文研制出一種新型的單芯片微型二維電場傳感器,電場測量單元的差分型布置方案有效地減小了電場耦合干擾,研究了單芯片微型二維電場傳感器的加工方法,并成功制備出傳感器原理樣機,傳感器芯片尺寸為3.5 mm×3.5 mm,有效減小了電場測量系統的體積;設計了用于電場二維標定的測試裝置,并在室溫常壓下對傳感器進行二維標定。實驗結果表明:該傳感器在0~25 kV/m的電場強度范圍內,測量誤差優(yōu)于7.04 %,線性度最佳可達到1.25 %。
參考文獻:
[1]Nag A,Rakov V A,Tsalikis D,et al.Characteristics of the initial rising portion of near and far lightning return stroke electric field waveforms[J].Atmospheric Research,2012,117(12):71-77.
[2]Zeng Q,Wang Z,Guo F,et al.The application of lightning forecasting based on surface electrostatic field observations and radar data[J].Journal of Electrostatics,2013,71(1):6-13.
[3]Daniel A,Joan M,Gloria S,et al.On the lightning hazard warning using electrostatic field:Analysis of summer thunderstorms in Spain[J].Journal of Electrostatics,2009,67:507-512.
[4]Chen Xianxiang,Peng Chunrong,Tao Hu,et al.Thermally driven micro-electrostatic fieldmeter[J].Sensors and Actuators A,2006,132:677-682.
[5]Bahreyni B,Wijeweera G,Shafai C,et al.Analysis and design of a micro-machined electric-field sensor[J].Journal of Micro-electromechanical Systems,2008,17(1):31-36.
[6]Kobayashi T,Oyama S,Takahashi M,et al.MEMS-based electrostatic field sensor using Pb(Zr,Ti)O3thin films[J].Japanese Journal of Applied Physics,2008,47(9):7533-7536.
[7]Simon Ghionea,Gabriel Smith,Jeffrey Pulskamp,et al.MEMS electric-field sensor with lead zirconate titanate(PZT)-actuated electrodes[C]∥Proceedings of IEEE 2013 Sensors Conference,Baltimore,2013:1-4.
[8]Horenstein M N,Stone P R.A micro-aperture electrostatic field mill based on MEMS technology[J].Journal of Electrostatics,2001,51/52:515-521.
[9]Riehl P S,Scott K L,Muller R S,et al.Electrostatic charge and field sensors based on micromechanic resonators[J].Journal of Micro-electro-mechanical Systems,2003,12(5):577-589.
[10] Yang P F,Peng C R,Zhang H Y,et al.A high sensitivity SOI electric-field sensor with novel comb-shaped microelectrodes[C]∥Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference,Beijing,2011:1034-1037.
[11] 聞小龍,彭春榮,方東明,等.基于共面去耦結構的空間三維電場測量方法[J].電子與信息學報,2014,36(10):2504-2508.
[12] Yeh J A,Chen C N,Lui Y S.Large rotation actuated by in-plane rotary comb-drives with serpentine spring suspension[J].Journal of Micromechanics and Microengineering,2005,15:201-206.
Monolithic two-dimensional electric field sensor based on rotary resonant structure*
WANG Yu1,2, FANG Dong-ming1, CHEN Bo1, PENG Chun-rong1, XIA Shan-hong1
(1.State Key Laboratory of Transducer Technology,Institute of Electronics,Chinese Academy of Sciences,Beijing 100190,China; 2.University of Chinese Academy of Sciences,Beijing 100049,China)
Abstract:A two-dimensional electric field detecting sensing chip is presented,researched and fabricated, which integrates four electric field measurement micro unit and rotary driving micro structure on 3.5 mm×3.5 mm sensitive structure to realize monolithic two-dimensional electric field measurement.Working principle of the sensor,design of sensing structure and fabrication technology of monolithic two-dimensional electric field micro sensor based on SOI process are introduced.The prototype of the proposed sensor is successfully fabricated,and the calibration method and the calibration equipment are developed to conduct two-dimensional calibration experiments at room temperature and ordinary pressure.The test results show that the proposed sensor effectively eliminates the cross-axis coupling interference of electric field,and measurement error is prior to 7.04 %,and the linearity can achieve 1.25 %.
Key words:electric field sensor; MEMS; SOI; rotary resonant micro actuator; two-dimensional measurement; electric field calibration
DOI:10.13873/J.1000—9787(2016)02—0103—03
收稿日期:2015—05—06
*基金項目:國家自然科學基金資助項目(61201078,61327810)
中圖分類號:TP 212.1
文獻標識碼:A
文章編號:1000—9787(2016)02—0103—03
作者簡介:
王宇(1988-),男,山東青島人,博士研究生,研究方向為微型電場傳感器。
夏善紅,通訊作者,E—mail:shxia@mail.ie.ac.cn。
