基于磁阻傳感芯片陣列的磁導引AGV傳感器設計
2016-06-13 08:43:12夏繼強滿慶豐
傳感器與微系統 2016年3期
沈 忱, 夏繼強, 滿慶豐, 丁 攀
(北京航空航天大學 機械工程及自動化學院,北京 100191)
?
基于磁阻傳感芯片陣列的磁導引AGV傳感器設計
沈忱, 夏繼強, 滿慶豐, 丁攀
(北京航空航天大學 機械工程及自動化學院,北京 100191)
摘要:介紹了一種基于磁阻傳感芯片設計的通用磁導引自動導航小車(AGV)傳感器。根據測量得到的磁導引AGV使用磁條的磁場分布,提出使用磁阻傳感芯片HMC1021組成線陣的測量方案,并設計了硬件電路。利用不同標定位置的磁阻傳感芯片的輸出結果,擬合磁場強度與芯片標定位置的二次函數關系,計算得到磁條中心與傳感器中心的橫向偏移距離。通過實驗驗證了設計的傳感器的準確性,并提出減小誤差的方法和改進方案。
關鍵詞:自動導引小車; 磁阻傳感器; 信號處理; 距離檢測
0引言
自動導航小車(automated guided vehicle, AGV)常用于無人生產車間、倉庫和港口碼頭等場所實現物料的自動搬運,屬于移動機器人的范疇。由于具有動作靈活、工作效率高、智能化等優點,AGV在實際生產中的應用日益廣泛。導引技術是AGV的關鍵技術之一,目前常用的導引方式有磁導引、激光導引、視覺導引等[1],其中,磁導引方式具體又分為磁釘方式和磁條方式。磁導引AGV傳感器能夠通過檢測預鋪設的磁條或磁釘產生的磁場得到小車的位置或姿態信息。為了得到磁場強度與橫向偏差的精確關系,國內外對此都作了深入研究。Young-Jae Ryoo[2]和白智慧[3]提出了磁釘導引方式的偏差檢測算法,徐海貴[4]和Akira Asaoka[5]使用磁傳感陣列在較寬范圍檢測磁場信號,但也是針對磁釘導引方式,朱政[6]和郭磊[7]設計了磁條導引方式的檢測裝置,但其使用的導引磁條并不通用。目前,市場中的磁條導引AGV傳感器較多采用多路IO數字量方式輸出,不能獲得精確偏移距離,日本MACOME公司設計的GS系列傳感器可以輸出與偏移距離線性相關的模擬電壓,但其成本較高。
本文針對目前常用的AGV導引磁條,設計了一種通用的磁導引AGV傳感器,采用CAN總線的方式輸出偏移距離,具有較高精度、成本低、通用性強的特點。
1磁導引傳感器工作原理
目前磁條導引AGV使用的磁條由沾結鐵氧體料粉與合成橡膠復合,經壓延成型等工藝制成,磁條寬度為50 mm,其表面剩磁大約200 Gs,隨著距離的增加,磁場強度迅速減小,圖1是使用高斯計測得磁條在不同高度和偏差距離垂直于磁條方向的磁場強度。
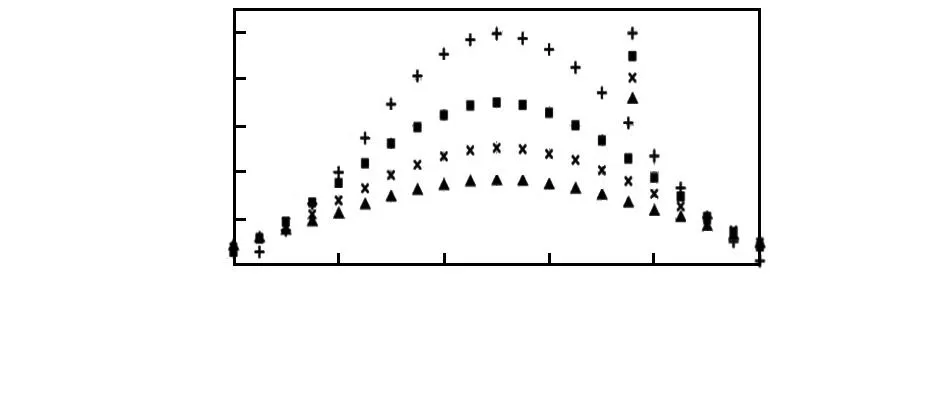
圖1 垂直于磁條方向的磁場大小Fig 1 Magnetic field size perpendicular to directionmagnetic stripe
HMC1021芯片是由Honeywell公司推出的磁阻傳感芯片,它利用電阻在磁場中阻值發生變化的磁阻效應原理,使用惠斯通電橋輸出一個隨外部磁場變化的差分電壓信號。
HMC1021可以測量與芯片管腳平行方向的磁場,測量范圍為±6 Gs,其輸出電壓與測量磁場有良好的線性關系與較高精度(如圖2所示),HMC1021內部的置位/復位電流帶能夠進行自動校準,消除磁性失真現象。
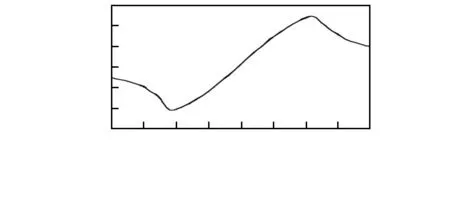
圖2 HMC1021輸出電壓與測量磁場的關系Fig 2 Output voltage vs.magnetic field of HMC1021
基于以上原理,本文采用磁阻傳感芯片HMC1021組成的線陣,在距離磁條40~70 mm的高度,采集磁條不同橫向距離垂直磁條方向的磁場,通過計算得到傳感器的橫向偏移距離。
2硬件結構設計
本文設計的磁導引AGV傳感器硬件結構主要由4個部分組成,如圖3所示。
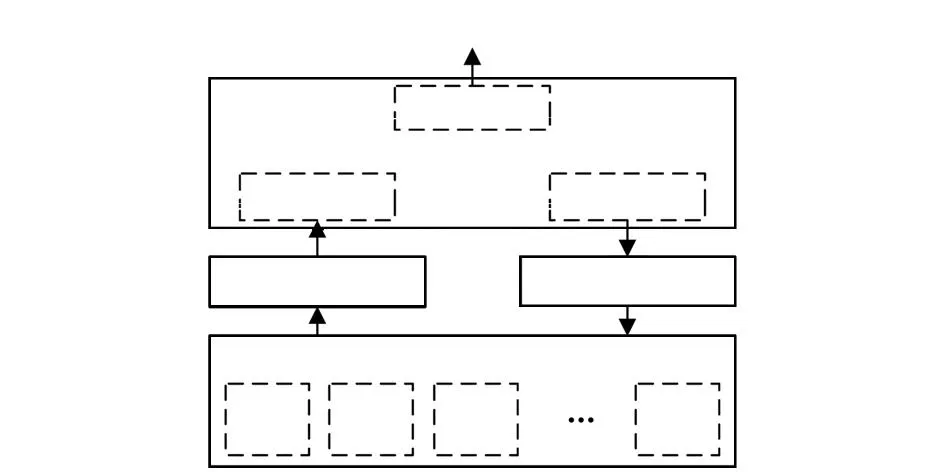
圖3 磁導引AGV傳感器的硬件結構Fig 3 Hardware structure of magnetic guided AGV sensor
2.1磁阻傳感芯片陣列
從圖1測得磁條產生的磁場強度可以看出,其產生的磁場信號比較微弱,將磁阻傳感芯片按照線陣的方式排列可以檢測到較寬的橫向范圍的磁場信息,本設計使用水平間距為15 mm的8個磁阻傳感芯片組成的線陣。
2.2MCU模塊
主控芯片采用STM32F103系列單片機,該芯片采用基于ARM構架的Cortex—M3內核,擁有多路12位A/D轉換輸入端口和CAN通信模塊。STM32通過A/D轉換輸入端口采集磁阻傳感芯片陣列的輸出,并將計算結果通過CAN通信模塊發送給主控制器或上位機。
2.3放大濾波電路
使用儀表放大器將磁阻傳感芯片的輸出進行放大和偏置,并配合低通濾波器減小噪聲以適合STM32的A/D采樣輸入。
2.4置位/復位電路
通過STM32芯片IO口控制置位/復位電路產生一個瞬時脈沖強電流,恢復磁阻傳感芯片內磁性元素的排列方向,保證其磁場測量輸出特性。
3橫向平移距離的計算方法
為了得到精確的傳感器橫向偏移距離,需要對磁阻傳感芯片陣列采集到的磁場信號進行計算處理。信號的處理主要分為兩步:一是消除采集誤差;二是通過算法得到傳感器的橫向偏移距離[8]。
3.1芯片校準與誤差消除
由于磁阻傳感芯片的個體差異,芯片內電橋輸出有不同的零點偏移,并且環境溫度也會影響其偏移程度,因此,在采集磁場信號前需要使用置位/復位脈沖消除固定偏差[9]。磁阻傳感芯片輸出的背景噪聲來源有地磁場、交流電流以及其他外部電子設備,其中,地磁場是噪聲的主要來源,其他噪聲可以認為是白高斯噪聲,通過對磁阻傳感芯片輸出多次采樣求平均值的方式可以減小噪聲影響。地磁場的大小隨空間中不同的方向而發生變化,但在垂直于地面的方向其大小和方向近似為恒定值[10],其影響表現為對每一路采集結果都有相同的偏移,采用適當的算法可以消除地磁場的影響。
3.2橫向偏移距離算法
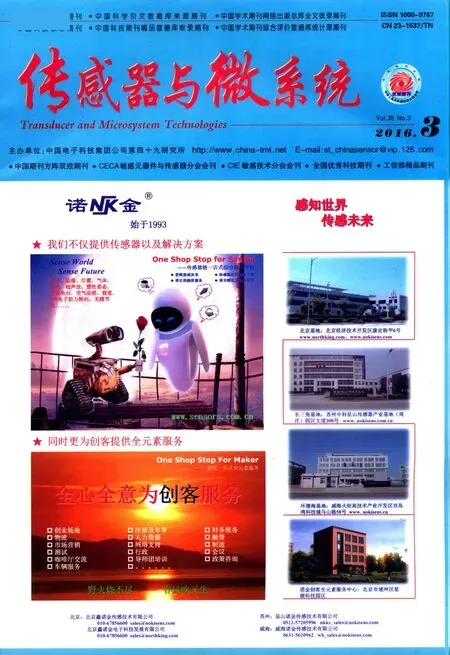
由圖1可以發現,在距離磁條40~70 mm的高度下,磁條正上方區域(±25 mm),磁場Bv與橫向偏移距離x近似呈現二次關系。選定磁阻傳感芯片陣列中心為坐標原點,第i個磁阻傳感芯片的位置為橫坐標xi,其電壓輸出值為yi,可以得到坐標系中的8個點Bi(xi,yi)(i=1,2,…,8),如圖4所示。地磁場的影響只是對8個點整體的上下平移,對于這些點的變化趨勢沒有影響,所以,可以不考慮地磁場對于傳感芯片輸出的偏置。選擇電壓輸出值較大的連續點Bm~Bn進行二次曲線擬合,得到磁場強度與橫向偏移距離的關系
y=a0+a1x+a2x2,
(1)
則認為二次曲線極值點位置為磁條中心,因此,可以得到磁條中心相對于磁阻傳感芯片陣列中心的偏移距離
xm=-2a2/a1.
(2)
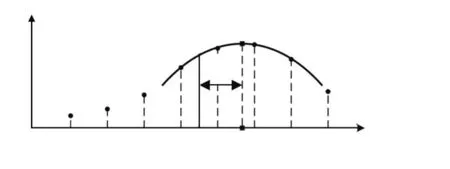
圖4 磁阻傳感芯片陣列的輸出電壓Fig 4 Output voltage of magnetoresistive sensing chip array
在二次曲線的擬合計算過程中,有大量的矩陣相關運算,可以離線計算一些矩陣分解的結果,并保存到單片機中,單片機只需要通過查表方式就能快速完成矩陣運算。使用這樣的方法能有效減小控制器的運算量,提高傳感器的采集效率,傳感器的輸出周期能達到10 ms,滿足大多數AGV的控制要求。
4實驗結果與分析
4.1測試與實驗結果
測試中,以磁條中心為基準,在距離磁條40~70 mm的高度測量不同橫向偏移距離傳感器的輸出。實驗中,磁傳感器每橫向移動5 mm記錄一次測量結果,如表1。從測量結果中可以看出:本文設計的磁導引AGV傳感器的橫向偏移距離測量結果誤差可以保證在3 mm以內,可以達到大部分AGV的控制精度。
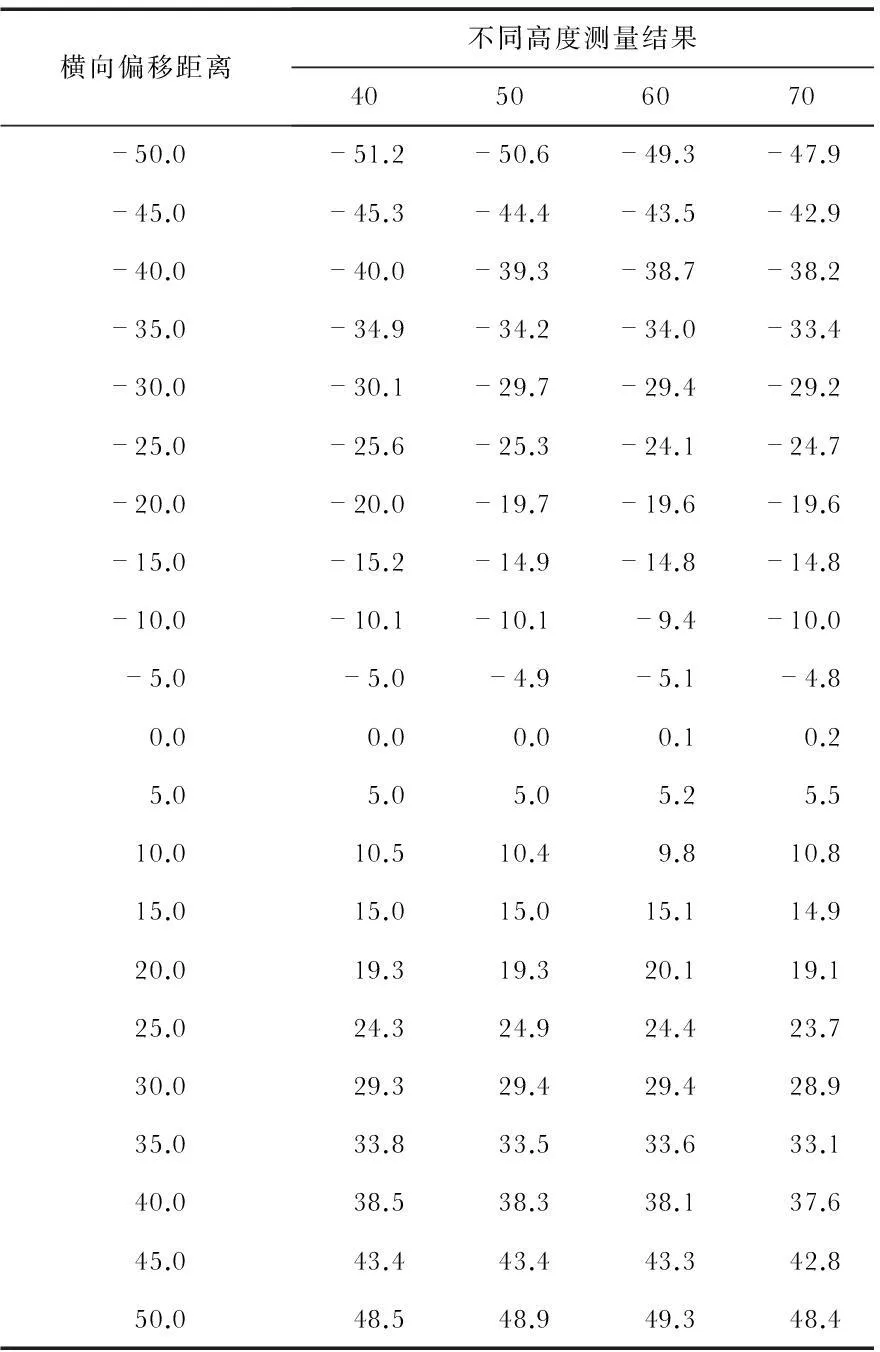
表1 磁導引AGV傳感器測量結果(mm)
4.2實驗結果分析
由測量結果可以看出:在傳感器與磁條中心偏移距離較小時,測量誤差也較小,但隨著偏移距離的增加,測量誤差也逐漸增大。原因是,當偏移距離較大時,傳感芯片陣列中采集到的有效磁場信息較少,在計算過程中參加擬合的點也較少,因此,可能產生較大的誤差。此外,本設計采用多個磁阻傳感芯片和多個運放的方案,不同運放電路放大倍數的差異也會導致磁場采集的誤差。
在實際應用中,由于磁導引AGV使用的磁條產生的磁場比較微弱,在磁條周圍的金屬都會較大地影響其磁場分布,并最終導致傳感器不能正確得到偏移距離。因此,應盡量保證磁條與AGV車體間有較大的間距,減小金屬材料對于磁條產生的磁場的影響。此外,使用更多的磁阻傳感芯片得到更多的采樣點,提高計算的擬合精度,從而得到更精確的偏移距離;而且在保存磁阻傳感芯片間距不變的條件下增加磁阻傳感芯片的數量還可以增加傳感器的橫向測量范圍。
5結束語
本文基于磁阻傳感芯片HMC1021設計了一種具有通用性的磁導引AGV傳感器。使用本文設計的硬件結構和電路,此傳感器的橫向偏移距離檢測范圍為±50 mm,誤差小于3 mm,響應時間10 ms,通過增加磁阻傳感芯片的數量(保持芯片間距不變)可以增加傳感器橫向檢測范圍。該傳感器適用于目前使用較廣的通用AGV磁條,并且只要擁有CAN通信接口的車載控制器就可以使用,具有較強的通用性。
參考文獻:
[1]張辰貝西,黃志球.自動導航車(AGV)發展綜述[J].中國制造業信息化,2010,39(1):53-59.
[2]Ryoo Y,Kim E,Lim Y,et al.Design of magnet-based position sensing system for autonomous vehicle robot[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots & Systems,Sendai:IEEE,2004:2378-2383.
[3]白智慧.磁導航傳感器系統的設計與開發[D].武漢:武漢理工大學,2008.
[4]徐海貴.基于磁阻傳感器陣列的車輛自主導航系統研究[D].上海:上海交通大學,2009.
[5]Asaoka A,Ueda S.An experimental study of a magnetic sensor in an automated highway system[C]∥Proceedings of the 1996 IEEE Intelligent Vehicles Symposium, New Jersey:IEEE,1996:373-378.
[6]朱政,張世平,孫金瑋.基于磁檢測的AGV導引新方法[J].宇航計測技術,2008,28(4):12-15.
[7]郭磊.戶外自主輪式機器人磁導航系統研究[D].重慶:重慶大學,2012.
[8]Chan C.Magnetic sensing as a position reference system for ground vehicle control[J].IEEE Transactions on Instrumentation & Measurement,2002,51(1):43-52.
[9]董雨.基于HMC1022的雙軸磁阻傳感器的研究和應用[D].長春:吉林大學,2009.
[10] Dae-Yeong Im,Young-Jae Ryoo,Soon-Gil Park,et al.Development of magnetic position sensor for unmanned driving of robotic vehicle[C]∥2009 IEEE Conf on Sensors,Christchurch:IEEE,2009:1618-1622.
Design of magnetic guided AGV sensor based on magnetoresistive sensing chip array
SHEN Chen, XIA Ji-qiang, MAN Qing-feng, DING Pan
(School of Mechanical Engineering and Automation,Beihang University,Beijing 100191,China)
Abstract:A design of general magnetic guided automated guided vehicle(AGV) sensor based on magnetoresistive sensor is introduced.According to magnetic field distribution of magnetic stripe used in AGV,a measurement solution using magnetoresistive sensing chip HMC1021 to form array is proposed,hardware circuit is designed.Quadratic function relationship between magnetic field intensity and chip calibration position is fitted by using output of magnetoresistive sensing chips in different calibration position,the lateral offset distance between center of magnetic stripe and sensor is obtained by calculation is proved by experiment accuracy of AGV sensor,and methods for decreasing error and improvement scheme are proposed.
Key words:automated guided vehicle(AGV); magnetoresistive sensor; signal processing; distance detection
DOI:10.13873/J.1000—9787(2016)03—0108—03
收稿日期:2015—06—30
中圖分類號:TP 216
文獻標識碼:A
文章編號:1000—9787(2016)03—0108—03
作者簡介:
沈忱(1990-),男,四川眉山人,碩士研究生,研究方向為嵌入式控制系統。