基于人工魚群算法優(yōu)化SVM的手部動(dòng)作sEMG識(shí)別*
2016-06-13 09:09:30洪潔,王璐,汪超,魏偉,葉曄
傳感器與微系統(tǒng) 2016年2期
關(guān)鍵詞:模式識(shí)別
洪 潔, 王 璐, 汪 超, 魏 偉, 葉 曄
(安徽工業(yè)大學(xué) 機(jī)械工程學(xué)院,安徽 馬鞍山 243002)
?
基于人工魚群算法優(yōu)化SVM的手部動(dòng)作sEMG識(shí)別*
洪潔, 王璐, 汪超, 魏偉, 葉曄
(安徽工業(yè)大學(xué) 機(jī)械工程學(xué)院,安徽 馬鞍山 243002)
摘要:為了提高人體手部運(yùn)動(dòng)模式識(shí)別的準(zhǔn)確性,提出了一種基于人工魚群算法優(yōu)化支持向量機(jī)(SVM)的模式識(shí)別方法。該方法對(duì)采集的表面肌電信號(hào)(sEMG)去噪后提取小波系數(shù)最大值作為特征樣本,將提取后的特征輸入到SVM進(jìn)行動(dòng)作模式識(shí)別,同時(shí)采用人工魚群算法優(yōu)化SVM(AFSVM)的懲罰參數(shù)和核函數(shù)參數(shù),避免參數(shù)選擇的盲目性,提高模型的識(shí)別精度。通過對(duì)內(nèi)翻、外翻、握拳、展拳四種動(dòng)作仿真結(jié)果表明:該方法與傳統(tǒng)的SVM方法相比具有更高的識(shí)別率。
關(guān)鍵詞:表面肌電信號(hào); 模式識(shí)別; 人工魚群算法; 支持向量機(jī); 參數(shù)優(yōu)化
0引言
表面肌電信號(hào)(surface electromyography,sEMG)是通過表面肌電拾取電極從人體皮膚表面記錄下來的,能夠反映神經(jīng)肌肉系統(tǒng)相關(guān)活動(dòng)信息的微弱生物電信號(hào)[1]。不同的肢體動(dòng)作對(duì)應(yīng)不同的肌肉收縮模式,相應(yīng)的肌電信號(hào)特征也會(huì)有所差異,通過對(duì)這些特征的研究有助于進(jìn)行肢體的不同動(dòng)作模式識(shí)別。近年來,隨著計(jì)算機(jī)等技術(shù)的發(fā)展,國內(nèi)外學(xué)者提出了很多sEMG用于動(dòng)作的識(shí)別的方法,主要包括隱馬爾可夫模型方法、模糊模式識(shí)別方法、神經(jīng)網(wǎng)絡(luò)方法等,并取得了大量研究成果[2~5]。
支持向量機(jī)(support vector machine,SVM)是以統(tǒng)計(jì)學(xué)習(xí)理論為基礎(chǔ)發(fā)展起來的一種新的機(jī)器學(xué)習(xí)方法,具有很好的泛化能力與實(shí)時(shí)性,已經(jīng)成為目前國內(nèi)外研究的熱點(diǎn),在解決小樣本、非線性及高維模式識(shí)別問題中表現(xiàn)出許多特有的優(yōu)勢[6],在模式識(shí)別領(lǐng)域得到了廣泛的應(yīng)用。但是SVM的性能的好壞,主要取決于模型參數(shù)(懲罰參數(shù)、核函數(shù)參數(shù))的選擇。人工魚群算法(artificial fish swarm algorithm,AFSA)是李曉磊[7]通過模仿魚類行為方式提出的一種基于動(dòng)物行為的新型群體智能優(yōu)化算法。該算法具有良好的全局搜索能力,并具有對(duì)初值與參數(shù)選擇不敏感、魯棒性好、簡單易實(shí)現(xiàn)和使用靈活等諸多優(yōu)點(diǎn)[8]。
本文基于AFSA強(qiáng)大的尋優(yōu)能力和SVM在模式識(shí)別方面的獨(dú)特的優(yōu)勢提出一種基于AFSA優(yōu)化SVM(AFSA optimization of SVM,AFSVM)的sEMG模式識(shí)別方法。采用AFSVM的懲罰參數(shù)和核函數(shù)參數(shù),將優(yōu)化后的SVM用于sEMG的模式識(shí)別中。
1AFSVM參數(shù)
SVM是基于統(tǒng)計(jì)學(xué)習(xí)理論和結(jié)構(gòu)風(fēng)險(xiǎn)最小化準(zhǔn)則,其基本思想是將原輸入空間的樣本通過非線性變換映射到高維空間中,在高維空間中找出求取最優(yōu)的線性分類平面。它是一種性能十分優(yōu)越的分類器,分類原理可見文獻(xiàn)[9]。但SVM的分類效果受到自身模型參數(shù)(懲罰參數(shù) 、核函數(shù))的影響較大,在實(shí)際應(yīng)用中,為了獲取精度更高的SVM分類器,需要對(duì)SVM自身模型參數(shù)(懲罰參數(shù) 、核函數(shù))進(jìn)行優(yōu)化調(diào)整。AFSA是一種基于動(dòng)物行為的新型高效群體智能優(yōu)化算法,它通過模擬魚類的覓食、聚群、追尾及隨機(jī)行為,通過不斷調(diào)整自己的位置,最終集結(jié)在收索區(qū)域中食物最豐富的地方,進(jìn)而實(shí)現(xiàn)全局尋優(yōu)。算法的數(shù)學(xué)模型描述如文獻(xiàn)[6]。本文利用AFSA強(qiáng)大的尋優(yōu)能力對(duì)SVM的懲罰參數(shù)C和核函數(shù)參數(shù)σ進(jìn)行優(yōu)化調(diào)整,以獲得精度更高、分類效果更佳的SVM分類器。
AFSVM參數(shù)流程圖如圖1。
算法實(shí)現(xiàn)過程如下:
1)設(shè)定人工魚群的參數(shù),產(chǎn)生初始魚群。
2)根據(jù)個(gè)體特征設(shè)定SVM的參數(shù)向量(C,σ)的范圍,將樣本集輸入SVM。
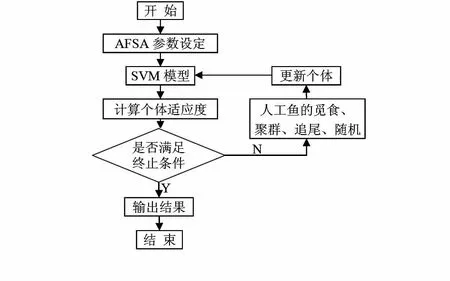
圖1 AFSVM參數(shù)流程圖Fig 1 Flow chart of AFSVM parameters
模型進(jìn)行測試,得到的樣本的識(shí)別率,根據(jù)SVM分類決策函數(shù)計(jì)算個(gè)體的適應(yīng)度,將適應(yīng)度最大者作為當(dāng)前魚群的最優(yōu)值并保存當(dāng)前最優(yōu)值所對(duì)應(yīng)的(C,σ)。
3)各人工魚分別模擬聚群行為和追尾行為,并按照適用度大的行為實(shí)際執(zhí)行,缺省行為方式為覓食行為。
4)在各人工魚每行動(dòng)一次后,計(jì)算一次當(dāng)前的最大適應(yīng)度并與已保存的最大適應(yīng)度進(jìn)行對(duì)比,如果大于,則自身取代之,并保存其所對(duì)應(yīng)的(C,σ);否則,仍保存原適應(yīng)度和最優(yōu)值所對(duì)應(yīng)的(C,σ)。
5)判斷是否滿足算法的的終止條件,即是否達(dá)到預(yù)設(shè)魚群的最大迭代次數(shù),若滿足,則輸出最優(yōu)解;否則,重復(fù)執(zhí)行步驟(3)、步驟(4),直到滿足終止條件,輸出最優(yōu)解。
2實(shí)驗(yàn)與結(jié)果分析
2.1sEMG的采集與預(yù)處理


本次實(shí)驗(yàn)任取每個(gè)動(dòng)作的70組特征向量作為訓(xùn)練集,剩下的30組作為測試集,在進(jìn)行模式識(shí)別前,需預(yù)先設(shè)定各動(dòng)作的標(biāo)簽以作為模式識(shí)別的標(biāo)準(zhǔn),各動(dòng)作對(duì)應(yīng)的標(biāo)簽如表1。
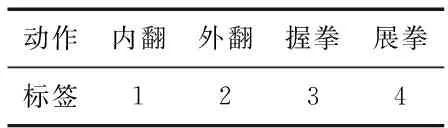
表1 動(dòng)作模式識(shí)別標(biāo)簽
2.2模型建立與實(shí)驗(yàn)與結(jié)果分析
設(shè)初始人工魚群數(shù)量為20,最大迭代次數(shù)為20,人工魚的感知范圍為0.01,人工魚移動(dòng)的最大步長為0.01,最大試探次數(shù)為5,擁擠度因子為0.618,當(dāng)進(jìn)化到最大迭代次數(shù)時(shí)尋優(yōu)終止。尋優(yōu)過程如圖2所示,從第一代時(shí)候便搜索到最優(yōu)值,此時(shí)便可得到最優(yōu)懲罰參數(shù)C=62.9344,核函數(shù)σ=0.2338。
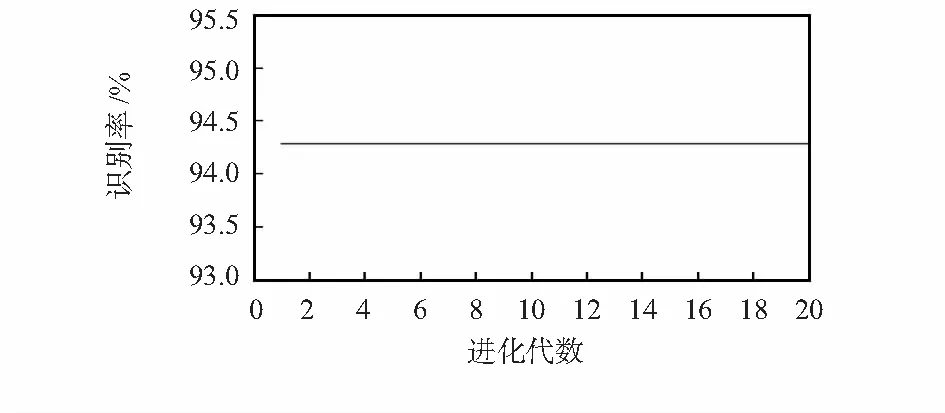
圖2 AFSA參數(shù)尋優(yōu)適應(yīng)度曲線Fig 2 Fitness curve of AFSA parameter optimization
最后建立的AFSVM分類器,將訓(xùn)練集數(shù)據(jù)輸入SVM分類器進(jìn)行訓(xùn)練,然后將測試集數(shù)據(jù)輸入SVM分類器進(jìn)行模式分類,識(shí)別結(jié)果如圖3所示。為了比較分類器的性能,利用常用的k折交叉驗(yàn)證(k-fold cross validation)法進(jìn)行測試及訓(xùn)練。參考文獻(xiàn)[11],這里取k=10,即對(duì)每一個(gè)手臂動(dòng)作,將訓(xùn)練集數(shù)據(jù)均分為10組,輪流將其中的9份用來訓(xùn)練1份用來測試,將測試得到識(shí)別率最高時(shí)對(duì)應(yīng)的參數(shù)作為最終分類器的參數(shù),識(shí)別結(jié)果如圖4所示。將兩種方法進(jìn)行對(duì)比,對(duì)比識(shí)別結(jié)果分別如表2和表3所示。從表中可知,采用10-fold交叉驗(yàn)證法對(duì)內(nèi)翻、外翻、握拳、展拳四種動(dòng)作的識(shí)別率分別為:93.3 %,100 %,100 %,93.3 %,平均識(shí)別為達(dá)96.7 %。采用AFSA優(yōu)化方法對(duì)內(nèi)翻、外翻、握拳、展拳四只動(dòng)作的識(shí)別率分別為:96.7 %,100 %,100 %,100 %,平均識(shí)別率達(dá)99.2 %,識(shí)別效果更理想。
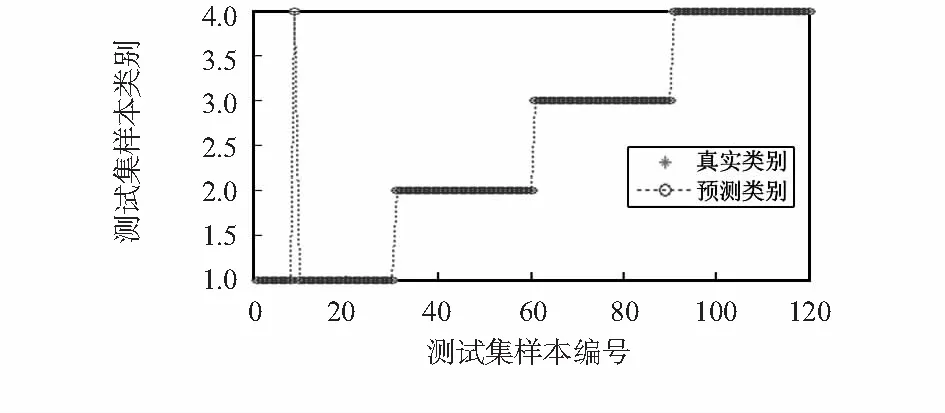
圖3 AFSVM識(shí)別結(jié)果Fig 3 Recognition results based on AFSVM
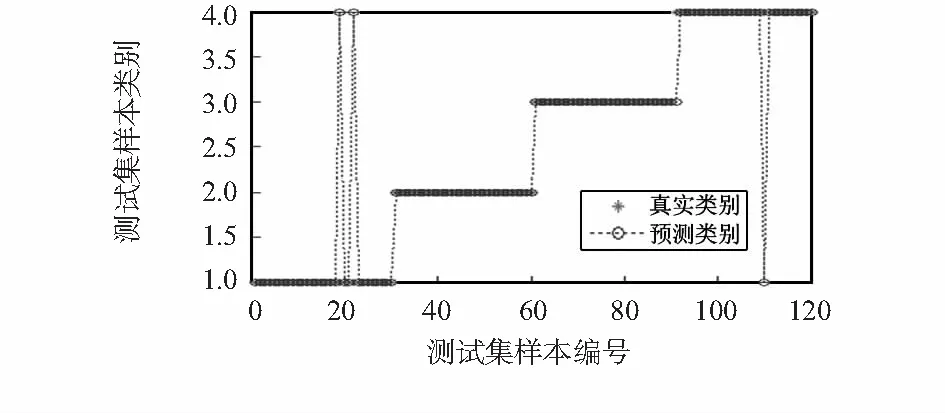
圖4 10-fold交叉驗(yàn)證法識(shí)別結(jié)果圖Fig 4 Recognition results based on 10-fold cross validation method
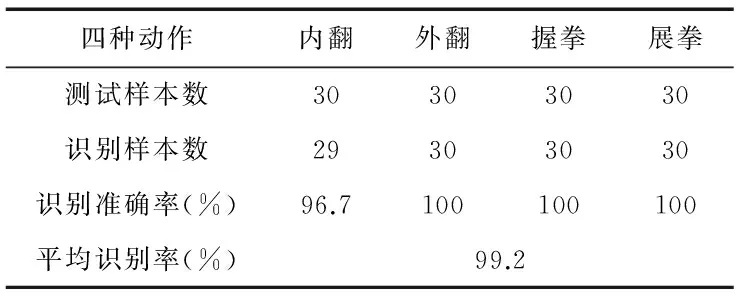
四種動(dòng)作內(nèi)翻外翻握拳展拳測試樣本數(shù)30303030識(shí)別樣本數(shù)29303030識(shí)別準(zhǔn)確率(%)96.7100100100平均識(shí)別率(%)99.2
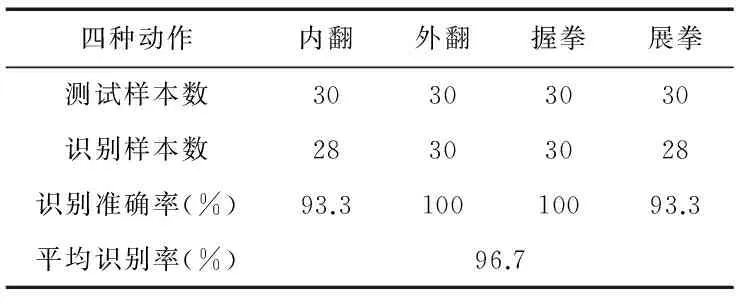
表3 10-fold交叉驗(yàn)證法的四種動(dòng)作識(shí)別結(jié)果
表2與表3表明的結(jié)果表明,在人體前臂動(dòng)作肌電信號(hào)的識(shí)別方面,AFSA能夠更準(zhǔn)確到懲罰參數(shù)C、核函數(shù)σ的最優(yōu)組合,使得SVM的識(shí)別誤差減小,識(shí)別準(zhǔn)確率上升。與傳統(tǒng)的參數(shù)選擇相比,采用AFSVM優(yōu)化SVM參數(shù)的方法不但能減少計(jì)算量,還能提高SVM分類器的性能。
3結(jié)論
本文基于AFSA強(qiáng)大的尋優(yōu)能力和SVM在模式識(shí)別方面的獨(dú)特的優(yōu)勢提出一種基于AFSVM的sEMG模式識(shí)別方法。采用EMD小波閾值的方法對(duì)采集手部動(dòng)作兩路sEMG進(jìn)行去噪,提取小波系數(shù)最大值作為特征矢量,并用AFSVM的參數(shù)進(jìn)行優(yōu)化,提高了模式識(shí)別的準(zhǔn)確率,是一種有效的、可靠的sEMG模式識(shí)別方法。
參考文獻(xiàn):
[1]De Luca,Carlp J.Physiology and mathematics of my electric signals[J].IEEE Transactions on Biomedical Engineering,1979,26(6):313-325.
[2]陳貴亮,周曉晨.基于HMM的下肢表面肌電信號(hào)模式識(shí)別研究[J].機(jī)械設(shè)計(jì)與制造,2015(1):39-42.
[3]Kamel Mebarkia.Fuzzy MUAP recognition in HSR-EMG detection basing on morphological features[J].Journal of Electromyography and Kinesiology,2014,24(4):473-487.
[4]Mane S M,Kambli R A.Hand motion recognition from single channel surface EMG using wavelet & artificial neural network[J].Procedia Computer Science,2015,49:58-65.
[5]Swathi S Dhage,Sushma Shridhar Hegde.DWT-based feature extraction and radon transform based contrast enhancement for improved iris recognition[J].Procedia Computer Science,2015,45:256-265.
[6]Vapnik V.Statistical learning theory [M].New York:Wiley,1998.
[7]李曉磊.一種新型的智能優(yōu)化算法—人工魚群算法[D].杭州:浙江大學(xué),2003.
[8]黃柏儒,樊曉光,禚真福.引入貪心魚群的改進(jìn)人工魚群算法[J].傳感器與微系統(tǒng), 2015,34(5):119-122.
[9]高劍,羅志增.支持向量機(jī)在肌電信號(hào)模式識(shí)別中的應(yīng)用[J].傳感技術(shù)學(xué)報(bào),2007,20(2):366-369.
[10] 洪潔,王璐,舒軍勇,等.基于EMD小波閾值的表面肌電信號(hào)去噪研究[J].重慶理工大學(xué)學(xué)報(bào):自然科學(xué)版,2015,29(8):124-128.
[11] Ahmet Alkan,Mucahid Gunay.Identification of EMG signals using discriminant analysis and SVM classifier[J].Expert Systems with Applications,2012,39(1):44-47.
Recognition of sEMG hand actions based on artificial fish swarm algorithm optimized SVM*
HONG Jie, WANG Lu, WANG Chao, WEI Wei, YE Ye
(School of Mechanical Engineering,Auhui University of Technology,Maanshan 243002,China)
Abstract:To improve accuracy of human hand motion pattern recognition,a pattern recognition method for optimizing support vector machine(SVM) by using artificial fish swarm algorithm(AFSA) is proposed.The maximum value of wavelet coefficients is extracted as feature samples from the de-noised surface electromyography(sEMG) signals,then the extracted feature is inputted into a SVM to classify actions recognition,and at the same time,AFSA is used to optimize the penalty parameters and the kernel parameters of the SVM,which avoids the blindness of parameters selection and improves recognition precision of the model.Simulation results show that four movements(wrist down,wrist up,hand grasps,hand extension) are successfully identified by the method of SVM combined with AFSA.Compared with the traditional SVM method,the method has higher recognition accuracy.
Key words:surface electromyography(sEMG); pattern recognition; artificial fish swarm algorithm(AFSA); support vector machine(SVM); parameters optimization
DOI:10.13873/J.1000—9787(2016)02—0023—03
收稿日期:2015—12—08
*基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(61375068);教育部人文社科研究項(xiàng)目(11YJC630208,13YJAZH106);安徽省高等學(xué)校省級(jí)自然科學(xué)研究重點(diǎn)項(xiàng)目(KJ2013A056);安徽省優(yōu)秀青年人才基金重點(diǎn)項(xiàng)目(2013SQRL023ZD)
中圖分類號(hào):TP 391.4
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1000—9787(2016)02—0023—03
作者簡介:
洪潔(1988-),男,安徽廬江人,碩士研究生,主要研究方向?yàn)樾盘?hào)處理、運(yùn)動(dòng)仿真。
王璐,通訊作者,E—mail:wanglu@ahut.edu.cn。
猜你喜歡
中成藥(2018年2期)2018-05-09 07:19:52
智能系統(tǒng)學(xué)報(bào)(2018年6期)2018-02-04 11:23:57
中成藥(2017年10期)2017-11-16 00:50:05
電子測試(2017年23期)2017-04-04 05:06:50
智能系統(tǒng)學(xué)報(bào)(2017年5期)2017-01-22 11:21:30
電測與儀表(2016年6期)2016-04-11 12:07:48
海軍航空大學(xué)學(xué)報(bào)(2015年1期)2015-11-11 17:17:57
智能系統(tǒng)學(xué)報(bào)(2015年3期)2015-01-29 15:20:12
電測與儀表(2014年15期)2014-04-04 12:05:20
河南科技(2014年5期)2014-02-27 14:08:35
